

Non-Star-Convex Extended Target Tracking Algorithm for Level-Set Gaussian Process
-
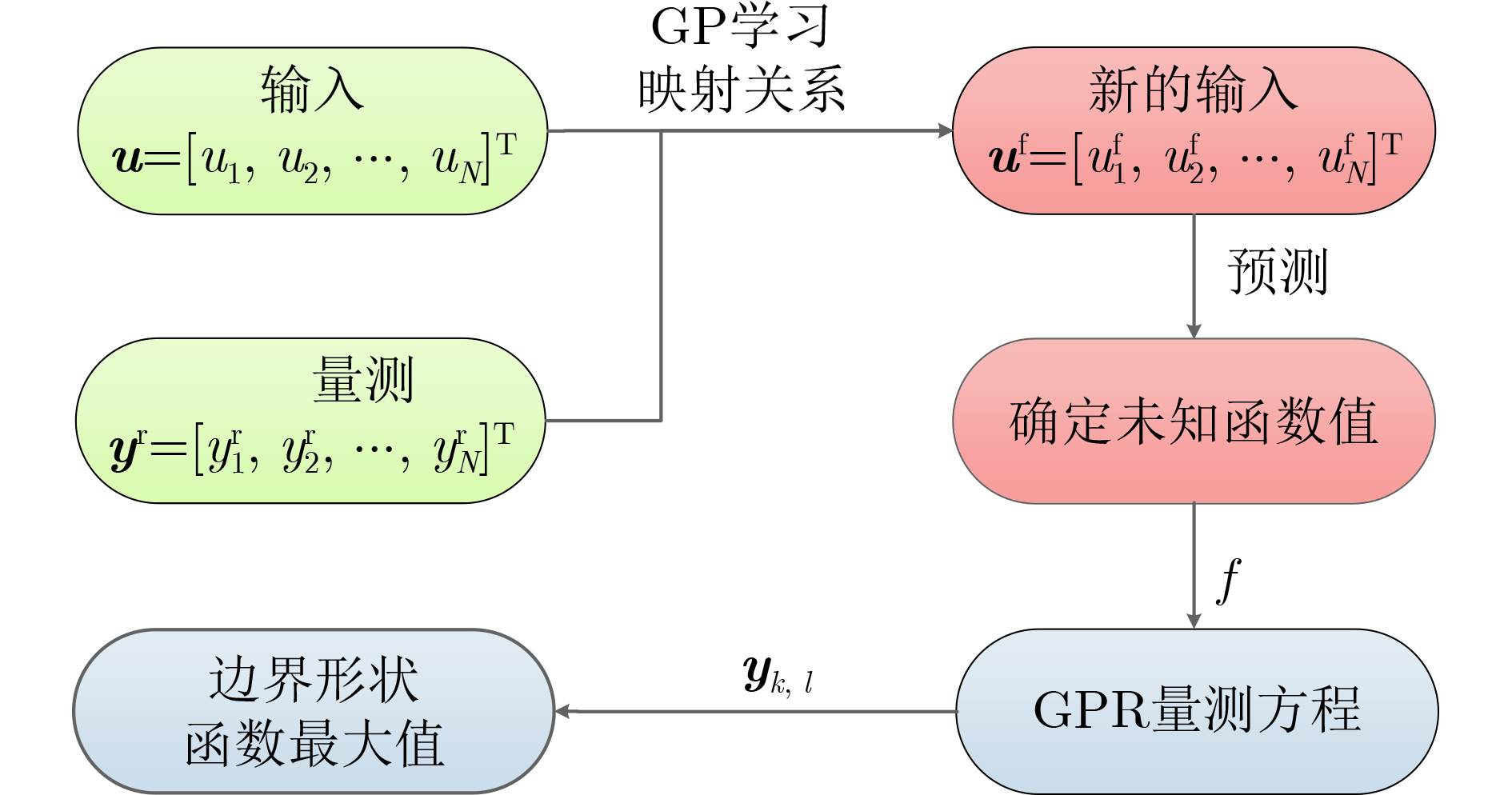
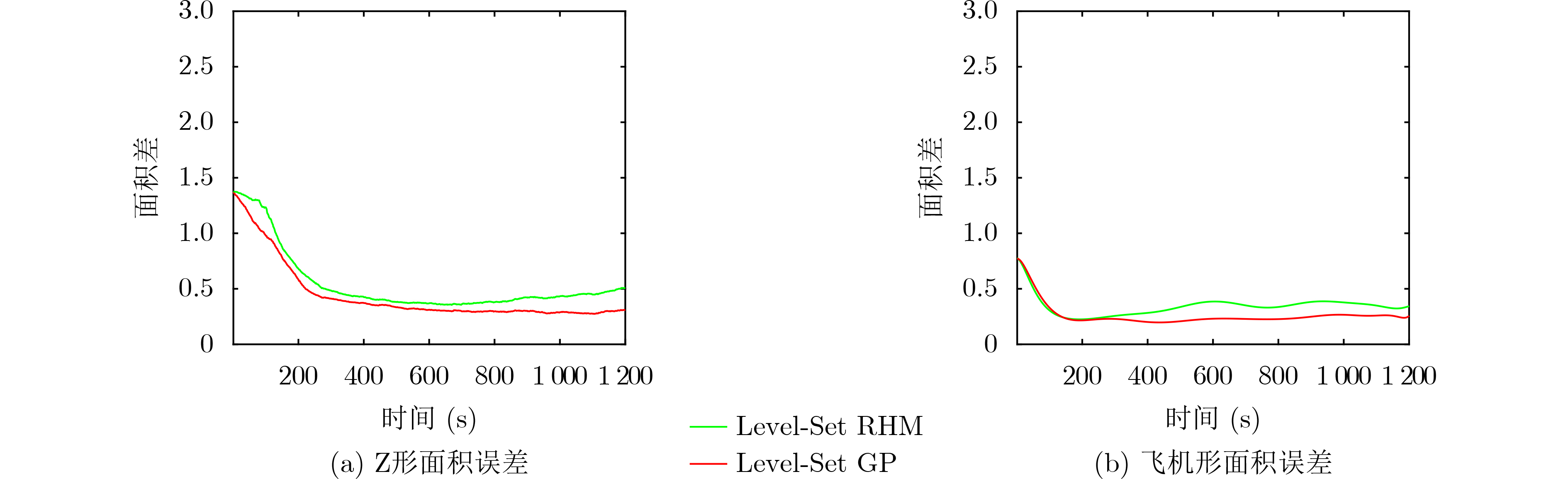
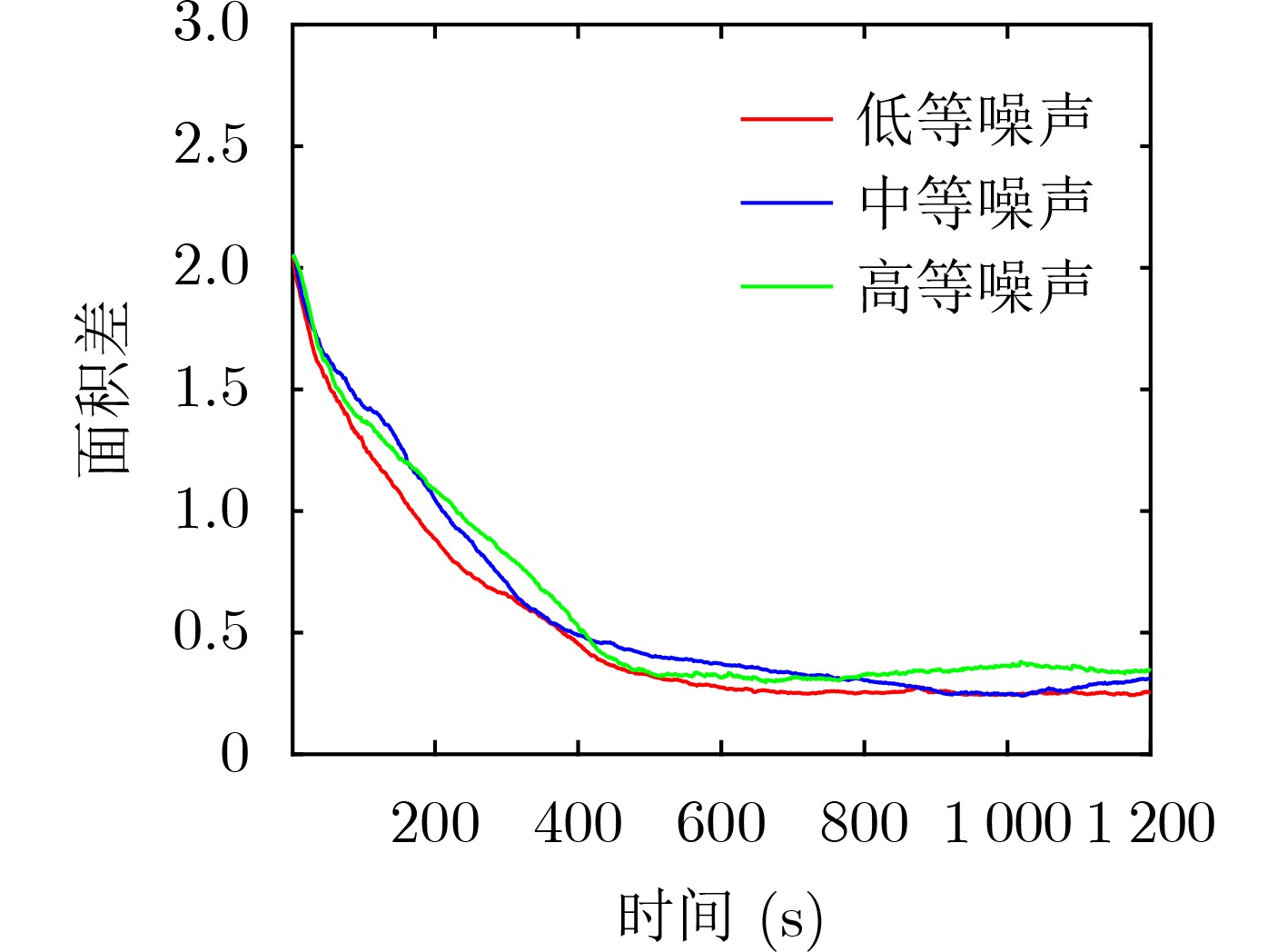
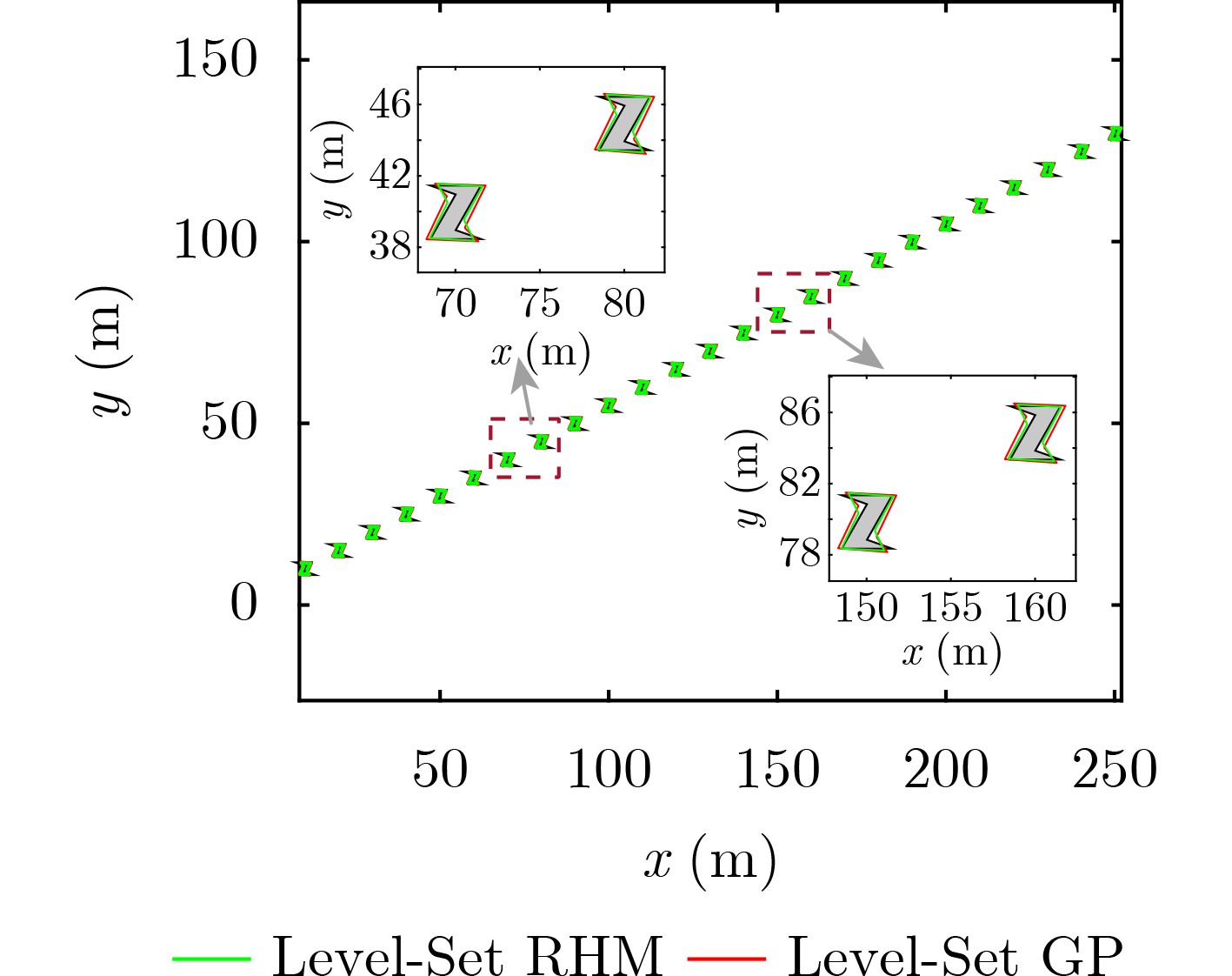
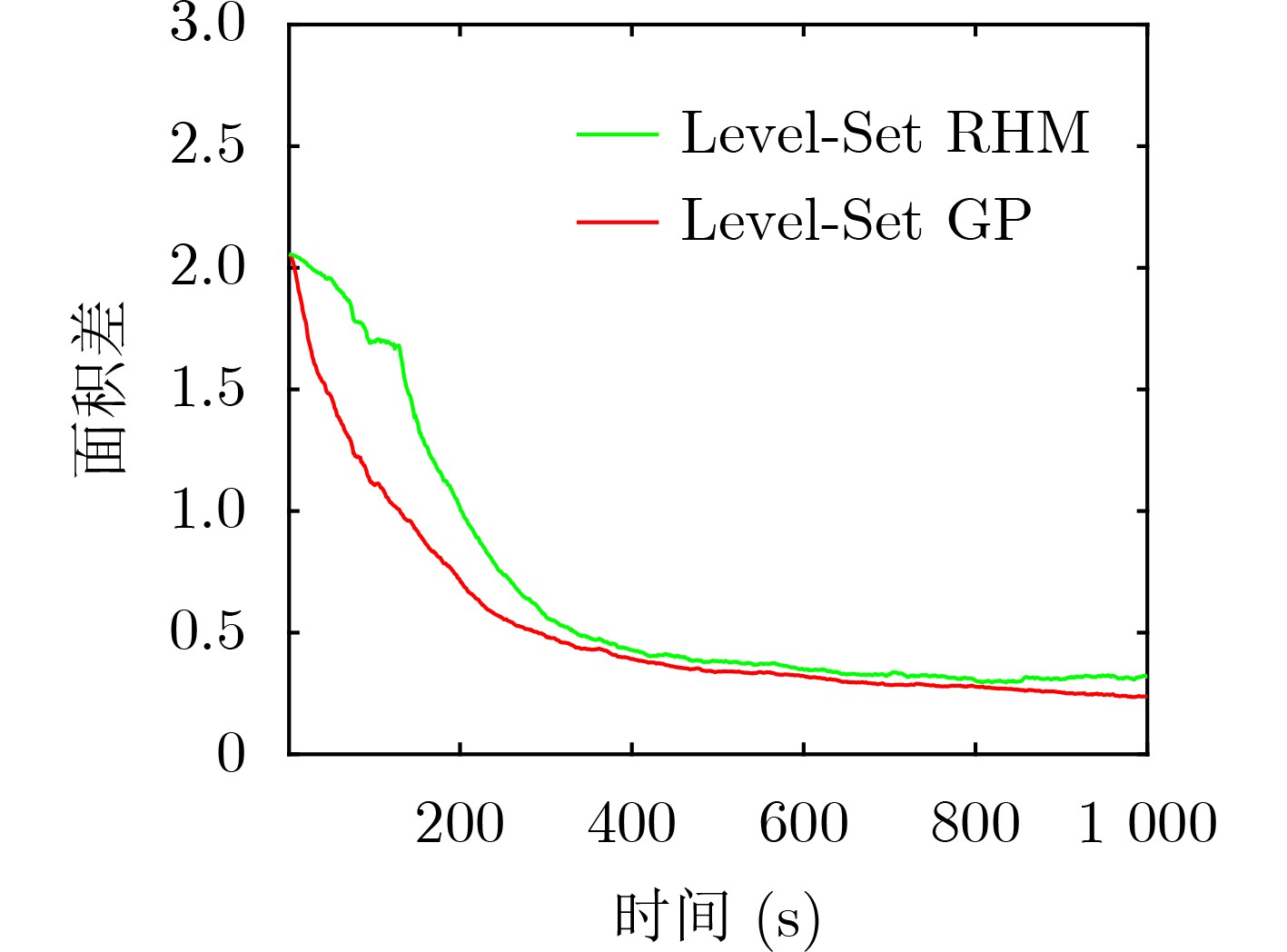
摘要: 针对复杂环境下的非星凸形不规则形状扩展目标跟踪问题,该文提出基于能量泛函的水平集高斯过程扩展目标跟踪算法。首先,利用水平集随机超曲面模型(Level-Set RHM)通过多边形方法对形状内部进行建模。然后,用高斯过程(GP)学习Level-Set建模输入与输出的非线性映射关系,以求得边界函数最大值,并进一步推导Level-Set与GP相融合的非线性量测方程。在最优非线性滤波的框架下,最终推导得到水平集高斯过程(Level-Set GP)算法,并利用面积差作为不规则形状扩展目标形状估计的评价指标。仿真实验表明了所提算法对非星凸形不规则形状扩展目标形状估计的有效性。
-
关键词:
- 扩展目标跟踪 /
- 非星凸形 /
- 水平集随机超曲面模型 /
- 高斯过程 /
- 非线性滤波
Abstract: To solve the problem of extended target tracking with non-star-convex irregular shape in complex environments, a level-set gaussian process extended target tracking algorithm based on energy functional is proposed. First, the interior of the shape is modeled by the polygonal method using the Level-Set Random Hypersurface Model (Level-Set RHM). Then, the nonlinear mapping relationship between the input and output of the Level-Set modeling is learned by using Gaussian Process (GP) to obtain the maximum value of the boundary function, and the nonlinear measurement equation based on the fusion of Level-Set and GP is further derived. Under the framework of optimal nonlinear