

Joint Trajectory and Resource Allocation Optimization for Air-ground Collaborative Integrated Sensing and Communication Systems
-
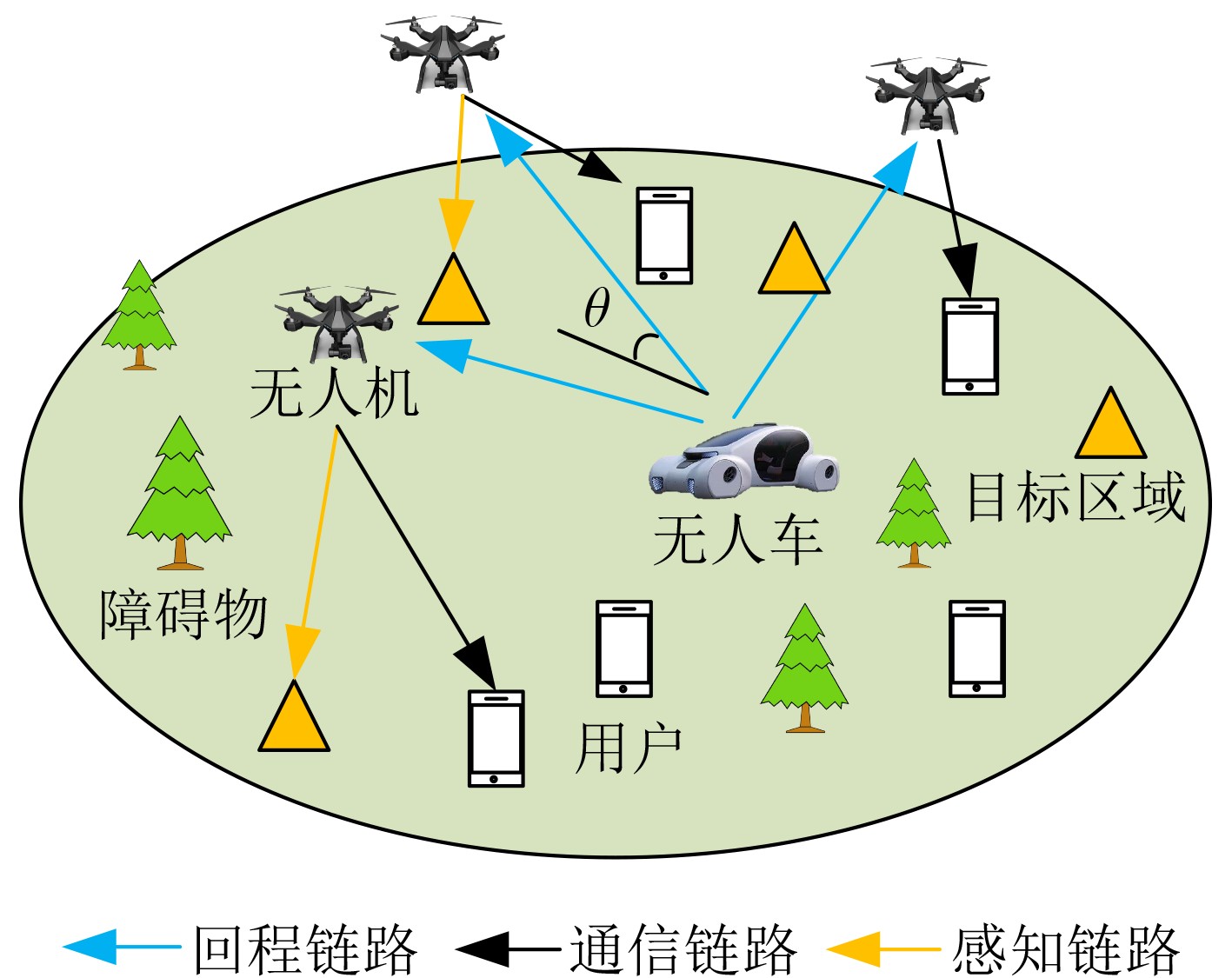
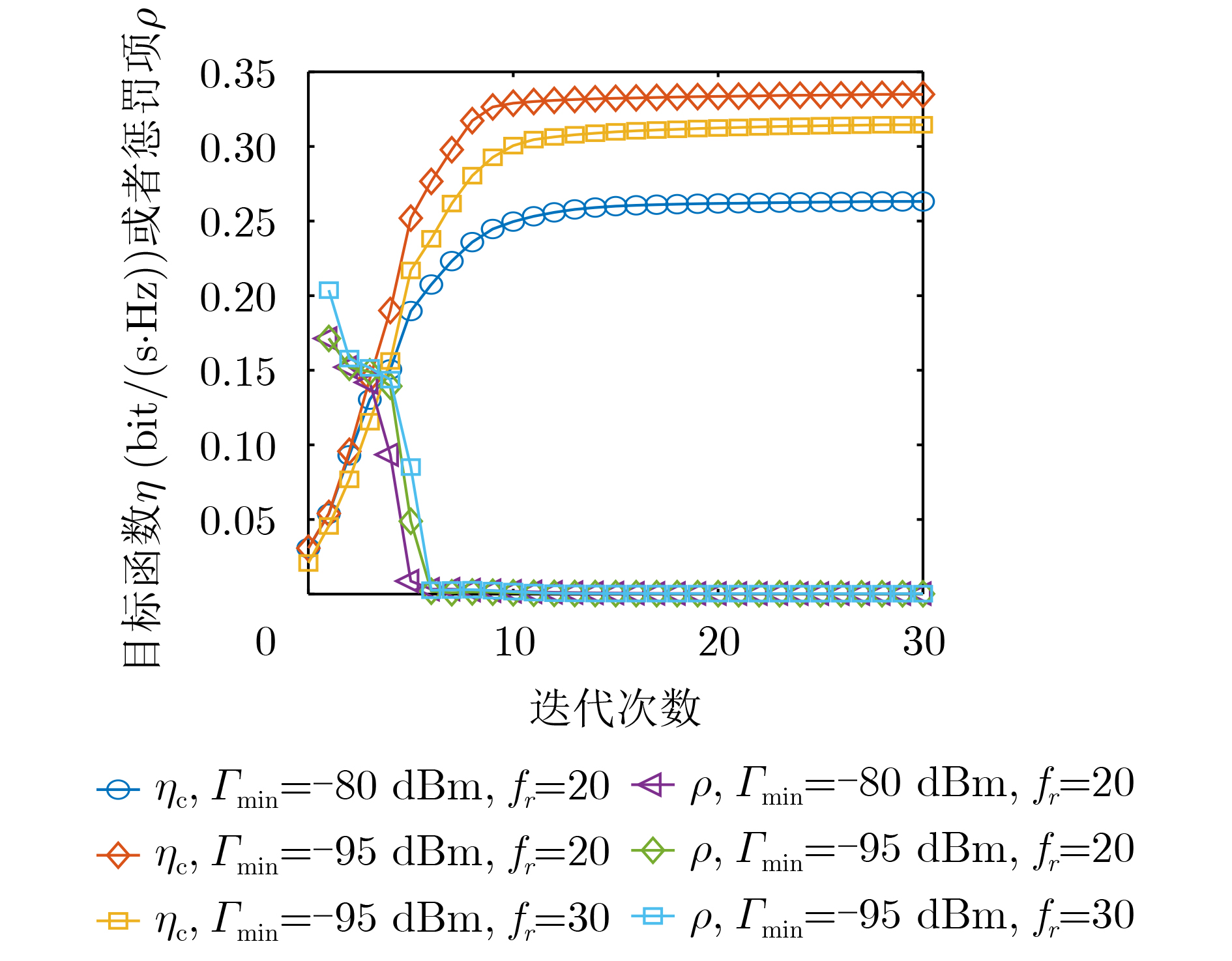
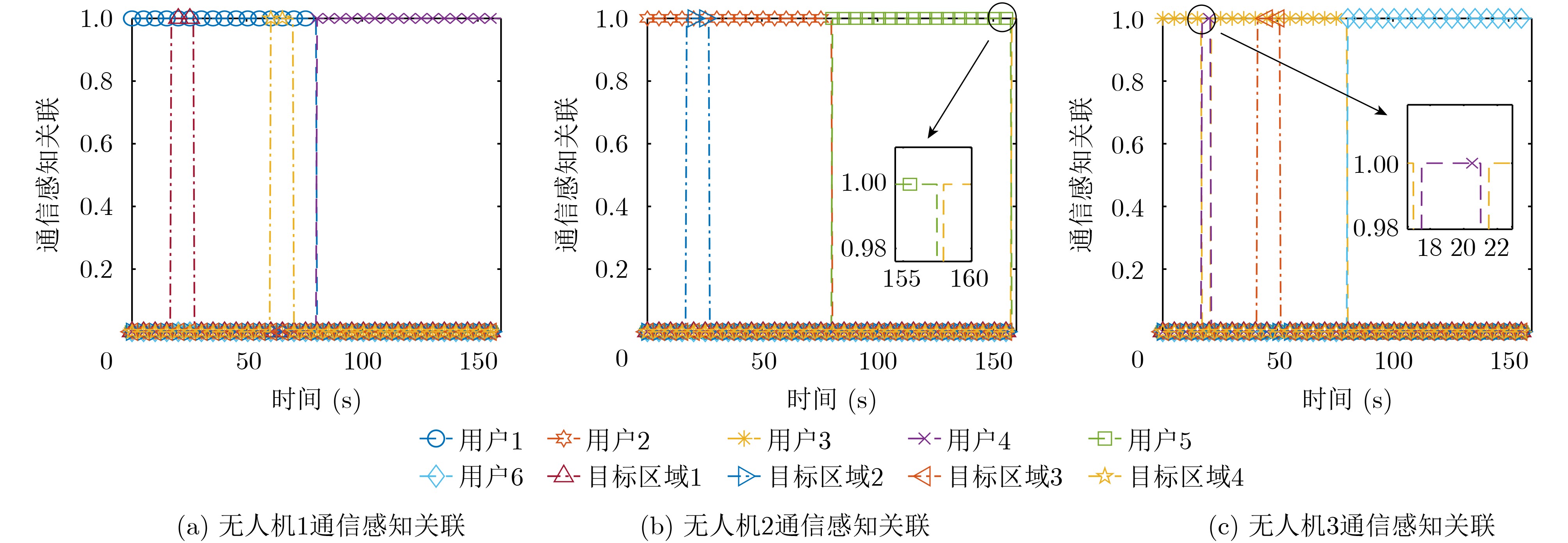
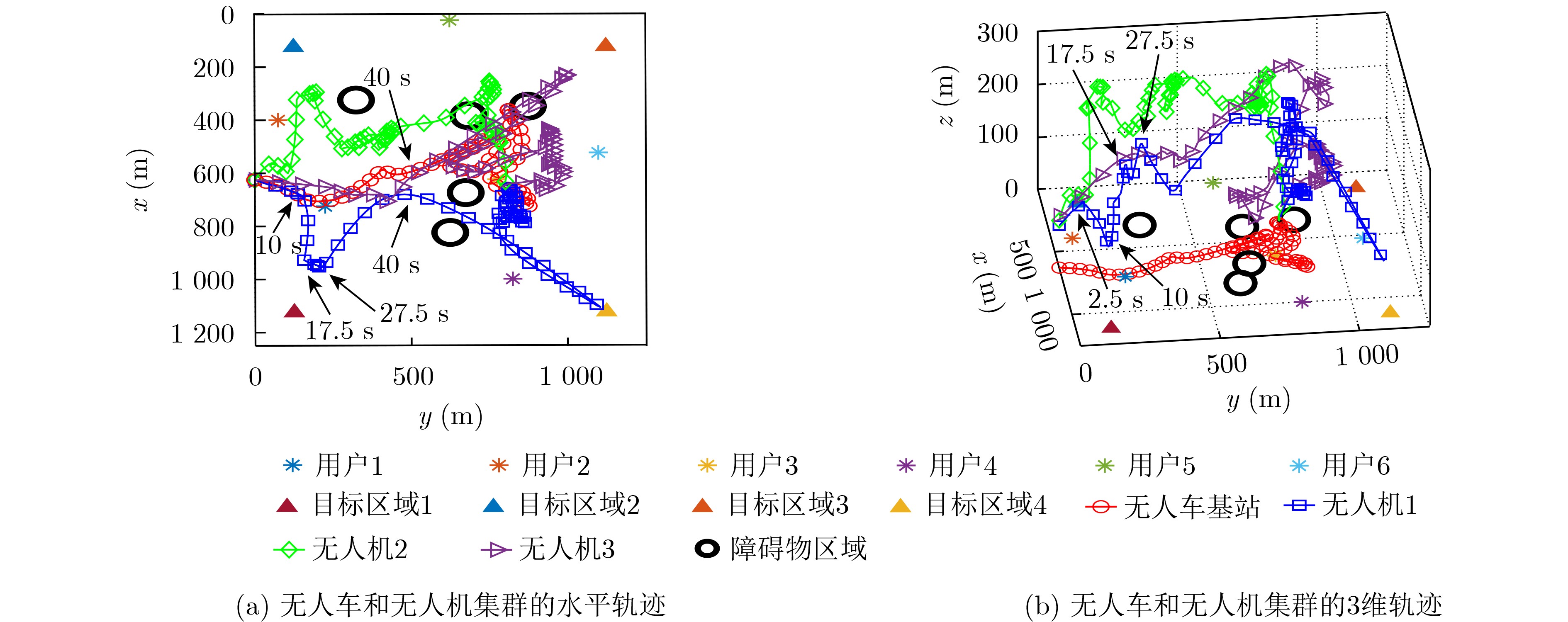
摘要: 该文研究空地协同通信感知一体化系统,其中无人车(UGV)基站和无人机(UAV)中继集群组成空地协同网络,为用户提供通信服务,同时对目标区域进行探测感知。在更加准确的莱斯衰落信道模型下,研究联合优化无人机集群的通信感知关联、发射功率和飞行轨迹以及无人车基站的发射功率和行进轨迹,在目标区域感知频率和有效感知功率阈值的约束下,最大化用户最小平均通信速率。为了解决变量高度耦合且非凸的整数优化问题,首先利用块坐标下降法将原问题分解成4个子问题;接着引入松弛变量并将整数约束转化为惩罚项,然后证明莱斯信道下的有效感知功率是关于轨迹变量和松弛变量凸复合函数的联合凸函数;再利用连续凸优化法处理非凸项,并提出一种双层迭代算法高效求解次优解。