

Directional Reception Low Collision Probability MAC Protocol for Underwater Acoustic Networks
-
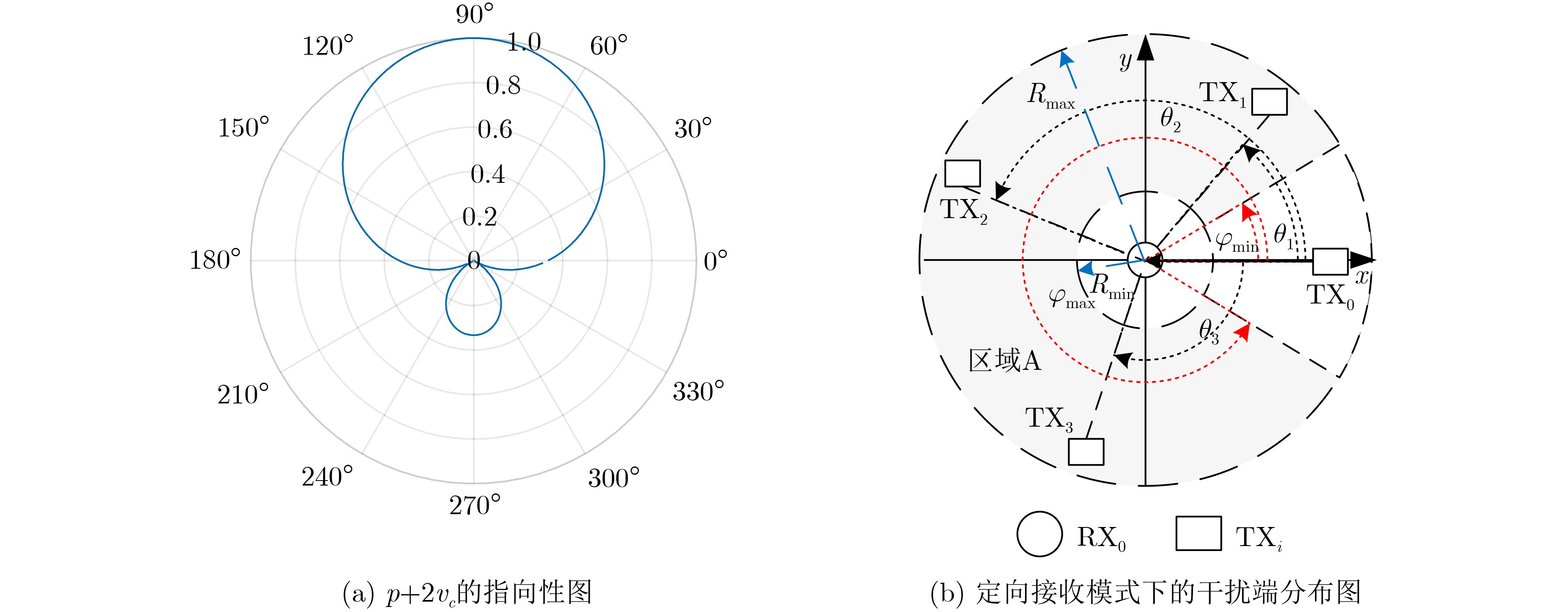
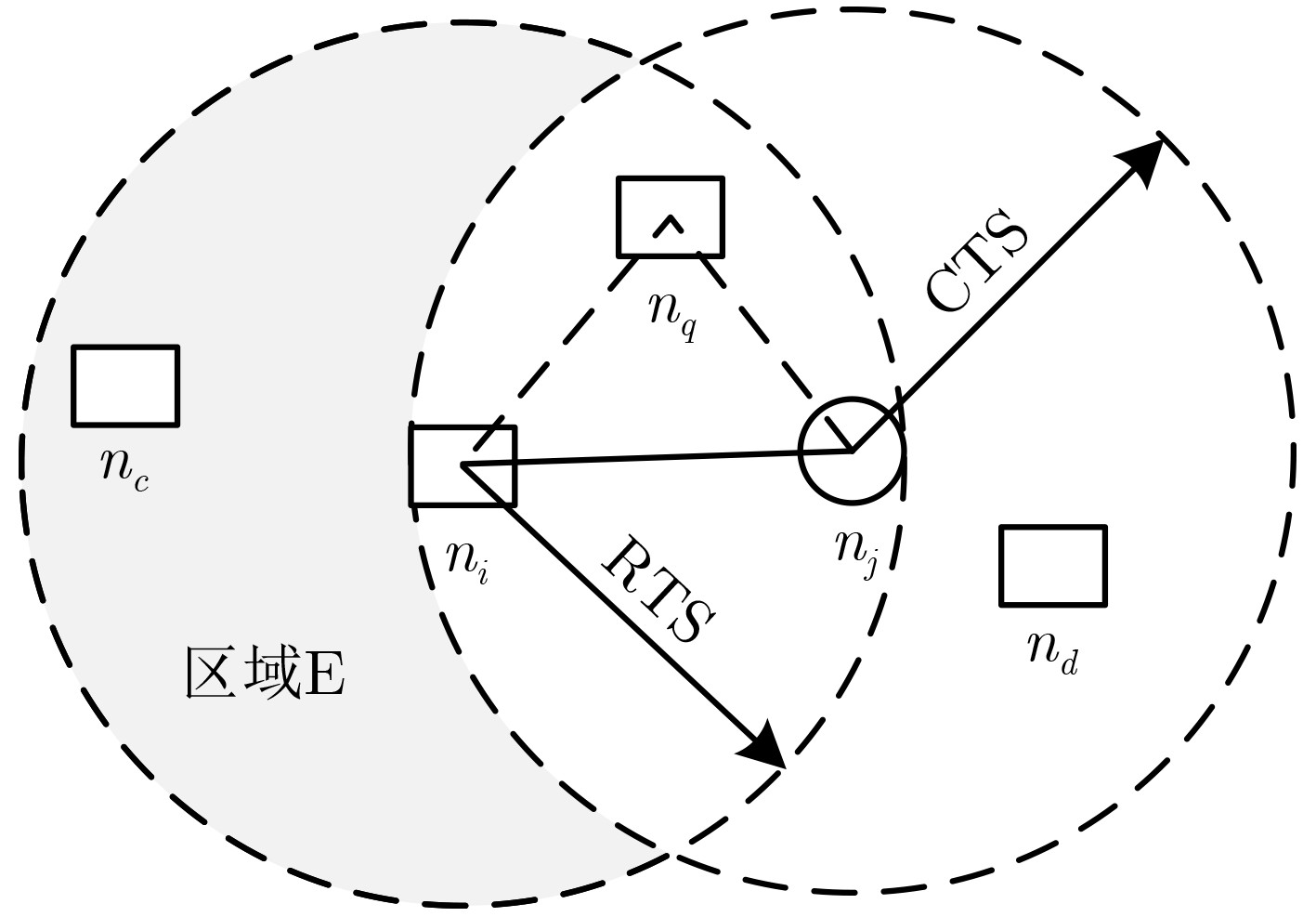
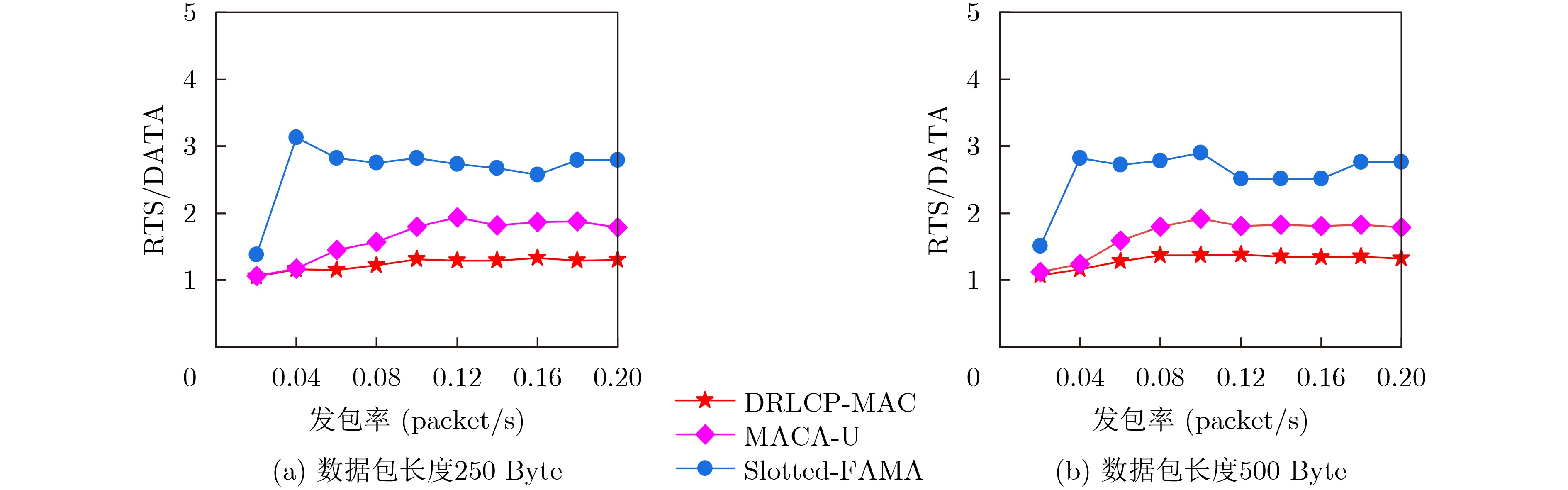
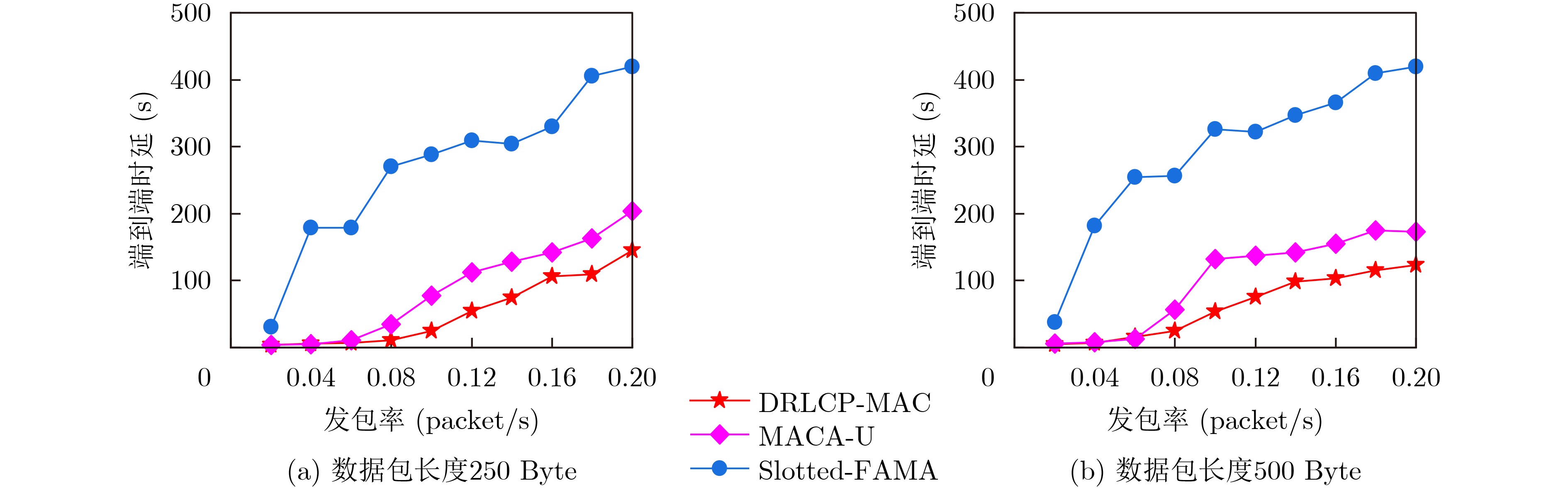
摘要: 在全向水声通信网络场景中,较大的传播时延和较高的数据包碰撞率严重影响了网络性能。相比全向接收技术,声矢量传感器的声压和振速通过线性加权组合可以形成单边指向性,实现定向接收某个方向上的信号,进而提高网络的空间复用率。该文首先分析了声矢量传感器定向接收模式下的网络中断概率,验证定向接收技术网络应用的可行性。然后,提出了定向接收低冲突概率媒体接入控制协议(DRLCP-MAC)。该协议利用指向性接收波束握手机制建立稳定的数据传输链路,通过状态转移策略构建多对并行通信链路,缩小虚拟载波监听范围,提高网络的空间复用度。仿真结果表明,与水下冲突避免多址接入协议(MACA-U)和时隙地面多址接入协议(Slotted-FAMA)相比,DRLCP-MAC协议使信道接入成本降低了约50%和60%,网络吞吐量提升了约60%和400%,端到端时延降低了约50%和85%。Abstract: In the omni-directional underwater acoustic communication network, large propagation delay and high packet collision rate seriously affect the network performance. Compared with the omni-directional reception, the sound pressure and vibration velocity of the acoustic vector sensor can form a unilateral directivity through the linear weighted combination, so as to realize the directional reception of signals in a certain direction, and then effectively improve the network spatial multiplexing rate. The network outage probability in the directional reception mode of single vector sensor is analyzed, and its feasibility is also verified. Then, a Directional Reception Low Collision Probability Media Access Control (DRLCP-MAC) protocol is proposed, which uses a directional reception beam handshake mechanism