filtering, Level-Set Gaussian Process (Level-Set GP) non-star convex extended target tracking algorithm is finally derived. And the area error is used as an evaluation index for the shape estimation of irregularly shaped extended targets. The simulation experiments show that the proposed algorithm is effective for the non-star convex irregular shape extended target shape estimation. -
算法1 Level-Set GP模型算法部分伪码 输入:${\boldsymbol{x} }_{ { {k} } - 1|{ {k} } - 1}^{ {\rm{f} } } , { {\boldsymbol{F} }^{\rm{f} } }, {{\boldsymbol{Q}}_{ {k} } }, {\boldsymbol{x}}_0^{{\rm{p}}} , {{\boldsymbol{P}}_{ { {k} } - 1|{ {k} } - 1} }, {{\boldsymbol{C}}_{ { {k} } - 1|{ {k} } - 1} }, {\boldsymbol{F}}_{ {k} }^{{\rm{p}}} , {\boldsymbol{Q}}_{ {k} }^{{\rm{p}}}$ 步骤1 预测 for$ {{ }}k = 1{{ : }}N $ ${\boldsymbol{x} }_{ { {k} }|{ {k} } - 1}^{\rm{ {f} } } = { {\boldsymbol{F} }^{ {\rm{f} } } }{\boldsymbol{x} }_{ { {k} } - 1|{ {k} } - 1}^{{\rm{f}}}$; ${{\boldsymbol{P}}_{ { {k} }|{ {k} } - 1} } = {{\boldsymbol{F}}^{\rm{f}}}{{\boldsymbol{P}}_{ { {k} } - 1|{ {k} } - 1} }{({{\boldsymbol{F}}^{\rm{f}}})^{{\rm{T}}} } + {{\boldsymbol{Q}}_{ {k} } }$; 根据式(10)—式(11),计算得到$ {{k}} $时刻扩展形状参数的预测值; ${{\boldsymbol{C}}_{ { {k} }|{ {k} } - 1} } = {\boldsymbol{F}}_{ {k} }^{{\rm{p}}} {{\boldsymbol{C}}_{ { {k} } - 1|{ {k} } - 1} }{({\boldsymbol{F}}_{ {k} }^{{\rm{p}}} )^{{\rm{T}}} } + {\boldsymbol{Q}}_{ {k} }^{{\rm{p}}}$; end for 步骤2 更新 for $ k = 1:N $ for $ {{ }}j = 1:{\rm{num}} $ 根据式(43)计算$ k $时刻边界形状函数最大值; 计算伪量测方程传递后的样本点$ h_{k,j}^* $; 根据式(47)—式(52),更新扩展形状参数${\boldsymbol{x}}_{ {k} }^{{\rm{p}}}$和协方差${{\boldsymbol{C}}_{ { {k} }|{ {k} } } }$; end for end for 输出:${\boldsymbol{x}}_{ {k} }^{{\rm{p}}} , {{\boldsymbol{C}}_{ { {k} }|{ {k} } } }$  下载: 导出CSV
下载: 导出CSV
算法2 面积差算法 输入:$ {{x,}}{{y,}}{{X,}}{{Y}} $ ${ {\rm{poly} } } 1 = { {\rm{polyshape} } } ({{x} },{{y} })$; ${{\rm{poly}}} 2 = {{\rm{polyshape}}} ({{X} },{{Y} })$; ${{\rm{intpoly}}} = {{\rm{intersect}}} ({{\rm{poly}}} 1,{{\rm{poly}}} 2)$; ${{\rm{intarea}}} = {{\rm{polyarea}}} ({{\rm{intpoly}}} (:,1),{{\rm{intpoly}}} (:,2))$; ${{\rm{unipoly}}} = { {\rm{union} } } ({ {\rm{poly} } } 1,{ {\rm{poly} } } 2)$; ${{\rm{uniarea}}} = {{\rm{polyarea}}} ({{\rm{unipoly}}} (:,1),{{\rm{unipoly}}} (:,2))$; ${ {\rm{trueshape} } } = { {\rm{polyarea} } } ({{X,Y} })$; 根据式(54), 计算面积误差$\epsilon$。 输出:$\epsilon$
下载: 导出CSV
-
[1] TUNCER B and ÖZKAN E. Random matrix based extended target tracking with orientation: A new model and inference[J]. IEEE Transactions on Signal Processing, 2021, 69: 1910–1923. doi: 10.1109/TSP.2021.3065136 [2] GRANSTRÖM K, BAUM M, and REUTER S. Extended object tracking: Introduction, overview, and applications[J]. Journal of Advances in