

3D Trajectory and Power Optimization Method Based on Full Spectrum Sharing
-
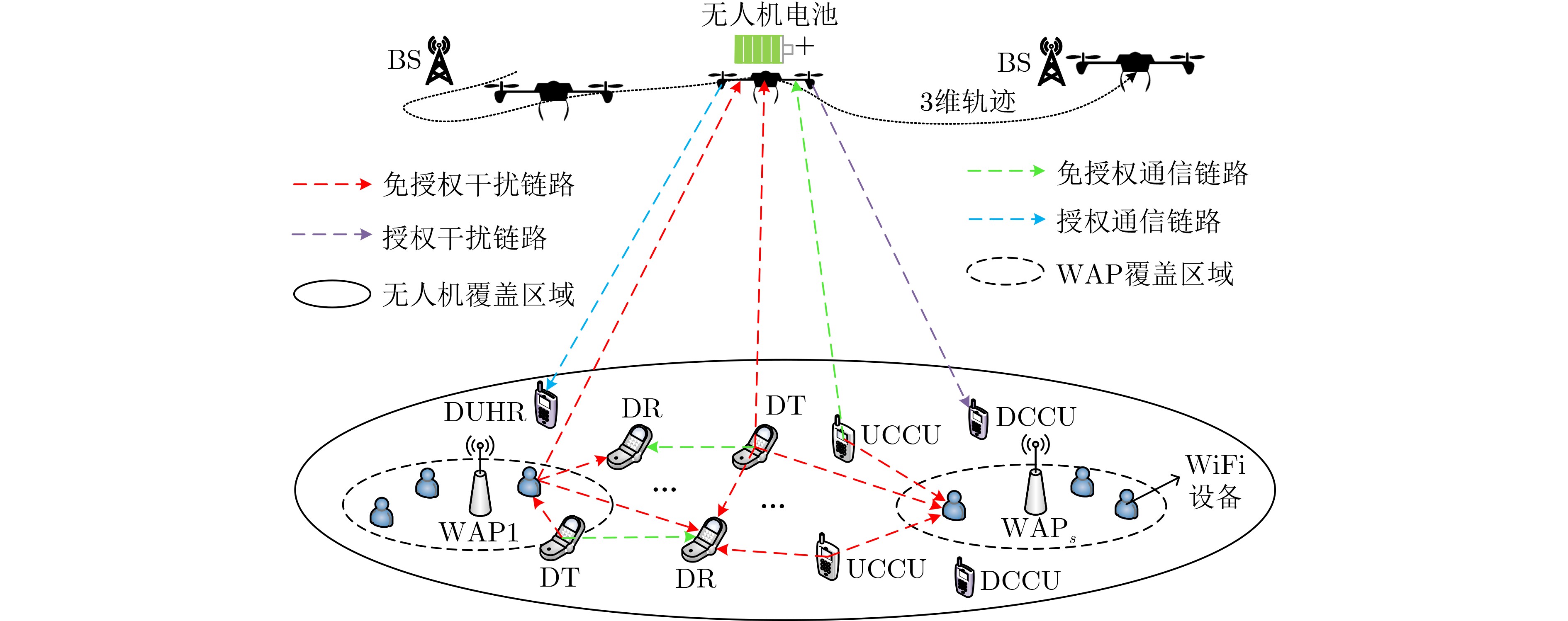
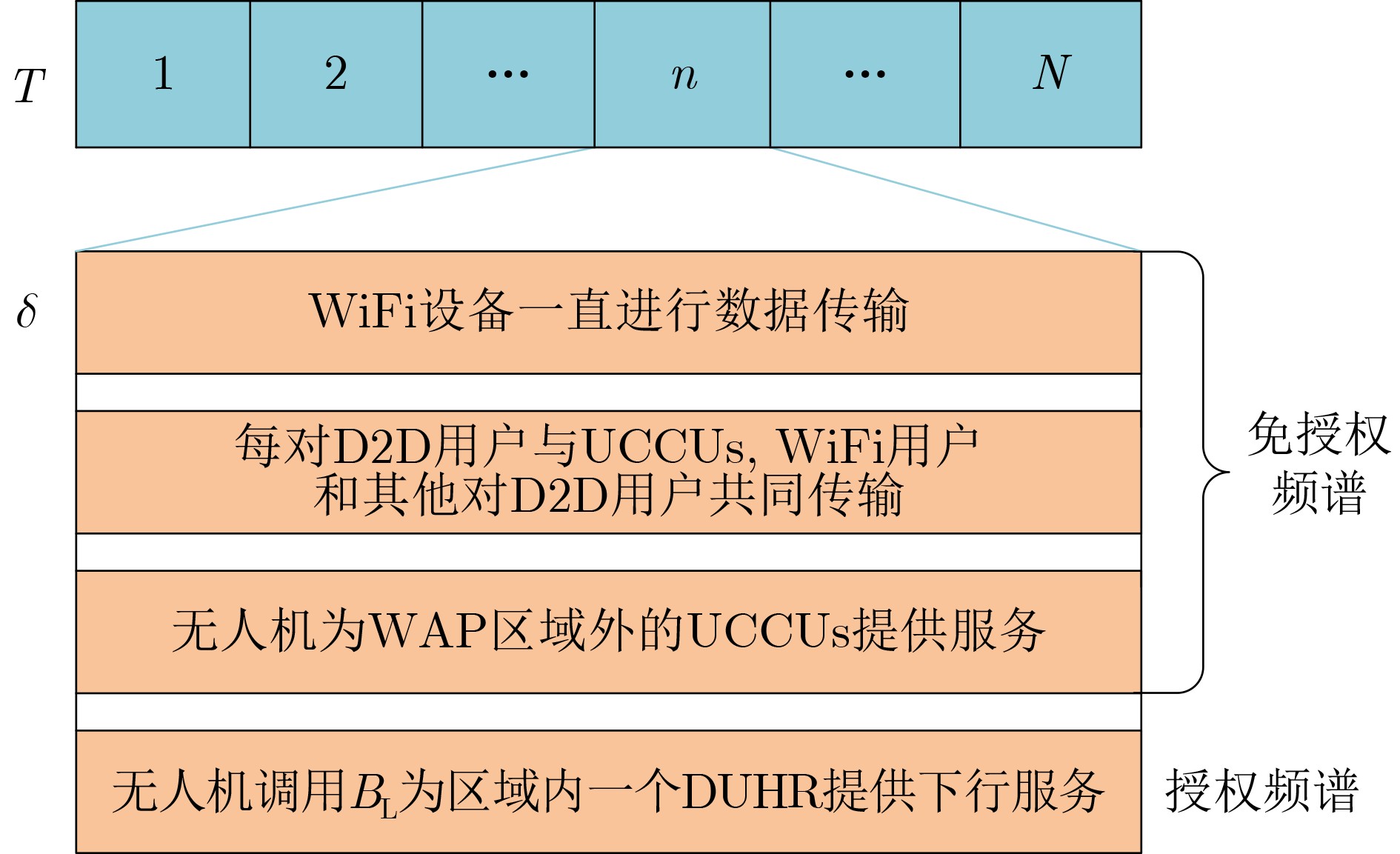
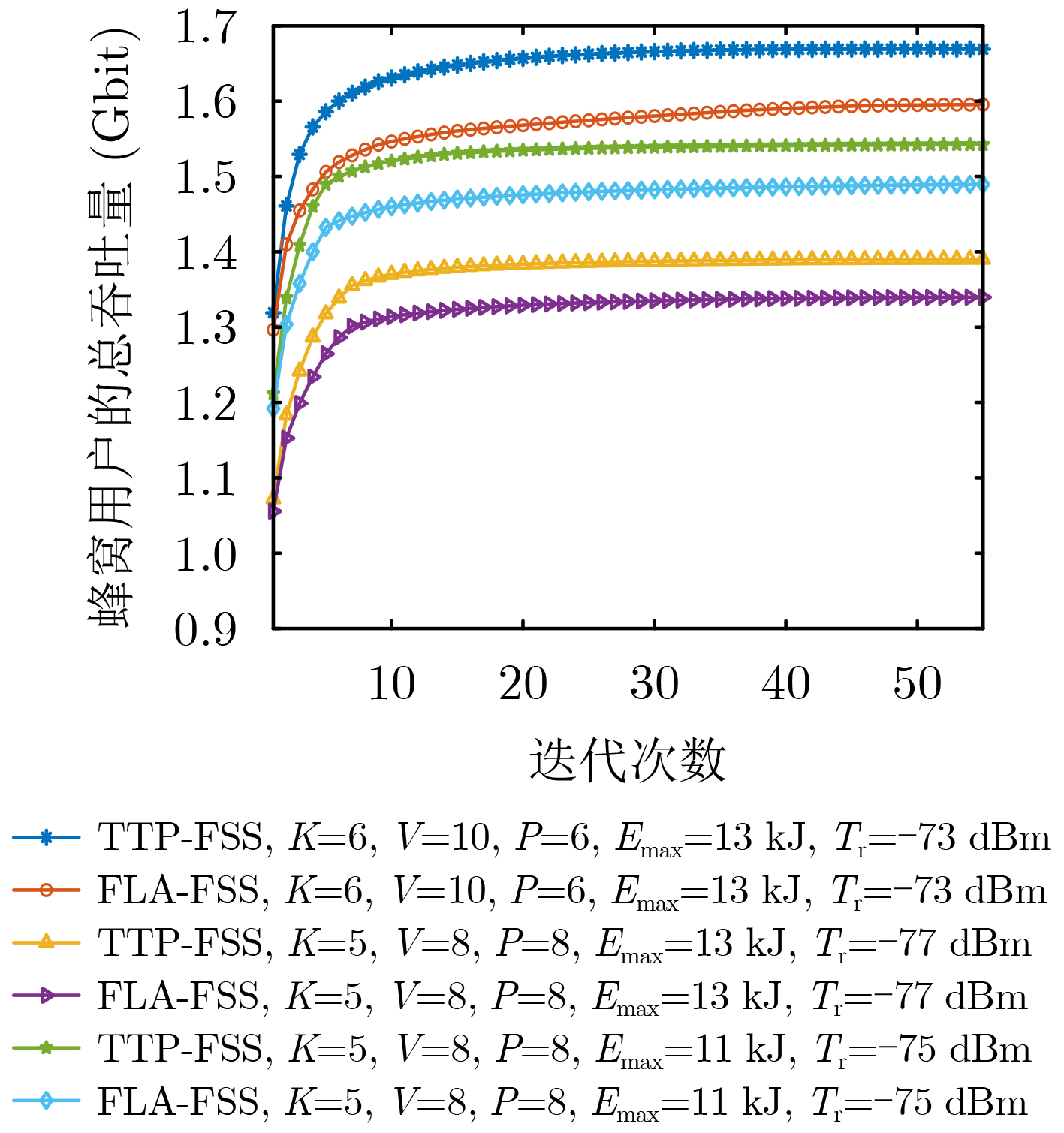
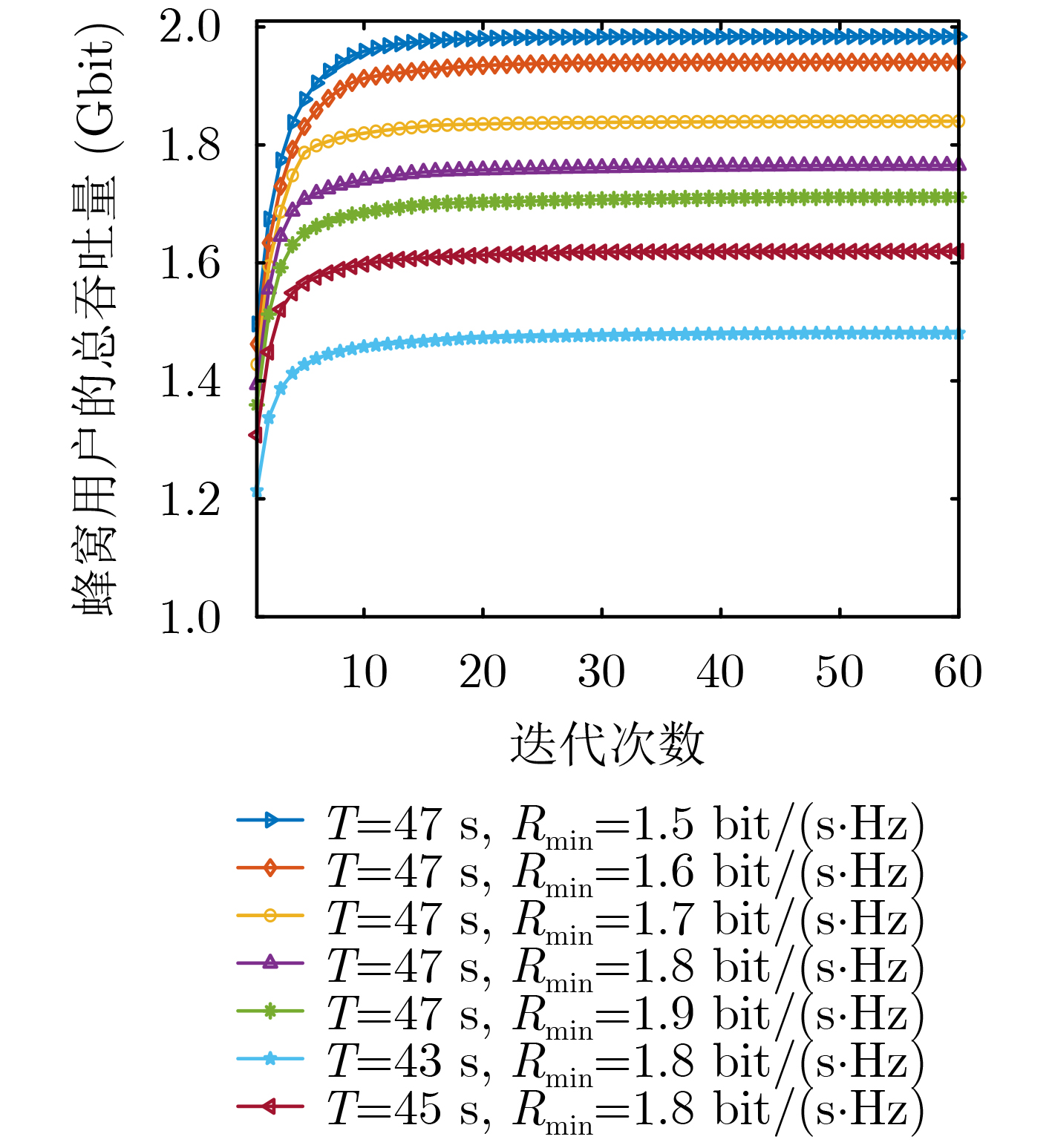
摘要: 当前蜂窝系统频谱资源极度短缺,免授权频谱因而被建议在蜂窝系统中使用。无人机(UAV)的飞行轨迹和功率控制对频谱利用效率有重大影响。然而,基于频谱共享的3维轨迹和功率优化方法却鲜少研究。为此,该文首先提出一种全频谱共享方法,即无人机通过控制上行蜂窝用户和设备到设备(D2D)用户的发射功率,在不影响WiFi设备正常传输的前提下使用免授权频谱;同时无人机也能够在不影响其他下行蜂窝用户的前提下使用授权频谱。然后基于提出的全频谱共享方法,该文构建了无人机电池能量约束下的3维飞行轨迹和发射功率的联合优化问题。为了求解提出的复杂多变量耦合的非凸优化问题,该文采用块坐标下降和连续凸逼近方法将原问题转化为3维轨迹优化和功率控制两个凸优化子问题并迭代求解。大量仿真结果证明提出的基于3维轨迹和功率优化的全频谱共享方法能够显著提高频谱利用效率。Abstract: Due to the extreme shortage of licensed spectrum in cellular systems currently, unlicensed spectrum is thus recommended for cellular systems. The Unmanned Aerial Vehicle(UAV) flight trajectory and power control have a significant impact on spectrum utilization efficiency. However, Three-Dimensional(3D) flight trajectory and power optimization methods based on full spectrum sharing have rarely been unstudied. Therefore, a full spectrum sharing method is first proposed in this paper, where the UAV can use the unlicensed spectrum by controlling the transmission power of uplink cellular users and Device to Device (D2D) users without affecting the data transmission of WiFi devices; at the same time, the UAV can use the licensed spectrum without affecting other downlink cellular users. And then, based on the proposed full spectrum sharing method, a joint optimization problem of 3D flight trajectory and