

DR-GAN: An Unsupervised Learning Approach to Clutter Suppression for Ground Penetrating Radar
-
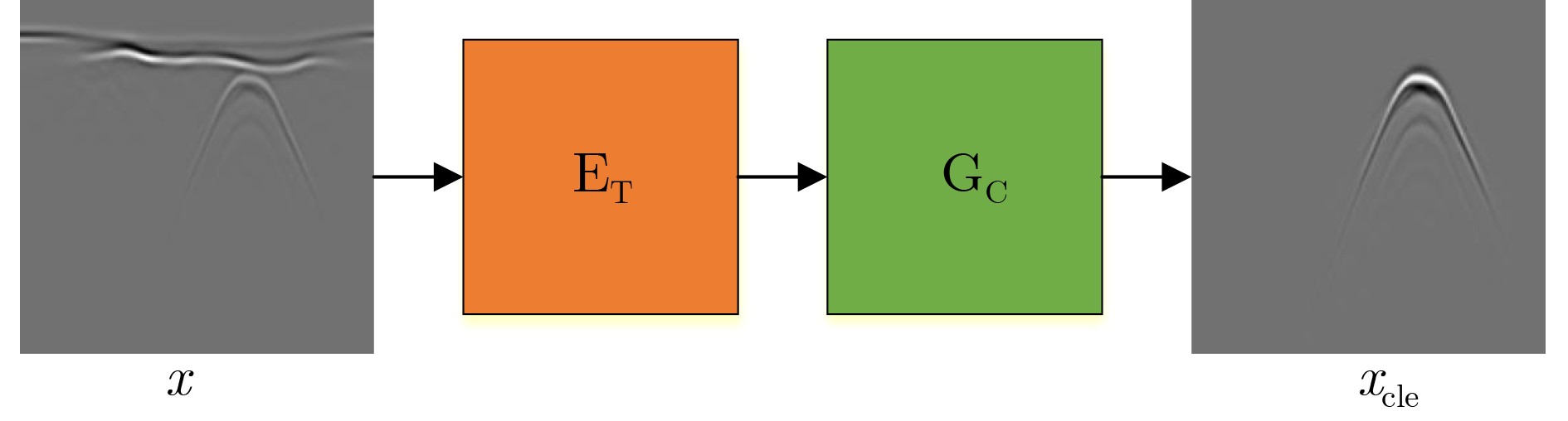
摘要: 探地雷达(GPR)是一种基于电磁波的地下无损探测技术,广泛应用于市政工程、交通、军事等领域。在数据采集过程中,由于发射天线和接收天线之间的耦合、起伏地面的散射以及地下随机媒质的复杂性等原因,采集得到的GPR B-scan回波中通常存在杂波,杂波严重影响了地下目标的检测和特征提取。该文提出一种用于GPR B-scan图像杂波抑制的解纠缠表示生成对抗网络(DR-GAN),设计了目标特征编码器和杂波特征编码器用来提取GPR B-scan图像中的目标特征和杂波特征,设计了杂波抑制生成器用来获取杂波抑制后的GPR B-scan图像。与现有的基于监督学习的GPR杂波抑制方法相比,该方法在网络训练时不需要成对的匹配数据,可以更好地应用于实测GPR图像的杂波抑制。在仿真和实测GPR数据上的实验结果表明,DR-GAN这一无监督学习网络具有更好的杂波抑制性能。对石英砂中埋设的钢筋进行数据采集,运用DR-GAN对含杂波的实测数据进行处理,处理结果的改善系数(IF)指标较现有的鲁棒非负矩阵分解(RNMF)方法提高了17.85 dB。Abstract: Ground Penetrating Radar (GPR) is an underground nondestructive detection technology based on electromagnetic wave, which is widely used in municipal engineering, transportation, military and other fields. In the process of data acquisition, due to the coupling between transmitting antenna and receiving antenna, scattering from undulating ground and the complexity of underground random media, there is usually clutter in the GPR B-scan, which affects seriously the detection and feature extraction of underground targets. A Disentanglement Representation Generative Adversarial network (DR-GAN) for clutter suppression in GPR B-scan images is proposed. A target feature encoder and a clutter feature encoder are designed to extract target features and clutter features in GPR B-scan images. A clutter suppression generator is designed to obtain the GPR B-scan image after clutter suppression. Compared with the existing GPR clutter suppression methods based on supervised learning, the proposed method does not need pairwise matching data during network training, and can be better applied to the clutter suppression of measured GPR images. Experimental results on simulated and measured GPR data show that DR-GAN is an unsupervised learning network with better clutter suppression performance. The data of reinforcement embedded in quartz sand are collected, and the measured data containing clutter are processed by DR-GAN. The Improvement Factor (IF) index of the processing results is 17.85 dB higher than that of the existing Robust Nonnegative Matrix Factorization (RNMF) method.
