

Research on Adaptive Enhancement Method of Rehabilitation Training Participation Based on Bayesian Optimization
-
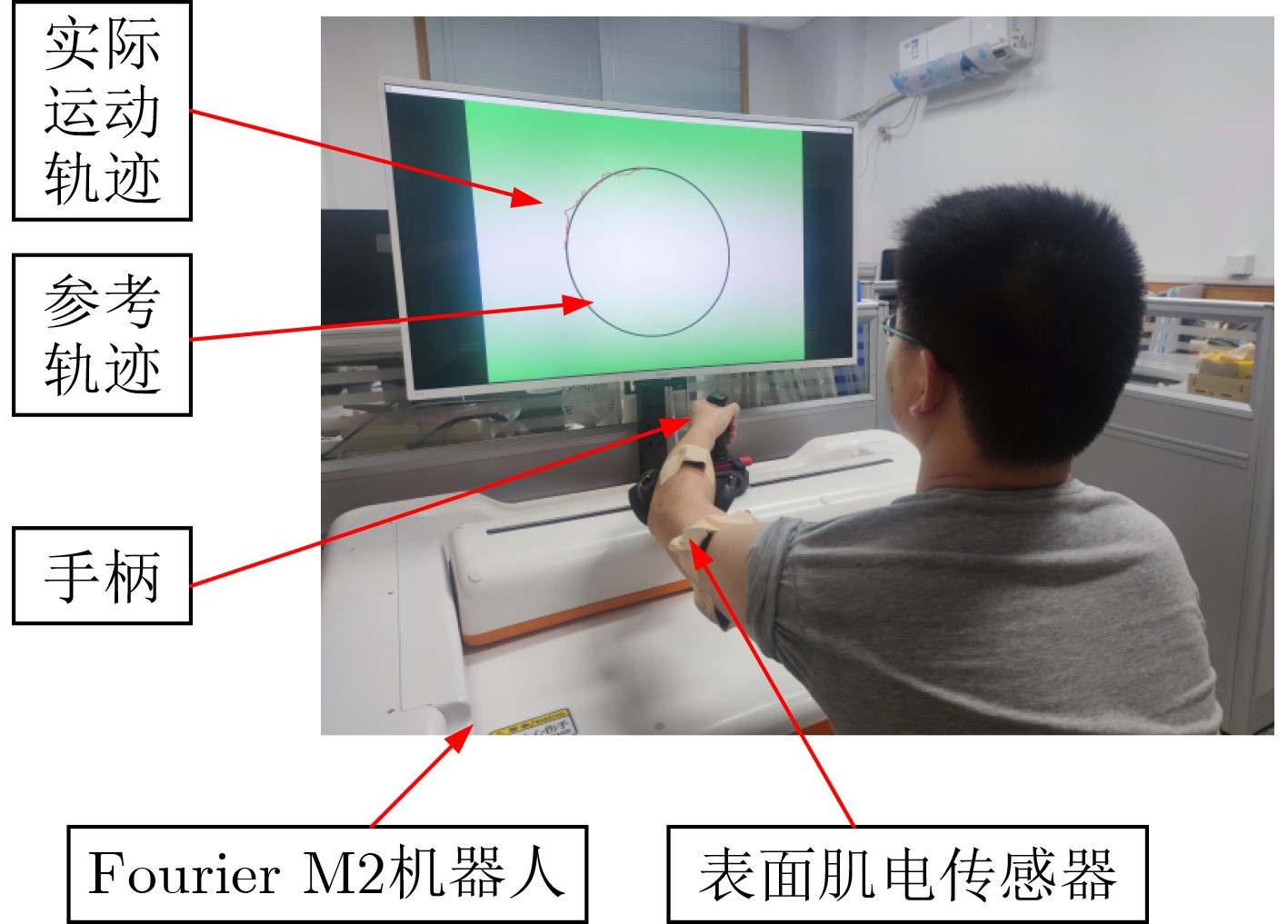
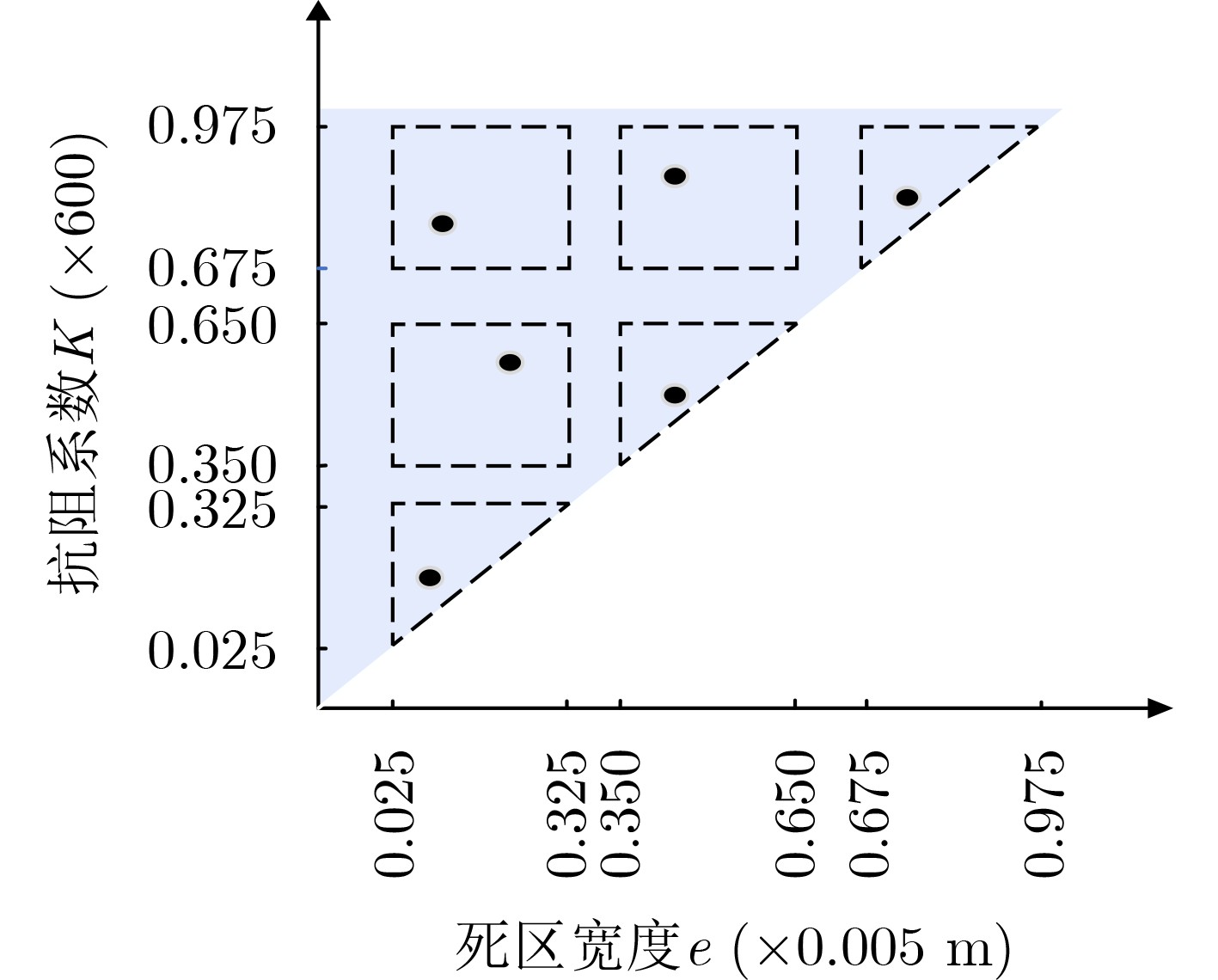
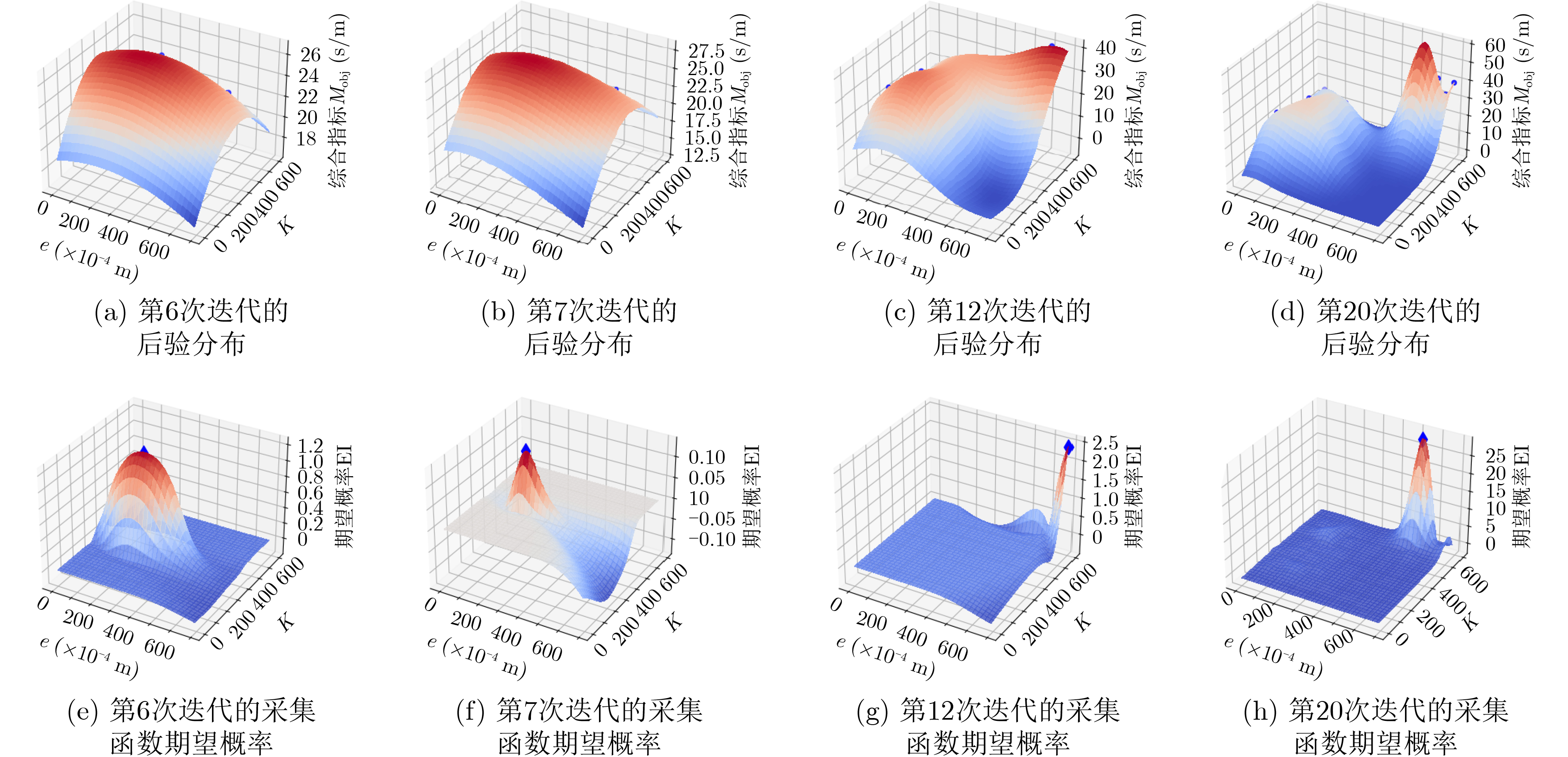
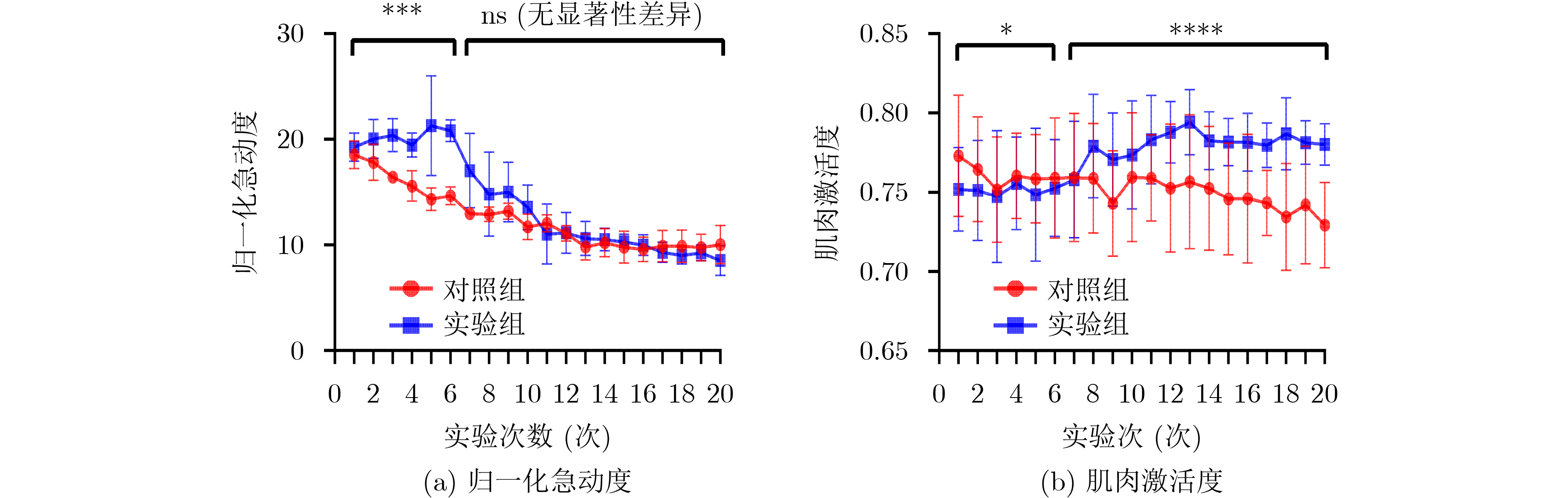
摘要: 针对现有的评估被试主动参与度指标建模复杂以及训练强度与被试运动能力及参与度不匹配等问题,该文提出一种基于贝叶斯优化的挑战型力控制器自适应增强康复训练参与度的方法。首先使用基于表面肌电信号(sEMG)表征的肌肉激活度来评估被试者的参与度,其次采用基于轨迹误差放大的抗阻训练模式进行上肢训练,并构建归一化急动度和肌肉激活度相结合的综合目标函数,然后采用贝叶斯优化方法在训练过程中更新挑战型力场的抗阻系数和死区宽度两个超参数,逐次优化该目标函数,以提高运动轨迹的顺滑度并保持被试者的训练参与度。最后,将16名健康被试者随机分为实验组和对照组并以其非利手进行训练,验证所提方法的有效性。