

Countermeasures Against UAV Swarm Through Detection and Suppression of Fly Synchronization
-
摘要: 该文研究了无人机蜂群飞行同步的检测和干扰方案,把无人机蜂群飞行同步过程看作复杂系统的涌现效应,提出一种基于双阈值的涌现判定算法。通过同时监测目标系统飞行同步过程中的熵差和网络连通度,克服已有算法因忽略网络状态监控而误判的问题,准确及时地识别飞行同步的发生、达成和失败,为控制抑制时机提供坚实的前提基础。以平均功率为约束设计带内干扰行为,从使目标系统通信容量降低的角度建立干扰行为模型,并通过仿真分析其效能。研究发现,低强度持续干扰可有效迟滞目标系统同步过程、延长同步时间,且具有更好隐蔽性;中等强度持续干扰可快速终止飞行同步过程。基于以上分析,首次根据破坏和迟滞的不同作战意图设计了无人机蜂群飞行同步的反制方案。通过仿真验证了其有效性。Abstract: This paper studies the detection and suppression mechanisms of fly synchronization of Unmanned Aerial Vehicle (UAV) swarm. Fly synchronization process is viewed as emergence in the complex system. A detection algorithm is proposed based on emergence identification with double thresholds. By simultaneously monitoring the entropy difference of flight synchronization process and network connectivity of the target system, the misjudgment of existing algorithms caused by ignoring the network status is overcomed, and the occurrence, achievement, or failure of fly synchronization is accurately identified, which provides a solid prerequisite for the timing control of the suppression mechanism. In-band radio interference behavior is designed under the constraint of average power. The interference behavior modeled from the perspective of degrading the target system’s communication capacity and the effect is analyzed through simulations. It is found that low-intensity continuous interference can effectively delay the fly synchronization process and prolong the time of that. What’s more, it has better concealment. Medium-intensity continuous interference can rapidly stop that process. Based on the above perception, for the first time, countermeasures for the UAV swarm’s fly synchronization are designed according to different operational intentions of delay and disruption. Simulation results show the effectiveness of the countermeasures.