-
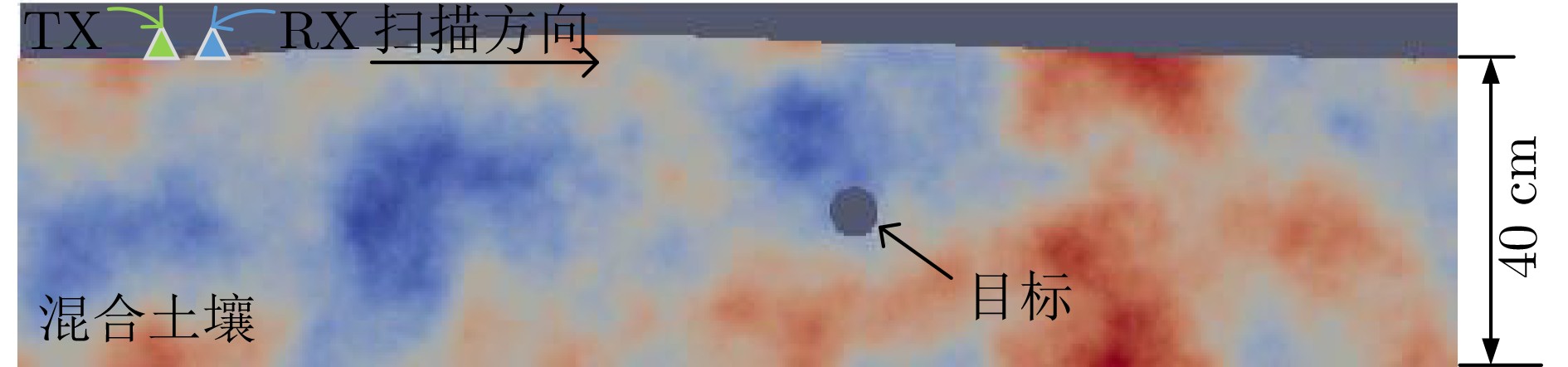
表 1 仿真场景参数
模型参数 扫描场景参数 模型尺寸 1.8 m×0.002 m×0.45 m 发射源波形 瑞克子波 单元格大小 0.002 m×0.002 m×0.002 m 发射中心频率 2 GHz 土壤沙子重量百分比 50% 仿真时窗 10 ns 土壤粘土重量百分比 50% 发射天线起点 (0.1 m,0.002 m,0.4 m) 土壤的容重 2.0 g/cm3 接收天线起点 (0.2 m,0.002 m,0.4 m) 土壤的沙粒密度 2.66 g/cm3 每次扫描天线移动距离 0.01 m 土壤体积含水率范围 0.001~0.150 目标形状 圆柱、方柱 土壤材料种类 50种 圆柱半径 0.03~0.05 m 土壤厚度 0.4 m 方柱边长 0.04~0.06 m 土壤表面高度起伏范围 0.38~0.41 m 目标高度 0.2~0.3 m 目标水平位置 0.35~1.45 m  下载: 导出CSV
下载: 导出CSV
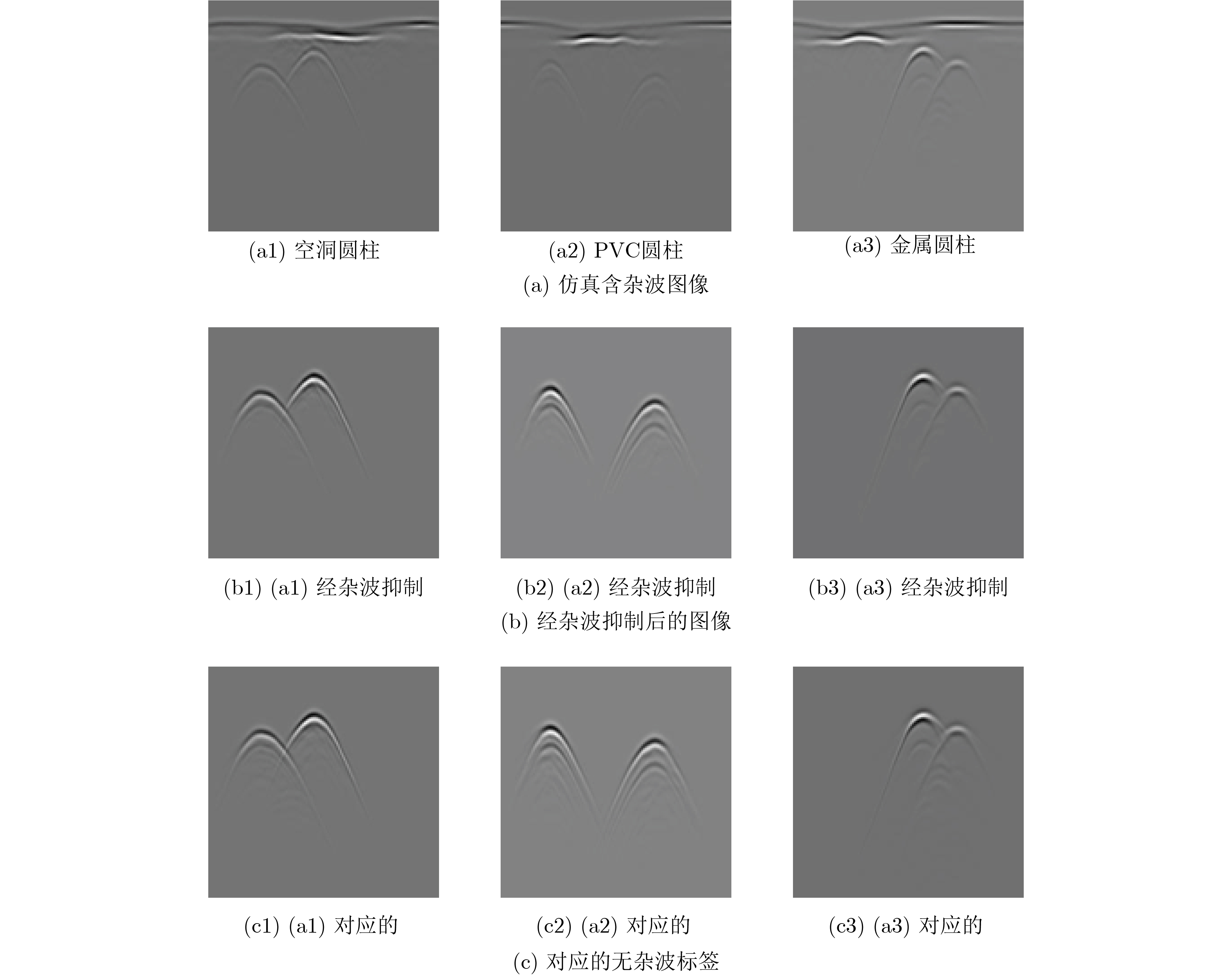
表 2 各种杂波抑制算法的平均PSNR(dB)/平均SSIM
目标类型 MS SVD NMF RPCA RNMF RAE 本文DR-GAN PVC圆柱体 0.85/0.014 22.38/0.365 22.23/0.305 23.54/0.259 22.72/0.205 22.56/0.154 36.66/0.965 空洞圆柱体 6.62/0.060 22.96/0.420 22.96/0.398 25.94/0.470 24.35/0.338 22.99/0.363 42.73/0.989 金属圆柱体 12.58/0.126 25.26/0.588 25.18/0.562 27.59/0.612 25.86/0.471 25.92/0.432 44.70/0.992 PVC方柱体 6.41/0.021 23.09/0.357 24.06/0.365 27.11/0.437 25.84/0.351 25.22/0.287 43.65/0.980 空洞方柱体 12.45/0.072 25.79/0.535 25.38/0.494 28.78/0.597 26.43/0.444 25.80/0.369 47.92/0.993 金属方柱体 16.97/0.181 25.97/0.538 25.39/0.504 29.15/0.652 27.45/0.538 26.72/0.458 48.00/0.993
下载: 导出CSV
表 3 各种杂波抑制方法的平均用时(s)
MS SVD NMF RPCA RNMF RAE DR-GAN(GPU) 时间 0.002 9 0.010 2 0.013 6 2.083 9 6.063 6 3.872 6 0.103 0
下载: 导出CSV
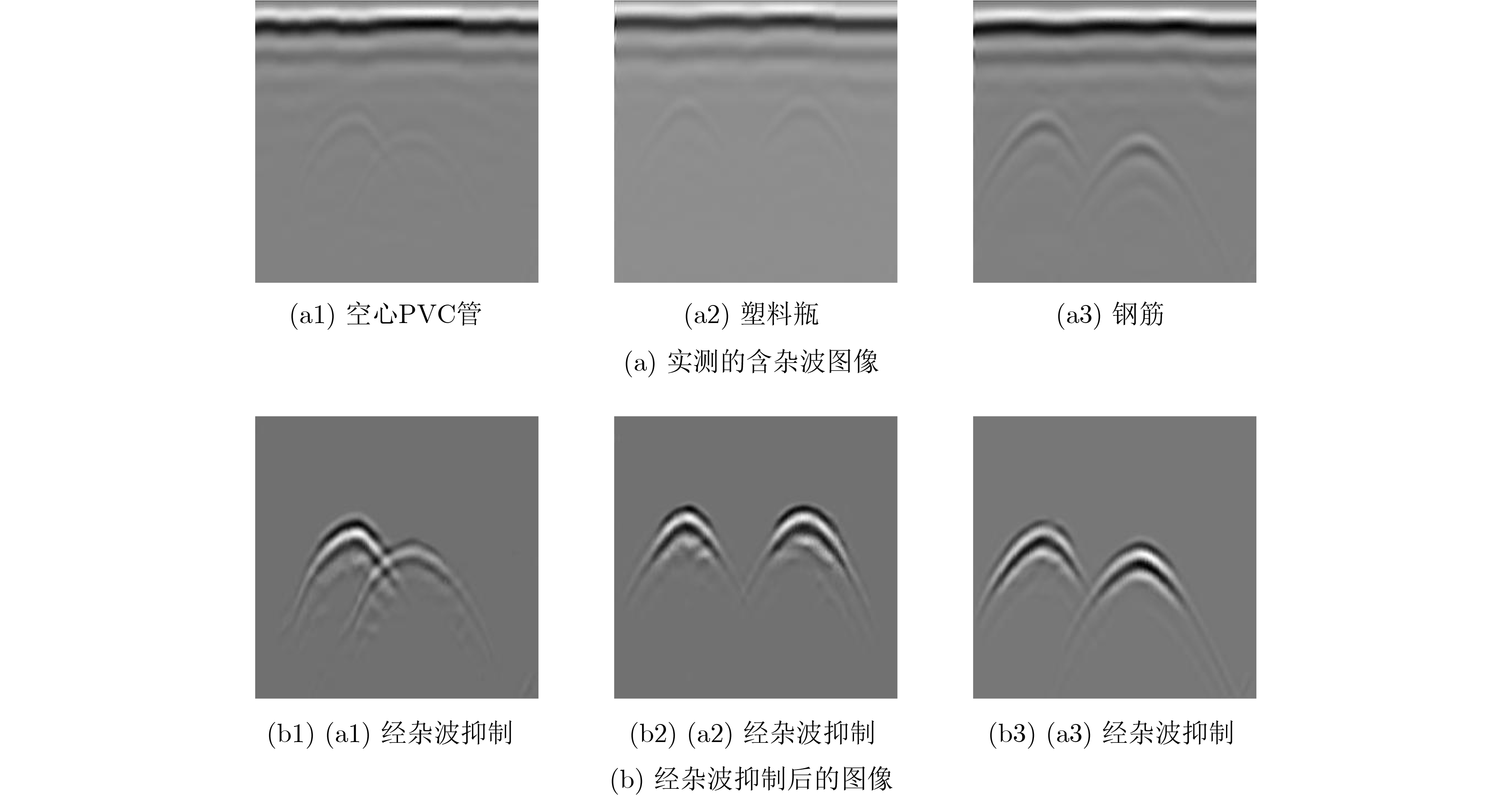