实验结果表明,训练过程中实验组的肌肉激活度维持在高于对照组2.51%的水平;训练后实验组的运动能力改善明显优于对照组(59.8% vs 40.7%),验证了该文所提的自适应增强康复训练参与度策略比固定参数策略更有优势。Abstract: For the problems that the existing evaluation index of patient active engagement is complicated to model and training intensity does not match the exercise ability and participation of the participants. A challenge force controller based on Bayesian optimization to enhance adaptively the participation of rehabilitation training is proposed. Firstly, muscle activation based on surface ElectroMyoGram (sEMG) signal is used to evaluate the participant's participation. Secondly, the resistance training mode based on trajectory error amplification is used to train the upper limb, and a comprehensive objective function combining normalized intensity and muscle activation is constructed. Then, Bayesian optimization method is used to update the resistance coefficient and dead zone width of the challenge force field in each training, and optimize the objective function continuously to improve the smoothness of the motion trajectory, while maintaining the participants' participation in training. Finally, 16 healthy subjects are randomly divided into experimental group and control group and trained with their non-handedness to verify the effectiveness of the proposed method. The experimental results show that the muscle activation of the experimental group is 2.51% higher than that of the control group. After training, the improvement of exercise ability in the experimental group is significantly better than that in the control group (59.8% vs 40.7%), which verifies that the adaptive rehabilitation training engagement strategy proposed has more advantages than the fixed parameter strategy.
