

Routing Optimization of Ultra Violet Light Communication Unmanned Aerial Vehicle Formation Based on JAYA Algorithm
-
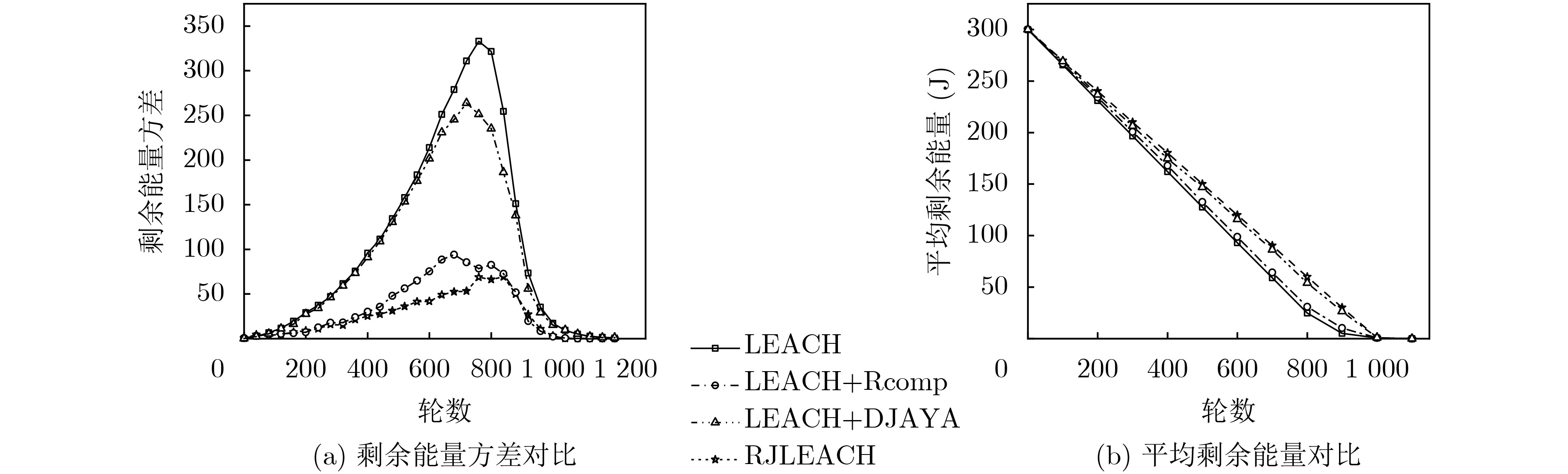
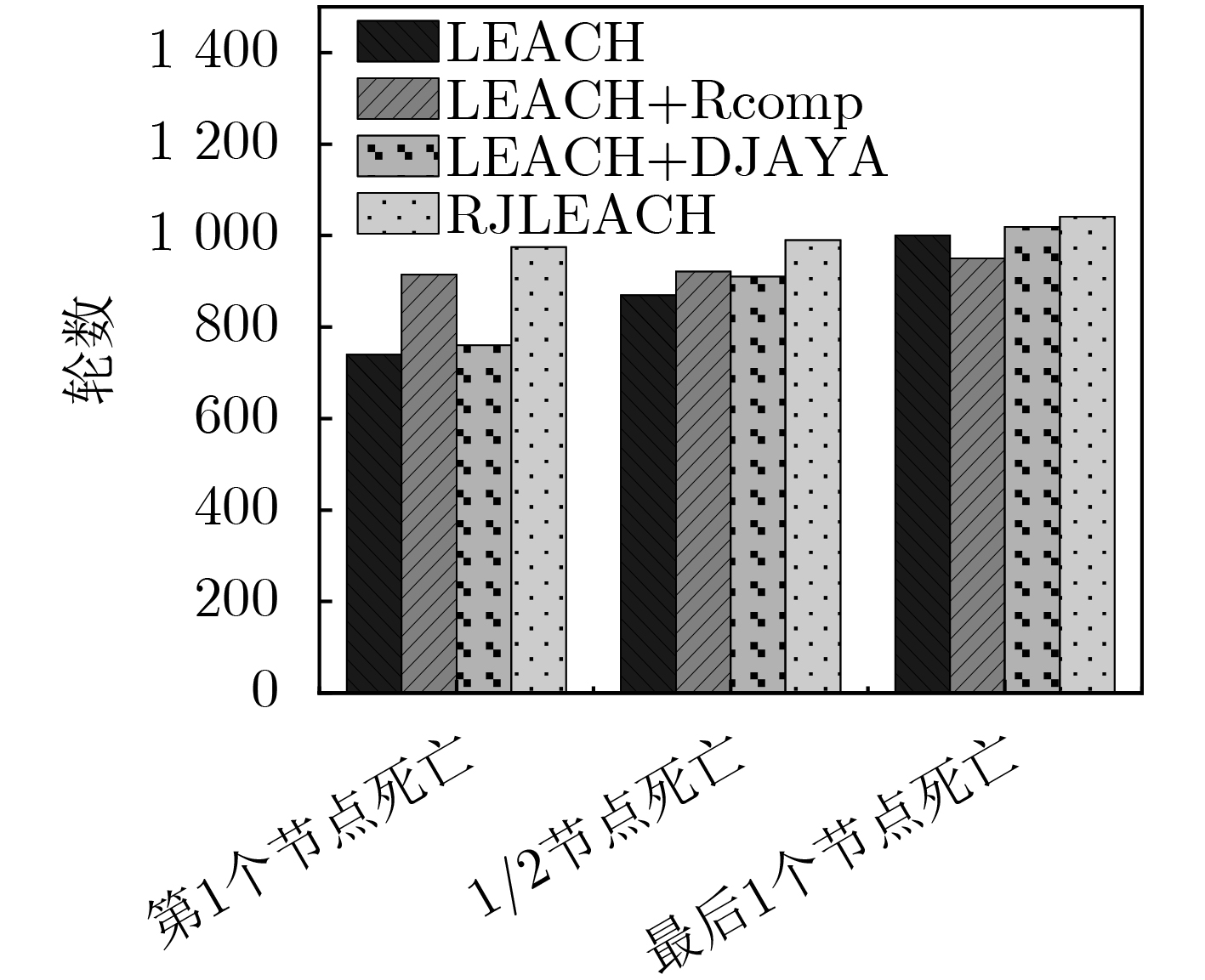
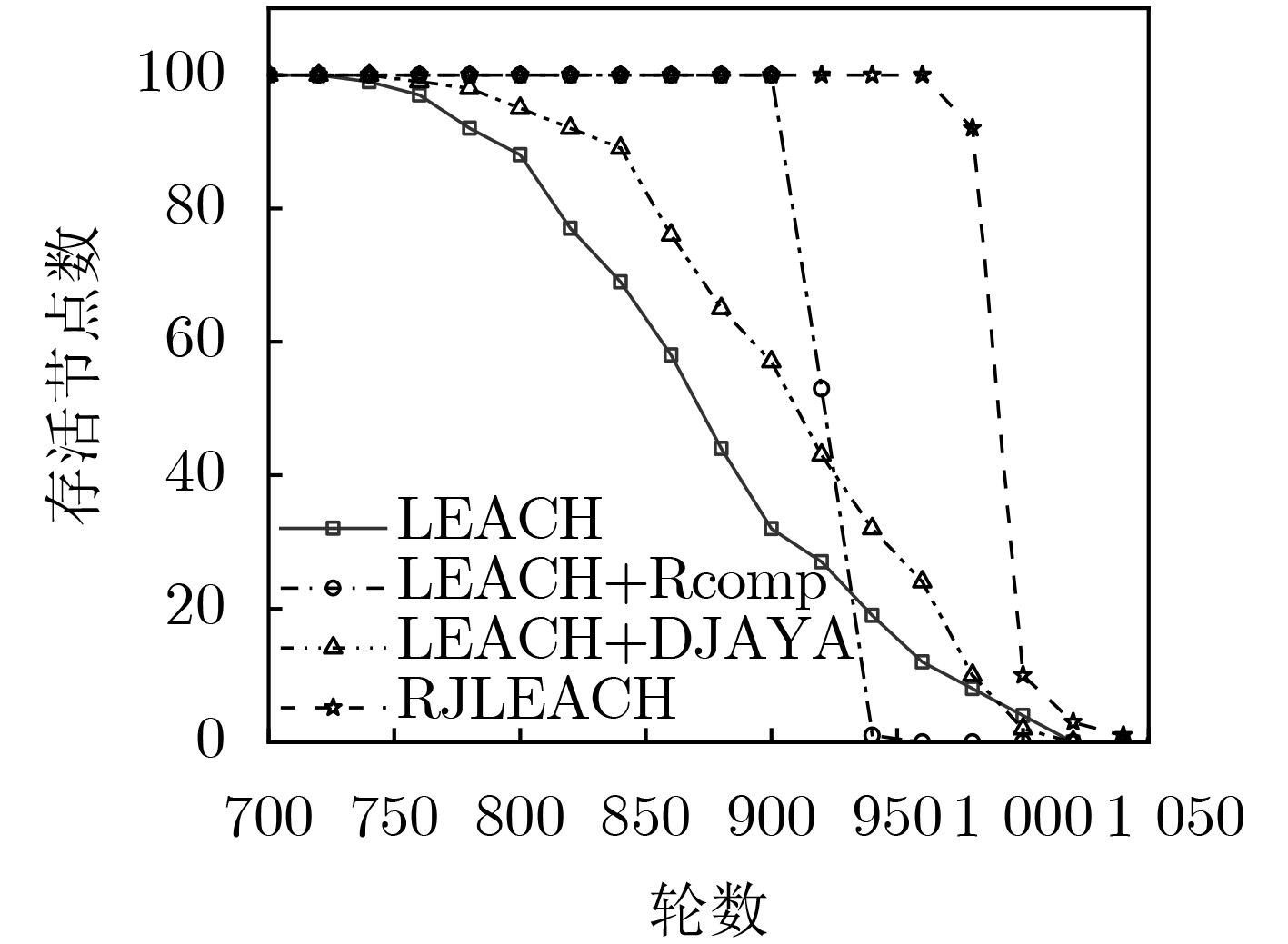
摘要: 紫外光通信由于其灵活性高、安全性好和全天候工作等优点,被认为是应急通信用无人机编队(UAV)的有潜力通信解决方案。为了提升紫外光通信无人机编队的有效作业时间,该文基于低功耗自适应集簇分层(LEACH)算法,并结合JAYA智能优化算法提出一种新颖的路由优化算法(RJLEACH)。该方法被用来改善紫外光通信无人机编队的有效操作时间。应用该算法对不同结构的紫外光通信无人机编队路由优化,并与其它算法得到的结果进行了比较分析。结果表明,RJLEACH算法在簇首选举阶段降低了无人机节点间的剩余能量方差,并且通过搜索最优路由降低了簇间通信的能量消耗。最终使网络出现第1个死亡节点和出现1/2死亡节点的时间相比经典LEACH算法分别延长了31.8%和13.8%,同时明显提高了能量利用率,能够为灾区救援和应急通信等任务争取宝贵的时间。Abstract: Due to its high flexibility, good safety and all-weather work, ultraviolet light communication is considered to be a potential communication solution for the emergency communication Unmanned Aerial Vehicle (UAV) formation. Based on the Low Energy Adaptive Clustering Hierarchy (LEACH) algorithm, and combined with JAYA intelligent optimization algorithm, a novel routing optimization algorithm Rcomp JAYA LEACH (RJLEACH) is proposed to improve the effective operation time of the ultraviolet light communication UAV formation. The algorithm is applied to optimize the formation routing of ultraviolet light communication UAVs with different structures, and the results obtained by other algorithms are compared and analyzed. The results show that RJLEACH algorithm reduces the residual energy variance between UAV nodes in the cluster head election stage, and the search for the optimal route reduces the energy consumption of inter-cluster communication. Finally, the time of the first node’s death and half nodes’ death in the network are prolonged by 31.8% and 13.8%, respectively compared with the classic LEACH algorithm, and the energy utilization rate is significantly improved, which can gain valuable time for tasks such as disaster relief and emergency communication.