-
Key words:
- UAV swarm /
- Countermeasure /
- Fly synchronization /
- In-band interference /
- Emergence
-
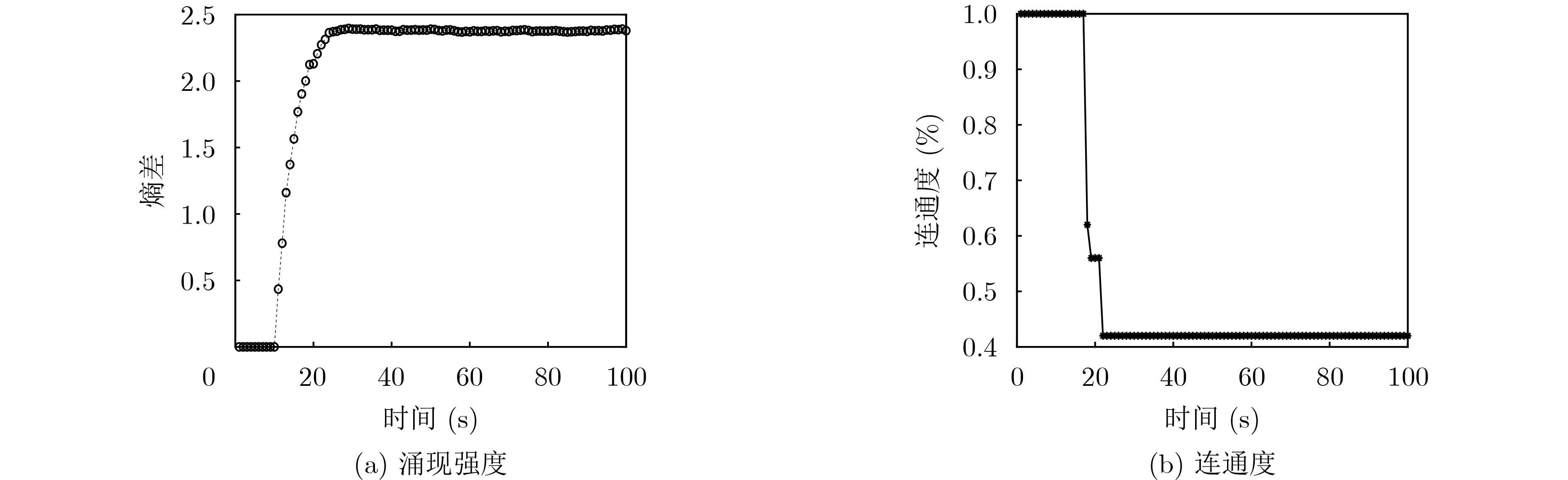
算法1 基于双阈值的涌现判定算法 步骤1:设定参数初始值,$\varPhi = \phi $, $L = \{ {l_0}\} $,连通度阈值${\delta _c} $。 步骤2:监视是否发现目标无人机集群。 若发现目标,测量个体速度角$\varPhi = \{ {\varphi_i},i = 1, 2,\cdots ,N\}$,记当前
时刻为$t = 0 $,根据式(7)估计$\varPhi$的概率分布,计算初始观察时
刻熵${H_0} $。步骤3:测量t时刻UAVs速度角$\varPhi = \{ {\varphi _i},i = 1, 2,\cdots ,N\}$,根据
式(7)估计其概率分布,计算角度熵${H_t} $,计算熵差
${E_t} = {H_0} - {H_t} $。若$E > 0 $,则记录涌现起始时刻${t_{{\rm{start}}} } = t$,记录${E_{ {t_{{\rm{start}}} } } }$,进入步
骤4;否则回到步骤3;步骤4:设定滑窗长度为2,在滑窗内连续观测目标系统,并记录
如下状态。for $t = {t_0}:{t_0} + k $: {4a.对时刻t,测量各节点的速度角${\varPhi }$,根据式(7)估计其概率分
布,并计算角度熵${H_t} $和熵差${E_t} $,测量位置$L = {l_i},i = 1, 2,\cdots ,N $,
根据式(10)计算$C(t) $,判定是否满足$C\left( t \right) > 1 - {\delta _c} $。若不满
足,则判定无法达到涌现,记录判定时间${t_{{\rm{end}}} }$,跳到步骤5;若
满足,跳到4b}4b.计算观察窗口内两个连续的熵差,若满足
$\Delta {E_1} = {E_{{t_0} + 1}} - {E_{{t_0}}} $, $ \Delta {E_2} = {E_{{t_0} + 2}} - {E_{{t_0} + 1}} > 0 $且
$ \Delta {E_1} > \Delta {E_2} $,则判定为涌现达成,记录判定结果记录flag为涌
现成功,记录${t_{{\rm{end}}} } = i$;}步骤5:记录判定结果,计算判定时间$t = {t_{{\rm{end}}} } - {t_{{\rm{start}}} }$。  下载: 导出CSV
下载: 导出CSV
算法2 无人机蜂群飞行同步反制方案 步骤1 初始化$ {\delta _c} $,启动无人机蜂群监测,若发现目标,转步
骤2,否则,转步骤1;步骤2 利用算法1判定是否启动飞行同步,若是,则转步骤3,
否则,转步骤2;步骤3 测量到目标无人机蜂群的距离,利用式(15)计算路径损耗[26]。 ${\rm{Loss}}[{\rm{dB}}] = 32.44 + 20\lg d\left( {{\rm{km}}} \right) + 20\lg f\left( {{\rm{MHz}}} \right) - 20 \lg A$ (15) 其中,d是到蜂群的距离,以km计;f是工作频点,以MHz计;
A是路径损耗因子,通常取2到4。将路径损耗转换为比值形式,
即${l_{{\rm{path}}} } = 1{0^{{\rm{Loss}}/10} }$;步骤4 根据反制意图和${l_{{\rm{path}}} }$,按如下方式生成干扰图案
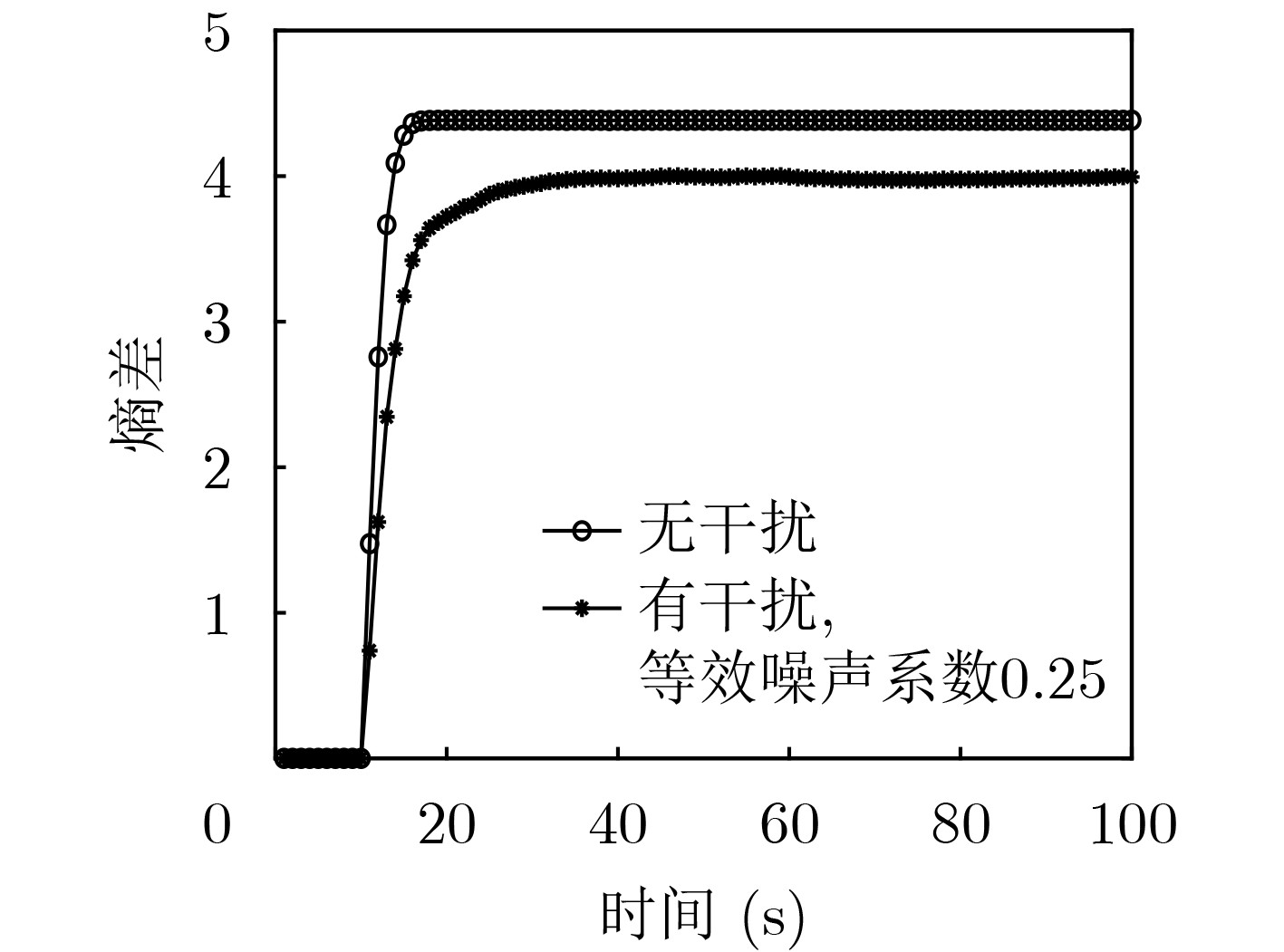
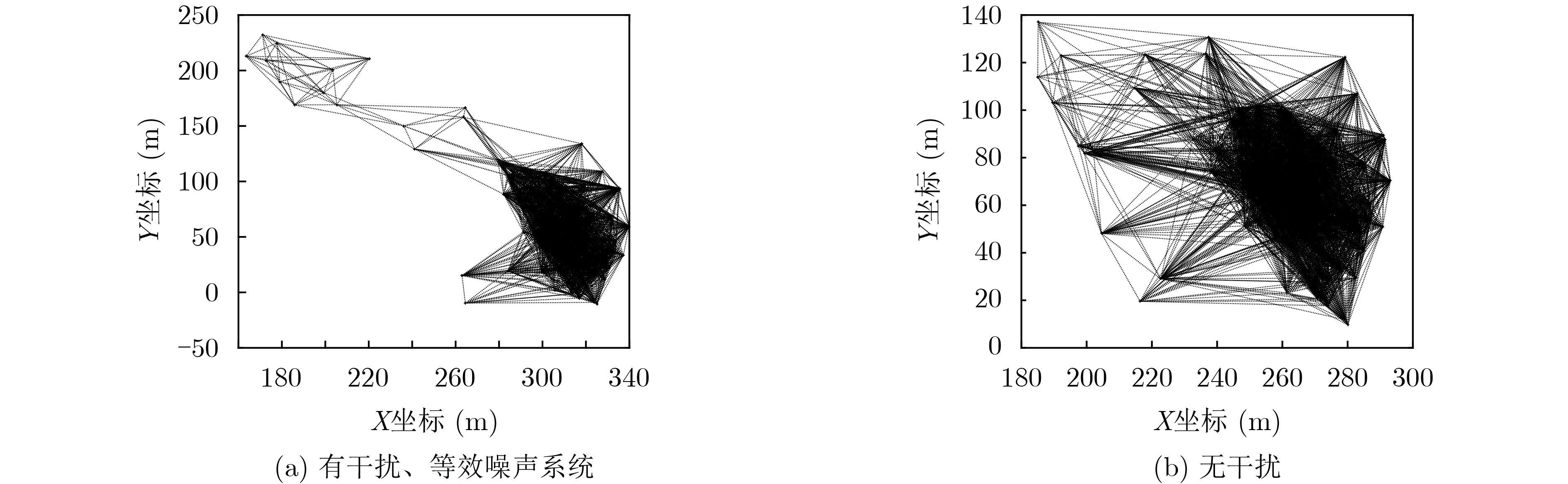
${\boldsymbol{I}} = [{I_m},m = 1,2,\cdots,M]$,发送干扰信号。4a 若为了迟滞飞行同步,则发送低强度持续干扰信号(即占空
比100%),等效噪声系数设为$\beta = 0.25 $,即${I_m} = \beta {n_0}B{l_{{\rm{path}}} }$;4b 若为了破坏飞行同步,则发送中等强度持续干扰信号(即,占
