

Time Domain Hybrid Algorithm for the Coupling Analysis of Harness Cable with Bent and Stereoscopic Configurations
-
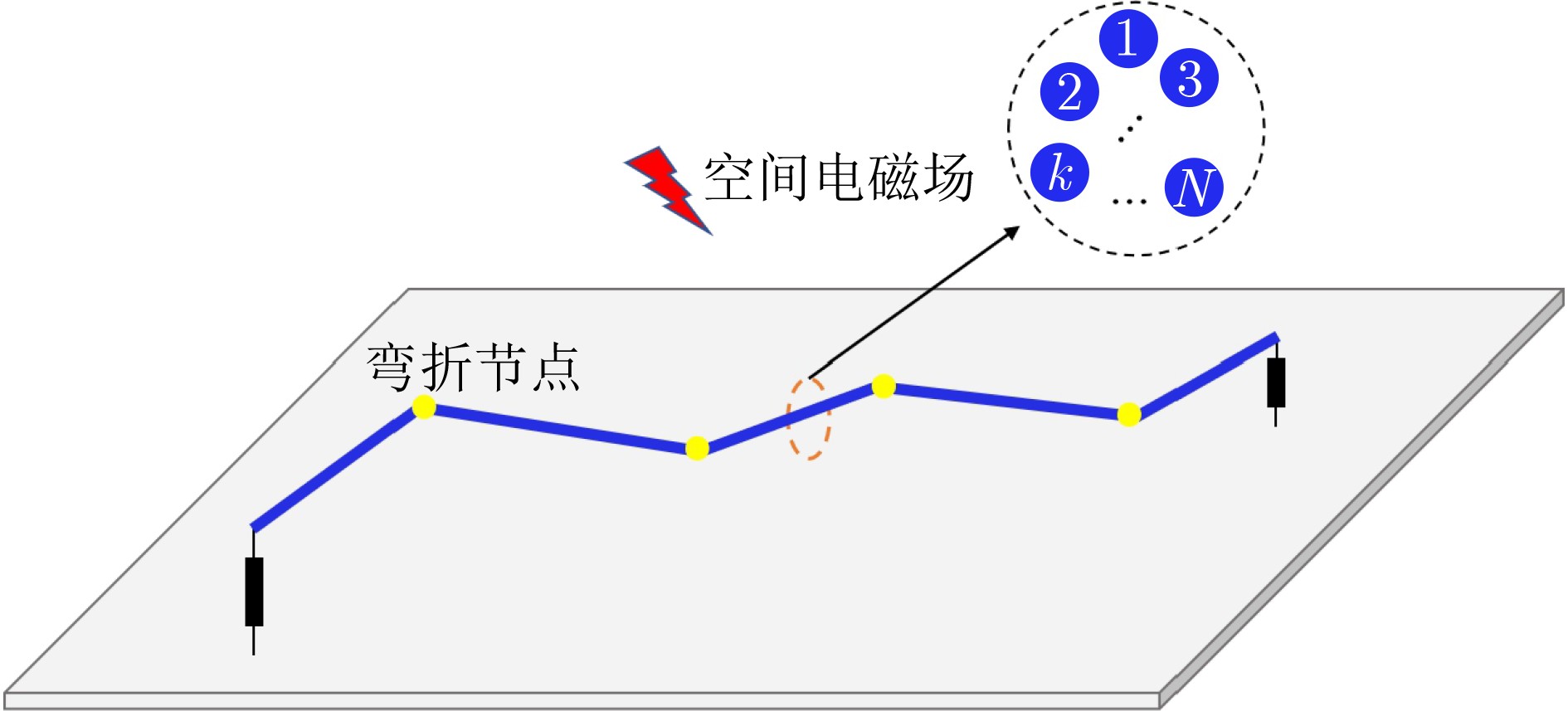
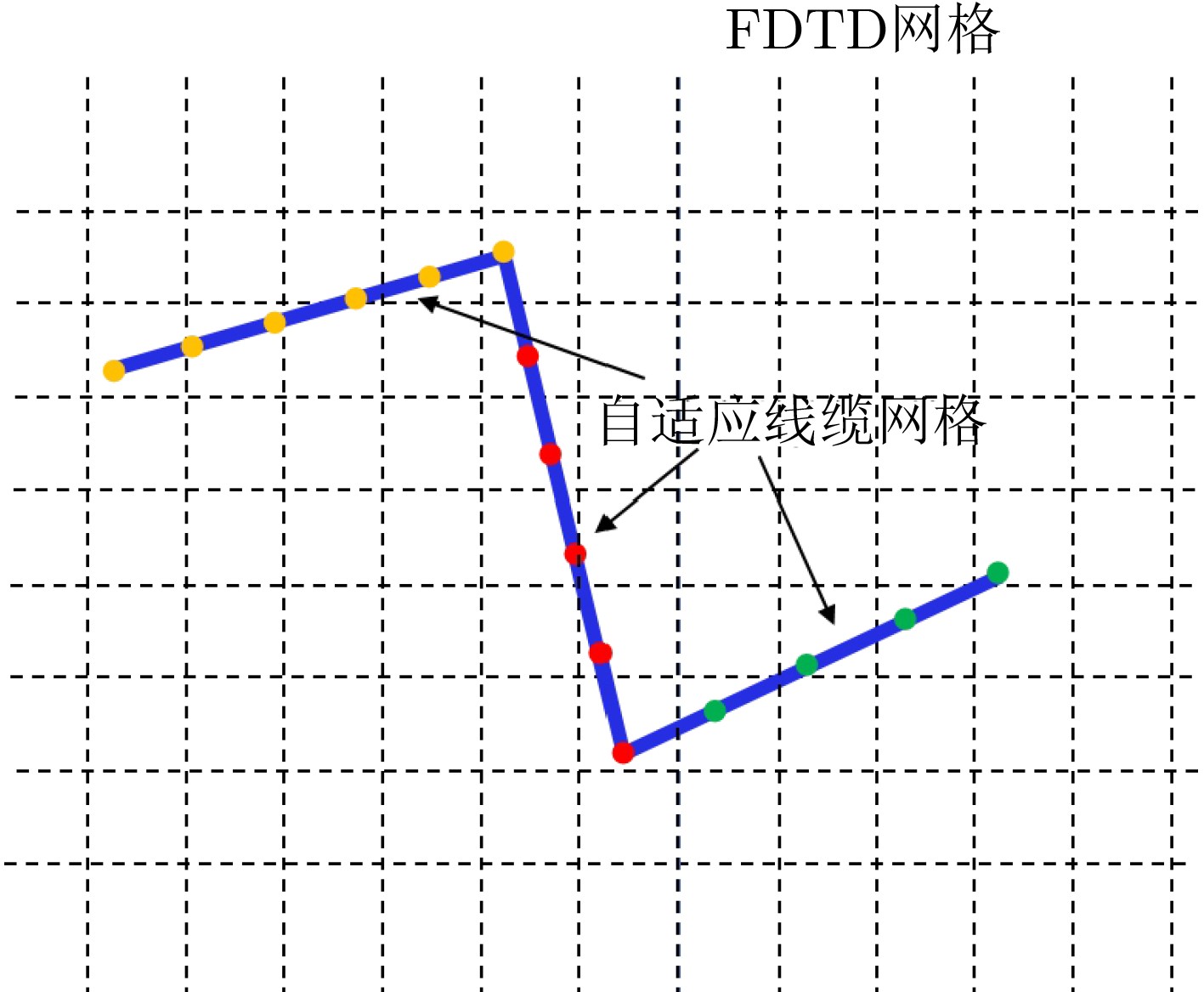
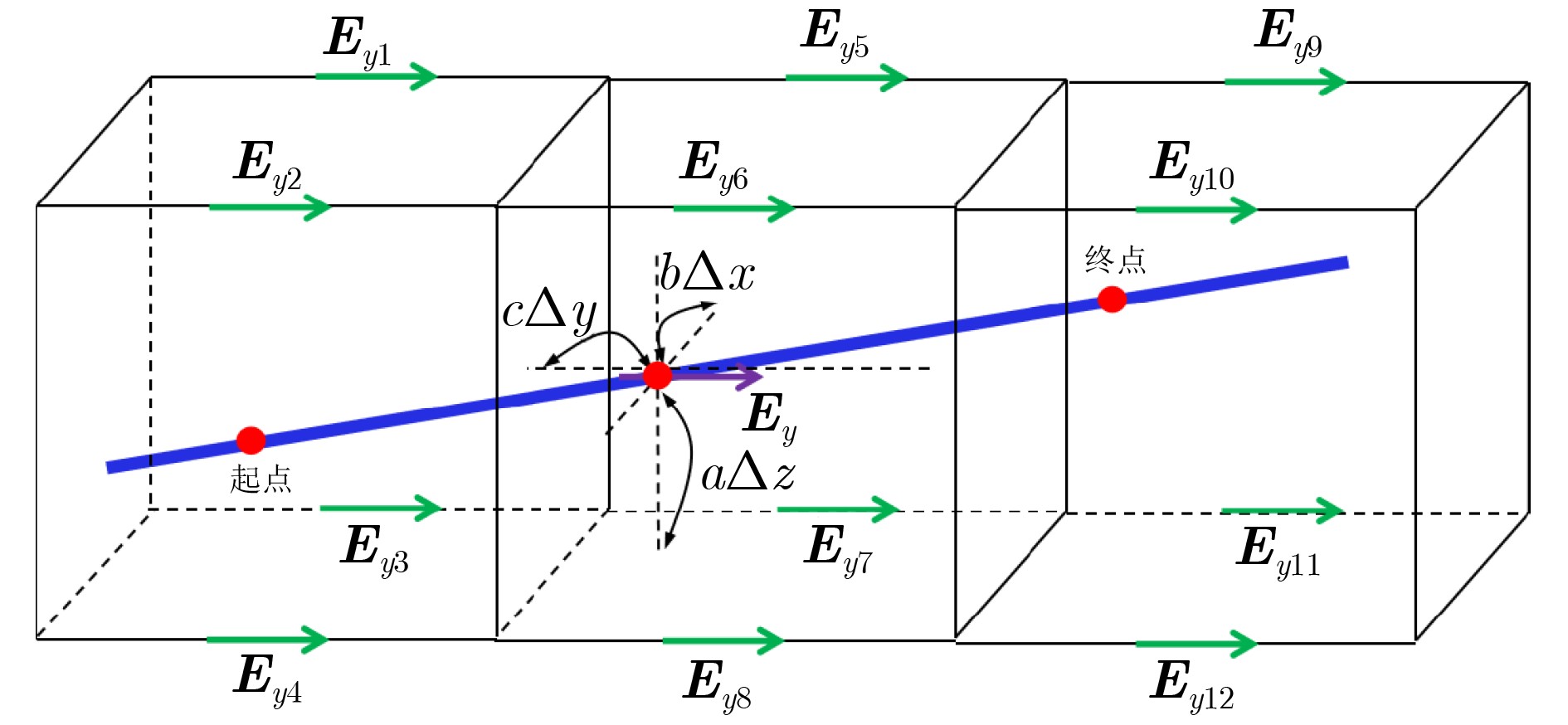
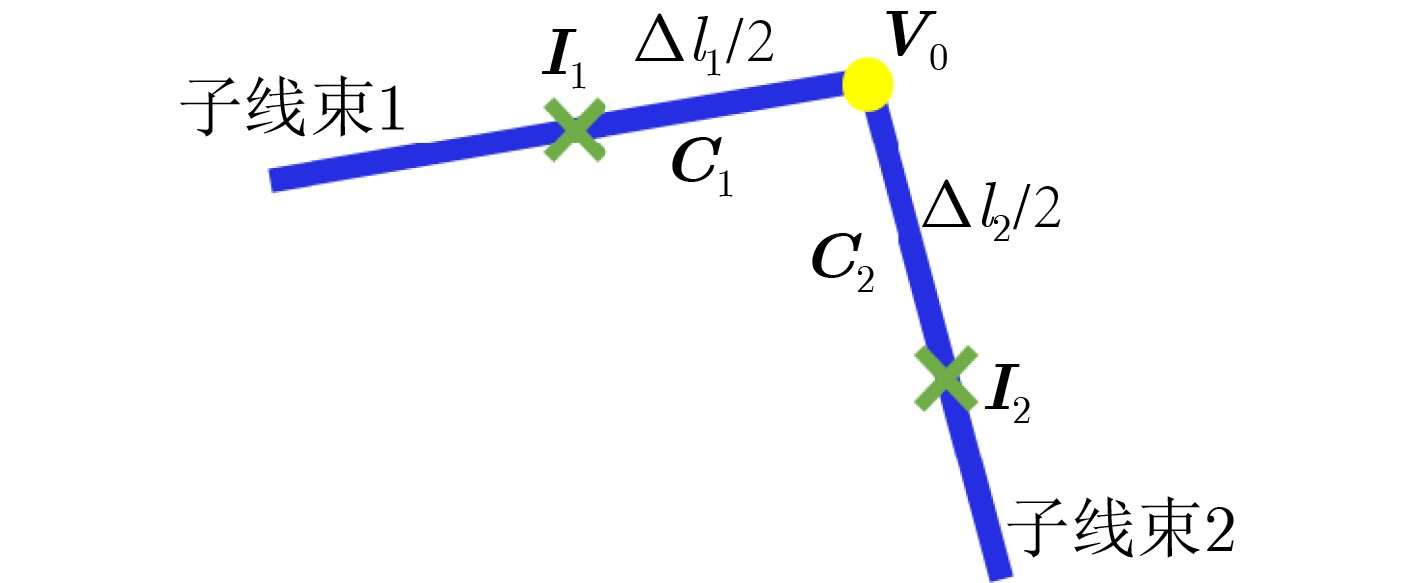
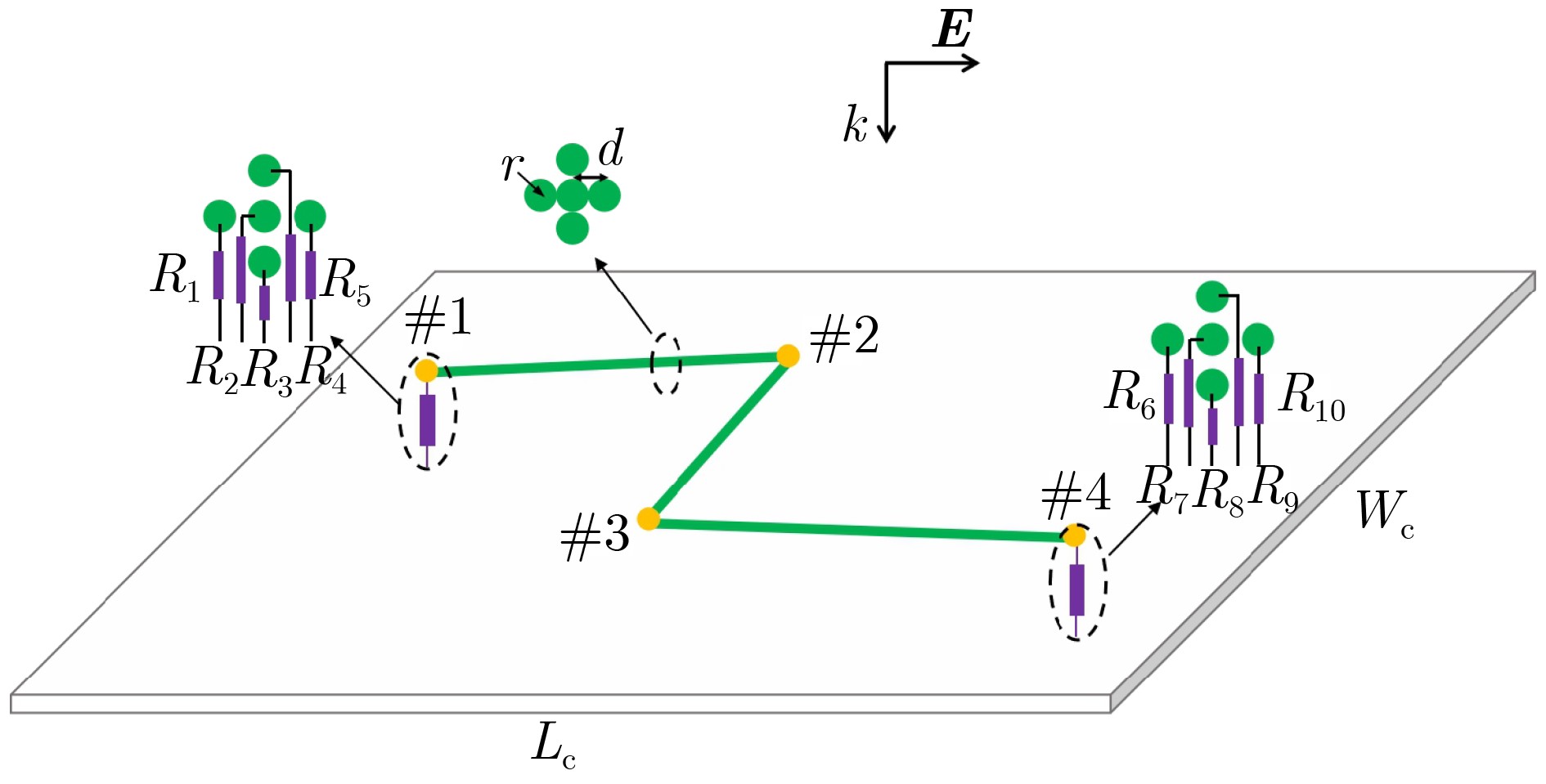
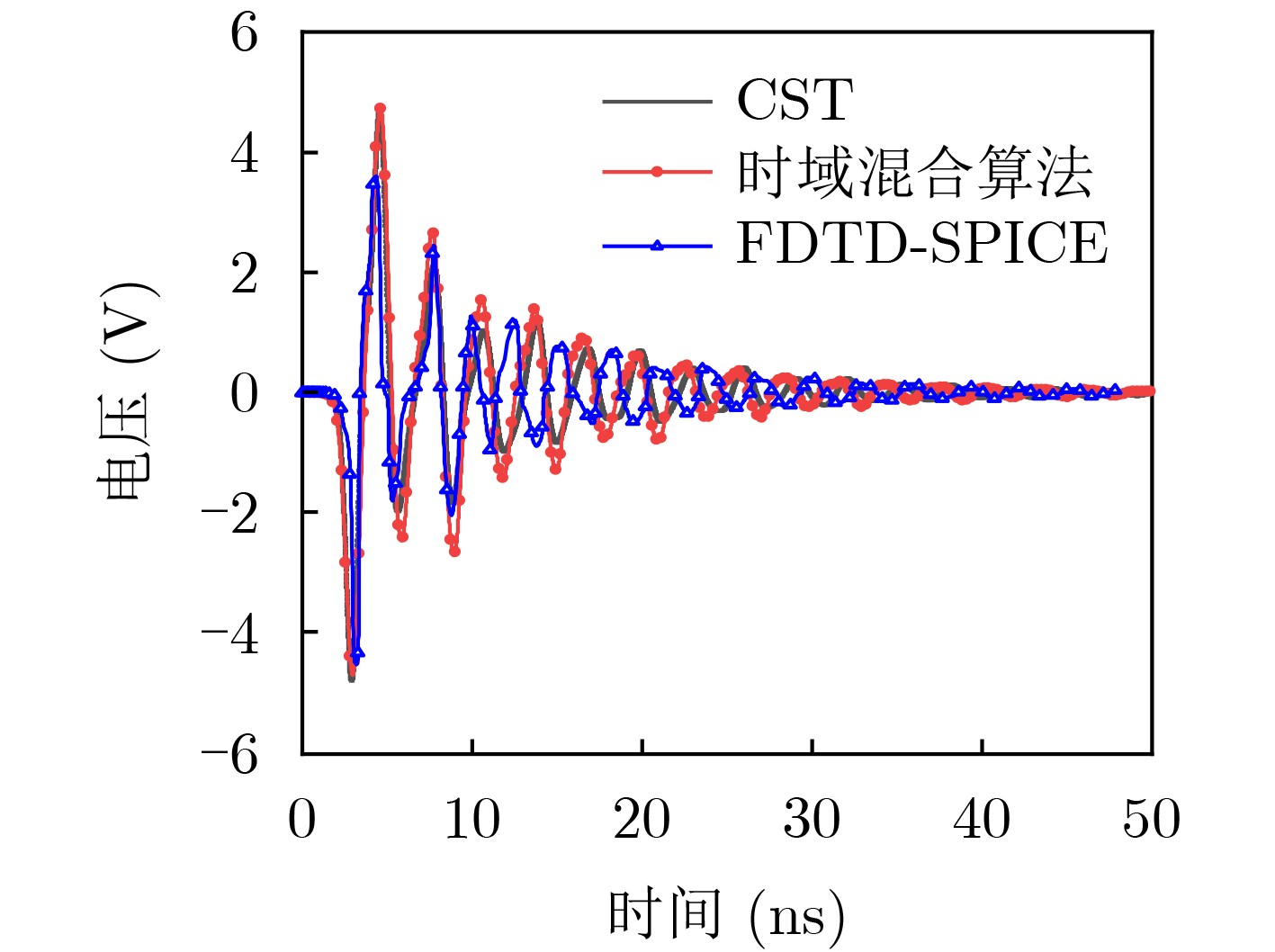
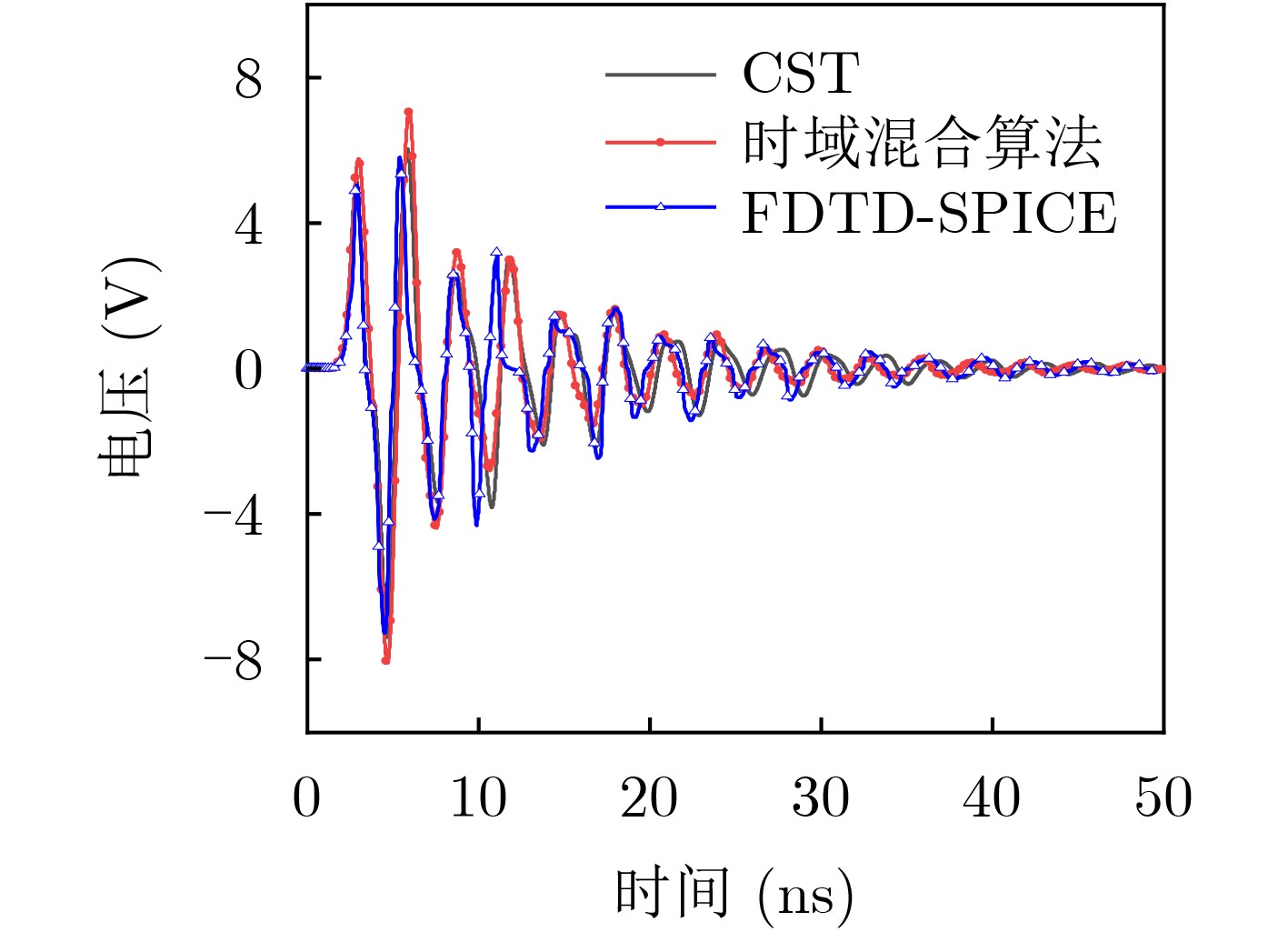
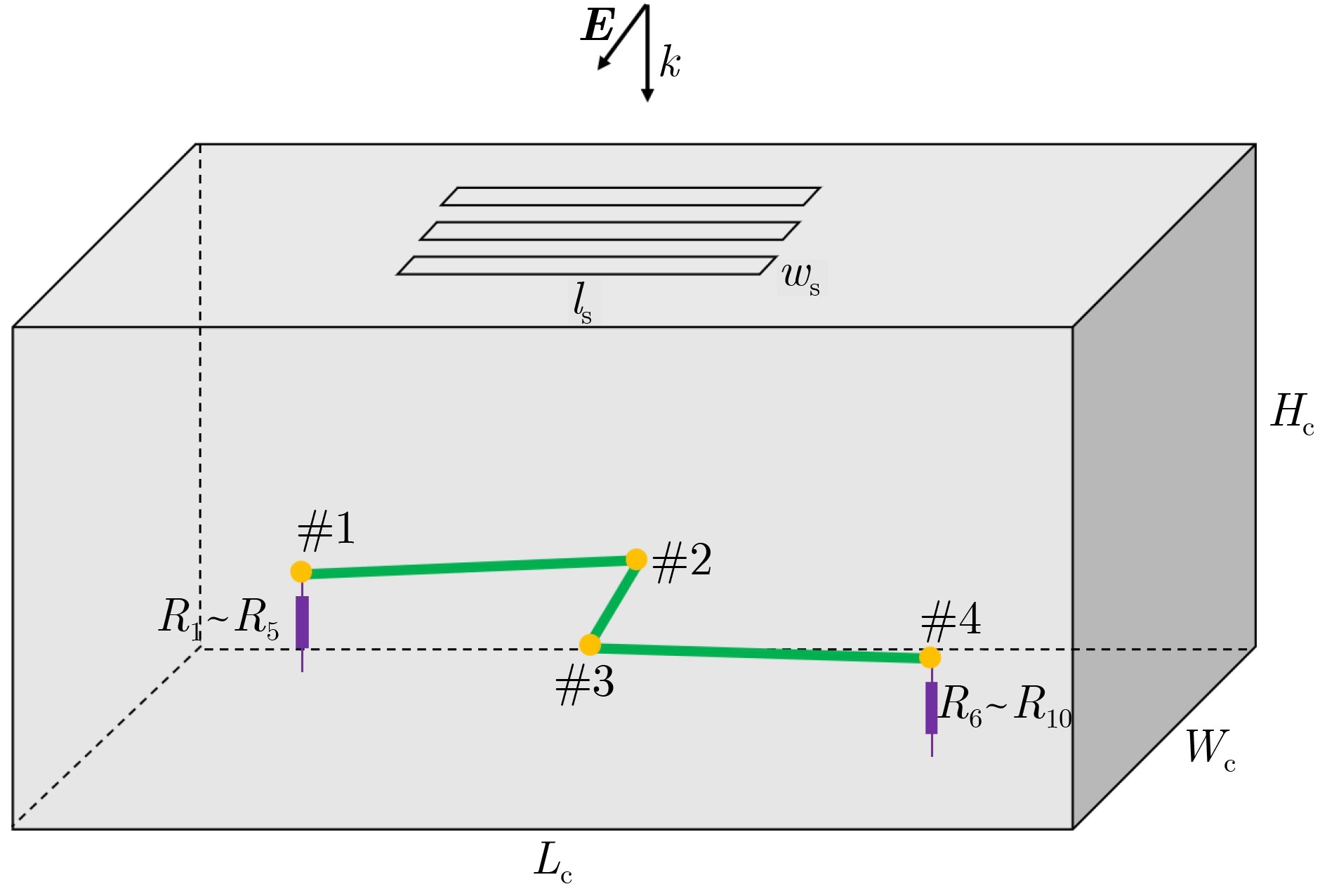
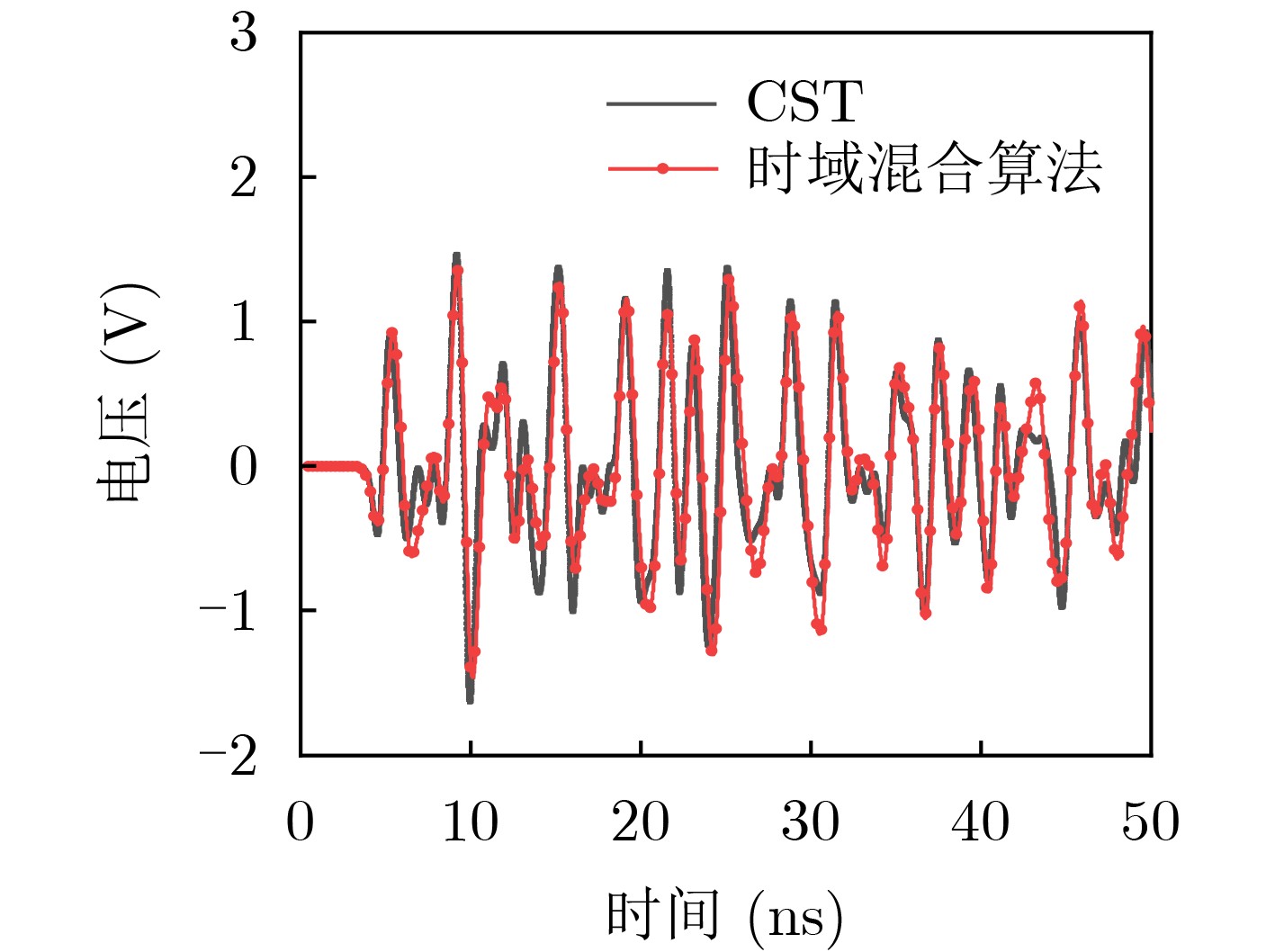
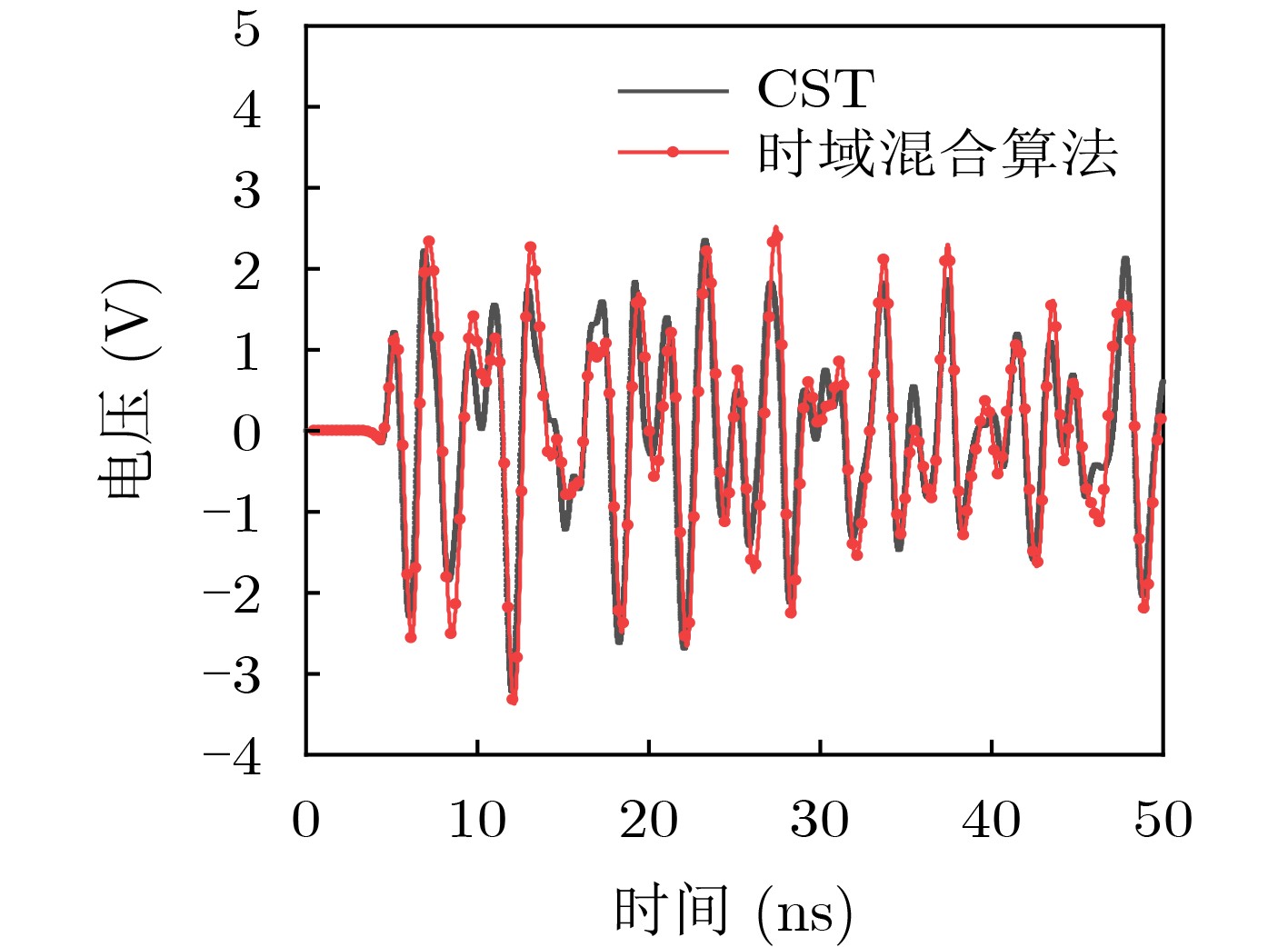
摘要: 受复杂系统布线空间的制约,线缆通常为线束结构,并呈现弯折和空间立体分布形态。目前,针对立体弯折线缆线束(BSCs)的电磁耦合,仍缺乏高效的时域建模分析方法。因此,该文基于时域有限差分(FDTD)方法和传输线(TL)方程,提出自适应线缆网格技术,结合高效插值技术和电荷守恒定律,研究了一种高效的时域混合算法,实现立体弯折线缆线束的电磁耦合时域快速同步计算。首先,将立体弯折线束整体结构按照弯折节点分解成多段独立的子线束。然后,基于传输线方程和FDTD方法,结合自适应线缆网格技术和插值技术,构建各段空间立体分布的子线束电磁耦合模型,并求解得到线束沿线各点的瞬态响应。最后,根据电荷守恒定律,构建弯折节点的等效电路模型并求解得到节点处的电压,实现各段子线束之间的干扰信号传输。通过理想导电板上和屏蔽机箱内立体弯折线束电磁耦合的数值模拟,从计算精度和耗用时间方面与CST和FDTD-SPICE的仿真结果进行对比,验证所提方法的正确性和高效性。
-
关键词:
- 立体弯折线缆线束 /
- 自适应线缆网格技术 /
- 插值技术 /
- 电荷守恒 /
- 时域有限差分与传输线方程的混合算法