-
表 2 归一化急动度多重比较检验
多重比较检验 均值差 95%置信区间 P值 Pre_G对比Post_G 7.613 [5.834 , 9.392] <0.0001 Pre_G对比Pre_Y 0.461 [–1.318 , 2.240] 0.8790 Pre_G对比Post_Y 10.840 [9.061 , 12.620] <0.0001 Post_G对比Pre_Y –7.152 [–8.931 , –5.373] <0.0001 Post_G对比Post_Y 3.228 [1.449 , 5.007] 0.0005 Pre_Y对比Post_Y 10.380 [8.600 , 12.160] <0.0001  下载: 导出CSV
下载: 导出CSV
表 3 肌肉激活度多重比较检验
多重比较检验 均值差 95%置信区间 P值 Pre_G对比Post_G –0.009177 [–0.02105, 0.00270] 0.1625 Pre_G对比Pre_Y –0.003366 [–0.01524, 0.00851] 0.8485 Pre_G对比Post_Y –0.035720 [–0.04760, –0.02385] <0.0001 Post_G对比Pre_Y 0.005812 [–0.00607, 0.01769] 0.5172 Post_G对比Post_Y –0.026550 [–0.03842, –0.01467] <0.0001 Pre_Y对比Post_Y –0.032360 [–0.04423, –0.02048] <0.0001
下载: 导出CSV
-
[1] 《中国脑卒中防治报告》编写组. 《中国脑卒中防治报告2020》概要[J]. 中国脑血管病杂志, 2022, 19(2): 136–144. doi: 10.3969/j.issn.1672-5921.2022.02.011Report on Stroke Prevention and Treatment in China Writing Group. Brief report on stroke prevention and treatment in China, 2020[J]. Chinese Journal of Cerebrovascular Diseases, 2022, 19(2): 136–144. doi: 10.3969/j.issn.1672-5921.2022.02.011 [2] NICHOLSON-SMITH C, MEHRABI V, ATASHZAR S F, et al. A multi-functional lower- and upper-limb stroke rehabilitation robot[J]. IEEE Transactions on Medical Robotics and Bionics, 2020, 2(4): 549–552. doi: 10.1109/TMRB.2020.3034497 [3] NAJAFI M, ROSSA C, ADAMS K, et al. Using potential field function with a velocity field controller to learn and reproduce the therapist's assistance in robot-assisted rehabilitation[J]. IEEE/ASME Transactions on Mechatronics, 2020, 25(3): 1622–1633. doi: 10.1109/TMECH.2020.2981625 [4] MARCHAL-CRESPO L, MICHELS L, JAEGER L, et al. Effect of error augmentation on brain activation and motor learning of a complex locomotor task[J]. Frontiers in Neuroscience, 2017, 11: 526. doi: 10.3389/fnins.2017.00526 [5] CHOI G, LEE D, KANG I, et al. Effect of assistance timing in knee extensor muscle activation during sit-to-stand using a bilateral robotic knee exoskeleton[C]. 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Mexico, 2021: 4879–4882. [6] WANG Jiaxing, WANG Weiqun, REN Shixin, et al. Engagement enhancement based on human-in-the-loop optimization for neural rehabilitation[J]. Frontiers in Neurorobotics, 2020, 14: 596019. doi: 10.3389/fnbot.2020.596019 [7] DING Ye, KIM M, KUINDERSMA S, et al. Human-in-the-loop optimization of hip assistance with a soft exosuit during walking[J]. Science Robotics, 2018, 3(15): eaar5438. doi: 10.1126/scirobotics.aar5438 [8] WU Qingcong and CHEN Ying. Development of an intention-based adaptive neural cooperative control strategy for upper-limb robotic rehabilitation[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 335–342. doi: 10.1109/LRA.2020.3043197 [9] PENG Zengqi and HUANG Jian. Improved proxy-based sliding mode control integrated adaptive dynamic programming for pneumatic muscle actuators[C]. 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 2021: 424–429. [10] 彭亮, 侯增广, 王晨, 等. 康复辅助机器人及其物理人机交互方法[J]. 自动化学报, 2018, 44(11): 2000–2010. doi: 10.16383/j.aas.2018.c180209PENG Liang, HOU Zengguang, WANG Chen, et al. Physical interaction methods for rehabilitation and assistive robots[J]. Acta Automatica Sinica, 2018, 44(11): 2000–2010. doi: 10.16383/j.aas.2018.c180209 [11] YANG Tao and GAO Xueshan. Adaptive neural sliding-mode controller for alternative control strategies in lower limb rehabilitation[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2020, 28(1): 238–247. doi: 10.1109/TNSRE.2019.2946407 [12] REISMAN D S, MCLEAN H, KELLER J, et al. Repeated split-belt treadmill training improves poststroke step length asymmetry[J]. Neurorehabilitation and Neural Repair, 2013, 27(5): 460–468. doi: 10.1177/1545968312474118 [13] PORTA F, CELIAN C, and PATTON J L. Upper extremity functional rehabilitation for stroke survivors using error-augmented visual feedback: Interim results[C]. 