

Air-ground Cooperative UAV Formation Control Algorithm Design and Simulation for Relay Communications
-
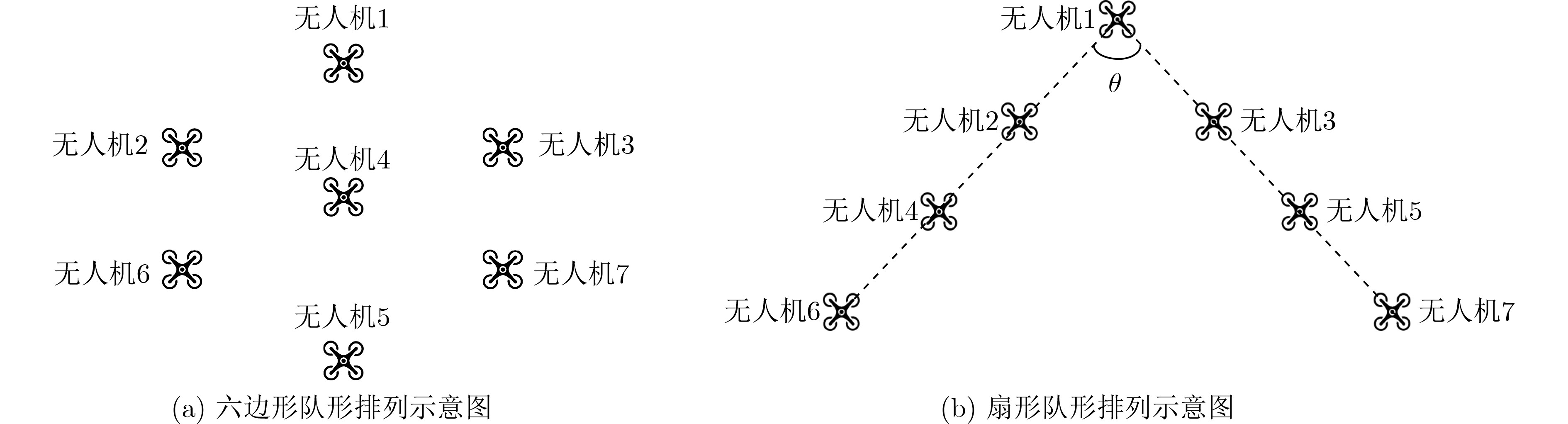
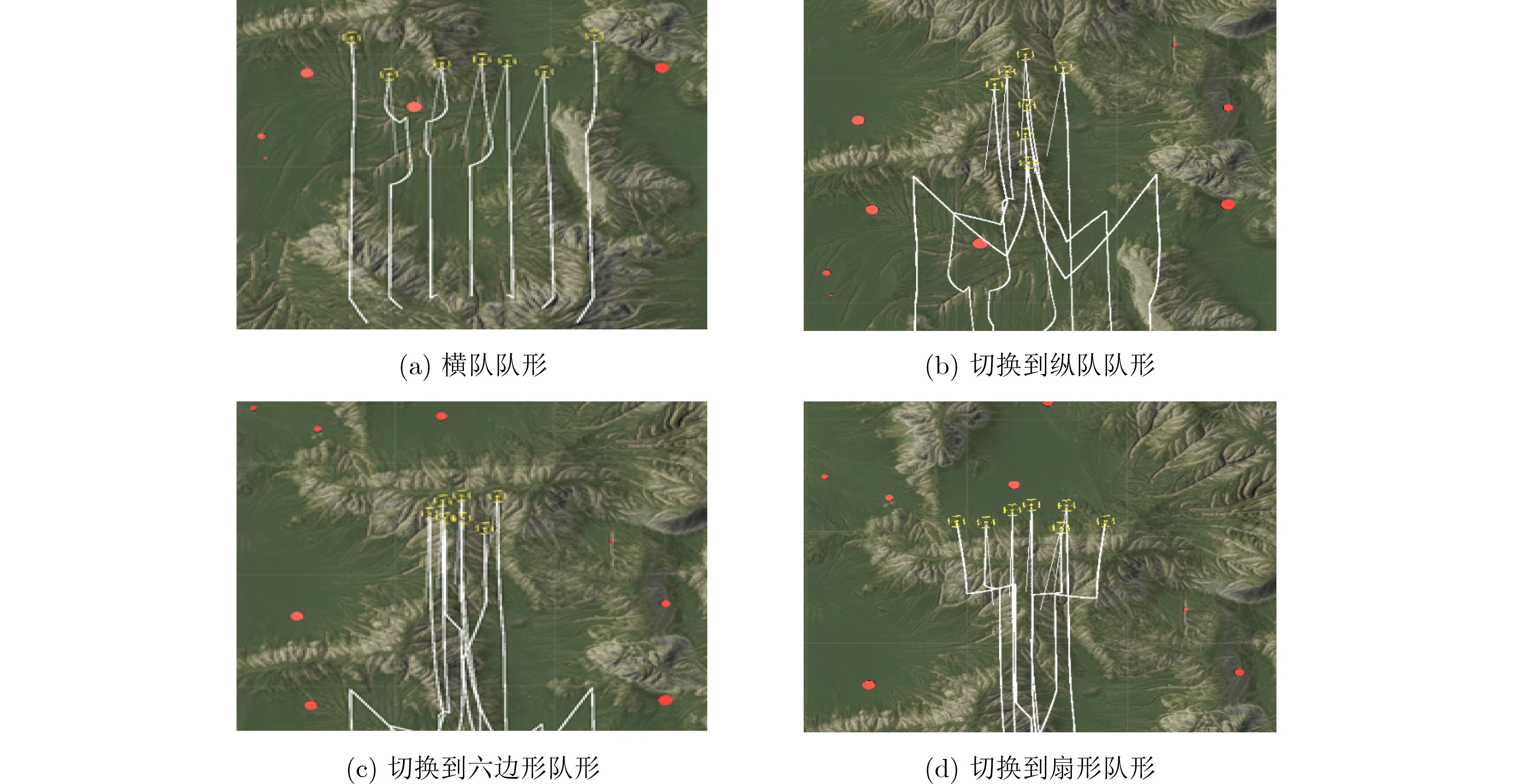
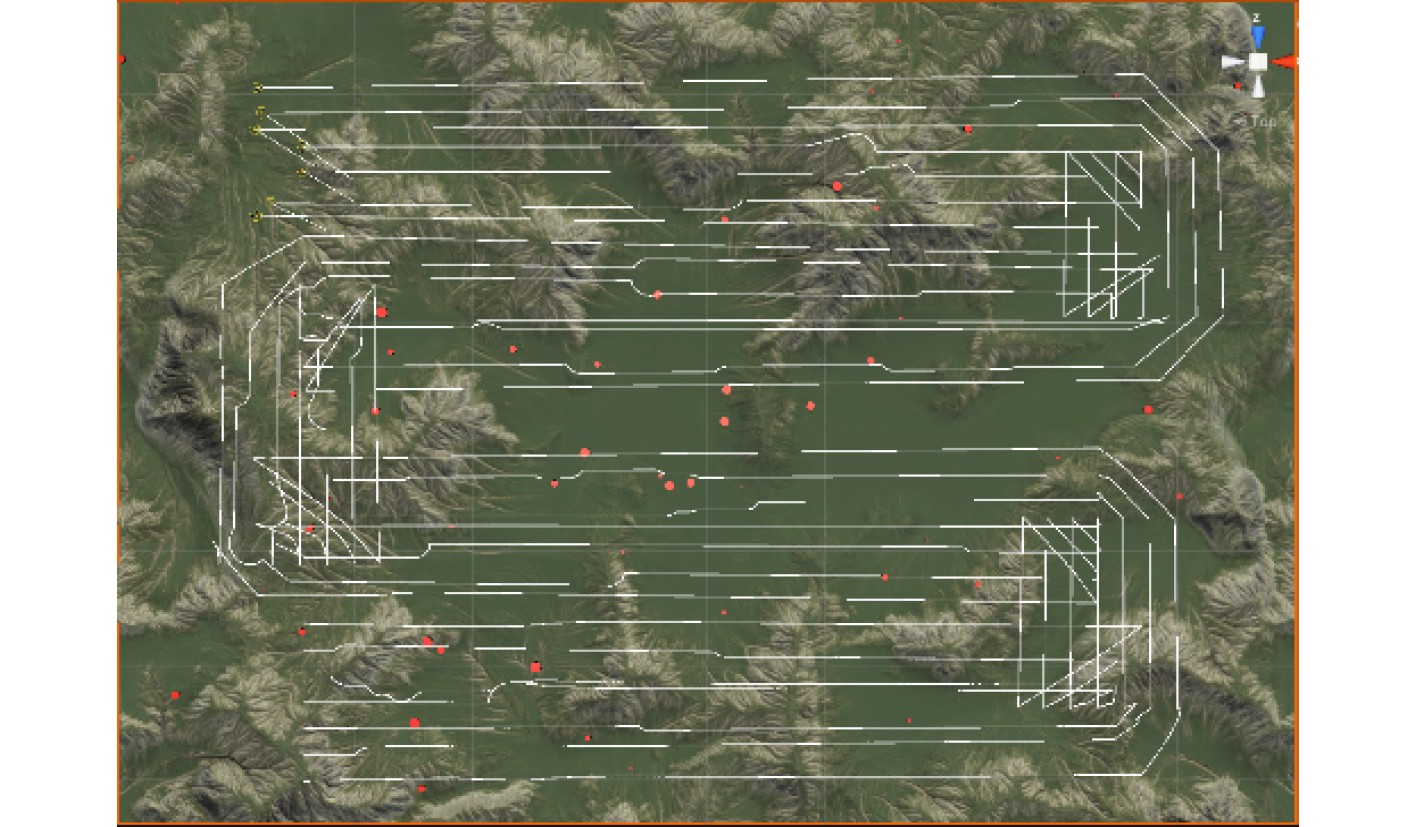
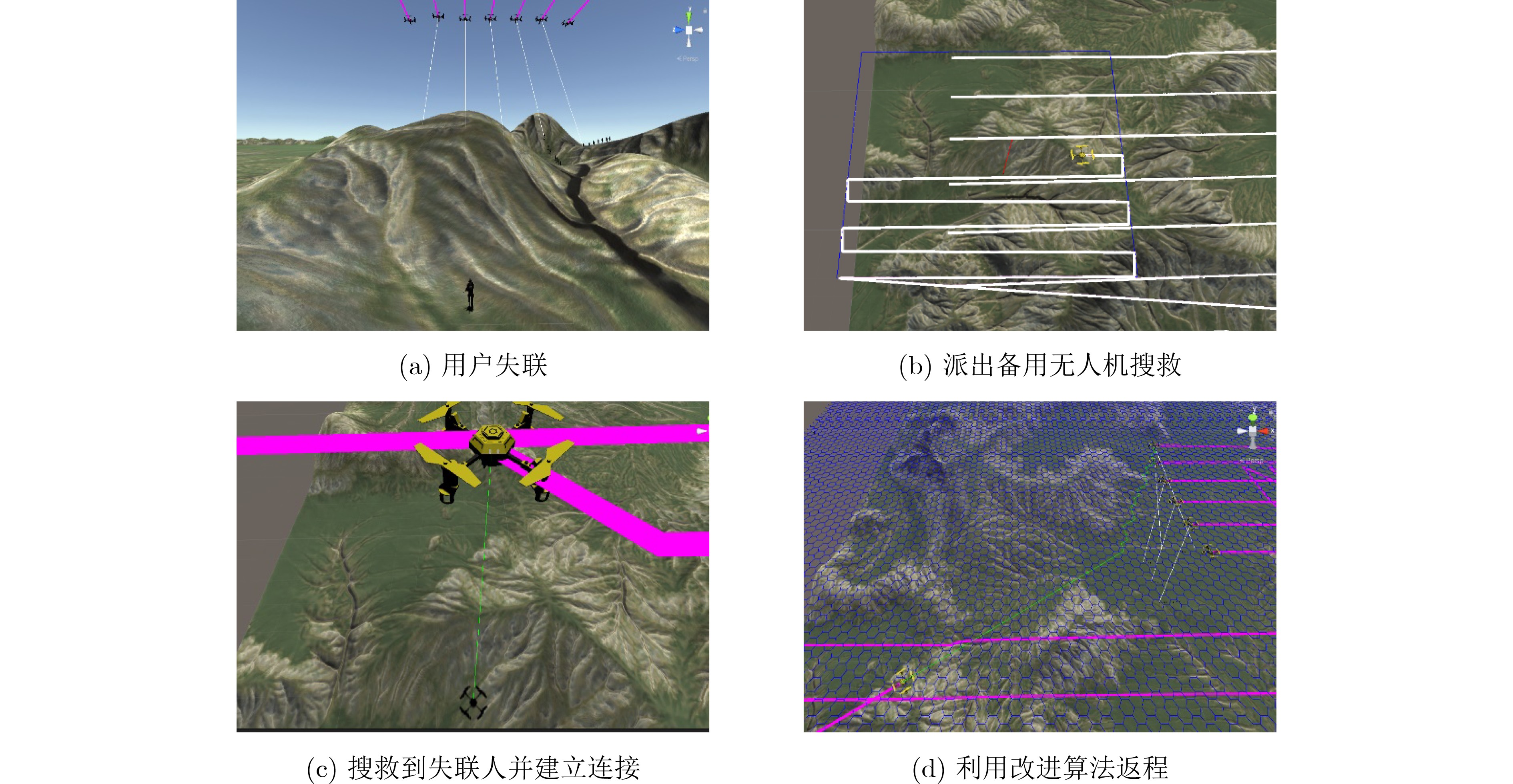
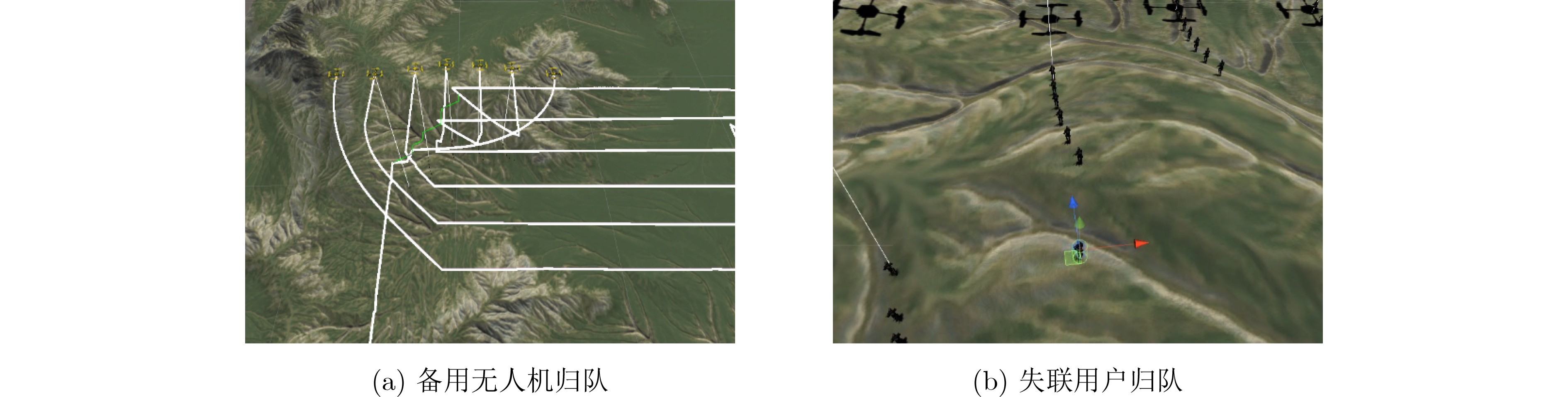
摘要: 随着无人机(UAV)应用场景的不断丰富,近年来利用无人机编队实现空地协同的任务日益增多。根据现阶段的编队体系和控制方法,该文设计一种基于行为策略的空地协同无人机编队控制算法:通过引入空地协同思想,为地面移动用户提供中继通信服务,扩大了无人机编队的通信覆盖范围。