transmission power is constructed under the energy constraint of the UAV battery. In order to solve the proposed complex non-convex optimization problem with multi-variable coupling, the successive convex approximation technique and block coordinate descent method are used to transform the original problem into two convex optimization subproblems i.e. 3D trajectory optimization and power control and solve them iteratively. A large of simulation results show that the proposed spectrum sharing method based on 3D trajectory and power optimization significantly improves the spectrum utilization efficiency.
-
表 1 关键的符号变量
符号变量 描述 符号变量 描述 符号变量 描述 T 飞行周期 ${E_{\max }}$ 无人机最大能量 ${{\boldsymbol{L}}_{ { \rm{D} }_v^{\text{T} } } }$ DT的位置 N 飞行时隙数 $I_v^{ {\text{WiFi-R} } }$ WiFi对DR总干扰 ${{\boldsymbol{L}}_{ {\text{W} }_l^s} }$ WiFi设备的位置 K UCCUs的个数 ${{\boldsymbol{Q}}_v}[n]$ D2D的吞吐量需求 $ {V_{\text{h}}}[n] $ 3维飞行速度 L WiFi的用户数 ${p_s}$ WiFi的发射功率 $\beta $ 地面路径损耗因子 S WAP的个数 ${{\boldsymbol{L}}_p}$ DCCU p的位置 ${p_k}[n]$ UCCU k的发射功率 P DCCUs的个数 $\sigma _{ \rm{L} }^2$ 总授权干扰功率 $ {Q_k} $ UCCU k的速率需求 V D2D的对数 ${T_{\text{r}}}$ 最大干扰阈值 $I_v^{ {\text{D2D-T} } }[n]$ DT对BS的总干扰 $I_v^{ {\text{CU-R} } }[n]$ UCCU对DR干扰 ${L_{ { { \rm{O} }_k} } }$ UCCUs的位置 $ I_l^{{\text{WiFi}}}[n] $ WiFi对BS的干扰 ${{\boldsymbol{L}}_{ {\text{D} }_v^{\text{R} } } }$ DR的位置 ${p_v}[n]$ DT v的发射功率 ${p_{\text{u}}}[n]$ 无人机的发射功率 ${{\boldsymbol{Q}}_{\text{u} } }[n]$ 无人机的2维坐标 $ I_v^{{\text{D2D}}}[n] $ 其他DT对DR干扰 $H[n]$ 无人机的飞行高度  下载: 导出CSV
下载: 导出CSV
