

A Design Method for Analog Predistortion Circuit of K-band TWT
-
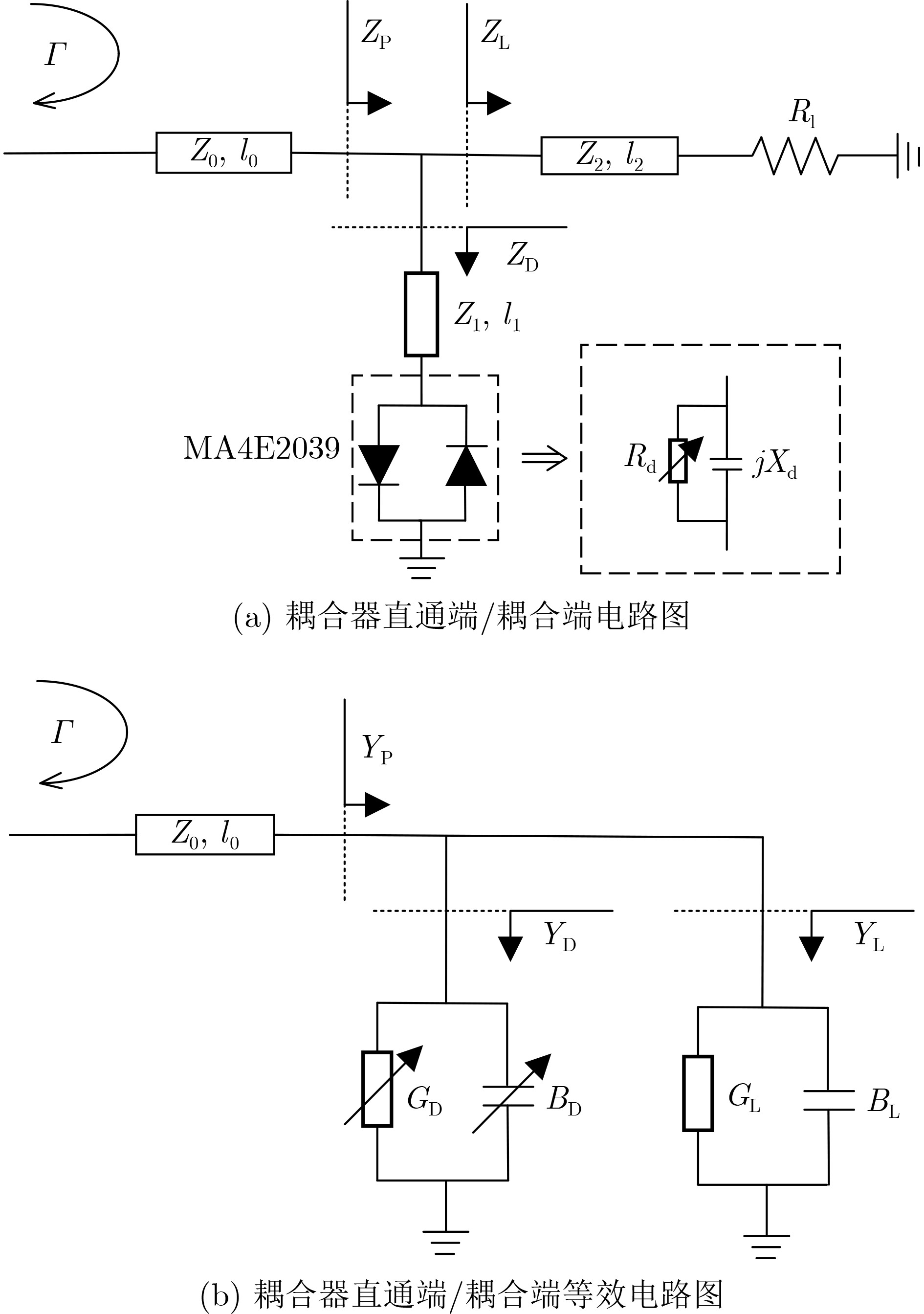
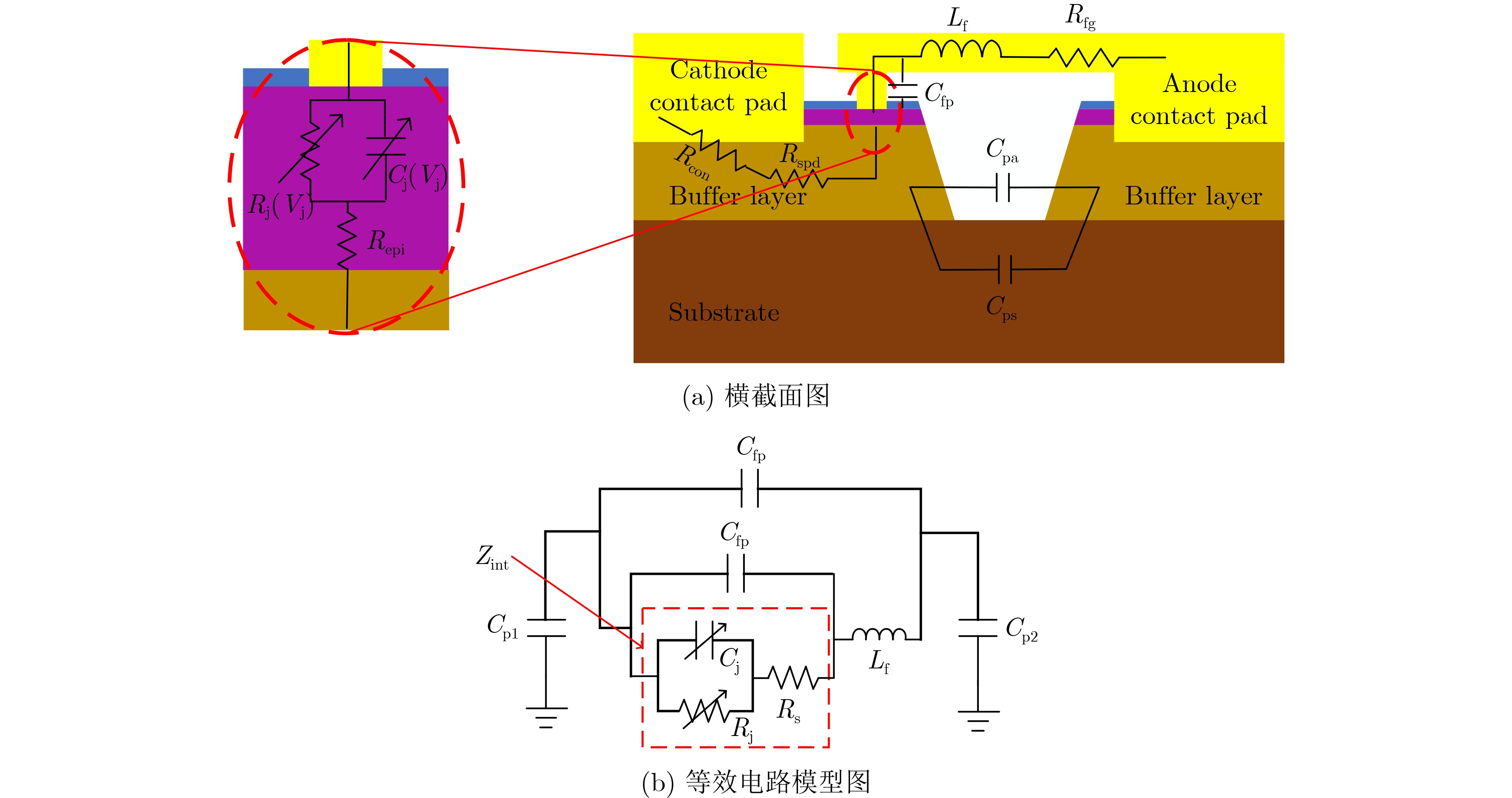
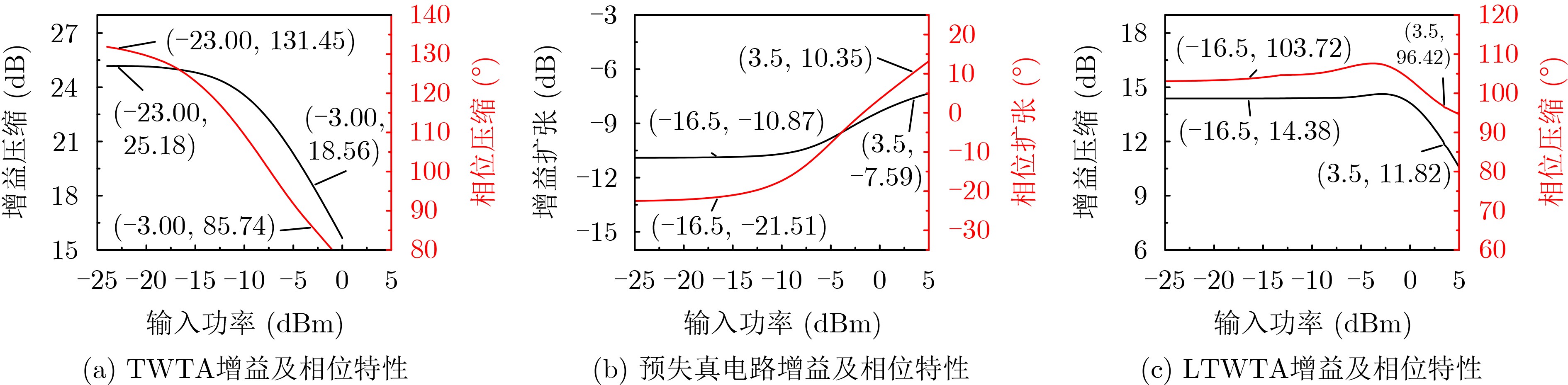
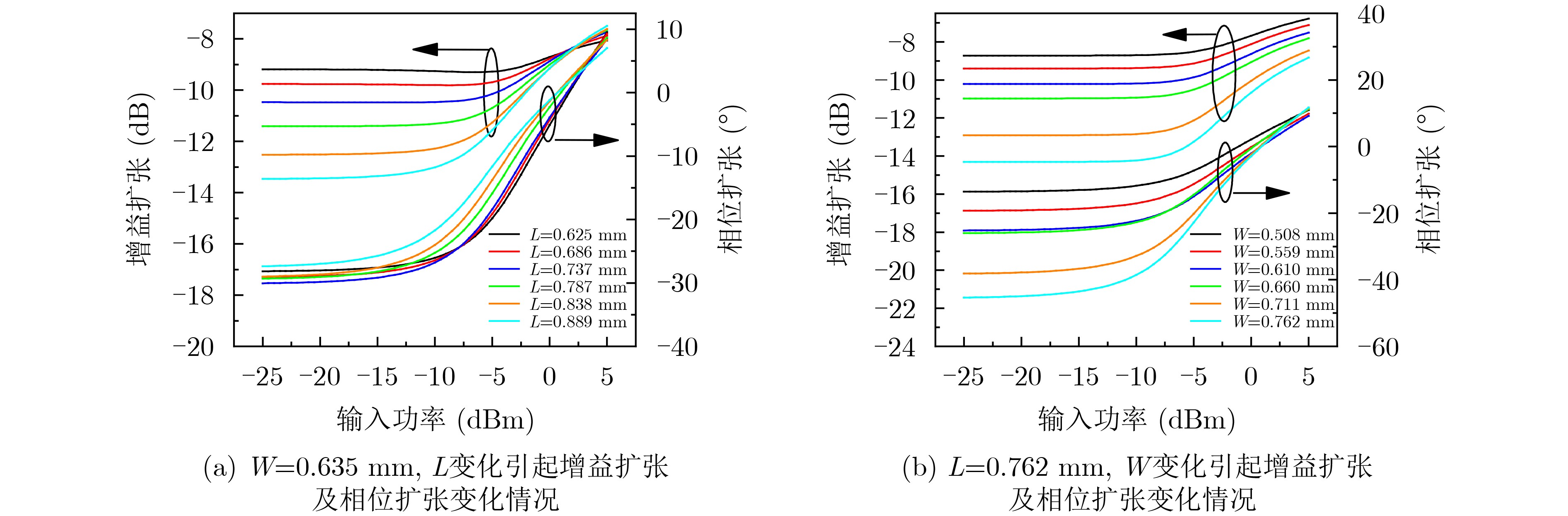
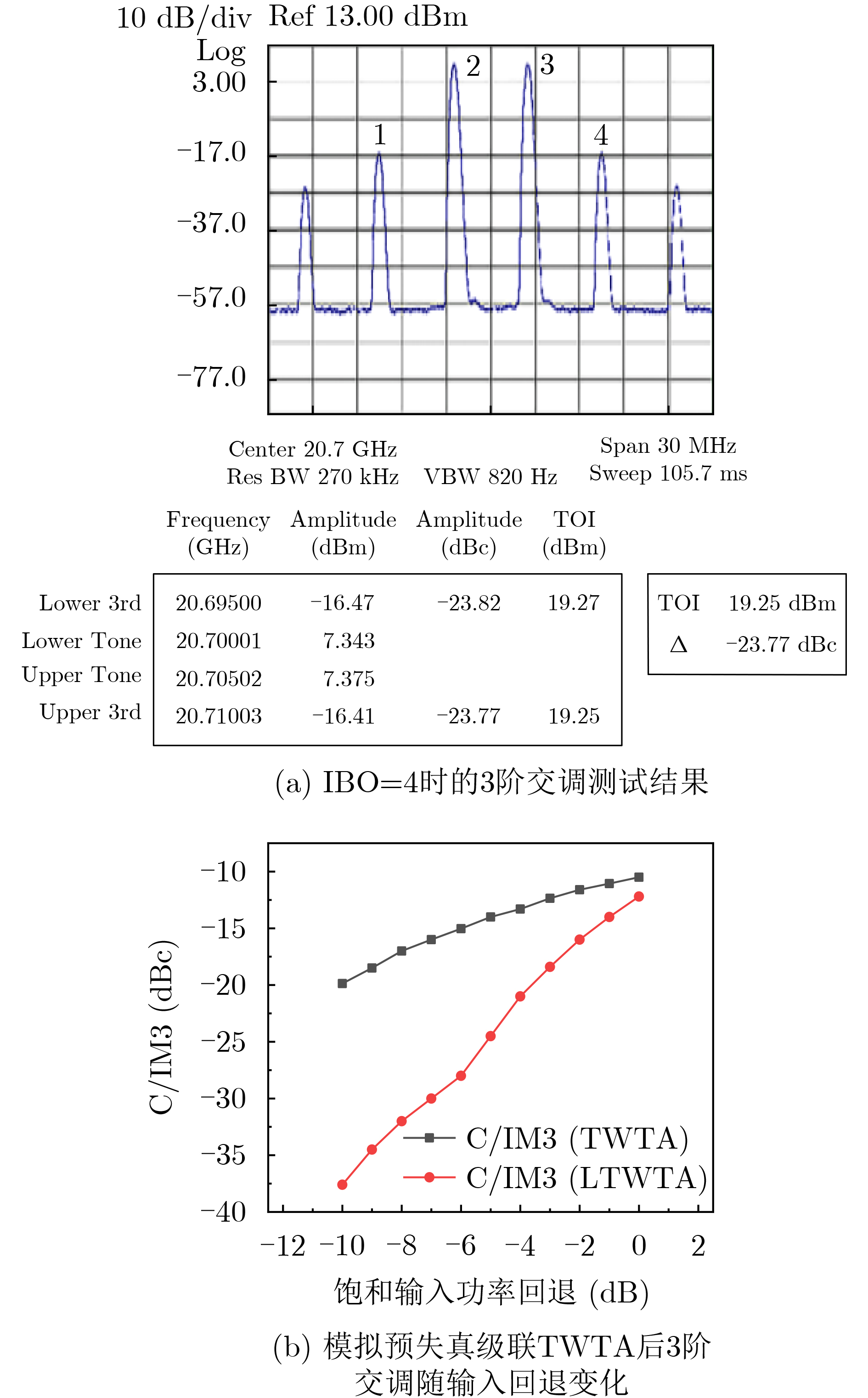
摘要: 空间行波管(TWT)预失真电路小型化、轻量化要求使得电路调试难度变大,迫切需要一种预失真电路精确仿真及设计方法来指导产品设计。该文在分析肖特基二极管等效电路模型基础上选择二极管MA4E2039作为非线性发生器件,并建立了MA4E2039的二极管仿真模型。之后通过分析反射式预失真电路结构,获得了影响电路性能的关键参数,并在元器件和版图联合仿真阶段对这些关键参数进行精确仿真。最后对依据仿真结果进行加工的预失真电路进行测试,发现仿真结果和电路实测结果偏差小于15%,将预失真电路与K波段行波管放大器级联实现在输入回退4 dB时3阶交调达到23.77 dBc,实现了行波管的线性化。可见该方法能够用于指导空间行波管预失真电路设计,帮助提高产品开发周期,对于预失真电路的小型化设计也有重要指导意义。Abstract: The requirement of miniaturization and lightweight of space Travelling Wave Tube (TWT) predistortion circuit makes the circuit debugging more difficult. Therefore, an accurate simulation and design method of predistortion circuit is urgently needed to guide the product design. Based