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Mexico, 2021: 1318–1324. [14] PATTON J, SMALL S L, and ZEV RYMER W. Functional restoration for the stroke survivor: informing the efforts of engineers[J]. Topics in Stroke Rehabilitation, 2008, 15(6): 521–541. doi: 10.1310/tsr1506-521 [15] 舒智林, 李思宜, 于宁波, 等. 一种脑肢融合的神经康复训练在线评价与调整方法[J]. 自动化学报, 2022, 48(5): 1209–1219. doi: 10.16383/j.aas.c200452SHU Zhilin, LI Siyi, YU Ningbo, et al. A brain-limb fusion approach to online assessment and adjustment of rehabilitation trainings[J]. Acta Automatica Sinica, 2022, 48(5): 1209–1219. doi: 10.16383/j.aas.c200452 [16] EMKEN J L, BOBROW J E, and REINKENSMEYER D J. Robotic movement training as an optimization problem: Designing a controller that assists only as needed[C]. 9th International Conference on Rehabilitation Robotics, 2005. ICORR 2005, Chicago, USA, 2005: 307–312. [17] WOLBRECHT E T, CHAN V, LE V, et al. Real-time computer modeling of weakness following stroke optimizes robotic assistance for movement therapy[C]. 2007 3rd International IEEE/EMBS Conference on Neural Engineering, Kohala Coast, USA, 2007: 152–158. [18] TAHERI H, REINKENSMEYER D J, and WOLBRECHT E T. Model-based assistance-as-needed for robotic movement therapy after stroke[C]. 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, USA, 2016: 2124–2127. [19] CARMICHAEL M G and LIU Dikai. Estimating physical assistance need using a musculoskeletal model[J]. IEEE Transactions on Biomedical Engineering, 2013, 60(7): 1912–1919. doi: 10.1109/TBME.2013.2244889 [20] MARCHAL-CRESPO L and REINKENSMEYER D J. Review of control strategies for robotic movement training after neurologic injury[J]. Journal of NeuroEngineering and Rehabilitation, 2009, 6: 20. doi: 10.1186/1743-0003-6-20 [21] DUARTE J E and REINKENSMEYER D J. Effects of robotically modulating kinematic variability on motor skill learning and motivation[J]. Journal of Neurophysiology, 2015, 113(7): 2682–2691. doi: 10.1152/jn.00163.2014 [22] IBARRA J C P, DOS SANTOS W M, KREBS H I, et al. Adaptive impedance control for robot-aided rehabilitation of ankle movements[C]. 5th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 2014: 664–669. [23] DARZI A and NOVAK D. Using physiological linkage for patient state assessment in a competitive rehabilitation game[C]. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, Canada, 2019: 1031–1036. [24] PENG Zhinan, CHENG Hong, HUANG Rui, et al. Adaptive event-triggered motion tracking control strategy for a lower limb rehabilitation exoskeleton[C]. 2021 60th IEEE Conference on Decision and Control (CDC), Austin, USA, 2021: 1795–1801. [25] ZHANG Juanjuan, FIERS P, WITTE K A, et al. Human-in-the-loop optimization of exoskeleton assistance during walking[J]. Science, 2017, 356(6344): 1280–1284. doi: 10.1126/science.aal5054 [26] RAI A, ANTONOVA R, MEIER F, et al. Using simulation to improve sample-efficiency of Bayesian optimization for bipedal robots[J]. The Journal of Machine Learning Research, 2019, 20(1): 1844–1867. [27] LITTELL R and RAMON C. Multiple comparison procedures[J]. Technometrics, 1993, 31(2): 261–262. -

 下载:
下载:




图(6) / 表(3)
计量
- 文章访问数: 1338
- HTML全文浏览量: 954
- PDF下载量: 141
- 被引次数: 0
