

Key Technologies and Development Trends of Free Space Optical UAV Communication Network
-
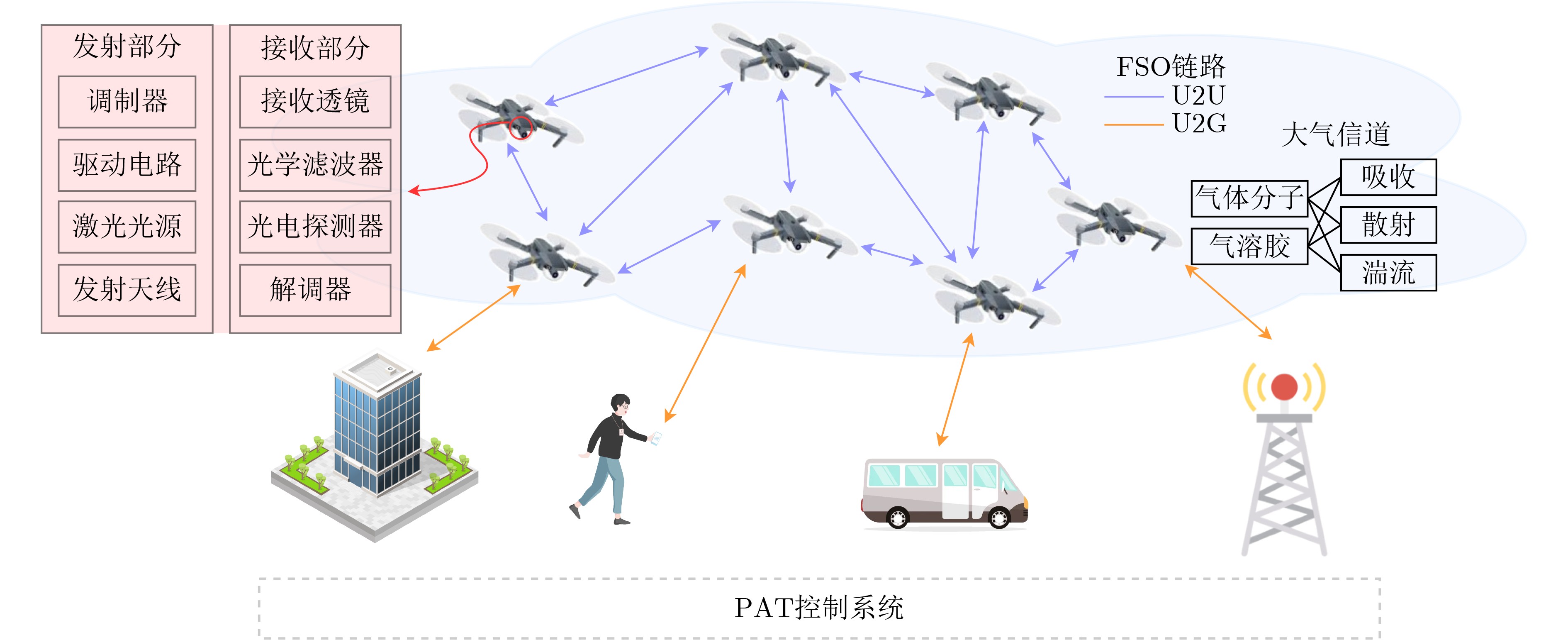
摘要: 在当前电磁频谱拥堵和无线电干扰严重的情况下,基于自由空间光(FSO)的无人机(UAV)通信网络作为推进空天地一体化进程的重要一环,得到了学术界和工业界的广泛关注。与传统射频通信相比,FSO通信具有高数据传输速率、低时延和高安全性等优势。然而,FSO链路易受大气信道条件影响,同时UAV高移动性、网络高动态性以及机载资源的有限性给FSO的稳定连接与可靠通信带来了巨大挑战。因此,该文在介绍了FSO传输特性的基础上,着重分析了提升基于FSO的UAV通信网络稳定性与通信质量的关键技术,在此基础上,归纳出高可靠、强智能、长续航的发展趋势,以期为基于FSO的UAV通信网络发展提供参考与借鉴。Abstract: Considering the electromagnetic spectrum congestion and serious interference, the Free Space Optical (FSO)-based Unmanned Aerial Vehicle (UAV) communication network constitutes an important part for the space-air-ground integration, attracting substantial attention from both academia and industry. Compared to radio frequency communication, FSO communication is benefited from high data rate, low latency and high security. However, the FSO link is susceptible to atmospheric environment, while the mobile UAV dynamics topology and limited resources bring further challenges. Therefore, this paper first introduces the FSO transmission characteristics and then focuses on the key technologies to enhance stability and quality of FSO-based UAV networks. Furthermore, the development trend of FSO-based UAV network, in terms of high reliability, strong intelligence and long endurance is analyzed.