on the analysis of Schottky diode equivalent circuit model, the diode MA4E2039 is selected as a nonlinear generator, and the diode simulation model of MA4E2039 is established. Then, the key parameters affecting the performance of the circuit are obtained by analyzing the structure of the reflective predistortion circuit, and these key parameters are simulated accurately in the co-simulation stage of components and layout. Finally, the pre-distortion circuit processed according to the simulation results is tested, and it is found that the deviation between the simulation results and the measured results is less than 15%. By cascading the predistortion circuit with the K-band TWTA, the third-order intermodulation reaches 23.77 dBc while the IBO=4 dB. Therefore, this method can be used to guide the design of pre-distortion circuit of space TWT, help to improve the product development cycle, and also has important guiding significance for the miniaturization design of pre-distortion circuit.
-
表 1 MA4E2039单个二极管本征模型关键参数
参数 单位 含义 值 IS A 反向饱和电流 9.5e-14 RS $\Omega $ 串联电阻 5.1 N – 发射系数 1.16 CJ0 pF 零偏结电容 0.025 M – 分级系数 0.5 EG eV 能带宽度 1.43 FC – 正偏耗尽层电容系数 0.5 TT s 渡越时间 1e-11 VJ V 结电势 0.7 BV V 反向击穿电压 7 IBV A 反向击穿电压下电流 1e-5 XTI – 饱和电流温度系数 2  下载: 导出CSV
下载: 导出CSV
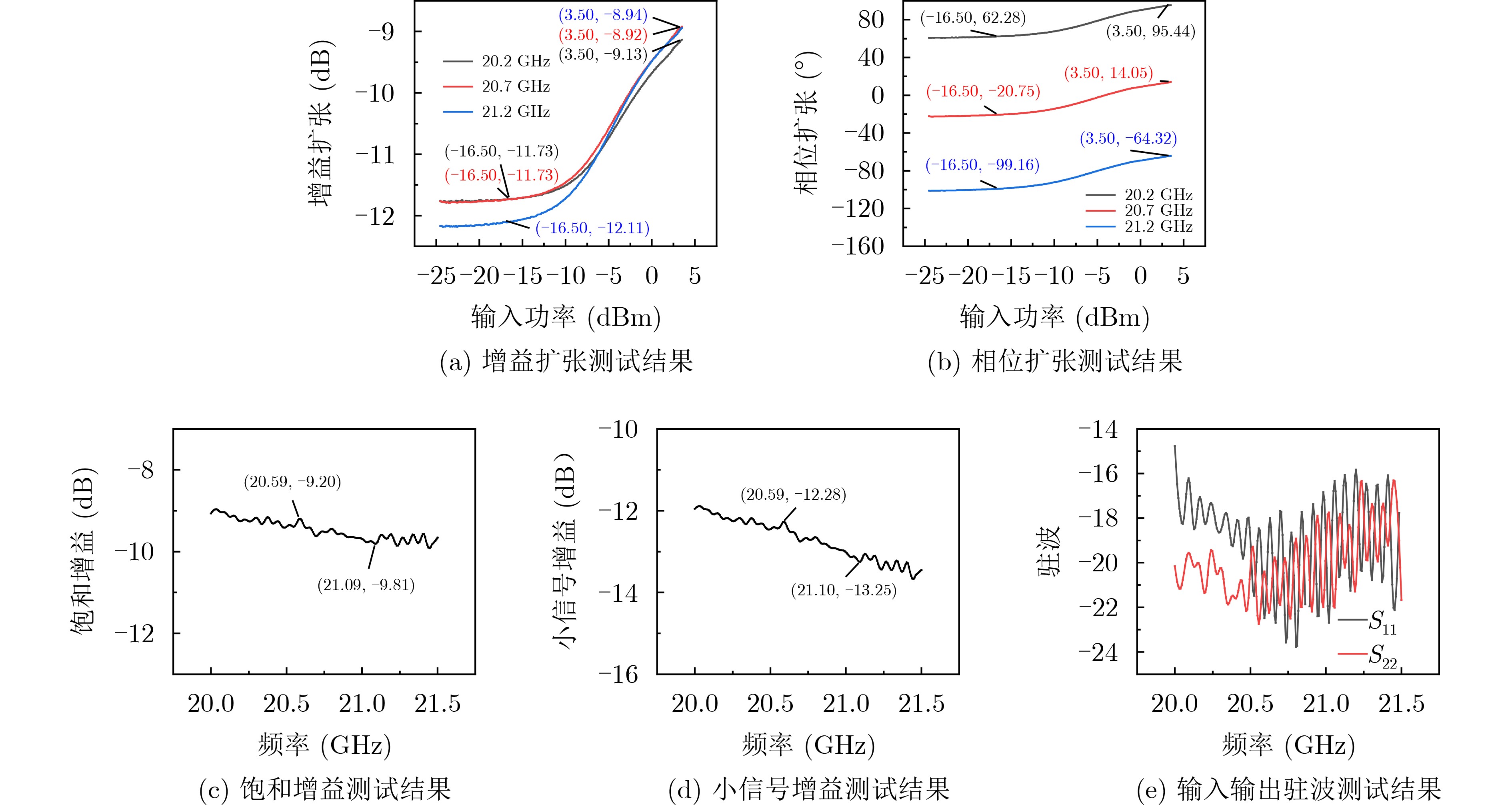
表 2 预失真电路仿真及实测指标比对
项目 20.2 GHz 20.7 GHz 21.2 GHz 偏差(%) 仿真 实测 仿真 实测 仿真 实测 饱和输入功率(dBm) 3.50 3.50 3.50 3.50 3.50 3.50 / 直流电压(V) 1.75 1.75 1.75 1.75 1.75 1.75 / 增益扩张(dB) 2.28 2.60 2.86 2.81 3.60 3.17 ≤12 相位扩张(°) 29.63 33.16 34.00 34.80 36.12 34.84 ≤12 饱和增益(dB) –7.81 –9.13 –7.96 –8.92 –8.00 –8.94 ≤15 小信号增益(dB) –10.09 –11.73 –10.82 –11.73 –11.60 –12.11 ≤13
下载: 导出CSV
-
[1] KATZ A, GRAY R, and DORVAL R. Linearizers for Q- and V-band TWTAs[J]. IEEE Transactions on Electron Devices, 2018, 65(6): 2371–2377. doi: 