空比100%)等效噪声系数$ \beta = 1 $, ${I_m} = \beta {n_0}B{l_{{\rm{path}}} }$;步骤5 测量目标系统连通度$C(t) $,若$ C\left( t \right) < 1 - {\delta _c} $,或
$ C\left( t \right) > 1 - {\delta _c} $且目标达成同步,则终止干扰。
下载: 导出CSV
-
[1] 吴涛, 冯伟强, 张昊. 无人机蜂群对海作战概念模型研究[J]. 指挥控制与仿真, 2022, 44(2): 7–11. doi: 10.3969/j.issn.1673-3819.2022.02.002WU Tao, FENG Weiqiang, and ZHANG Hao. Research on concept model of UAV swarm naval attack operation[J]. Command Control &Simulation, 2022, 44(2): 7–11. doi: 10.3969/j.issn.1673-3819.2022.02.002 [2] 钮伟, 黄佳沁, 缪礼锋. 无人机蜂群对海作战概念与关键技术研究[J]. 指挥控制与仿真, 2018, 40(1): 20–27. doi: 10.3969/j.issn.1673-3819.2018.01.004NIU Wei, HUANG Jiaqin, and MIAO Lifeng. Research on the concept and key technologies of unmanned aerial vehicle swarm concerning naval attack[J]. Command Control &Simulation, 2018, 40(1): 20–27. doi: 10.3969/j.issn.1673-3819.2018.01.004 [3] WALTER B, SANNIER A, REINERS D, et al. UAV swarm control: Calculating digital pheromone fields with the GPU[J]. The Journal of Defense Modeling and Simulation:Applications, Methodology, Technology, 2006, 3(3): 167–176. doi: 10.1177/154851290600300304 [4] COXWORTH B. Gremlin drone recovered in mid-air for the first time[EB/OL]. https://newatlas.com/drones/gremlin-drone-recovery-mid-air/, 2021. [5] REILLY B. Gremlins program successfully retrieves drone in mid-flight[J]. Inside the Air Force, 2021, 32(45): 1–32. [6] 张江南, 何勇, 潘绪超, 等. 无人机宽带高功率电磁脉冲易损性分析[J]. 弹箭与制导学报, 2020, 40(1): 110–115,120. doi: 10.15892/j.cnki.djzdxb.2020.01.022ZHANG Jiangnan, HE Yong, PAN Xuchao, et al. Vulnerability analysis of UAV against mesoband electromagnetic pulse[J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2020, 40(1): 110–115,120. doi: 10.15892/j.cnki.djzdxb.2020.01.022 [7] 赵铜城, 余道杰, 周东方, 等. 无人机GPS接收机超宽谱电磁脉冲效应与试验分析[J]. 