

Maximum Likelihood Estimation of Ocean Wind Vector Using Subsatellite-Observation Spaceborne Global Navigation Satellite System-Reflectometry
-
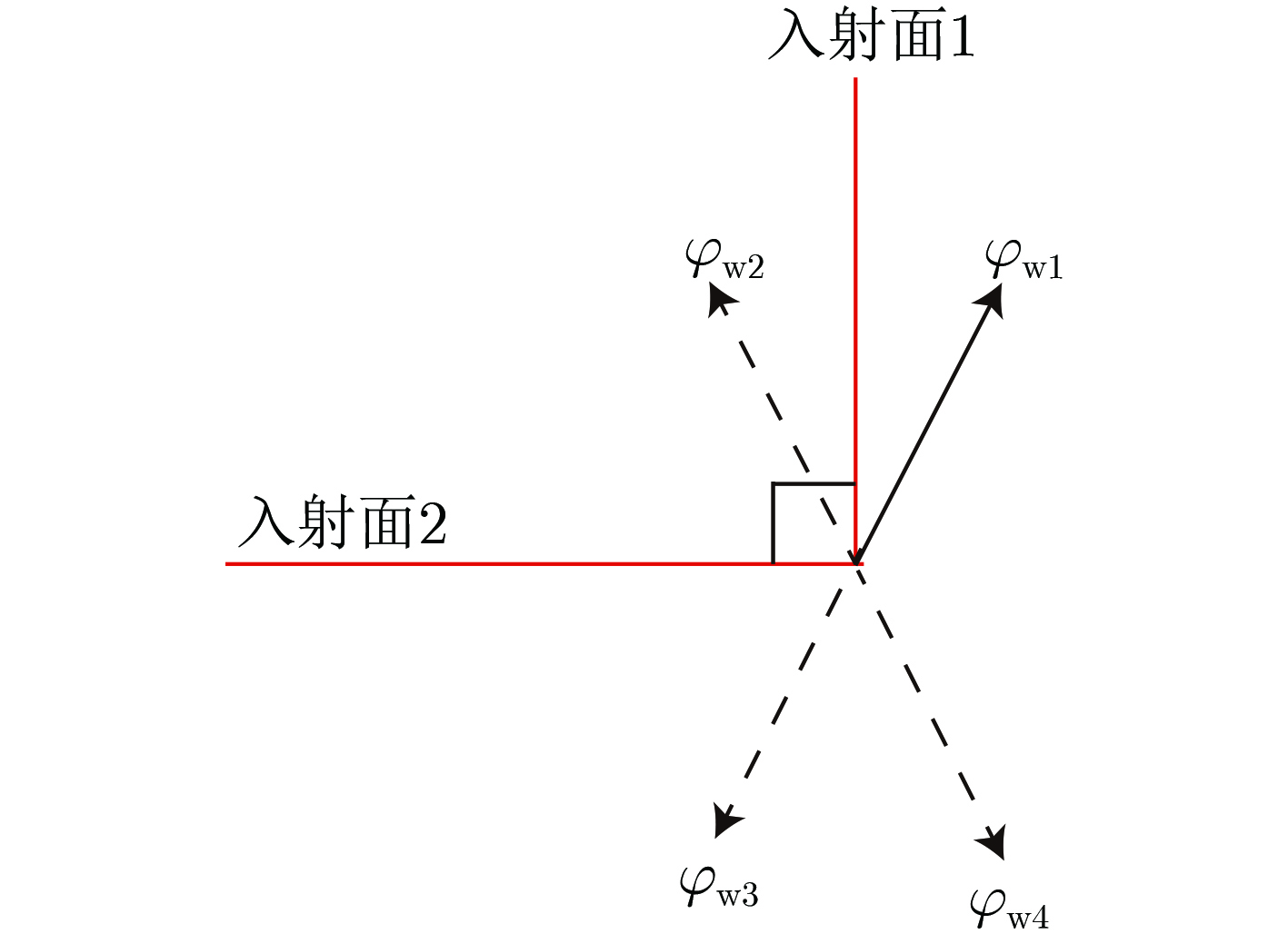
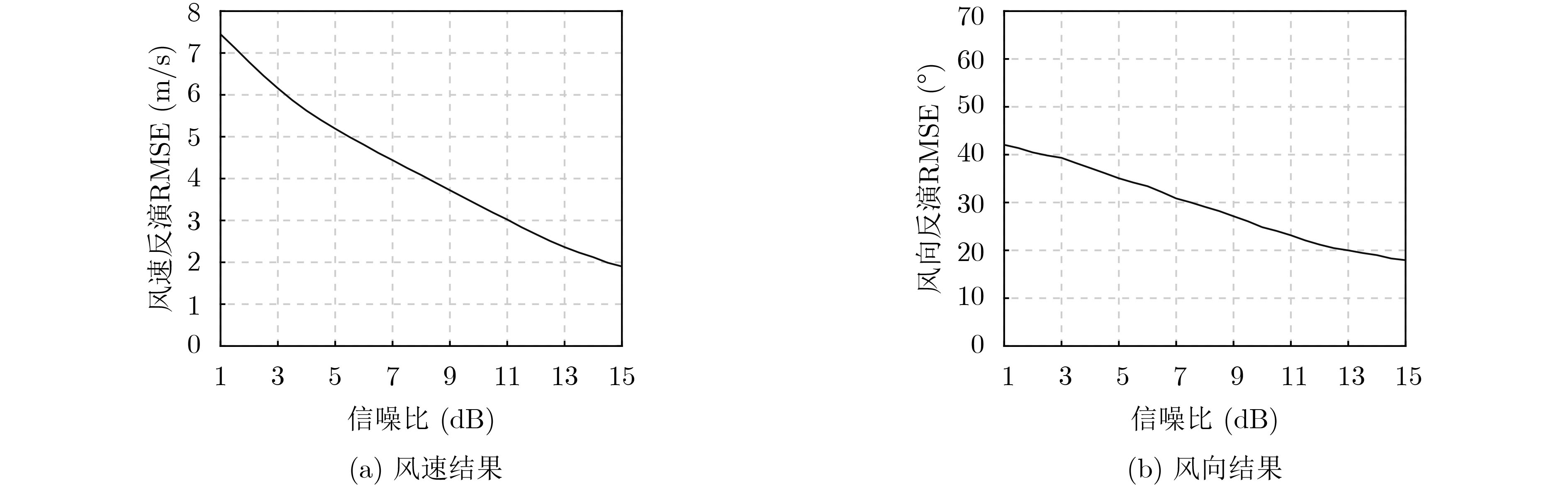
摘要: 该文针对星载全球导航卫星反射计(GNSS-R)镜面反射信号对海面风向不敏感导致海面风向反演难问题,分析非镜向海面散射信号特征,提出星下点非镜向观测模式,定义该模式下海面风矢量敏感特征观测量,在此基础上提出基于星载GNSS-R海面风矢量极大似然估计(MLE)反演算法直接利用两颗及以上导航卫星的星下点非镜向散射信号进行海面风矢量的反演,并提出风矢量搜索算法提高反演效率。通过搭建星载GNSS-R仿真平台验证算法的可行性和评估算法性能。结果表明:所提算法可直接利用非镜向独立观测模式下的多颗导航卫星散射信号反演得到海面风速和风向;多星观测可消除观测几何导致的模糊解从而将海风风向4个模糊解降至2个模糊解,但无法消除海浪谱的对称性导致的海面风向模糊解。在2~25 m/s的风速内,当信噪比(SNR)大于11 dB时,3星观测的风速均方根误差(RMSE)优于2 m/s,风向的均方根误差优于15°。
-
关键词:
- 全球导航卫星系统反射计 /
- 极大似然估计 /
- 海面风矢量 /
- 遥感
Abstract: It is difficult to retrieve the ocean wind direction using the specular reflection signal owing to its insensitivity to the sea surface wind direction. The sensitivity of the scattered Global Navigation Satellite System-Reflectometry (GNSS-R) signal from the non-specular geometry to wind direction is first investigated in this paper. The sub-satellite non-specular observation mode is proposed, and the observable quanitity sensitive to wind direction in this mode is defined. Based on this mode, the wind vector retrieval algorithm using spaceborne GNSS-R based on the Maximum Likelihood Estimation (MLE) is presented, in which the sub-satellite non-specular scattering signals from two and more navigation satellites are used to retrieve ocean wind vector. A simulator is developed to demonstrate and test the proposed algorithm. The results show that due to the ambiguity of the observation geometry and the symmetry of the ocean spectrum, there are four uncertain solutions in the retrieved wind directions. The ambiguity of the measurement geometry can be eliminated by using the multi-satellite observation, and