仿真结果表明,与几种基准方案相比,所提优化算法在相同感知性能下,提高了用户最小平均通信速率,更好地实现了通信与感知性能之间的权衡,并具有良好的收敛性。Abstract: An air-ground collaborative integrated sensing and communication system is studied, where the air-ground collaborative network is composed of an Unmanned Ground Vehicle (UGV) base station and Unmanned Aerial Vehicle (UAV) relays. The network provides communication service for ground users while detecting and sensing target areas. The air-ground channels are modeled as the accurate Rician fading channel model. On the constraints of the sensing frequency and the effective sensing power threshold of the target areas, the minimum average communication rate of all users is maximized by jointly optimizing the communication and sensing association of the system, the transmit power and flight trajectory of the UAV relays, as well as the transmit power and trajectory of the UGV base station. To solve the resultant non-convex integer optimization problem with highly coupled variables, the block coordinate descent method is applied to decompose the original optimization problem into four sub-problems, where relaxation variables are introduced, and the integer constraints are converted into penalty terms. Then, it is proved that the effective sensing power is a composition function of the trajectory variables and the relaxation variables and is a jointly convex function of them, so that the non-convex terms are tackled by using the successive convex optimization method. Lastly, a two-layer iterative algorithm is proposed to obtain the suboptimal solution efficiently. It is shown by simulation results that compared to some benchmark algorithms, the proposed algorithm significantly increases the minimum average communication rate of all users while achieving the same sensing performance and achieves a better performance trade-off between communication and sensing with good convergence performance.