强激光与粒子束, 2019, 31(2): 023001. doi: 10.11884/HPLPB201931.180365ZHAO Tongcheng, YU Daojie, ZHOU Dongfang, et al. Ultra-wide spectrum electromagnetic pulse effect and experimental analysis of UAV GPS receiver[J]. High Power Laser and Particle Beams, 2019, 31(2): 023001. doi: 10.11884/HPLPB201931.180365 [8] 王统刚, 彭世蕤, 王广学. 高重频脉冲干扰对GPS接收机前端的干扰机理分析[J]. 空军预警学院学报, 2021, 35(4): 248–253. doi: 10.3969/j.issn.2095-5839.2021.04.004WANG Tonggang, PENG Shiwei, and WANG Guangxue. Analysis on the interference mechanism of high repetition frequency pulse jamming GPS receiver front-end[J]. Journal of Air Force Early Warning Academy, 2021, 35(4): 248–253. doi: 10.3969/j.issn.2095-5839.2021.04.004 [9] 杨王诗剑. 引领海战革命——浅析无人机"蜂群战术"[J]. 兵器知识, 2016(3): 1–4. doi: 10.19437/j.cnki.11-1470/tj.2016.03.016YANG Wangshijian. Leading the naval war revolution - Analysis of UAV swarm tactics[J]. Ordnance Knowledge, 2016(3): 1–4. doi: 10.19437/j.cnki.11-1470/tj.2016.03.016 [10] 付鑫, 赵然, 梁延峰, 等. 反无人机蜂群技术发展综述[J]. 中国电子科学研究院学报, 2022, 17(5): 421–428. doi: 10.3969/j.issn.1673-5692.2022.05.003FU Xin, ZHAO Ran, LIANG Yanfeng, et al. Review on the development of anti UAV bee colony technology[J]. Journal of CAEIT, 2022, 17(5): 421–428. doi: 10.3969/j.issn.1673-5692.2022.05.003 [11] HWANG S P and KIM D H. A study on the establishment of anti-drone system for the protection of national important facilities[J]. The Society of Digital Policy and Management, 2020, 18(11): 247–257. doi: 10.14400/JDC.2020.18.11.247 [12] 介冲, 苗壮, 叶婷婷. 美军现役反无人机系统发展研究[J]. 飞航导弹, 2020(12): 36–42. doi: 10.16338/j.issn.1009-1319.20200235JIE Chong, MIAO Zhuang, and YE Tingting. Research on the development of active anti UAV system of US army[J]. Aerospace Technology, 2020(12): 36–42. doi: 10.16338/j.issn.1009-1319.20200235 [13] 邱华鑫, 段海滨. 从鸟群群集飞行到无人机自主集群编队[J]. 工程科学学报, 2017, 39(3): 317–322. doi: 10.13374/j.issn2095-9389.2017.03.001QIU Huaxin and DUAN Haibin. From collective flight in bird flocks to unmanned aerial vehicle autonomous swarm formation[J]. Chinese Journal of Engineering, 2017, 39(3): 317–322. doi: 10.13374/j.issn2095-9389.2017.03.001 [14] 赵海涛, 高士顺, 王海军, 等. 