-
表 2 大气粒子散射过程表
类型 半径(μm) 散射过程 空气分子 0.0001 瑞利 雾霾粒子 0.01~1.00 瑞利-米氏 雾滴 1~20 三重几何 雨 100~10000 几何 雪 1000~5000 几何 冰雹 5000~50000 几何  下载: 导出CSV
下载: 导出CSV
表 3 大气湍流类型
条件 类型 特点 漩涡尺度大于发射机光束大小 光束漂移 漩涡以随机方式从原始路径整体偏转光束,导致指向误差,光束错开接收机区域。 漩涡尺度等于发射机光束大小 光束闪烁 漩涡起到透镜作用,使入射光束聚焦并导致接收机处的光辐射照度波动。 漩涡尺度小于发射机光束大小 光束扩散 光束的一小部分被独立衍射和散射,导致接收功率密度降低以及接收光束的波前扭曲。
下载: 导出CSV
-
[1] GUO Wenjng, ZHAN Yueying, TSIFTSIS T A, et al. Performance and channel modeling optimization for hovering UAV-assisted FSO links[J]. Journal of Lightwave Technology, 2022, 40(15): 4999–5012. doi: 10.1109/JLT.2022.3176352. [2] SINGH D and SWAMINATHAN R. Comprehensive performance analysis of hovering UAV-based FSO communication system[J]. IEEE Photonics Journal, 2022, 14(5): 7352013. doi: 10.1109/JPHOT.2022.3205704. [3] JANJI S, SAMORZEWSKI A, WASILEWSKA M, et al. On the placement and sustainability of drone FSO backhaul relays[J]. IEEE Wireless Communications Letters, 2022, 11(8): 1723–1727. doi: 10.1109/LWC.2022.3178546. [4] CHLESTIL C, LEITGEB E, SCHMITT N P, et al. Reliable optical wireless links within UAV swarms[C]. Proceedings of 2006 International Conference on Transparent Optical Networks, Nottingham, UK, 2006: 39–42. doi: 10.1109/ICTON.2006.248491. [5] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933. [6] SHAKHATREH H, SAWALMEH A H, AL-FUQAHA A, et al. Unmanned Aerial Vehicles (UAVs): A survey on civil applications and key research challenges[J]. IEEE Access, 2019, 7: 48572–48634. doi: 10.1109/ACCESS.2019.2909530. [7] XU Guanjun, ZHANG Ning, XU Maozhe, et al. Outage probability and average BER of UAV-assisted dual-hop FSO communication with amplify-and-forward relaying[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8287–8302. doi: 10.1109/TVT.2023.3252822. [8] LI Jia, LIU Jingchong, LU Qi, et al. Optical communication using subcarrier PSK intensity modulation through atmospheric turbulence channels[J]. IEEE Transactions on Communications, 2007, 55(6): 1267. doi: 10.1109/TCOMM.2007.901509. [9] CHOI M, SONG S, KO D E, et al. Trajectory optimization for FSO based U-IoT backhaul networks[J]. IEEE Transactions on Network Science and Engineering, 2023, 10(4): 2030–2044. doi: 10.1109/TNSE.2023.3239060. [10] BASHIR M S and ALOUINI M S. Energy optimization of a laser-powered hovering-UAV relay in optical wireless backhaul[J]. IEEE Transactions on Wireless Communications, 2023, 22(5): 3216–3230. doi: 10.1109/TWC.2022.3216797. [11] SAXENA P and CHUNG Y H. Analysis of jamming effects in IRS assisted UAV dual-hop FSO communication systems[J]. IEEE Transactions on Vehicular Technology, 2023, 72(7): 8956–8971. doi: 10.1109/TVT.2023.3246817. [12] BORAH D K and VOELZ D G. Pointing error effects on free-space optical communication links in the presence of atmospheric turbulence[J]. Journal of Lightwave Technology, 2009, 27(18): 3965–3973. doi: 10.1109/JLT.2009.2022771. [13] MAI V V and KIM H. Beam size optimization and adaptation for high-altitude airborne free-space optical communication systems[J]. IEEE Photonics Journal, 2019, 11(2): 7902213. doi: 10.1109/JPHOT.2019.2901952. [14] DABIRI M T, SADOUGH S M S, and KHALIGHI M A. Channel modeling and parameter optimization for hovering UAV-based free-space optical links[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 2104–2113. doi: 10.1109/JSAC.2018.2864416. [15] MA Yang, WANG Jinyuan, WANG Junbo, et al. Outage performance analysis and parameter optimization of hovering UAV-based FSO system[C]. 