

Full Channel Estimation for IRS-assisted Millimeter-wave Mobile Communication Systems Based on Fixed Point Deep Learning
-
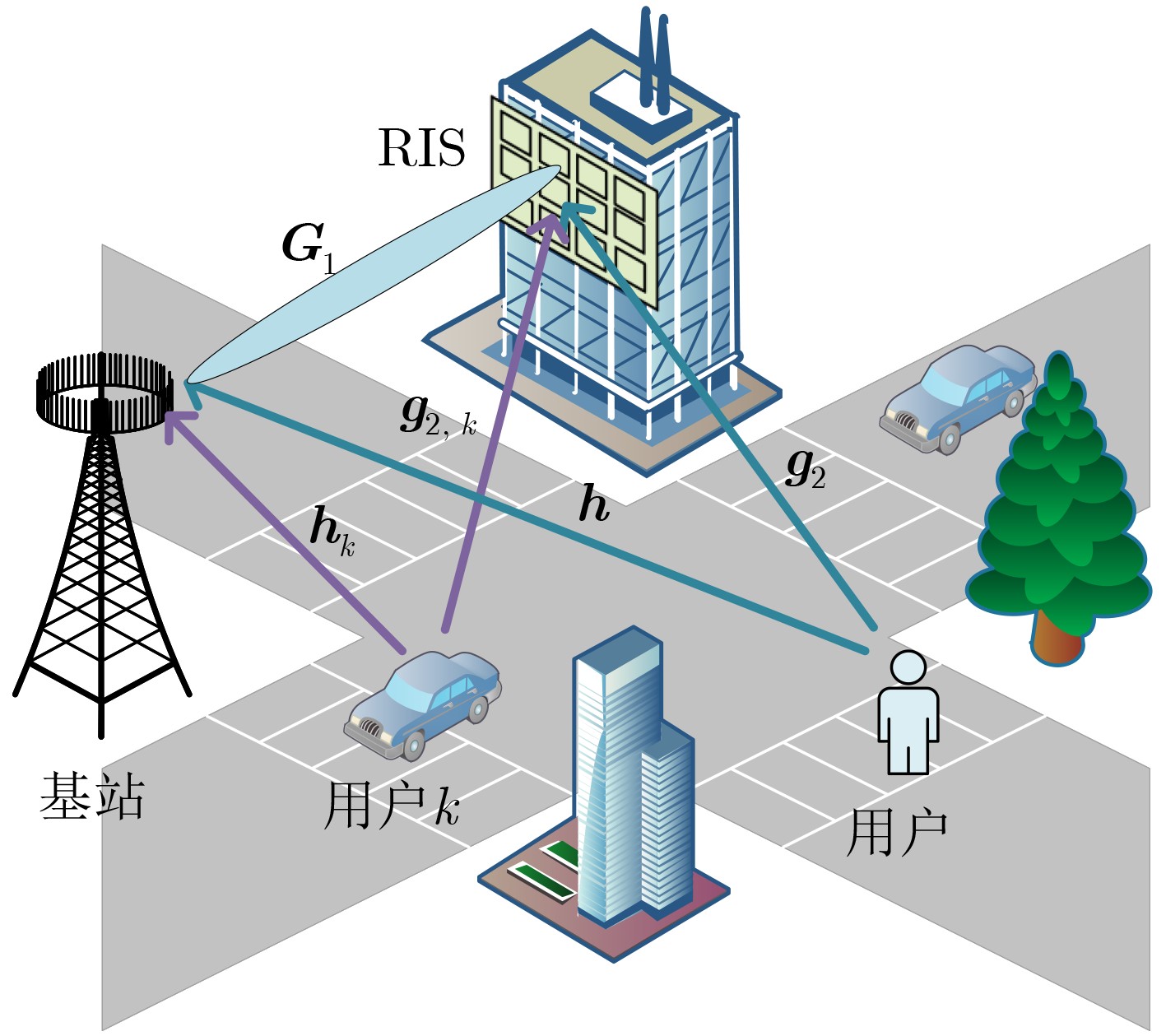
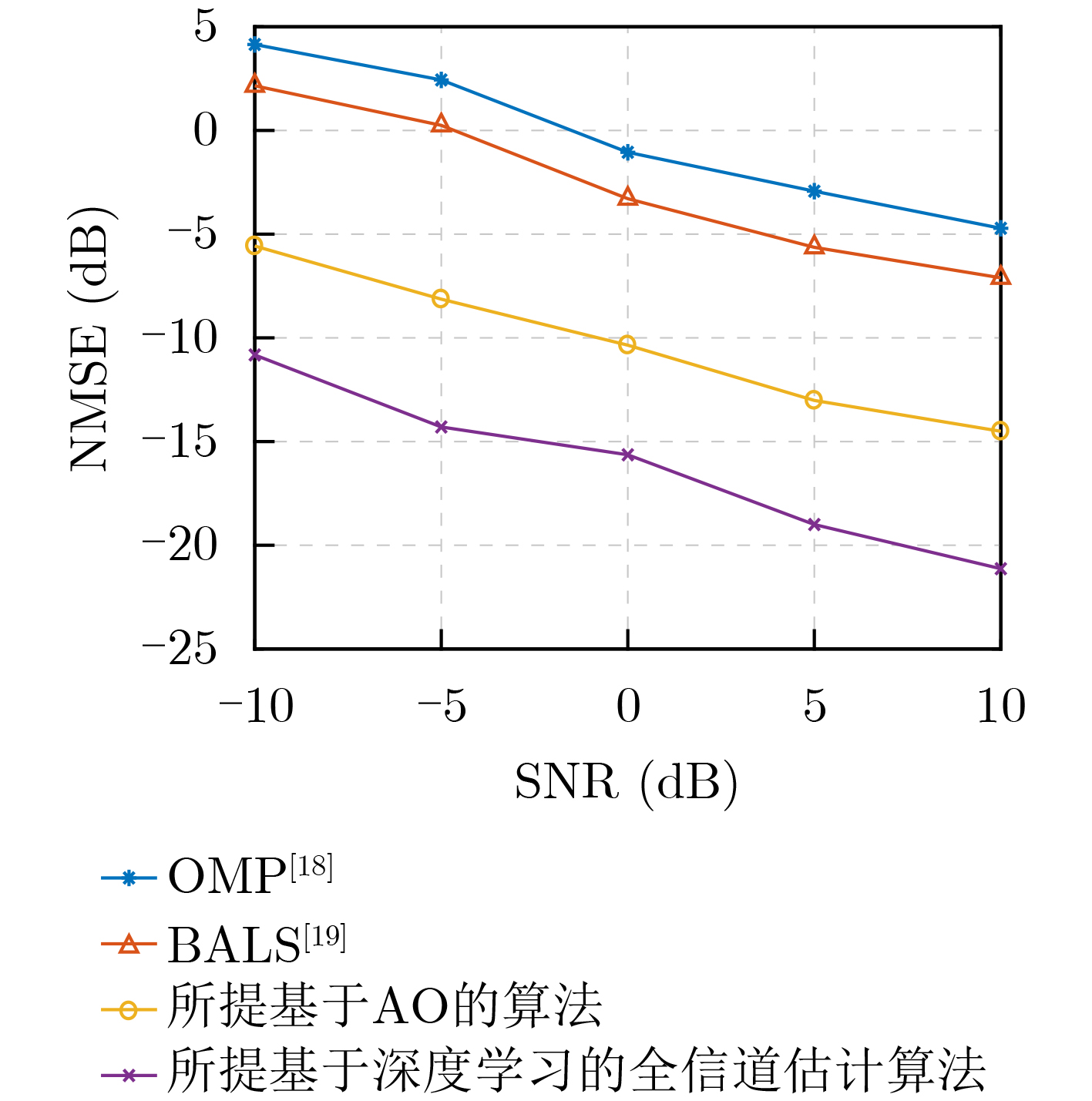
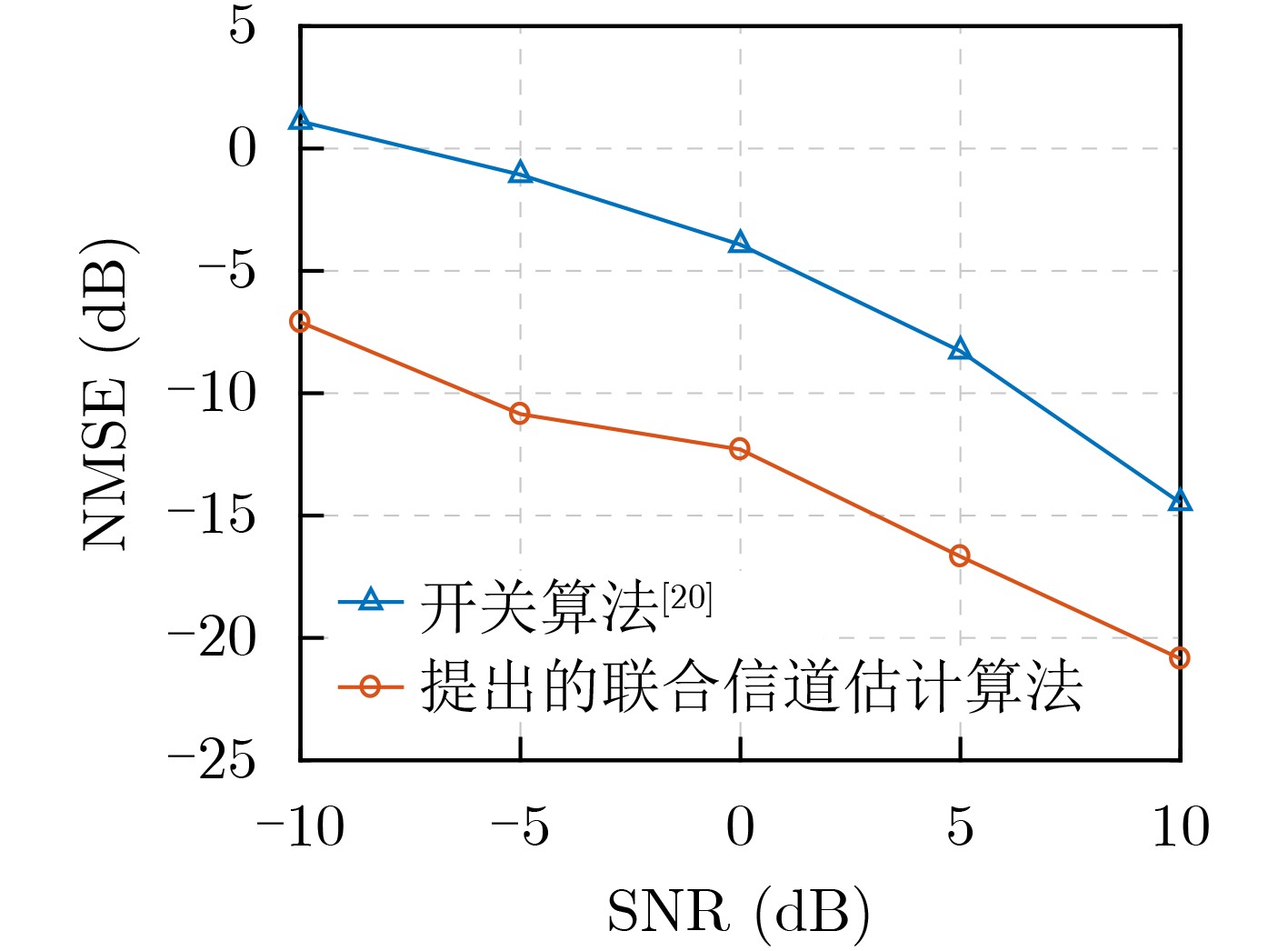
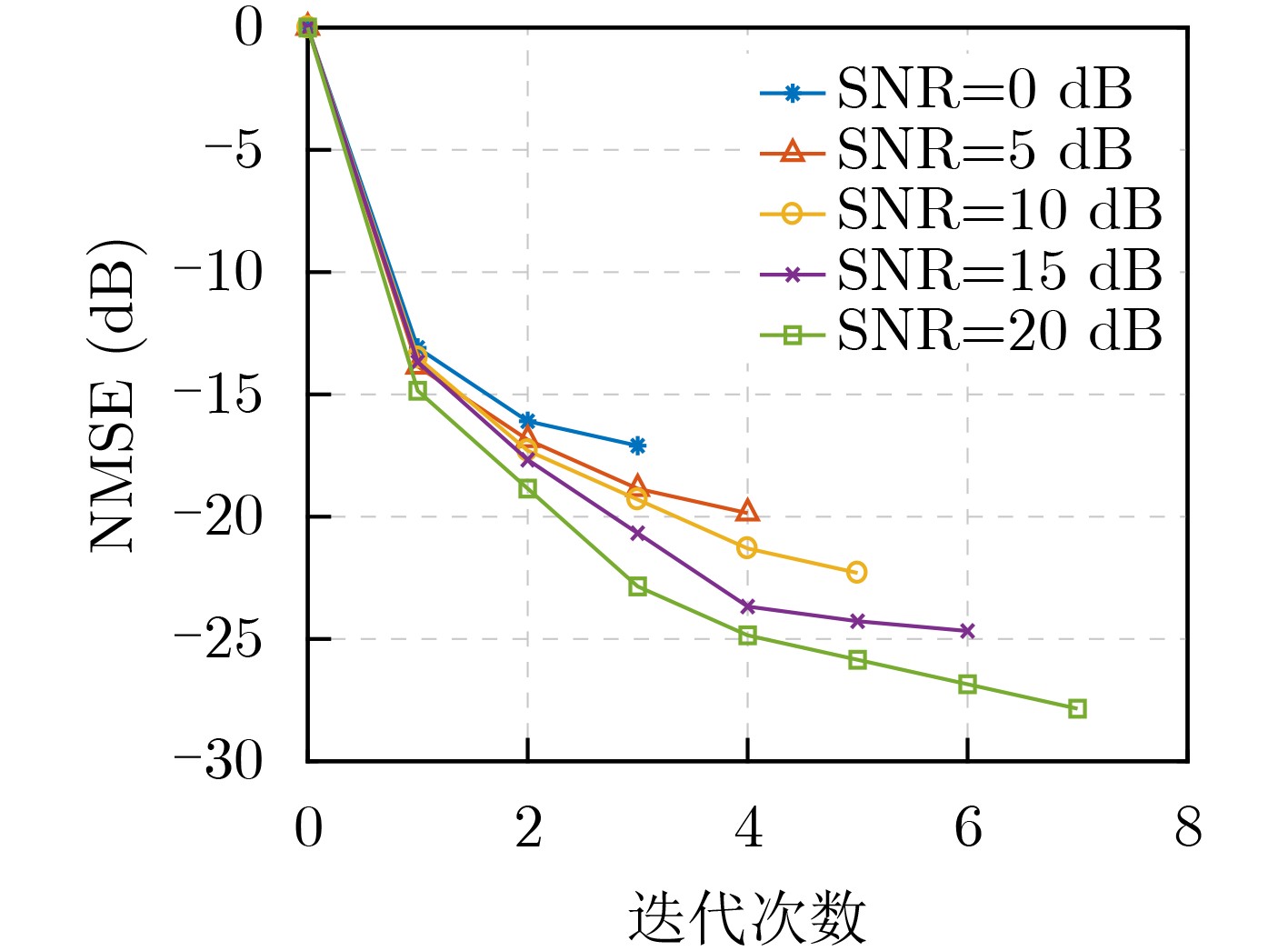
摘要: 将智能反射面(IRS)与大规模MIMO结合能够保证和提高毫米波通信系统性能。针对基站(BS)-用户直连信道与用户-IRS-BS反射信道混叠场景,该文提出一种自适应的全信道估计方法。首先,引入辅助变量,采用原子范数将直连信道与反射信道的稀疏角度域子空间进行关联;然后,利用原子范数最小化将全信道估计问题建模为连续角度域稀疏矩阵重建规划;最后,基于不动点深度学习网络设计低复杂度的问题求解算法。该算法不仅能够克服传统基于模型解法中非线性估计算子对先验知识的依赖还可根据移动场景变化自适应调节算法复杂度。仿真结果表明,所提算法能够避免传统时分估计策略引起的差错传播效应,具有更高的估计精度和更低的复杂度。
-
关键词:
- 智能反射面(IRS) /
- 直连与反射混叠信道估计 /
- 不动点深度学习 /
- 原子范数最小化 /
- 毫米波MIMO
Abstract: Combining Intelligent Reflective Surface (IRS) with massive MIMO can guarantee and improve the performance of millimeter-wave communication systems. An adaptive full-channel estimation method is proposed for the Base Station (BS)-user direct-connect channel and user-IRS-BS reflective channel mixing scenario. First, auxiliary variables are introduced and atomic paradigms are used to correlate the sparse angle-domain subspaces of the direct-connect and reflective channels; then, the full-channel estimation problem is modeled as a continuous angle-domain sparse matrix reconstruction planning by using atomic paradigm minimization; and finally, a low-complexity problem solving algorithm based on the immovable-point deep