表 4 实测数据杂波抑制的平均IF(dB)
目标类型 MS SVD NMF RPCA RNMF RAE 本文DR-GAN 空心PVC管 10.49 24.19 24.59 20.68 24.74 12.01 41.34 空心塑料瓶 13.26 24.50 23.82 23.18 24.67 18.40 45.79 钢筋 13.19 26.07 25.96 26.28 28.16 26.65 46.01
下载: 导出CSV
-
[1] 乔尔, 雷文太, 童孝忠, 周肠, 等译. 探地雷达理论与应用[M]. 北京: 电子工业出版社, 2011.JOL H M, LEI Wentai, TONG Xiaozhong, ZHOU Yang, et al. translation. Ground Penetrating Radar: Theory and Applications[M]. Beijing: Publishing House of Electronics Industry, 2011. [2] 刘澜波, 钱荣毅. 探地雷达: 浅表地球物理科学技术中的重要工具[J]. 地球物理学报, 2015, 58(8): 2606–2617. doi: 10.6038/cjg20150802LIU Lanbo and QIAN Rongyi. Ground penetrating radar: A critical tool in near-surface geophysics[J]. Chinese Journal of Geophysics, 2015, 58(8): 2606–2617. doi: 10.6038/cjg20150802 [3] TONG Zheng, YUAN Dongdong, GAO Jie, et al. Pavement-distress detection using ground-penetrating radar and network in networks[J]. Construction and Building Materials, 2020, 233: 117352. doi: 10.1016/j.conbuildmat.2019.117352 [4] 刘海, 黄肇刚, 岳云鹏, 等. 地下管线渗漏环境下探地雷达信号特征分析[J]. 电子与信息学报, 2022, 44(4): 1257–1264. doi: 10.11999/JEIT211213LIU Hai, HUANG Zhaogang, YUE Yunpeng, et al. Characteristics analysis of ground penetrating radar signals for groundwater pipe leakage environment[J]. Journal of Electronics &Information Technology, 2022, 44(4): 1257–1264. doi: 10.11999/JEIT211213 [5] SOLIMENE R, CUCCARO A, DELL' AVERSANO A, et al. Ground clutter removal in GPR surveys[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(3): 792–798. doi: 10.1109/JSTARS.2013.2287016 [6] ABUJARAD F, NADIM G, and OMAR A. Clutter reduction and detection of landmine objects in ground penetrating radar data using Singular Value Decomposition (SVD)[C]. The 3rd International Workshop on Advanced Ground Penetrating Radar, Delft, Netherlands, 2005: 37–41. [7] CHEN Gaoxiang, FU Liyun, CHEN Kanfu, et al. Adaptive ground clutter reduction in ground-penetrating radar data based on principal component analysis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(6): 3271–3282. doi: 10.1109/TGRS.2018.2882912 [8] ABUJARAD F and OMAR A. Comparison of independent component analysis (ICA) algorithms for GPR detection of non-metallic land mines[J]. SPIE, 2006, 6365: 636516. [9] KUMLU D and ERER I. Performance evaluation of NMF methods with different divergence metrics for landmine detection in GPR[J]. SPIE, 2018, 10794: 107940I. [10] TEMLIOGLU E and ERER I. Clutter removal in ground-penetrating radar images using morphological component analysis[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1802–1806. doi: 10.1109/LGRS.2016.2612582 [11] KUMLU D and ERER I. Improved clutter