Abstract: Restricted to the spatial layout of complex systems, the cables used in these systems are usually harness structures, and have bent and stereoscopic configurations. At present, efficient time-domain modeling and analysis methods for the coupling of harness cable with Bent and Stereoscopic Configurations (BSCs) are still rare. Therefore, an efficient time-domain hybrid method, consisting of the Finite Difference Time Domain (FDTD) method, Transmission Line (TL) equations, adaptive cable mesh technique, interpolation techniques and charge conservation law, is studied to achieve the fast and synchronous calculations of space electromagnetic field radiation and the coupling responses of harness cable with BSCs. Firstly, the structure of the harness cable with BSCs is decomposed into multiple independent sub harness cable according to the bending nodes. Then, the coupling model of each sub harness cable is constructed by the TL equations, in which the adaptive cable mesh technique and some interpolation techniques are employed to compute the distribution sources of the TL equations, and the FDTD is applied to solve the transient responses on the sub harness cable. Finally, the equivalent circuit model of the bending nodes are constructed by the charge conservation law, and the voltages at the nodes are solved and fed back to these sub harness cables to realize the interference signal transmission between these cables. To verify the accuracy and efficiency of the proposed method, two coupling problems of the harness cable with BSCs in the environments of free space and shielding enclosure are solved by this method, CST and Finite Difference Time Domain-Simulation Program with Integrated Circuit Emphasis (FDTD-SPICE) method, which are compared in the calculation precision and time consumption. -
表 1 算例1的时域混合算法与CST和FDTD-SPICE所需网格量和计算时间
数值方法 网格量 计算时间(min) 时域混合算法 6.84×105 2.4 CST 2.7×106 3.3 FDTD-SPICE 6.84×105 2.6  下载: 导出CSV
下载: 导出CSV
-
[1] ANDRIEU G, KONÉ L, BOCQUET F, et al. Multiconductor reduction technique for modeling common-mode currents on cable bundles at high frequency for automotive applications[J]. IEEE