learning network is designed. The algorithm can not only overcome the dependence of the nonlinear estimation operator on a priori knowledge in the traditional model-based solution method but also adaptively adjust the complexity of the algorithm according to the changes of the mobile scene. Simulation results show that the proposed algorithm can avoid the error propagation effect caused by the traditional time-division estimation strategy, and has higher estimation accuracy and lower complexity. -
1 基于AO的信道估计算法暨稀疏子空间关联过程
输入:问题(P) 输出:反射信道$ \widetilde {\boldsymbol{G}} $,直连信道$ {\boldsymbol{H}} $ · 估计反射信道 (1)根据步骤1估计$ {{\boldsymbol{b}}_k} $ (2)根据步骤2估计$ {\boldsymbol{a}}(M,{\theta _{gr}}) $ (3)根据式(16)得到反射信道$ \widetilde {\boldsymbol{G}} $ · 估计直连信道 (4)根据步骤1得到$ {\boldsymbol{T}}({\boldsymbol{\hat u}}) $,$ {\boldsymbol{\hat v}} $ (5)对$ {\boldsymbol{T}}({\boldsymbol{\hat u}}) $进行范德蒙德分解得到$ {\boldsymbol{a}}(M,{\hat \theta _{k,{L_1}}}) $ (6)根据式(14)得到直连信道$ {\boldsymbol{H}} $  下载: 导出CSV
下载: 导出CSV
2 FPN-Net不动点迭代算法
输入:$ {{\boldsymbol{F}}_1},{{\boldsymbol{F}}_2},{\boldsymbol{Y}} $和NLE的权重$ \varTheta $,误差容限$ \varepsilon $ 初始化:$ {{\boldsymbol{Z}}^{(0)}} \leftarrow 0 $,$ i \leftarrow 0 $ (1)$ {f_\varTheta }( \cdot ;{\boldsymbol{Y}}) $的固定点迭代 (2)while $ {\Vert {{\boldsymbol{Z}}}^{(i)}-{f}_{\varTheta }({{\boldsymbol{Z}}}^{(i)};{\boldsymbol{Y}})\Vert }_{{\mathrm{F}}} \gt \varepsilon $do (3)$ {{\boldsymbol{Z}}^{(i + 1)}} \leftarrow {f_\varTheta }({{\boldsymbol{Z}}^{(i)}};{\boldsymbol{Y}}) $ (4)$ i \leftarrow i + 1 $ (5)$ {{\boldsymbol{Z}}^*} \leftarrow {{\boldsymbol{Z}}^i} $ (6)end while (7)返回$ {{\boldsymbol{Z}}^*} $
下载: 导出CSV
表 1 基于深度学习的全信道估计算法的主要参数
参数名称 数值 最大周期数 150 训练批量数 128 验证批量数 2000 学习率 1e–3 训练集 80000 验证集 5000 测试集 5000
下载: 导出CSV
-
[1] DI RENZO M, ZAPPONE A, DEBBAH M, et al. Smart radio environments empowered by reconfigurable intelligent surfaces: How it works, state of research, and the road ahead[J]. IEEE Journal on Selected Areas in Communications, 2020, 38(11): 2450–2525. doi: 10.1109/JSAC.2020.3007211. [2] SCHROEDER R, HE Jiguang, BRANTE G, et al. Two-stage channel estimation for hybrid RIS assisted MIMO systems[J]. IEEE Transactions on Communications, 2022, 70(7): 4793–4806. doi: 10.1109/TCOMM.2022.3176654. [3] MISHRA D and JOHANSSON H. Channel estimation and low-complexity beamforming design for passive intelligent surface assisted MISO wireless energy transfer[C]. 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 2019: 4659–4663. doi: 10.1109/ICASSP.2019.8683663. [4] MIRZA J and ALI B. Channel estimation method and phase shift design for reconfigurable intelligent surface assisted MIMO networks[J]. IEEE Transactions on Cognitive Communications and Networking, 2021, 7(2): 441–451. doi: 10.1109/TCCN.2021.3072895. [5] HU Jiangfeng, YIN Haifan, and BJÖRNSON E. MmWave MIMO communication with semi-passive RIS: A low-complexity channel estimation scheme[C]. 