为7架无人机组成的编队设计了4种无人机队形,推导相应的单位中心站位标准,并使用Unity软件对空地协同无人机编队控制算法进行仿真,测试使用该算法的无人机编队在理想环境下的转弯性能和模拟实际环境下的避障、中继通信以及队形变化能力。基于所提出的空地协同算法,设计了两种任务方案:区域搜索覆盖主任务方案和用户失联搜救应急方案。实验仿真证明了改进的空地协同无人机编队控制算法及两种方案具有可行性。Abstract: With the continuous enrichment of Unmanned Aerial Vehicles (UAV) application scenarios, in recent years, the use of UAV formation to achieve air-ground coordination tasks is increasing. According to the current formation systems and control methods, an air-ground collaborative UAV formation control algorithm based on behavior strategy is designed: by introducing the idea of air-ground collaboration, it provides relay communication services for ground moving users and expands the communication coverage of UAV formations. Four UAV formations are designed for the formation of seven UAVs, the corresponding unit center position standards are derived, and the air-ground collaborative UAV formation control algorithm is simulated by the Unity software. The turning performance of the UAV formation using the algorithm is tested in the ideal environment and the obstacle avoidance, relay communication and formation change capabilities are tested in the simulated actual environment. Based on the proposed air-ground cooperative algorithm, two mission schemes are designed: the main mission scheme of regional search coverage, user lost contact search and rescue crash plan. Theoretical analysis and experimental simulation show that the algorithm and three schemes are feasible.