to establish a stable data transmission link, and constructs multiple pairs of parallel communication links through state transition strategy, so as to reduce virtual carrier monitoring range and improve spatial reuse of the network. Simulation results show that compared with Multiple Access Collision Avoidance for Underwater (MACA-U) protocol and Slotted Floor Acquisition Multiple Access (Slotted-FAMA) protocol, the channel access cost of DRLCP-MAC is reduced by 50% and 60%, the network throughput is increased by about 60% and 400%, and the end-to-end delay is reduced by about 50% and 85%.
-
[1] ISLAM K Y, AHMAD I, HABIBI D, et al. A survey on energy efficiency in underwater wireless communications[J]. Journal of Network and Computer Applications, 2022, 198: 103295. doi: 10.1016/j.jnca.2021.103295. [2] CAMPAGNARO F, STEINMETZ F, and RENNER B C. Survey on low-cost underwater sensor networks: From niche applications to everyday use[J]. Journal of Marine Science and Engineering, 2023, 11(1): 125. doi: 10.3390/jmse 11010125. [3] BELLO O and ZEADALLY S. Internet of underwater things communication: Architecture, technologies, research challenges and future opportunities[J]. Ad Hoc Networks, 2022, 135: 102933. doi: 10.1016/j.adhoc.2022.102933. [4] PAL A, CAMPAGNARO F, ASHRAF K, et al. Communication for underwater sensor networks: A comprehensive summary[J]. ACM Transactions on Sensor Networks, 2023, 19(1): 22. doi: 10.1145/3546827. [5] YANG Yang and