Information Fusion, 2017, 12(2): 139–174. [3] YANG Shishan, TEICH F, and BAUM M. Network flow labeling for extended target tracking PHD filters[J]. IEEE Transactions on Industrial Informatics, 2019, 15(7): 4164–4171. doi: 10.1109/TII.2019.2898992 [4] BARTLETT N J, RENTON C, and WILLS A G. A closed-form prediction update for extended target tracking using random matrices[J]. IEEE Transactions on Signal Processing, 2020, 68: 2404–2418. doi: 10.1109/TSP.2020.2984390 [5] GRANSTRÖM K and BRAMSTÅNG J. Bayesian smoothing for the extended object random matrix model[J]. IEEE Transactions on Signal Processing, 2019, 67(14): 3732–3742. doi: 10.1109/TSP.2019.2920471 [6] AFTAB W, HOSTETTLER R, DE FREITAS A, et al. Spatio-temporal Gaussian process models for extended and group object tracking with irregular shapes[J]. IEEE Transactions on Vehicular Technology, 2019, 68(3): 2137–2151. doi: 10.1109/TVT.2019.2891006 [7] DANIYAN A, LAMBOTHARAN S, DELIGIANNIS A, et al. Bayesian multiple extended target tracking using labeled random finite sets and splines[J]. IEEE Transactions on Signal Processing, 2018, 66(22): 6076–6091. doi: 10.1109/TSP.2018.2873537 [8] AKBARI B and ZHU Haibin. Tracking dependent extended targets using multi-output spatiotemporal Gaussian processes[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(10): 