2020 IEEE International Conference on Communications, Dublin, Ireland, 2020: 1–6. doi: 10.1109/ICC40277.2020.9149422. [16] DABIRI M T, KHANKALANTARY S, PIRAN M J, et al. UAV-assisted free space optical communication system with amplify-and-forward relaying[J]. IEEE Transactions on Vehicular Technology, 2021, 70(9): 8926–8936. doi: 10.1109/TVT.2021.3098389. [17] LIANG Jingyuan, CHEN Ruidong, YAO Haifeng, et al. Research progress of acquisition, pointing and tracking in optical wireless communication system[J]. Opto-Electronic Engineering, 2022, 49(8): 210439. doi: 10.12086/oee.2022.210439. [18] ABDELFATAH R, ALSHAER N, and ISMAIL T. A review on pointing, acquisition, and tracking approaches in UAV-based fso communication systems[J]. Optical and Quantum Electronics, 2022, 54(9): 571. doi: 10.1007/s11082-022-03968-2. [19] SUN Xiang, ZHANG Tianrun, SHAO Sihua, et al. Low cost ATP system design for free space optics based drone assisted wireless networks[C]. 2022 IEEE Globecom Workshops, Rio de Janeiro, Brazil, 2022: 891–896. doi: 10.1109/GCWkshps56602.2022.10008619. [20] PARK S, YEO C I, HEO Y S, et al. Tracking efficiency improvement according to incident beam size in QPD-based PAT system for common path-based full-duplex FSO terminals[J]. Sensors, 2022, 22(20): 7770. doi: 10.3390/s22207770. [21] JAHID A, ALSHARIF M H, and HALL T J. A contemporary survey on free space optical communication: Potentials, technical challenges, recent advances and research direction[J]. Journal of Network and Computer Applications, 2022, 200: 103311. doi: 10.1016/j.jnca.2021.103311. [22] BAYAKI E, SCHOBER R, and MALLIK R K. Performance analysis of MIMO free-space optical systems in gamma-gamma fading[J]. IEEE Transactions on Communications, 2009, 57(11): 3415–3424. doi: 10.1109/TCOMM.2009.11.080 168. [23] SINGH P K, SINGH Y, KOLEKAR M H, et al. Recent Innovations in Computing: Proceedings of ICRIC 2020: Vol. 701[M]. Singapore: Springer, 2021: 73–84. doi: 10.1007/978-981-15-8297-4. [24] HASAN S M A, AHMED S, and NAZRUL ISLAM A K M. Simulation of a massive MIMO FSO system under atmospheric turbulence[C]. The 5th International Conference on Electrical Engineering and Information Communication Technology, Dhaka, Bangladesh, 2021: 1–6. doi: 10.1109/ICEEICT53905.2021.9667905. [25] MICHAILIDIS E T, BITHAS P S, NOMIKOS N, et al. Outage probability analysis in multi-user FSO/RF and UAV-enabled MIMO communication networks[J]. Physical Communication, 2021, 49: 101475. doi: 10.1016/j.phycom.2021.101475. [26] NADEEM F, KVICERA V, AWAN M, et al. Weather effects on hybrid FSO/RF communication link[J]. IEEE Journal on Selected Areas in Communications, 2009, 27(9): 1687–1697. doi: 10.1109/JSAC.2009.091218. [27] NAFEES M, HUANG S J, THOMPSON J, et al. Backhaul-aware user association and throughput maximization in UAV-aided hybrid FSO/RF network[J]. Drones, 2023, 7(2): 74. doi: 10.3390/drones7020074. [28] YAHIA O B, ERDOGAN E, KURT G K, et al. A weather-dependent hybrid RF/FSO satellite communication for improved power efficiency[J]. IEEE Wireless Communications Letters, 2022, 11(3): 573–577. doi: 10.1109/LWC.2021.3136444. [29] KONG Huaicong, LIN Min, ZHANG Jian, et al. Ergodic sum rate for uplink NOMA transmission