only two possible solutions of wind directions still are remained. When the scattered signals from three satellites are used, and the Signal-to-Noise Ratio (SNR) is over 11 dB, the Root Mean Square Error (RMSE) of the retrieved wind speed and direction are less 2 m/s and 15° with a wind speed rang of 2~25 m/s. -
表 1 星下点非镜向配置参数表
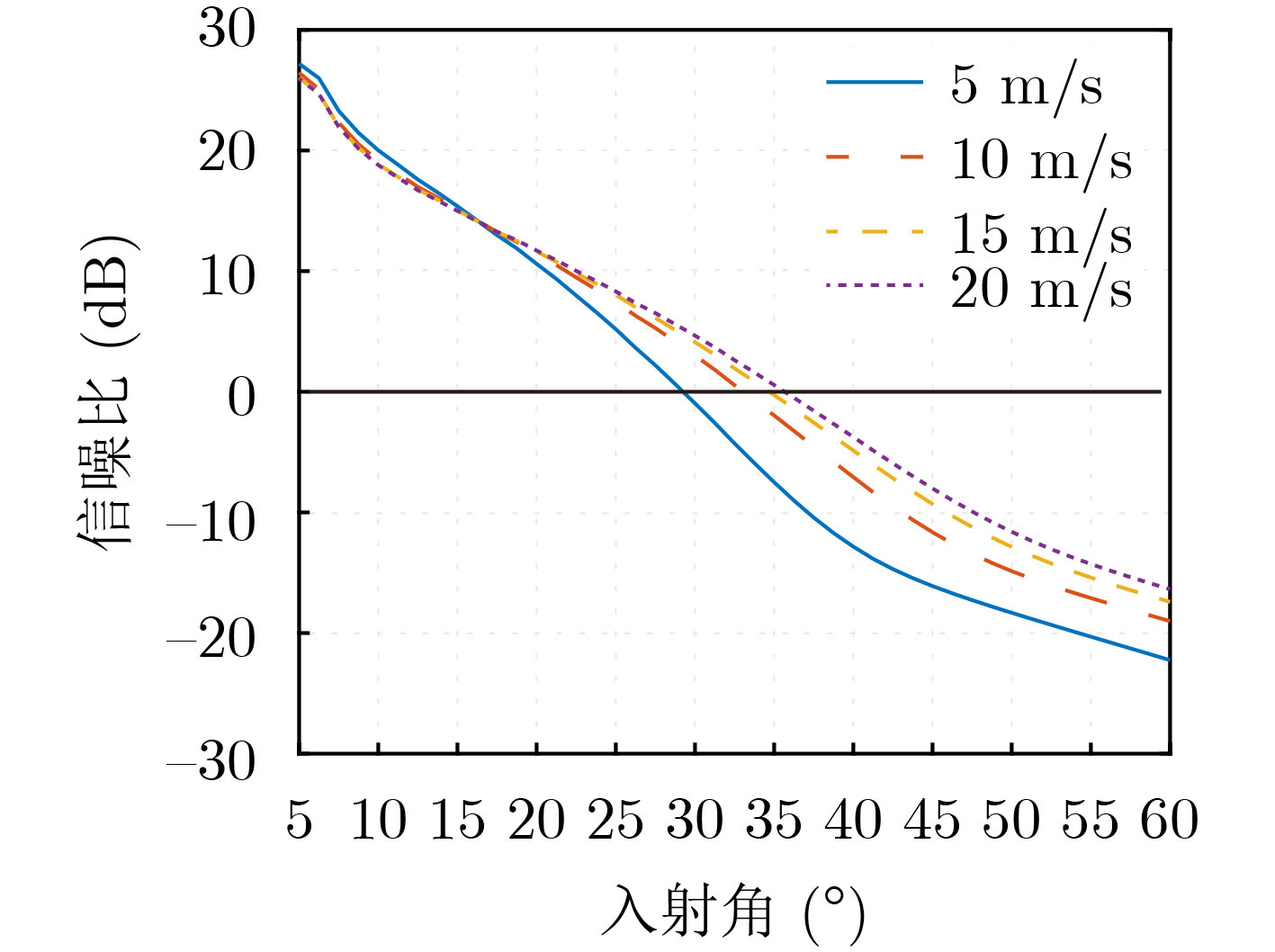
符号 参数 值 $ {P_{\text{t}}} $ 发射信号功率 26.8 W $ {G_{\text{t}}} $ 发射天线增益 12.1 dB $ {h_{\text{t}}} $ 发射机高度 20 200 km $ {h_{\text{r}}} $ 接收机高度 510 km $ {G_{\text{r}}} $ 接收天线增益 12.1 dB $ {T_{{\text{coh}}}} $ 相干积分时间 1 ms $ {N_{{\text{incoh}}}} $ 非相干累加次数 1 000 ${D_{\text{c}}}$ 检测因子 26.3 $ {f_{\text{B}}} $ 接收机带宽 2.5 MHz ${T_{{\text{eff}}}}$ 等效温度 25°C ${\theta _{\text{i}}}$ 入射角 [0,90°] $ {\varphi _{\text{w}}} $ 风向 90° $ {u_{10}} $ 风速 5~20 m/s  下载: 导出CSV
下载: 导出CSV
-
[1] 侯一筠, 尹宝树, 管长龙, 等. 我国海洋动力灾害研究进展与展望[J]. 海洋与湖沼, 2020, 51(4): 759–767. doi: 10.11693/hyhz20200100029.HOU Yijun, YIN Baoshu, GUAN Changlong, et al. Progress and prospect in research on marine dynamic disasters in China[J]. Oceanologia et Limnologia Sinica, 2020, 51(4): 759–767. doi: 10.11693/hyhz20200100029. [2] 自然资源部, 海洋预警监测司. 2020年中国海洋灾害公报[R]. 2021.Ministry of Natural Resources and Marine Early Warning and Monitoring Department. Bulletin of China marine disaster 2020[R]. 2021. [3] 自然资源部, 海洋预警监测司. 2019年中国海洋灾害公报[R]. 2020.Ministry of Natural Resources and Marine Early Warning and Monitoring Department. Bulletin of China marine disaster 2019[R]. 2020. [4] 高歌, 黄大鹏, 赵珊珊. 基于信息扩散方法的中国台风灾害年月尺度风险评估[J]. 气象, 2019, 45(11): 1600–1610. doi: 10.7519/j.issn.1000-0526.2019.11.010.GAO Ge, HUANG Dapeng, and ZHAO Shanshan. Annual and monthly risk assessment of typhoon disasters in China based on the information diffusion method[J]. Meteorological Monthly, 2019, 45(11): 1600–1610. doi: 10.7519/j.issn.1000-0526.2019.11.010. [5] 张新蕾. 