18301–18314. doi: 10.1109/TITS.2022.3154926 [9] LU Zhejun, HU Weidong, LIU Yongxiang, et al. Seamless group target tracking using random finite sets[J]. Signal Processing, 2020, 176: 107683. doi: 10.1016/j.sigpro.2020.107683 [10] 汪云, 胡国平, 甘林海. 基于多模型GGIW-CPHD滤波的群目标跟踪算法[J]. 华中科技大学学报:自然科学版, 2017, 45(2): 89–94. doi: 10.13245/j.hust.170217WANG Yun, HU Guoping, and GAN Linhai. Group targets tracking algorithm using a multiple models Gaussian inverse Wishart CPHD filter[J]. Journal of Huazhong University of Science and Technology:Natural Science Edition, 2017, 45(2): 89–94. doi: 10.13245/j.hust.170217 [11] 陈辉, 杜金瑞, 韩崇昭. 基于星凸形随机超曲面模型多扩展目标多伯努利滤波器[J]. 自动化学报, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130CHEN Hui, DU Jinrui, and HAN Chongzhao. A multiple extended target multi-Bernouli filter based on star-convex random hypersurface model[J]. Acta Automatica Sinica, 2020, 46(5): 909–922. doi: 10.16383/j.aas.c180130 [12] LIU Ben, THARMARASA R, JASSEMI R, et al. Extended target tracking with multipath detections, terrain-constrained motion model and clutter[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(11): 7056–7072. doi: 10.1109/TITS.2020.3001174 [13] ZHU Hongyan, HAN Chongzhao, and LI Chen. An extended target tracking method with random finite set observations[C]. The 14th International Conference on Information