YUM T S P. Delay distributions of slotted ALOHA and CSMA[J]. IEEE Transactions on Communications, 2003, 51(11): 1846–1857. doi: 10.1109/TCOMM.2003.819201. [6] MA R T B, MISRA V, and RUBENSTEIN D. An analysis of generalized slotted-aloha protocols[J]. IEEE/ACM Transactions on Networking, 2009, 17(3): 936–949. doi: 10.1109/tnet.2008.925633. [7] CHEN Weiqi, GUAN Quansheng, YU Hua, et al. Medium access control under space-time coupling in underwater acoustic networks[J]. IEEE Internet of Things Journal, 2021, 8(15): 12398–12409. doi: 10.1109/JIOT.2021.3063462. [8] MOLINS M and STOJANOVIC M. Slotted FAMA: A MAC protocol for underwater acoustic networks[C]. OCEANS 2006-Asia Pacific, Singapore, 2006: 1–7. doi: 10.1109/OCEANSAP.2006.4393832. [9] NG H H, SOH W S, and MOTANI M. MACA-U: A media access protocol for underwater acoustic networks[C]. IEEE GLOBECOM 2008–2008 IEEE Global Telecommunications Conference, New Orleans, USA, 2008: 1–5. doi: 10.1109/GLOCOM.2008.ECP.165. [10] MUZZAMMIL M, AHMED N, QIAO Gang, et al. Fundamentals and advancements of magnetic-field communication for underwater wireless sensor networks[J]. IEEE Transactions on Antennas and Propagation, 2020, 68(11): 7555–7570. doi: 10.1109/TAP.2020.3001451. [11] EMOKPAE L E and YOUNIS M. Throughput analysis for shallow water communication utilizing directional antennas[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 1006–1018. doi: 10.1109/JSAC.2012.120615. [12] 杨健敏, 乔钢, 聂东虎, 等. 