算法1 DAUAV系统中的3维轨迹优化和功率控制算法 (1) 初始化最大误差$\varepsilon $、迭代次数初值i=0、目标函数初值obj、最大迭代次数$\alpha $以及${{\boldsymbol{Z}}^i}\left( n \right) = \left\{ {p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i,{ {\tilde {\boldsymbol{O}}}^i},{\boldsymbol{Q}}_n^i,H_n^i} \right\}$; (2) ${\bf{while} }$ $i < \alpha $ ${\bf{do} }$ (3) $i = i + 1,$ (4) 对于给定的${{\boldsymbol{Z}}^i}\left( n \right)$求解3维轨迹优化子问题P2.1,得到当前解为$\left\{ { {\boldsymbol{Q} }_n^{i + 1},H_n^{i + 1},{ {\tilde {\boldsymbol{A} } }^{i + 1} },{ {\tilde {\boldsymbol{B} } }^{i + 1} },{ {\tilde {\boldsymbol{C} } }^{i + 1} },{ {\tilde {\boldsymbol{O} } }^{i + 1} },\tilde {\boldsymbol{R} }_c^{i + 1},\tilde {\boldsymbol{R} }_k^{i + 1} } \right\}$; (5) 对于给定的$\left\{ {{\boldsymbol{Q}}_n^{i + 1},H_n^{i + 1},p_{k,n}^i,p_{v,n}^i} \right\}$求解功率优化子问题P3.1,得到当前问题解$\left\{ {p_{k,n}^{i + 1},p_{v,n}^{i + 1},p_{{\text{u}},n}^{i + 1}} \right\}$; (6) 执行$\left\{ { {\boldsymbol{Q} }_n^i,H_n^i,p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i,{ {\tilde {\boldsymbol{A} } }^i},{ {\tilde {\boldsymbol{B} } }^i},{ {\tilde {\boldsymbol{C} } }^i},{ {\tilde {\boldsymbol{O} } }^i},\tilde {\boldsymbol{R} }_{\text{c} }^i,\tilde {\boldsymbol{R} }_k^i} \right\} = \left\{ { {\boldsymbol{Q} }_n^{i + 1},H_n^{i + 1},p_{k,n}^{i + 1},p_{v,n}^{i + 1},p_{ {\text{u} },n}^{i + 1},{ {\tilde {\boldsymbol{A} } }^{i + 1} },{ {\tilde {\boldsymbol{B} } }^{i + 1} },{ {\tilde {\boldsymbol{C} } }^{i + 1} },{ {\tilde {\boldsymbol{O} } }^{i + 1} },\tilde {\boldsymbol{R} }_{\text{c} }^{i + 1},\tilde {\boldsymbol{R} }_k^{i + 1} } \right\};$ (7) ${\bf{if } }{\text{ abs} }\left( {L\left( {p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i,{\boldsymbol{Q} }_n^i,H_n^i} \right) - {\rm{obj}}} \right) \le \varepsilon {\text{ } }{\bf{then} }$ break; (8) else ${{\boldsymbol{Z}}^i}\left( n \right) = {{\boldsymbol{Z}}^{i + 1} }\left( n \right)$且${\rm{obj} } = L\left( {p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i,{\boldsymbol{Q}}_n^i,H_n^i} \right)$; (9)end while (10)输出最优参数值为$\left\{ {{\boldsymbol{Q}}_n^i,H_n^i,p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i} \right\}$,计算获得当前最大的总吞吐量为$L\left( {p_{k,n}^i,p_{v,n}^i,p_{ {\text{u} },n}^i,{\boldsymbol{Q}}_n^i,H_n^i} \right)$。
下载: 导出CSV
表 2 部分仿真参数列表
参数 取值 参数 取值 DCCUs的个数P 6/8/10/14 UCCUs的个数K 3~6 WAP的个数$S$ 2~4 飞行时隙数N 30 D2D用户对数V 6~10对 授权频谱带宽${B_{\text{L}}}$ 6 MHz WAP的WiFi用户L 10 最大水平速度 18 m/s 无人机飞行周期T 43~49 s 最大垂直速度 8 m/s 无人机最大能量${E_{\max }}$ 13 kJ UCCUs平均速率$ {Q_k} $ 0.8 bit/(s·Hz)
下载: 导出CSV
-
[1] XU Yongjun, LIU Zijian, HUANG Chongwen, et al. Robust resource allocation algorithm for energy-harvesting-based D2D communication underlaying UAV-assisted networks[J]. IEEE Internet of Things Journal, 2021, 8(23): 17161–17171. doi: 10.1109/JIOT.2021.3078264. [2] PARVINI M, ZARIF A H, NOURUZI A, et al. Spectrum sharing schemes from 4G to 5G and beyond: Protocol flow, regulation, ecosystem, economic[J]. IEEE Open Journal of the Communications Society, 2023, 4: 464–517. doi: 10.1109/OJCOMS.2023.3238569. [3] NGUYEN H T, TUAN H D, DUONG T Q, et al. Joint D2D assignment, bandwidth and power allocation in cognitive UAV-enabled networks[J]. IEEE