基于多源遥感数据的北太平洋海面风场研究[D]. [硕士论文], 辽宁师范大学, 2019.ZHANG Xinlei. Research on the sea surface wind field of the North Pacific Ocean based on multi-source remote sensing data[D]. [Master dissertation], Liaoning Normal University, 2019. [6] 林明森, 张有广. 我国海洋动力环境卫星应用现状及发展展望[J]. 卫星应用, 2018(5): 19–23. doi: 10.3969/j.issn.1674-9030.2018.05.006.LIN Mingsen and ZHANG Youguang. Current status and development prospects of marine dynamic environment satellite application in China[J]. Satellite Application, 2018(5): 19–23. doi: 10.3969/j.issn.1674-9030.2018.05.006. [7] 蒋兴伟, 林明森, 张有广. 中国海洋卫星及应用进展[J]. 遥感学报, 2016, 20(5): 1185–1198. doi: 10.11834/jrs.20166153.JIANG Xingwei, LIN Mingsen, and ZHANG Youguang. Progress and prospect of Chinese ocean satellites[J]. Journal of Remote Sensing, 2016, 20(5): 1185–1198. doi: 10.11834/jrs.20166153. [8] HALL C D and CORDEY R A. Multistatic scatterometry[C]. International Geoscience and Remote Sensing Symposium, 'Remote Sensing: Moving Toward the 21st Century', Edinburgh, UK, 1988: 561–562. doi: 10.1109/IGARSS.1988.570200. [9] GUO Wenfei, DU Hao, CHEONG J W, et al. GNSS-R wind speed retrieval of sea surface based on particle swarm optimization algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 4202414. doi: 10.1109/TGRS.2021.3082916. [10] QIN Lingyu and LI Ying. Wind speed retrieval method for shipborne GNSS-R[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 1000205. doi: 10.1109/LGRS.2020.3021506. [11] RAJABI M, HOSEINI M, NAHAVANDCHI H, et al. Polarimetric GNSS-R sea level monitoring using I/Q interference patterns at different antenna configurations and carrier frequencies[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5801613. doi: 10.1109/TGRS.2021.3123146. [12] ZHU Yongchao, TAO