Transactions on Electromagnetic Compatibility, 2008, 50(1): 175–184. doi: 10.1109/TEMC.2007.911914 [2] LI Zhuo, LIU Liangliang, DING Ji, et al. A new simplification scheme for crosstalk prediction of complex cable bundles within a cylindrical cavity[J]. IEEE Transactions on Electromagnetic Compatibility, 2012, 54(4): 940–943. doi: 10.1109/TEMC.2012.2200042 [3] LI Zhuo, LIU Liangliang, YAN Jian, et al. An efficient simplification scheme for modeling crosstalk of complex cable bundles above an orthogonal ground plane[J]. IEEE Transactions on Electromagnetic Compatibility, 2013, 55(5): 975–978. doi: 10.1109/TEMC.2012.2237033 [4] 高印寒, 安占扬, 王举贤, 等. 等效线束法在汽车线束时域辐射敏感度分析中的应用[J]. 吉林大学学报:工学版, 2015, 45(3): 946–952. doi: 10.13229/j.cnki.jdxbgxb201503038GAO Yinhan, AN Zhanyang, WANG Juxian, et al. Application of equivalent cable bundle method in time domain radiation sensitivity of automotive cable harness[J]. Journal of Jilin University:Engineering and Technology Edition, 2015, 45(3): 946–952. doi: 10.13229/j.cnki.jdxbgxb201503038 [5] XIE Li and LEI