Transactions on Cognitive Communications and Networking, 2020, 6(3): 1084–1095. doi: 10.1109/TCCN.2020.2969623. [4] LI Xuanheng, CHENG Sike, DING Haichuan, et al. When UAVs meet cognitive radio: Offloading traffic under uncertain spectrum environment via deep reinforcement learning[J]. IEEE Transactions on Wireless Communications, 2023, 22(2): 824–838. doi: 10.1109/TWC.2022.3198665. [5] MENG Kaitao, WU Qingqing, MA Shaodan, et al. Throughput maximization for UAV-enabled integrated periodic sensing and communication[J]. IEEE Transactions on Wireless Communications, 2023, 22(1): 671–687. doi: 10.1109/TWC.2022.3197623. [6] JI Jiequ, ZHU Kun, NIYATO D, et al. Joint trajectory design and resource allocation for secure transmission in cache-enabled UAV-relaying networks with D2D communications[J]. IEEE Internet of Things Journal, 2021, 8(3): 1557–1571. doi: 10.1109/JIOT.2020.3013647. [7] CHEN Peixin, ZHOU Xuan, ZHAO Jian, et al. Energy-efficient resource allocation for secure D2D communications underlaying UAV-enabled networks[J]. IEEE Transactions on Vehicular Technology, 2022, 71(7): 7519–7531. doi: 10.1109/TVT.2022.3168277. [8] HUANG Yuwei, MEI Weidong, XU Jie, et al. Cognitive UAV communication via joint maneuver and power control[J]. IEEE Transactions on Communications, 2019, 67(11): 7872–7888. doi: 10.1109/TCOMM.2019.2931322. [9] HUA Meng, YANG Luxi, WU Qingqing, et al. 3D UAV trajectory and communication design for simultaneous uplink and downlink transmission[J]. IEEE Transactions on Communications, 2020, 