in satellite-aerial-ground integrated networks[J]. Chinese Journal of Aeronautics, 2022, 35(9): 58–70. doi: 10.1016/j.cja.2021.10.039. [30] GUO Zinan, GAO Wei, YE Haijun, et al. A location-aware resource optimization for maximizing throughput of emergency outdoor–indoor UAV communication with FSO/RF[J]. Sensors, 2023, 23(5): 2541. doi: 10.3390/s23052541. [31] LEE J H, PARK K H, KO Y C, et al. Throughput maximization of mixed FSO/RF UAV-aided mobile relaying with a buffer[J]. IEEE Transactions on Wireless Communications, 2021, 20(1): 683–694. doi: 10.1109/TWC.2020.3028068. [32] LU Rongrong, MA Yang, LIN Shenghong, et al. Energy-efficient trajectory optimization for UAV-based hybrid FSO/RF communications with buffer constraints[J]. Entropy, 2021, 23(12): 1596. doi: 10.3390/e23121596. [33] LAPČÁK M, OVSENÍK L, ORAVEC J, et al. Investigation of machine learning methods for prediction of measured values of atmospheric channel for hybrid FSO/RF system[J]. Photonics, 2022, 9(8): 524. doi: 10.3390/photonics 9080524. [34] ZHU Pengfei, ZHANG Jiawei, GAO Zhengguang, et al. Adaptive resource allocation in FSO/RF multiuser system with proportional fairness for UAV application[J]. Optical Switching and Networking, 2019, 33: 41–48. doi: 10.1016/j.osn.2018.12.003. [35] FAWAZ W, ABOU-RJEILY C, and ASSI C. UAV-aided cooperation for FSO communication systems[J]. IEEE Communications Magazine, 2018, 56(1): 70–75. doi: 10.1109/MCOM.2017.1700320. [36] DABIRI M T and SADOUGH S M S. Optimal placement of UAV-assisted free-space optical communication systems with DF relaying[J]. IEEE Communications Letters, 2020, 24(1): 155–158. doi: 10.1109/LCOMM.2019.2949274. [37] JIANG Xu, WU Zhliu, YIN Zhendong, et al. Power and trajectory optimization for UAV-enabled amplify-and-forward relay networks[J]. IEEE Access, 2018, 6: 48688–48696. doi: 10.1109/ACCESS.2018.2867849. [38] SONG S, CHOI M, KO D E, et al. Multi-UAV trajectory optimization considering collisions in FSO communication networks[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3378–3394. doi: 10.1109/JSAC.2021.3088665. [39] LEE J H, PARK K H, KO Y C, et al. A UAV-mounted free space optical communication: Trajectory optimization for flight time[J]. IEEE Transactions on Wireless Communications, 2020, 19(3): 1610–1621. doi: 10.1109/TWC.2019.2955475. [40] AJAM H, NAJAFI M, JAMALI V, et al. Ergodic sum rate analysis of UAV-based relay networks with mixed RF-FSO channels[J]. IEEE Open Journal of the Communications Society, 2020, 1: 164–178. doi: 10.1109/OJCOMS.2020.2969492. [41] ABOU-RJEILY C and FAWAZ W. Buffer-aided relaying protocols for cooperative FSO communications[J]. IEEE Transactions on Wireless Communications, 2017, 16(12): 8205–8219. doi: 10.1109/TWC.2017.2759107. [42] AL-ERYANI Y F, SALHAB A M, ZUMMO S A, et al. Protocol design and performance analysis of multiuser mixed RF and hybrid FSO/RF relaying with buffers[J]. Journal of Optical Communications and Networking, 2018, 10(4): 309–321. doi: 10.1364/JOCN.10.000309. [43] NAJAFI M, JAMALI V, and SCHOBER R. Optimal relay selection for the parallel hybrid RF/FSO relay channel: Non-buffer-aided and buffer-aided designs[J]. IEEE Transactions on Communications, 2017, 65(7): 2794–2810. doi: 10.1109/TCOMM.2017.2686868. -

 下载:
下载:


图(6) / 表(4)
计量
- 文章访问数: 1913
- HTML全文浏览量: 2680
- PDF下载量: 323
- 被引次数: 0