基于定向收发的水声通信网络邻节点发现机制[J]. 电子与信息学报, 2018, 40(11): 2765–2771. doi: 10.11999/JEIT180108.YANG Jianmin, QIAO Gang, NIE Donghu, et al. Neighbor discovery mechanism for underwater acoustic communication networks based on directional transmission and reception[J]. Journal of Electronics & Information Technology, 2018, 40(11): 2765–2771. doi: 10.11999/JEIT180108. [13] 刘奇佩, 乔钢, MAZHAR S. 水声网络全双工定向碰撞避免媒体接入控制协议[J]. 电子与信息学报, 2023, 45(2): 524–533. doi: 10.11999/JEIT211426.LIU Qipei, QIAO Gang, and MAZHAR S. Full-duplex directional collision avoidance MAC protocol for underwater acoustic networks[J]. Journal of Electronics & Information Technology, 2023, 45(2): 524–533. doi: 10.11999/JEIT211426. [14] 姚直象, 惠俊英, 殷敬伟, 等. 基于单矢量水听器四种方位估计方法[J]. 海洋工程, 2006, 24(1): 122–127,131. doi: 10.16483/j.issn.1005-9865.2006.01.019.YAO Zhixiang, HUI Junying, YIN Jingwei, et al. Four approaches to DOA estimation based on a single vector hydrophone[J]. The Ocean Engineering, 2006, 24(1): 122–127,131. doi: 10.16483/j.issn.1005-9865.2006.01.019. [15] 桑恩方, 乔钢. 基于声矢量传感器的水声通信技术研究[J]. 声学学报, 2006, 31(1): 61–67. doi: 10.15949/j.cnki.0371-0025.2006.01.010.SANG Enfang and QIAO Gang. The study of underwater acoustic communication technology based-on the acoustic vector sensor[J]. Acta Acustica, 2006, 31(1): 61–67. doi: 10.15949/j.cnki.0371-0025.2006.01.010. [16] 殷敬伟, 杨森, 杜鹏宇, 等. 基于单矢量有源平均声强器的码分多址水声通信[J]. 