Yinzhao. Transient response of a multiconductor transmission line with nonlinear terminations excited by an electric dipole[J]. IEEE Transactions on Electromagnetic Compatibility, 2009, 51(3): 805–810. doi: 10.1109/TEMC.2009.2023327 [6] 尹名初, 杜平安. 开孔屏蔽腔内传输线负载所受电磁干扰的解析算法[J]. 强激光与粒子束, 2016, 28(12): 123201. doi: 10.11884/HPLPB201628.160421YIN Mingchu and DU Ping’an. Analytic formulation for load response of transmission line enclosed in enclosure with apertures[J]. High Power Laser and Particle Beams, 2016, 28(12): 123201. doi: 10.11884/HPLPB201628.160421 [7] 任丹, 杜平安, 陈珂, 等. 基于模式匹配及BLT方程的腔体内场线耦合计算方法研究[J]. 电子与信息学报, 2017, 39(8): 2014–2018. doi: 10.11999/JEIT161101REN Da, DU Ping’an, CHEN Ke, et al. Analytic method based on mode matching and BLT equation for field to wire coupling in an enclosure[J]. Journal of Electronics &Information Technology, 2017, 39(8): 2014–2018. doi: 10.11999/JEIT161101 [8] 王怡, 张馨丹, 甄琦, 等. 平面波照射下贯通导线电磁干扰快速算法[J]. 