-
表 1 仿真实验参数
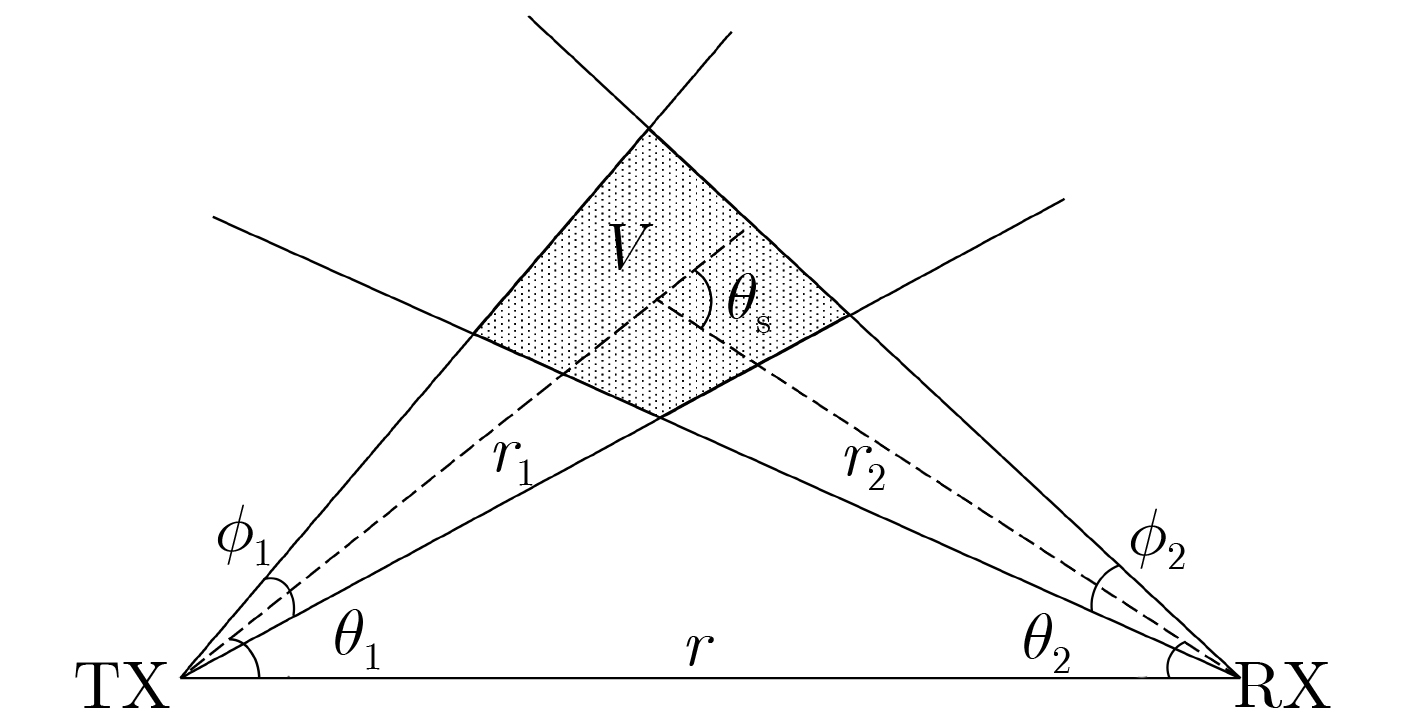
参数 值 紫外光波长$\lambda $(nm) 266 初始能量${E_0}$(J) 300 ${E_{\text{T}}}$,$ {E}_{\text{R}} $(μJ) 8 $ {E}_{\text{DA}} $(μJ) 0.8 ${\theta _1}$,${\theta _2}$(°) 40 ${\phi _1}$,${\phi _2}$(°) 30 路径损耗因子$\xi $ 1.69×108 路径损耗指数$\alpha $ 1.349 8 数据包大小DPS(bit/轮) 5 000 控制包大小CPS(bit/轮) 400  下载: 导出CSV
下载: 导出CSV
-
[1] BUPE P, HADDAD R, and RIOS-GUTIERREZ F. Relief and emergency communication network based on an autonomous decentralized UAV clustering network[C]. The SoutheastCon 2015, Fort Lauderdale, USA, 2015: 1–8. doi: 10.1109/SECON.2015.7133027. [2] 张宏宏, 甘旭升, 李双峰, 等. 复杂低空环境下考虑区域风险评估的无人机航路规划[J]. 仪器仪表学报, 2021, 42(1): 257–266. doi: 10.19650/j.cnki.cjsi.J2007192.ZHANG Honghong, GAN Xusheng, LI Shuangfeng, et al. UAV route planning considering regional risk assessment under complex low altitude environment[J]. Chinese Journal of Scientific Instrument, 2021, 42(1): 257–266. doi: 10.19650/j.cnki.cjsi.J2007192. [3] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933. [4] 方东南, 刘阔. 无人机在消防应急通信保障中的应用[J]. 电子技术, 2022, 51(7): 216–217.FANG Dongnan and LIU Kuo. Application of UAV in fire emergency communication support[J]. Electronic Technology, 2022, 51(7): 216–217. [5] ZHANG Tiankui, LEI Jiayi, LIU Yuanwei, et al. Trajectory optimization for UAV emergency communication with limited user equipment energy: A safe-DQN approach[J]. IEEE Transactions on Green Communications and Networking, 2021, 5(3): 1236–1247. doi: 10.1109/TGCN.2021.3068333. [6] 道格拉斯·威斯, 胡文翰. 中国大力发展无人机"蜂群”作战能力[J]. 环球军事, 2017(22): 68. doi: 10.ssss/j.issn.1009-9816.2017.22.039.DOUGLAS W and HU Wenhan. The rapid development of UAV swarm combat capability in China[J]. Global Military, 2017(22): 68. doi: 10.ssss/j.issn.1009-9816.2017.22.039. [7] 焦士俊, 王冰切, 刘剑豪, 等. 国内外无人机蜂群研究现状综述[J]. 航天电子对抗, 2019, 35(1): 61–64. doi: 10.3969/j.issn.1673-2421.2019.01.014.JIAO Shijun, WANG Bingqie, LIU Jianhao, et al. Review of drone swarm research at home and abroad[J]. Aerospace Electronic Warfare, 2019, 35(1): 61–64. doi: 10.3969/j.issn.1673-2421.2019.01.014. [8] 王沁飞, 南建国, 黄金科, 等. 基于加权的无人机集群组网分簇算法[J]. 