物理学报, 2012, 61(6): 064302. doi: 10.7498/aps.61.064302.YIN Jingwei, YANG Sen, DU Pengyu, et al. Code divided multiple access underwater acoustic communication based on active acoustic intensity average[J]. Acta Physica Sinica, 2012, 61(6): 064302. doi: 10.7498/aps.61.064302. [17] 惠俊英, 惠娟. 矢量声信号处理基础[M]. 北京: 国防工业出版社, 2009: 6–15.HUI Junying, HUI Juan. Vector signal processing fundamental theory[M]. Beijing: National Defense Industry Press, 2009: 6–15. [18] 黄熠, 刘书杰, 刘和兴, 等. 基于单矢量水听器的水声通信接收机的设计与实现[J]. 中国电子科学研究院学报, 2021, 16(7): 674–683,697. doi: 10.3969/j.issn.1673-5692.2021.07.007.HUANG Yi, LIU Shujie, LIU Hexing, et al. Design and implementation of underwater acoustic communication receiver machine based on single vector hydrophone[J]. Journal of China Academy of Electronics and Information Technology, 2021, 16(7): 674–683,697. doi: 10.3969/j.issn.1673-5692.2021.07.007. [19] POLPRASERT C, RITCEY J A, and STOJANOVIC M. Capacity of OFDM systems over fading underwater acoustic channels[J]. IEEE Journal of Oceanic Engineering, 2011, 36(4): 514–524. doi: 10.1109/JOE.2011.2167071. [20] LU Songtao, WANG Zhengdao, WANG Zhaohui, et al. Throughput of underwater wireless ad hoc networks with random access: A physical layer perspective[J]. IEEE Transactions on Wireless Communications, 2015, 14(11): 6257–6268. doi: 10.1109/TWC.2015.2451625. [21] BREKHOVSKIKH L M and LYSANOV Y. Fundamentals of Ocean Acoustics[M]. Berlin: Springer, 1982: 8–11. doi: 10.1007/978-3-662-02342-6. -

 下载:
下载:




图(6)
计量
- 文章访问数: 977
- HTML全文浏览量: 434
- PDF下载量: 66
- 被引次数: 0