电波科学学报, 2019, 34(4): 429–435. doi: 10.13443/j.cjors.2018111902WANG Yi, ZHANG Xindan, ZHEN Qi, et al. Fast algorithm of plane wave coupling to transmission lines penetrating through metallic enclosure[J]. Chinese Journal of Radio Science, 2019, 34(4): 429–435. doi: 10.13443/j.cjors.2018111902 [9] 李春荣, 李帅, 王新政, 等. 电磁脉冲与微带线耦合效应的数值模拟[J]. 微波学报, 2013, 29(2): 66–70. doi: 10.14183/j.cnki.1005-6122.2013.02.020LI Chunrong, LI Shuai, WANG Xinzheng, et al. Numerical simulation on coupling effects of electromagnetic pulse onto microstrip line[J]. Journal of Microwave, 2013, 29(2): 66–70. doi: 10.14183/j.cnki.1005-6122.2013.02.020 [10] 谢海燕, 李勇, 宣春, 等. 不同频率高功率微波辐照下PCB电路的混合模拟[J]. 强激光与粒子束, 2016, 28(3): 033016. doi: 10.11884/HPLPB201628.033016XIE Haiyan, LI Yong, XUAN Chun, et al. Mixed simulation of PCB circuit illuminated by high power microwave with different frequencies[J]. High Power Laser and Particle Beams, 2016, 28(3): 033016. doi: 10.11884/HPLPB201628.033016 [11] CHEN Hongcai, DU Yaping, YUAN Mengqing, et al. Lightning-induced voltages on a distribution line with surge arresters using a hybrid FDTD-SPICE method[J]. IEEE Transactions on Power Delivery, 2018, 33(5): 2354–2363. doi: 10.1109/TPWRD.2017.2788046 [12] 叶志红, 苟丹, 吴小林, 等. 