计算机应用研究, 2019, 36(5): 1500–1503,1514. doi: 10.19734/j.issn.1001-3695.2017.12.0764.WANG Qinfei, NAN Jianguo, HUANG Jinke, et al. Weighting based clustering algorithm for FANET[J]. Application Research of Computers, 2019, 36(5): 1500–1503,1514. doi: 10.19734/j.issn.1001-3695.2017.12.0764. [9] KALAIVANAN K and BHANUMATHI V. Unmanned aerial vehicle based reliable and energy efficient data collection from red alerted area using wireless sensor networks with IoT[J]. Journal of Information Science and Engineering, 2019, 35(3): 521–536. doi: 10.6688/JISE.201905_35(3).0003. [10] MI Jinlong, WEN Xiangming, SUN Chunlei, et al. Energy-efficient and low package loss clustering in UAV-assisted WSN using Kmeans++ and fuzzy logic[C]. 2019 IEEE/CIC International Conference on Communications Workshops in China, Changchun, China, 2019: 210–215. doi: 10.1109/ICCChinaW.2019.8849956. [11] MARCUS M J. Spectrum policy challenges of UAV/drones [Spectrum Policy and Regulatory Issues][J]. IEEE Wireless Communications, 2014, 21(5): 8–9. doi: 10.1109/MWC.2014.6940426. [12] SHALABY M, SAAD W, SHOKAIR M, et al. Evaluation of electromagnetic interference in wireless broadband systems[J]. Wireless Personal Communications, 2017, 96(2): 2223–2237. doi: 10.1007/s11277-017-4294-0. [13] CHEN Guozhi, WU Tianfeng, YANG Fang, et al. Ultraviolet-based UAV swarm communications: Potentials and challenges[J]. IEEE Wireless Communications, 2022, 29(5): 84–90. doi: 10.1109/MWC.007.2100405. [14] ZENG Yong and ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(6): 3747–3760. doi: 10.1109/TWC.2017.2688328. [15] YU Yunlong, RU Le, FANG Kun, et al. Comprehensive mobility prediction based clustering algorithm for Ad hoc UAV networks[C]. The 4th International Conference on Machinery, Materials and Computing Technology, 2016: 600–613. doi: 10.2991/icmmct-16.2016.121. [16] WU Wenliang, XIONG Naixue, and WU Chunxue. Improved clustering algorithm based on energy consumption in wireless sensor networks[J]. IET Networks, 2017, 6(3): 47–53. doi: 10.1049/iet-net.2016.0115. [17] 赵太飞, 程敏花, 张港, 等. 无线紫外光协作无人机蜂群能效优化路由算法[J]. 激光与光电子学进展, 2022, 59(5): 0506005. doi: 10.3788/LOP202259.0506005.ZHAO Taifei, CHENG Minhua, ZHANG Gang, et al. Energy efficiency optimization routing algorithm for wireless ultraviolet cooperative UAV swarm[J]. Laser & Optoelectronics Progress, 2022, 59(5): 0506005. doi: 10.3788/LOP202259.0506005. [18] GUNDUZ M and ASLAN M. DJAYA: A discrete Jaya algorithm for solving traveling salesman problem[J]. Applied Soft Computing, 