-
表 2 仿真参数设定
无人机参数 设定值 无人机参数 设定值 最高速度(m/s) 5.0 避障行为最大边界值d2max(m) 10.0 最高加速度(m/s2) 2.0 避障行为最小边界值d2min(m) 5.0 机间标准距离d0(m) 20.0 队形保持行为最大边界值d3max(m) 25.0 奔向目标行为增益值g1 0.8 队形保持行为最小边界值d3min(m) 2.0 避开障碍行为增益值g2 1.5 机间防撞行为最大边界值d4max(m) 5.0 队形保持行为增益值g3 1.0 机间防撞行为最小边界值d4min(m) 3.0 机间防撞行为增益值g4 2.0 中继通信行为最大边界值d5max(m) 60.0 中继通信行为增益值g5 1.5 中继通信行为最小边界值d5min(m) 25.0  下载: 导出CSV
下载: 导出CSV
表 3 理想环境下仿真结果
无人机编队队形 行进时间(s) 队形保持率(%) 横队队形 92.98 92.25 纵队队形 58.36 93.83 六边形队形 76.07 98.33 扇形队形 82.30 93.21
下载: 导出CSV
表 4 区域平行搜索方案搜索用时结果信息表
无人机编队队形 搜索用时 队形保持率(%) 横队队形 25分 01 秒 89.57 纵队队形 3时04分31秒 88.24 六边形队形 1时12分13秒 90.28 扇形队形 33分43秒 87.29
下载: 导出CSV
-
[1] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics &Information Technology, 2022, 44(3): 781–789. doi: 10.11999/JEIT210789 [2] CUI Zhenhua, YANG Tao, WU Xiaofeng, et al. The learning stimulated sensing-transmission coordination via age of updates in distributed UAV swarm (invited paper)[C]. 2021 17th International Symposium on Wireless Communication Systems, Berlin, Germany, 2021: 1–6. [3] FU Xiaowei, PAN Jing, WANG Haixiang, et al. A formation maintenance and reconstruction method of UAV swarm based on distributed control with obstacle avoidance[C]. 2019 Australian & New Zealand Control Conference, Auckland, New Zealand, 2019: 205–209. [4] BELFO J P, AGUIAR A P, and LEMOS J M. Distributed inverse optimal control for discrete-time nonlinear multi-agent systems[J]. IEEE Control Systems Letters, 2021, 5(6): 2096–2101. doi: 10.1109/LCSYS.2021.3050093 [5] FORTE P, MANNUCCI A, ANDREASSON H, et al. Online task assignment and coordination in multi-robot fleets[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4584–4591. doi: 10.1109/LRA.2021.3068918 [6] GAUTAM A and MOHAN S. A review of research in multi-robot systems[C]. 2012 IEEE 7th International Conference on Industrial and Information Systems, Chennai, India, 2012: 1–5. [7] YU Xue, CHEN Weineng, HU Xiaomin, et al. Path planning in multiple-AUV systems for difficult target traveling missions: A hybrid metaheuristic approach[J]. IEEE Transactions on Cognitive and Developmental Systems, 2020, 12(3): 561–574. doi: 10.1109/TCDS.2019.2944945 [8] PARKER L E. ALLIANCE: An architecture for fault tolerant multirobot cooperation[J]. IEEE Transactions on Robotics and Automation, 1998, 14(2): 220–240. doi: 10.1109/70.681242 [9] SHEN Jie, WANG Li, LIN Jinguo, et al. Formation control for multiple mobile robots based on leader-following schema[C]. 2008 27th IEEE Chinese Control Conference, Kunming, China, 2008: 207–211. doi: 10.1109/CHICC.2008.4605305. [10] ANTONELLI G, ARRICHIELLO F, and CHIAVERINI S. Experiments of formation control with multirobot systems using the null-space-based behavioral control[J]. IEEE Transactions on Control Systems Technology, 2009, 17(5): 1173–1182. doi: 10.1109/TCST.2008.2004447 [11] BALCH T and ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE Transactions on Robotics and Automation, 1998, 14(6): 926–939. doi: 10.1109/70.736776 [12] OH J S, CHOI Y H, PARK J B, et al. Complete coverage navigation of cleaning robots using triangular-cell-based map[J]. IEEE Transactions on Industrial Electronics, 2004, 51(3): 718–726. doi: 10.1109/TIE.2004.825197 [13] WONG S C and MACDONALD B A. A topological coverage algorithm for mobile robots[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems, Las Vegas, USA, 2003: 1685–1690. -

 下载:
下载:







图(11) / 表(4)
计量
- 文章访问数: 1711
- HTML全文浏览量: 1081
- PDF下载量: 204
- 被引次数: 0