Fusion, Chicago, USA, 2011: 1–6. [14] YANG Shishan and BAUM M. Tracking the orientation and axes lengths of an elliptical extended object[J]. IEEE Transactions on Signal Processing, 2019, 67(18): 4720–4729. doi: 10.1109/TSP.2019.2929462 [15] ALQADERI H, GOVAERS F, and SCHULZ R. Spacial elliptical model for extended target tracking using laser measurements[C]. 2019 Sensor Data Fusion: Trends, Solutions, Applications, Bonn, Germany, 2019: 1–6. [16] 李翠芸, 林锦鹏, 姬红兵. 一种基于椭圆RHM的扩展目标Gamma高斯混合CPHD滤波器[J]. 控制与决策, 2015, 30(9): 1551–1558. doi: 10.13195/j.kzyjc.2014.0877LI Cuiyun, LIN Jinpeng, and JI Hongbing. A Gamma Gaussian-mixture CPHD filter based on ellipse random hypersurface models for extended targets[J]. Control and Decision, 2015, 30(9): 1551–1558. doi: 10.13195/j.kzyjc.2014.0877 [17] FOWDUR J S, BAUM M, and HEYMANN F. An elliptical principal axes-based model for extended target tracking with marine radar data[C]. 2021 IEEE 24th International Conference on Information Fusion, Sun City, South Africa, 2021: 1–8. [18] BAUM M, NOACK B, and HANEBECK U D. Extended object and group tracking with elliptic random hypersurface models[C]. 2010 13th International Conference on Information Fusion, Edinburgh, UK, 2010: 1–8. [19] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362 [20] LAN Jian and LI Xiaorong. Tracking of extended object or target group using random matrix – part II: Irregular object[C]. 