2021, 105: 107275. doi: 10.1016/j.asoc.2021.107275. [19] LIU Chao, WANG Meng, ZENG Qian, et al. Leader-following flocking for unmanned aerial vehicle swarm with distributed topology control[J]. Science China Information Sciences, 2020, 63(4): 140312. doi: 10.1007/s11432-019- 2763-5. [20] DING Ying and TONG Shoufeng. A simplified NLOS UV communication model[C]. 2012 International Conference on Optoelectronics and Microelectronics, Changchun, China, 2012: 250–255. doi: 10.1109/ICoOM.2012.6316266. [21] XU Zhengyuan, DING Haipeng, SADLER B M, et al. Analytical performance study of solar blind non-line-of-sight ultraviolet short-range communication links[J]. Optics Letters, 2008, 33(16): 1860–1862. doi: 10.1364/OL.33.001860. [22] HE Qunfeng, XU Zhengyuan, and SADLER B M. Performance of short-range non-line-of-sight LED-based ultraviolet communication receivers[J]. Optics Express, 2010, 18(12): 12226–12238. doi: 10.1364/OE.18.012226. [23] CHEN Gang, XU Zhengyuan, DING Haipeng, et al. Path loss modeling and performance trade-off study for short-range non-line-of-sight ultraviolet communications[J]. Optics Express, 2009, 17(5): 3929–3940. doi: 10.1364/OE.17.003929. [24] 赵太飞, 许杉, 屈瑶, 等. 基于无线紫外光隐秘通信的侦察无人机蜂群分簇算法[J]. 电子与信息学报, 2019, 41(4): 967–972. doi: 10.11999/JEIT180491.ZHAO Taifei, XU Shan, QU Yao, et al. Cluster-based algorithm of reconnaissance UAV swarm based on wireless ultraviolet secret communication[J]. Journal of Electronics & Information Technology, 2019, 41(4): 967–972. doi: 10.11999/JEIT180491. [25] KIRAN M S. TSA: Tree-seed algorithm for continuous optimization[J]. Expert Systems with Applications, 2015, 42(19): 6686–6698. doi: 10.1016/j.eswa.2015.04.055. [26] ROVIRA-SUGRANES A, RAZI A, AFGHAH F, et al. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook[J]. Ad Hoc Networks, 2022, 130: 102790. doi: 10.1016/j.adhoc.2022.102790. [27] 李杰, 宫二玲, 孙志强, 等. 航空自组网STDMA时隙分配算法的设计与实现[J]. 航空学报, 2014, 35(12): 3371–3383. doi: 10.7527/S1000-6893.2014.0057.LI Jie, GONG Erling, SUN Zhiqiang, et al. Design and implementation of STDMA slot allocation algorithm for aeronautical Ad Hoc networks[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(12): 3371–3383. doi: 10.7527/S1000-6893.2014.0057. -

 下载:
下载:




图(11) / 表(1)
计量
- 文章访问数: 916
- HTML全文浏览量: 469
- PDF下载量: 60
- 被引次数: 0