Tingye, LI Jiangyang, et al. Spaceborne GNSS-R for sea ice classification using machine learning classifiers[J]. Remote Sensing, 2021, 13(22): 4577. doi: 10.3390/rs13224577. [13] ZHU Y, TAO T, ZOU J, et al. Spaceborne GNSS reflectometry for retrieving sea ice concentration using TDS-1 data[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(4): 612–616. doi: 10.1109/LGRS.2020.2982959. [14] WANG Nazi, GAO Fan. KONG Yahui, et al. Soil moisture estimation based on GNSS-R using L5 signals from a Quasi-Zenith satellite system[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 2505005. doi: 10.1109/LGRS.2022.3176463. [15] RUF C S, GLEASON S, JELENAK Z, et al. The CYGNSS nanosatellite constellation hurricane mission[C]. 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 214–216. doi: 10.1109/IGARSS.2012.6351600. [16] GUO Zhizhou, LIU Baojian, WAN Wei, et al. Soil moisture retrieval using BuFeng-1 A/B based on land surface clustering algorithm[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 4680–4689. doi: 10.1109/JSTARS.2022.3179325. [17] YANG Guanglin, BAI Weihua, WANG Jinsong, et al. FY3E GNOS II GNSS reflectometry: Mission review and first results[J]. Remote Sensing, 2022, 14(4): 988. doi: 10.3390/rs14040988. [18] ZUFFADA C, ELFOUHAILY T, and LOWE S. Sensitivity analysis of wind vector measurements from ocean reflected GPS signals[J]. Remote Sensing of Environment, 2003, 88(3): 341–350. doi: 10.1016/S0034-4257(03)00175-5. [19] GARRISON J L. Anisotropy in reflected GPS measurements of ocean winds[C]. 