无人机自主通信和组网能力评估方法[J]. 通信学报, 2020, 41(8): 87–98. doi: 10.11959/j.issn.1000-436x.2020143ZHAO Haitao, GAO Shishun, WANG Haijun, et al. Evaluation method for autonomous communication and networking capability of UAV[J]. Journal on Communications, 2020, 41(8): 87–98. doi: 10.11959/j.issn.1000-436x.2020143 [15] 段海滨, 邱华鑫, 范彦铭. 基于捕食逃逸鸽群优化的无人机紧密编队协同控制[J]. 中国科学:技术科学, 2015, 45(6): 559–572. doi: 10.1360/N092015-00125DUAN Haibin, QIU Huaxin, and FAN Yanming. Unmanned aerial vehicle close formation cooperative control based on predatory escaping pigeon-inspired optimization[J]. Scientia Sinica Technologica, 2015, 45(6): 559–572. doi: 10.1360/N092015-00125 [16] 柳强, 何明, 刘锦涛, 等. 无人机"蜂群"的蜂拥涌现行为识别与抑制机理[J]. 电子学报, 2019, 47(2): 374–381. doi: 10.3969/j.issn.0372-2112.2019.02.017LIU Qiang, HE Ming, LIU Jintao, et al. A mechanism for identifying and suppressing the emergent flocking behaviors of UAV swarms[J]. Acta Electronica Sinica, 2019, 47(2): 374–381. doi: 10.3969/j.issn.0372-2112.2019.02.017 [17] LIU Qiang, HE Ming, XU Daqin, et al. A mechanism for recognizing and suppressing the emergent behavior of UAV swarm[J]. Mathematical Problems in Engineering, 2018, 2018: 6734923. doi: 10.1155/2018/6734923 [18] 屈强, 何新华, 刘中晅. 系统涌现的要素和动力学机制[J]. 系统科学学报, 2017, 25(3): 25–29.QU Qiang, HE Xinhua, and LIU Zhongxuan. Essential factors and dynamic mechanism of the system emergence[J]. Chinese Journal of Systems Science, 2017, 25(3): 25–29. [19] 詹姆斯·P. G. 斯特本兹, 卡米什·纳莫杜里, 塞尔日·肖梅特, 等, 刘亚威, 闫娟, 译. 无人机网络与通信[M]. 北京: 机械工业出版社, 2019.STERBENZ J P G, NAMUDURI K, CHAUMETTE S, et al, LIU Yawei, YAN Juan, translation. UAV Networks and Communications[M]. Beijing: China Machine Press, 2019. [20] VICSEK T, CZIRÓK A, BEN-JACOB E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226–1229. doi: 10.1103/PhysRevLett.75.1226 [21] 程建, 张明清, 唐俊, 等. 