2021 IEEE Global Communications Conference (GLOBECOM), Madrid, Spain, 2021: 01–06. doi: 10.1109/GLOBECOM46510.2021.9685434. [6] JIN Yu, ZHANG Jiayi, ZHANG Xiaodan, et al. Channel estimation for semi-passive reconfigurable intelligent surfaces with enhanced deep residual networks[J]. IEEE Transactions on Vehicular Technology, 2021, 70(10): 11083–11088. doi: 10.1109/TVT.2021.3109937. [7] NING Boyu, CHEN Zhi, CHEN Wenrong, et al. Terahertz multi-user massive MIMO with intelligent reflecting surface: Beam training and hybrid beamforming[J]. IEEE Transactions on Vehicular Technology, 2021, 70(2): 1376–1393. doi: 10.1109/TVT.2021.3052074. [8] WEI Yi, ZHAO Mingmin, ZHAO Minjian, et al. Channel estimation for IRS-aided multiuser communications with reduced error propagation[J]. IEEE Transactions on Wireless Communications, 2022, 21(4): 2725–2741. doi: 10.1109/TWC.2021.3115161. [9] NOH S, SEO K, SUNG Y, et al. Joint direct and indirect channel estimation for RIS-assisted millimeter-wave systems based on array signal processing[J]. IEEE Transactions on Wireless Communications, 2023, 22(11): 8378–8391. doi: 10.1109/TWC.2023.3262492. [10] PENG Zhendong, ZHOU Gui, PAN Cunhua, et al. Channel estimation for RIS-aided multi-user mmWave systems with uniform planar arrays[J]. IEEE Transactions on Communications, 