68(9): 5908–5923. doi: 10.1109/TCOMM.2020.3003662. [10] TAO Zhenhui, ZHOU Fuhui, WANG Yuhao, et al. Resource allocation and trajectories design for UAV-assisted jamming cognitive UAV networks[J]. China Communications, 2022, 19(5): 206–217. doi: 10.23919/JCC.2021.00.007. [11] JIANG Yuhan and ZHU Jia. Three-dimensional trajectory optimization for secure UAV-enabled cognitive communications[J]. China Communications, 2021, 18(12): 285–296. doi: 10.23919/JCC.2021.12.018. [12] LI Hangqi and ZHAO Xiaohui. Throughput maximization with energy harvesting in UAV-assisted cognitive mobile relay networks[J]. IEEE Transactions on Cognitive Communications and Networking, 2021, 7(1): 197–209. doi: 10.1109/TCCN.2020.2988556. [13] WANG Haichao, WANG Jinlong, DING Guorui, et al. Spectrum sharing planning for full-duplex UAV relaying systems with underlaid D2D communications[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 1986–1999. doi: 10.1109/JSAC.2018.2864375. [14] MATAR A S and SHEN Xuemin. Joint subchannel allocation and power control in licensed and unlicensed spectrum for multi-cell UAV-cellular network[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(11): 3542–3554. doi: 10.1109/JSAC.2021.3088672. [15] ATHUKORALAGE D, GUVENC I, SAAD W, et al. Regret based learning for UAV assisted LTE-U/WiFi public safety networks[C]. 2016 IEEE Global Communications Conference, Washington, USA, 2016: 1–7. [16] CHEN Mingzhe, SAAD W, and YIN Changchuan. Echo state learning for wireless virtual reality resource allocation in UAV-enabled LTE-U networks[C]. 