2003 IEEE International Geoscience and Remote Sensing Symposium. Proceedings (IEEE Cat. No. 03CH37477), Toulouse, France, 2003: 4480–4482. doi: 10.1109/IGARSS.2003.1295553. [20] VALENCIA E, ZAVOROTNY V U, AKOS D M, et al. Using DDM asymmetry metrics for wind direction retrieval from GPS ocean-scattered signals in airborne experiments[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(7): 3924–3936. doi: 10.1109/TGRS.2013.2278151. [21] GUAN Dongliang, PARK H, CAMPS A, et al. Wind direction signatures in GNSS-R observables from space[J]. Remote Sensing, 2018, 10(2): 198. doi: 10.3390/rs10020198. [22] WANG Feng, YANG Dongkai, and YANG Lei. Feasibility of wind direction observation using low-altitude global navigation satellite system-reflectometry[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(12): 5063–5075. doi: 10.1109/JSTARS.2018.2877388. [23] ZHANG Guodong, YANG Dongkai, YU Yongqing, et al. Wind direction retrieval using spaceborne GNSS-R in nonspecular geometry[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 649–658. doi: 10.1109/JSTARS.2020.2970106. [24] KING L S, UNWIN M, RAWLINSON J, et al. Processing of raw GNSS reflectometry data from TDS-1 in a backscattering configuration[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 2916–2924. doi: 10.1109/JSTARS.2020.2997199. [25] RICHARDS M A. Fundamentals of Radar Signal Processing[M]. New York: McGraw-Hill Education, 2014: 55. [26] ALONSO-ARROYO A, QUEROL J, LOPEZ-MARTINEZ C, et al. SNR and standard deviation of cGNSS-R and iGNSS-R scatterometric measurements[J]. Sensors, 2017, 17(1): 183. doi: 10.3390/s17010183. [27] 解学通, 方裕, 陈晓翔, 等. 基于最大似然估计的海面风场反演算法研究[J]. 地理与地理信息科学, 2005, 21(1): 30–33. doi: 10.3969/j.issn.1672-0504.2005.01.009.XIE Xuetong, FANG Yu. CHEN Xiaoxiang, et al. Research on Numerical wind vector retrieval algorithm based on maximum likelihood estimation[J]. Geography and Geo-Information Science, 2005, 21(1): 30–33. doi: 10.3969/j.issn.1672-0504.2005.01.009. -


 下载:
下载:







图(13) / 表(1)
计量
- 文章访问数: 794
- HTML全文浏览量: 576
- PDF下载量: 52
- 被引次数: 0