基于信息熵的复杂系统涌现量化方法研究[J]. 信息工程大学学报, 2014, 15(3): 270–274. doi: 10.3969/j.issn.1671-0673.2014.03.003CHENG Jian, ZHANG Mingqing, TANG Jun, et al. Emergence quantitative analysis of complex adaptive systems based on Shannon's information entropy[J]. Journal of Information Engineering University, 2014, 15(3): 270–274. doi: 10.3969/j.issn.1671-0673.2014.03.003 [22] 屈强, 何新华, 陆皖麟. 基于f-散度的复杂系统涌现度量方法[J]. 装甲兵工程学院学报, 2017, 31(3): 106–110. doi: 10.3969/j.issn.1672-1497.2017.03.020QU Qiang, HE Xinhua, and LU Wanlin. A new approach to measure the emergence of complex system based on f-divergence[J]. Journal of Academy of Armored Force Engineering, 2017, 31(3): 106–110. doi: 10.3969/j.issn.1672-1497.2017.03.020 [23] HOPCROFT J E and TARJAN R E. Dividing a graph into triconnected components[J]. SIAM Journal on Computing, 1973, 2(3): 135–158. doi: 10.1137/0202012 [24] 朱艮春, 魏光辉, 潘晓东, 等. 典型通信电台带内干扰辐射效应研究[J]. 微波学报, 2011, 27(6): 93–96. doi: 10.14183/j.cnki.1005-6122.2011.06.005ZHU Genchun, WEI Guanghui, PAN Xiaodong, et al. Effects research of typical communication radio radiated by intraband interference[J]. Journal of Microwaves, 2011, 27(6): 93–96. doi: 10.14183/j.cnki.1005-6122.2011.06.005 [25] 李新峰, 郝晓军, 韩慧, 等. 基于误码率的通信系统电磁干扰效应研究[J]. 微波学报, 2017, 33(1): 71–76. doi: 10.14183/j.cnki.1005-6122.201701016LI Xinfeng, HAO Xiaojun, HAN Hui, et al. Electromagnetic interference effect research of communication system based on SER[J]. Journal of Microwaves, 2017, 33(1): 71–76. doi: 10.14183/j.cnki.1005-6122.201701016 [26] GOLDSMITH A, 杨鸿文, 李卫东, 郭文彬, 等译. 无线通信[M]. 北京: 人民邮电出版社, 2007.GOLDSMITH A, YANG Hongwen, LI Weidong, GUO Wenbin, et al. translation. Wireless Communications[M]. Beijing: Posts & Telecom Press, 2007. -

 下载:
下载:






图(11) / 表(2)
计量
- 文章访问数: 1307
- HTML全文浏览量: 1053
- PDF下载量: 167
- 被引次数: 0