2012 15th International Conference on Information Fusion, Singapore, 2012: 2185–2192. [21] LAN Jian and LI Xiaorong. Tracking of maneuvering non-ellipsoidal extended object or target group using random matrix[J]. IEEE Transactions on Signal Processing, 2014, 62(9): 2450–2463. doi: 10.1109/TSP.2014.2309561 [22] BAUM M and HANEBECK U D. Extended object tracking with random hypersurface models[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 149–159. doi: 10.1109/TAES.2013.120107 [23] WAHLSTRÖM N and ÖZKAN E. Extended target tracking using Gaussian processes[J]. IEEE Transactions on Signal Processing, 2015, 63(16): 4165–4178. doi: 10.1109/TSP.2015.2424194 [24] ZEA A, FAION F, BAUM M, et al. Level-set random hypersurface models for tracking nonconvex extended objects[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(6): 2990–3007. doi: 10.1109/TAES.2016.130704 [25] JIDESH P and BALAJI B. Adaptive non-local level-set model for despeckling and deblurring of synthetic aperture radar imagery[J]. International Journal of Remote Sensing, 2018, 39(20): 6540–6556. doi: 10.1080/01431161.2018.1460510 [26] ANDREASEN C S, ELINGAARD M O, and AAGE N. Level set topology and shape optimization by density methods using cut elements with length