传输线端接复杂电路的电磁耦合时域分析方法[J]. 电子与信息学报, 2021, 43(1): 242–248. doi: 10.11999/JEIT191026YE Zhihong, GOU Dan, WU Xiaolin, et al. Time domain analysis method for the coupling problem of transmission lines terminated with complex circuits[J]. Journal of Electronics &Information Technology, 2021, 43(1): 242–248. doi: 10.11999/JEIT191026 [13] WEI Jinhong, YAN Youjie, WANG Shengtao, et al. FDTD-TL method for the prediction of the transient response of shielded cable above the ground[C]. 2021 International Applied Computational Electromagnetics Society (ACES-China) Symposium, Chengdu, China, 2021: 1–2. [14] 许杰, 徐珂, 黄志祥. 一种新型的高阶时域有限差分方法[J]. 电子与信息学报, 2020, 42(2): 425–429. doi: 10.11999/JEIT190050XU Jie, XU Ke, and HUANG Zhixiang. A new high order finite difference time domain method[J]. Journal of Electronics &Information Technology, 2020, 42(2): 425–429. doi: 10.11999/JEIT190050 [15] YE Zhihong, WU Xiaolin, and ZHANG Jie. Time domain hybrid method for the coupling analysis of oblique transmission line network excited by ambient wave[J]. IEEE Transactions on Electromagnetic Compatibility, 2020, 62(6): 2450–2457. doi: 10.1109/TEMC.2020.2982430 [16] MENG Xuesong, BAO Xianfeng, ZHENG Yuteng, et al. An efficient modeling technique for time domain field-to-wire coupling in the massively parallel computer codes JEMS-FDTD[C]. 2019 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Guangzhou, China, 2019: 1–3. [17] MENG Xuesong, BAO Xianfeng, ZHENG Yuteng, et al. Time-domain modeling of field-to-wire coupling in obliquely oriented multiwire cables with junctions using JEMS-FDTD[J]. IEEE Transactions on Electromagnetic Compatibility, 2020, 62(6): 2458–2467. doi: 10.1109/TEMC.2020.2968076 [18] ROTGERINK J L, SERRA R, and LEFERINK F. Multiconductor transmission line modeling of crosstalk between cables in the presence of composite ground planes[J]. IEEE Transactions on Electromagnetic Compatibility, 2021, 63(4): 1231–1239. doi: 10.1109/TEMC.2020.3040689 -

 下载:
下载:



图(11) / 表(2)
计量
- 文章访问数: 840
- HTML全文浏览量: 660
- PDF下载量: 142
- 被引次数: 0