2022, 70(12): 8105–8122. doi: 10.1109/TCOMM.2022.3214892. [11] LIU Yushan, ZHANG Shun, GAO Feifei, et al. Cascaded channel estimation for RIS assisted mmWave MIMO transmissions[J]. IEEE Wireless Communications Letters, 2021, 10(9): 2065–2069. doi: 10.1109/LWC.2021.3092147. [12] ZHANG Xinyu, JIANG Weidong, HUO Kai, et al. Robust adaptive beamforming based on linearly modified atomic-norm minimization with target contaminated data[J]. IEEE Transactions on Signal Processing, 2020, 68: 5138–5151. doi: 10.1109/TSP.2020.3021257. [13] KUSANO T, YATABE K, and OIKAWA Y. Sparse time-frequency representation via atomic norm minimization[C]. 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, Canada, 2021: 5075–5079. doi: 10.1109/ICASSP39728.2021.9414921. [14] YANG Zai, XIE Lihua, and STOICA P. Vandermonde decomposition of multilevel toeplitz matrices with application to multidimensional super-resolution[J]. IEEE Transactions on Information Theory, 2016, 62(6): 3685–3701. doi: 10.1109/TIT.2016.2553041. [15] CHEN Peng, CHEN Zhimin, MIAO Pu, et al. RIS-ADMM: An ADMM-based passive and sparse sensing method with interference removal[J]. arXiv preprint arXiv: 2206.06172, 2022. [16] SONG Haobo, ZHANG Mianyi, GAO Jiabao, et al. Unsupervised learning-based joint active and passive beamforming design for reconfigurable intelligent surfaces aided wireless networks[J]. IEEE Communications