-
1 双层迭代算法
(1) 初始化迭代次数${l_1}$=0和${l_2}$=0,关联变量${{\boldsymbol{A}}^{{l_1},{l_2}}}$和${{\boldsymbol{B}}^{{l_1},{l_2}}}$,功率变量${{\boldsymbol{P}}^{{l_1}}}$,水平轨迹变量${{\boldsymbol{Q}}^{{l_1}}}$,垂直轨迹变量${{\boldsymbol{H}}^{{l_1}}}$,惩罚项系数
${\mu ^{{l_1},{l_2}}}$,目标函数${\eta ^{{l_1}}}$,收敛阈值${\varepsilon _1}$>0, ${\varepsilon _2}$>0,内层循环最大迭代次数${L_2}$(2) repeat (3) 令内层迭代次数${l_2}$=0,repeat (4) 给定{${{\boldsymbol{A}}^{{l_1},{l_2}}}$, ${{\boldsymbol{B}}^{{l_1},{l_2}}}$, ${{\boldsymbol{P}}^{{l_1}}}$, ${{\boldsymbol{Q}}^{{l_1}}}$, ${{\boldsymbol{H}}^{{l_1}}}$},通过式(29)和式(30)计算{${{{\bar {\boldsymbol A}}}^{{l_1},{l_2} + 1}}$, ${{{\bar {\boldsymbol B}}}^{{l_1},{l_2} + 1}}$} (5) 给定{${{{\bar {\boldsymbol A}}}^{{l_1},{l_2} + 1}}$, ${{{\bar {\boldsymbol B}}}^{{l_1},{l_2} + 1}}$, ${\mu ^{{l_1},{l_2}}}$},通过求解P4得到{${{\boldsymbol{A}}^{{l_1},{l_2} + 1}}$, ${{\boldsymbol{B}}^{{l_1},{l_2} + 1}}$, ${\rho ^{{l_1},{l_2} + 1}}$} (6) 更新惩罚项系数${\mu ^{{l_1},{l_2} + 1}}$, ${l_2} = {l_2} + 1$ (7) until${\rho ^{{l_1},{l_2}}} \le {\varepsilon _2}$ or ${l_2} \ge {L_2}$ (8) 更新${{\boldsymbol{A}}^{{l_1} + 1}} = {{\boldsymbol{A}}^{{l_1},{l_2}}}$, ${{\boldsymbol{B}}^{{l_1} + 1}} = {{\boldsymbol{B}}^{{l_1},{l_2}}}$,计算$\eta _1^{{l_1} + 1}$ (9) 给定{${{\boldsymbol{A}}^{{l_1} + 1}}$, ${{\boldsymbol{B}}^{{l_1} + 1}}$, ${{\boldsymbol{Q}}^{{l_1}}}$, ${{\boldsymbol{H}}^{{l_1}}}$},通过求解P5得到{${{\boldsymbol{P}}^{{l_1} + 1}}$, $\eta _2^{{l_1} + 1}$} (10) 给定{${{\boldsymbol{A}}^{{l_1} + 1}}$, ${{\boldsymbol{B}}^{{l_1} + 1}}$, ${{\boldsymbol{P}}^{{l_1} + 1}}$, ${{\boldsymbol{H}}^{{l_1}}}$},通过求解P6得到{${{\boldsymbol{Q}}^{{l_1} + 1}}$, $\eta _3^{{l_1} + 1,{\text{lb}}}$} (11) 给定{${{\boldsymbol{A}}^{{l_1} + 1}}$, ${{\boldsymbol{B}}^{{l_1} + 1}}$, ${{\boldsymbol{P}}^{{l_1} + 1}}$, ${{\boldsymbol{Q}}^{{l_1} + 1}}$},通过求解P7得到{${{\boldsymbol{H}}^{{l_1} + 1}}$, $ \eta _4^{{l_1} + 1,{\text{lb}}} $} (12) 更新${l_1} = {l_1} + 1$, ${{\boldsymbol{A}}^{{l_1},0}} = {{\boldsymbol{A}}^{{l_1} - 1}}$, ${{\boldsymbol{B}}^{{l_1},0}} = {{\boldsymbol{B}}^{{l_1} - 1}}$, ${\mu ^{{l_1},0}}$,计算${\eta ^{{l_1}}}$ (13) until $ \dfrac{{{\eta ^{{l_1}}} - {\eta ^{{l_1} - 1}}}}{{{\eta ^{{l_1} - 1}}}} \lt {\varepsilon _1} $  下载: 导出CSV
下载: 导出CSV
-
[1] LIU Fan, CUI Yuanhao, MASOUROS C, et al. Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond[J]. IEEE Journal on Selected Areas in Communications, 2022, 40(6): 1728–1767. doi: 10.1109/JSAC.2022.3156632. [2] CUI Yuanhao, LIU Fan, JING Xiaojun, et al. Integrating sensing and communications for ubiquitous IoT: Applications, trends, and challenges[J]. IEEE Network, 2021, 35(5): 158–167. doi: 10.1109/MNET.010.2100152. [3] SAAD W, BENNIS M, and CHEN Mingzhe. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems[J]. IEEE Network, 2020, 34(3): 134–142. doi: 10.1109/MNET.001.1900287. [4] ZHANG J A, RAHMAN M L, WU Kai, et al. Enabling joint communication and radar sensing in mobile networks—a survey[J]. IEEE Communications Surveys & Tutorials, 2022, 24(1): 306–345. doi: 10.1109/COMST.2021.3122519. [5] LIU Tianyu, CUI Miao, ZHANG Guangchi, et al. 3D trajectory and transmit power optimization for UAV-enabled multi-link relaying systems[J]. IEEE Transactions on Green Communications and Networking, 2021, 5(1): 392–405. doi: 10.1109/TGCN.2020.3048135. [6] WANG Xinyi, FEI Zesong, ZHANG J A, et al. Constrained utility maximization in dual-functional radar-communication multi-UAV networks[J]. IEEE Transactions on Communications, 2021, 69(4): 2660–2672. doi: 10.1109/TCOMM.2020.3044616. [7] LYU Zhonghao, ZHU Guangxu, and XU Jie. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(4): 2424–2440. doi: 10.1109/TWC.2022.3211533. [8] MENG Kaitao, WU Qingqing, MA Shaodan, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211–1215. doi: 10.1109/LWC.2022.3161338. [9] WU Jun, YUAN Weijie, and BAI Lin. On the interplay between sensing and communications for UAV trajectory design[J]. IEEE Internet of Things Journal, 2023, 10(23): 20383–20395. doi: 10.1109/JIOT.2023.3287991. [10] DENG Cailian, FANG Xuming, and WANG Xianbin. Beamforming design and trajectory optimization for UAV-empowered adaptable integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 8512–8526. doi: 10.1109/TWC.2023.3264523. [11] YOU Changsheng and ZHANG Rui. 3D trajectory optimization in rician fading for UAV-enabled data harvesting[J]. IEEE Transactions on Wireless Communications, 2019, 18(6): 3192–3207. doi: 10.1109/TWC.2019.2911939. [12] QIU Chen, WEI Zhiqing, FENG Zhiyong, et al. Joint resource allocation, placement and user association of multiple UAV-mounted base stations with in-band wireless backhaul[J]. IEEE Wireless Communications Letters, 2019, 8(6): 1575–1578. doi: 10.1109/LWC.2019.2928544. [13] WU Silei, XU Wenjun, WANG Fengyu, et al. Distributed federated deep reinforcement learning based trajectory optimization for air-ground cooperative emergency networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(8): 9107–9112. doi: 10.1109/TVT.2022.3175592. [14] ZHOU Yi, CHENG Nan, LU Ning, et al. Multi-UAV-aided networks: Aerial-ground cooperative vehicular networking architecture[J]. IEEE Vehicular Technology Magazine, 2015, 10(4): 36–44. doi: 10.1109/MVT.2015.2481560. [15] KANG Zhenyu, YOU Changsheng, and ZHANG Rui. 3D placement for multi-UAV relaying: An iterative Gibbs-sampling and block coordinate descent optimization approach[J]. IEEE Transactions on Communications, 2021, 69(3): 2047–2062. doi: 10.1109/TCOMM.2020.3043776. [16] ISKANDAR and SHIMAMOTO S. The channel characterization and performance evaluation of mobile communication employing stratospheric platform[C]. IEEE/ACES International Conference on Wireless Communications and Applied Computational Electromagnetics, Honolulu, USA, 2005: 828–831. doi: 10.1109/WCACEM.2005.1469712. [17] MENG Kaitao, WU Qingqing, MA Shaodan, et al. Throughput maximization for UAV-enabled integrated periodic sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(1): 671–687. doi: 10.1109/TWC.2022.3197623. [18] BOYD S and VANDENBERGHE L. Convex Optimization[M]. Cambridge: Cambridge University Press, 2004. doi: 10.1017/CBO9780511804441. -

 下载:
下载:


图(6) / 表(1)
计量
- 文章访问数: 1144
- HTML全文浏览量: 1792
- PDF下载量: 228
- 被引次数: 0