10.1109/TED.2018.2806199 [2] KENINGTON P B. High-Linearity RF Amplifier Design[M]. Boston: Artech House, 2000: 33. [3] KATZ A. TWTA linearization[J]. Microwave Journal, 1996, 39(4): 78, 80, 85-86, 88–90. [4] VILLEMAZET J F, YAHI H, LEFEBVRE B, et al. New Ka-band analog predistortion linearizer allowing a 2.9GHz instantaneous wideband satellite operation[C]. 2017 12th European Microwave Integrated Circuits Conference, Nuremberg, Germany, 2017: 302–305. [5] 刘洁, 胡波雄, 王刚, 等. 一种两支路行波管预失真线性化电路[J]. 电子测量技术, 2014, 37(4): 12–14,32. doi: 10.19651/j.cnki.emt.2014.04.004LIU Jie, HU Boxiong, WANG Gang, et al. A kind of two-branches predistortion linearizer for TWTA[J]. Electronic Measurement Technology, 2014, 37(4): 12–14,32. doi: 10.19651/j.cnki.emt.2014.04.004 [6] 周斌, 黄微波, 范培云. 一种应用于Ka频段空间行波管放大器的宽带线性化器[J]. 真空电子技术, 2014(3): 65–67. doi: 10.3969/j.issn.1002-8935.2014.03.019ZHOU Bin, HUANG Weibo, and FAN Peiyun. A broadband linearizer for Ka band satellite TWTA[J]. Vacuum Electronics, 2014(3): 65–67. doi: 10.3969/j.issn.1002-8935.2014.03.019 [7] 鲍鑫, 张德伟, 邓海林, 等. 新型Ka波段模拟预失真线性化器[J]. 信息工程大学学报, 2018, 19(3): 297–300. doi: 10.3969/j.issn.1671-0673.2018.03.008BAO Xin, ZHANG Dewei, DENG Hailin, et al. New Ka-B and analog predistortion linearizer[J]. Journal of Information Engineering University, 2018, 19(3): 297–300. doi: 10.3969/j.issn.1671-0673.2018.03.008 [8] 熊杰, 方龑, 辜文婷, 等. 一种星载Ka频段宽带线性化器设计[J]. 空间电子技术, 2019, 16(4): 12–16. doi: 10.3969/j.issn.1674-7135.2019.04.003XIONG Jie, FANG Yan, GU Wenting, et al. A design of Ka-broadband linearizer[J]. Space Electronic Technology, 2019, 16(4): 12–16. doi: 10.3969/j.issn.1674-7135.2019.04.003 [9] 李宝建, 瞿波, 夏雷, 等. Q波段宽频带线性化器设计[J]. 强激光与粒子束, 2021, 33(2): 023004. doi: 10.11884/HPLPB202133.200206LI Baojian, QU Bo, XIA Lei, et al. Design of Q-band wideband linearizer[J]. High Power Laser and Particle Beams, 2021, 33(2): 023004. doi: 10.11884/HPLPB202133.200206 [10] 刘正, 刘刚, 李琦. 