Letters, 2021, 25(3): 892–896. doi: 10.1109/LCOMM.2020.3041510. [17] YU Wentao, SHEN Yifei, HE Hengtao, et al. An adaptive and robust deep learning framework for THz ultra-massive MIMO channel estimation[J]. IEEE Journal of Selected Topics in Signal Processing, 2023, 17(4): 761–776. doi: 10.1109/JSTSP.2023.3282832. [18] WANG Peilan, FANG Jun, DUAN Huiping, et al. Compressed channel estimation for intelligent reflecting surface-assisted millimeter wave systems[J]. IEEE Signal Processing Letters, 2020, 27: 905–909. doi: 10.1109/LSP.2020.2998357. [19] DE ARAÚJO G T and DE ALMEIDA A L F. PARAFAC-based channel estimation for intelligent reflective surface assisted MIMO system[C]. 2020 IEEE 11th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hangzhou, China, 2020: 1–5. doi: 10.1109/SAM48682.2020.9104260. [20] WANG Zhaorui, LIU Liang, and CUI Shuguang. Channel estimation for intelligent reflecting surface assisted multiuser communications: Framework, algorithms, and analysis[J]. IEEE Transactions on Wireless Communications, 2020, 19(10): 6607–6620. doi: 10.1109/TWC.2020.3004330. [21] XIE Wenwu, XIAO Jian, ZHU Peng, et al. Multi-task learning-based channel estimation for RIS assisted multi-user communication systems[J]. IEEE Communications Letters, 2022, 26(3): 577–581. doi: 10.1109/LCOMM.2021.3138082. -

 下载:
下载:




图(7) / 表(3)
计量
- 文章访问数: 950
- HTML全文浏览量: 593
- PDF下载量: 73
- 被引次数: 0