2018 IEEE International Conference on Communications, Kansas City, USA, 2018: 1–6. [17] CHEN Mingzhe, SAAD W, and YIN Changchuan. Liquid state machine learning for resource and cache management in LTE-U unmanned aerial vehicle (UAV) networks[J]. IEEE Transactions on Wireless Communications, 2019, 18(3): 1504–1517. doi: 10.1109/TWC.2019.2891629. [18] XU Chan, LI Deshi, CHEN Qimei, et al. Joint trajectory and transmission optimization for energy efficient UAV enabled eLAA network[J]. Ad Hoc Networks, 2021, 116: 102466. doi: 10.1016/j.adhoc.2021.102466. [19] XU Chan, CHEN Qimei, and LI Deshi. Joint trajectory design and resource allocation for energy-efficient UAV enabled eLAA network[C]. 2019 IEEE International Conference on Communications, Shanghai, China, 2019: 1–6. [20] XIONG Xinxuan, SUN Chao, NI Wei, et al. Three-dimensional trajectory design for unmanned aerial vehicle-based secure and energy-efficient data collection[J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 664–678. doi: 10.1109/TVT.2022.3203714. [21] NOBAR S K, AHMED M H, MORGAN Y, et al. Resource allocation in cognitive radio-enabled UAV communication[J]. IEEE Transactions on Cognitive Communications and Networking, 2022, 8(1): 296–310. doi: 10.1109/TCCN.2021.3103531. [22] HU Zhenzhen, ZENG Fanzi, XIAO Zhu, et al. Computation efficiency maximization and QoE-provisioning in UAV-enabled MEC communication systems[J]. IEEE Transactions on Network Science and Engineering, 2021, 8(2): 1630–1645. doi: 10.1109/TNSE.2021.3068123. [23] CAI