小型化星载模拟预失真器的研制[J]. 中国空间科学技术, 2019, 39(5): 55–60. doi: 10.16708/j.cnki.1000-758X.2019.0040LIU Zheng, LIU Gang, and LI Qi. Design of a compact satellite analog predistortion circuit[J]. Chinese Space Science and Technology, 2019, 39(5): 55–60. doi: 10.16708/j.cnki.1000-758X.2019.0040 [11] 周丽, 王超杰, 揭海, 等. 超宽带桥T型模拟线性化器设计[J]. 电子科技大学学报, 2020, 49(1): 98–101. doi: 10.12178/1001-0548.2019044ZHOU Li, WANG Chaojie, JIE Hai, et al. The design of an ultra-broadband bridge T analog linearizer[J]. Journal of University of Electronic Science and Technology of China, 2020, 49(1): 98–101. doi: 10.12178/1001-0548.2019044 [12] 谢小强, 吴健苇, 穆继超, 等. 一种基于共面线的毫米波宽带预失真线性化技术[J]. 上海航天, 2018, 35(4): 54–60. doi: 10.19328/j.cnki.1006-1630.2018.04.009XIE Xiaoqiang, WU Jianwei, MU Jichao, et al. Millimeter-wave wideband predistortion linearization technology based on coplanar line[J]. Aerospace Shanghai, 2018, 35(4): 54–60. doi: 10.19328/j.cnki.1006-1630.2018.04.009 [13] 邓海林, 陈会超, 周东方, 等. 一种补偿量可调的反射式预失真线性化器[J]. 真空科学与技术学报, 2018, 38(8): 657–662. doi: 10.13922/j.cnki.cjovst.2018.08.03DENG Hailin, CHEN Huichao, ZHOU Dongfang, et al. Design and evaluation of modified reflective predistortion linearizer with tunable compensation[J]. Chinese Journal of Vacuum Science and Technology, 2018, 38(8): 657–662. doi: 10.13922/j.cnki.cjovst.2018.08.03 [14] 邓海林, 张德伟, 白维达, 等. 一种行波管用毫米波射频预失真线性化器[J]. 电子学报, 2017, 45(7): 1784–1791. doi: 10.3969/j.issn.0372-2112.2017.07.032DENG Hailin, ZHANG Dewei, BAI Weida, et al. A millimeter-wave RF predistortion linearizer for travelling wave tube amplifier[J]. Acta Electronica Sinica, 2017, 45(7): 1784–1791. doi: 10.3969/j.issn.0372-2112.2017.07.032 -


 下载:
下载:




图(11) / 表(2)
计量
- 文章访问数: 1075
- HTML全文浏览量: 831
- PDF下载量: 108
- 被引次数: 0