removal in GPR by robust nonnegative matrix factorization[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(6): 958–962. doi: 10.1109/LGRS.2019.2937749 [12] SONG Xiaosong, XIANG Deliang, ZHOU Kai, et al. Improving RPCA-based clutter suppression in GPR detection of antipersonnel mines[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(8): 1338–1342. doi: 10.1109/LGRS.2017.2711251 [13] NI Zhikang, YE Shengbo, SHI Cheng, et al. Clutter suppression in GPR B-scan images using robust autoencoder[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 3500705. doi: 10.1109/LGRS.2020.3026007 [14] ZHOU Huilin, WANG Yi, LIU Qiegen, et al. RNMF-guided deep network for signal separation of GPR without labeled data[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 3507705. doi: 10.1109/LGRS.2021.3099161 [15] GENG Jianrong, HE Juan, YE Hongxia, et al. A clutter suppression method based on LSTM network for ground penetrating radar[J]. Applied Sciences, 2022, 12(13): 6457. doi: 10.3390/app12136457 [16] TEMLIOGLU E and ERER I. A novel convolutional autoencoder-based clutter removal method for buried threat detection in ground-penetrating radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5103313. doi: 10.1109/TGRS.2021.3098122 [17] NI Zhikang, SHI Cheng, PAN Jun, et al. Declutter-GAN: GPR B-scan data clutter removal using conditional generative adversarial nets[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4023105. doi: 10.1109/LGRS.2022.3159788 [18] HUANG Yongqiang, XIA Wenjun, LU Zexin, et al. Noise-powered disentangled representation for unsupervised speckle reduction of optical coherence tomography images[J]. IEEE Transactions on Medical Imaging, 2021, 40(10): 2600–2614. doi: 10.1109/TMI.2020.3045207 [19] LEE H Y, TSENG H Y, HUANG Jiabin, et al. Diverse image-to-image translation via disentangled representations[C]. The 15th European Conference on Computer Vision, Munich, Germany, 2018: 36–52. [20] ABROL V, SHARMA P, and PATRA A. Improving generative modelling in VAEs using multimodal prior[J]. IEEE Transactions on Multimedia, 2021, 23: 2153–2161. doi: 10.1109/TMM.2020.3008053 [21] ISOLA P, ZHU Junyan, ZHOU Tinghui, et al. Image-to-image translation with conditional adversarial networks[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, USA, 2017: 5967–5976. [22] WARREN C, GIANNOPOULOS A, and GIANNAKIS I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar[J]. Computer Physics Communications, 2016, 209: 163–170. doi: 10.1016/j.cpc.2016.08.020 -


 下载:
下载:








图(11) / 表(4)
计量
- 文章访问数: 2149
- HTML全文浏览量: 1156
- PDF下载量: 289
- 被引次数: 0