Yuanxin, WEI Zhiqiang, HU Shaokang, et al. Resource allocation and 3D trajectory design for power-efficient IRS-assisted UAV-NOMA communications[J]. IEEE Transactions on Wireless Communications, 2022, 21(12): 10315–10334. doi: 10.1109/TWC.2022.3183300. [24] ZENG Yong, XU Jie, and ZHANG Rui. Energy minimization for wireless communication with rotary-wing UAV[J]. IEEE Transactions on Wireless Communications, 2019, 18(4): 2329–2345. doi: 10.1109/TWC.2019.2902559. [25] GAO Ning, ZENG Yong, WANG Jian, et al. Energy model for UAV communications: Experimental validation and model generalization[J]. China Communications, 2021, 18(7): 253–264. doi: 10.23919/JCC.2021.07.020. [26] SU Zhijie, FENG Wanmei, TANG Jie, et al. Energy-efficiency optimization for D2D communications underlaying UAV-assisted industrial IoT networks with SWIPT[J]. IEEE Internet of Things Journal, 2023, 10(3): 1990–2002. doi: 10.1109/JIOT.2022.3142026. [27] TRAN Q N, VO N S, BUI M P, et al. Spectrum sharing and power allocation optimised multihop multipath D2D video delivery in beyond 5G networks[J]. IEEE Transactions on Cognitive Communications and Networking, 2022, 8(2): 919–930. doi: 10.1109/TCCN.2021.3133838. [28] LAI Lifeng, FENG Daquan, ZHENG Fuchun, et al. CQI-based interference detection and resource allocation with QoS provision in LTE-U systems[J]. IEEE Transactions on Vehicular Technology, 2021, 70(2): 1421–1433. doi: 10.1109/TVT.2021.3052530. -

 下载:
下载:




图(18) / 表(3)
计量
- 文章访问数: 1739
- HTML全文浏览量: 847
- PDF下载量: 123
- 被引次数: 0