scale control[J]. Structural and Multidisciplinary Optimization, 2020, 62(2): 685–707. doi: 10.1007/s00158-020-02527-1 [27] GUO Yunfei, LI Yong, THARMARASA R, et al. GP-PDA filter for extended target tracking with measurement origin uncertainty[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(4): 1725–1742. doi: 10.1109/TAES.2018.2875555 [28] KUMRU M and ÖZKAN E. 3D extended object tracking using recursive Gaussian processes[C]. 2018 21st International Conference on Information Fusion, Cambridge, UK, 2018: 1–8. [29] 陈辉, 李国财, 韩崇昭, 等. 高斯过程回归模型多扩展目标多伯努利滤波器[J]. 控制理论与应用, 2020, 37(9): 1931–1943. doi: 10.7641/CTA.2020.90978CHEN Hui, LI Guocai, HAN Chongzhao, et al. A multiple extended target multi-Bernouli filter based on Gaussian process regression model[J]. Control Theory &Applications, 2020, 37(9): 1931–1943. doi: 10.7641/CTA.2020.90978 [30] NAUJOKS B, BURGER P, and WUENSCHE H J. Fast 3D extended target tracking using NURBS surfaces[C]. 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 2019: 1104–1109. [31] THORMANN K, BAUM M, and HONER J. Extended target tracking using Gaussian processes with high-resolution automotive radar[C]. 2018 21st International Conference on Information Fusion, Cambridge, UK, 2018: 1764–1770. -

 下载:
下载:





图(10) / 表(2)
计量
- 文章访问数: 1290
- HTML全文浏览量: 791
- PDF下载量: 113
- 被引次数: 0
