

Wideband Channel Estimation for Multiuser Communication Based on Reconfigurable Intelligent Surface Assisted
-
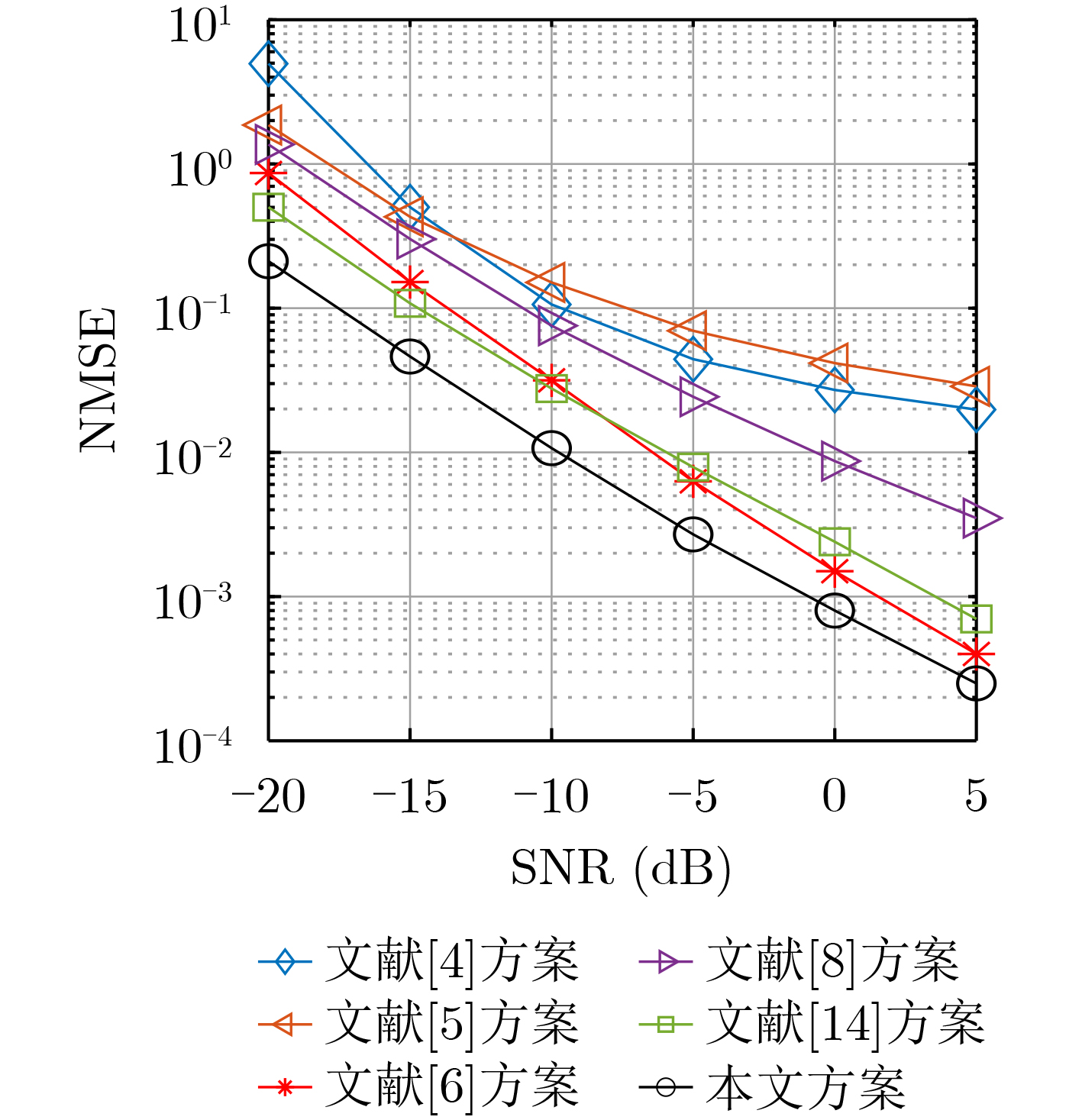
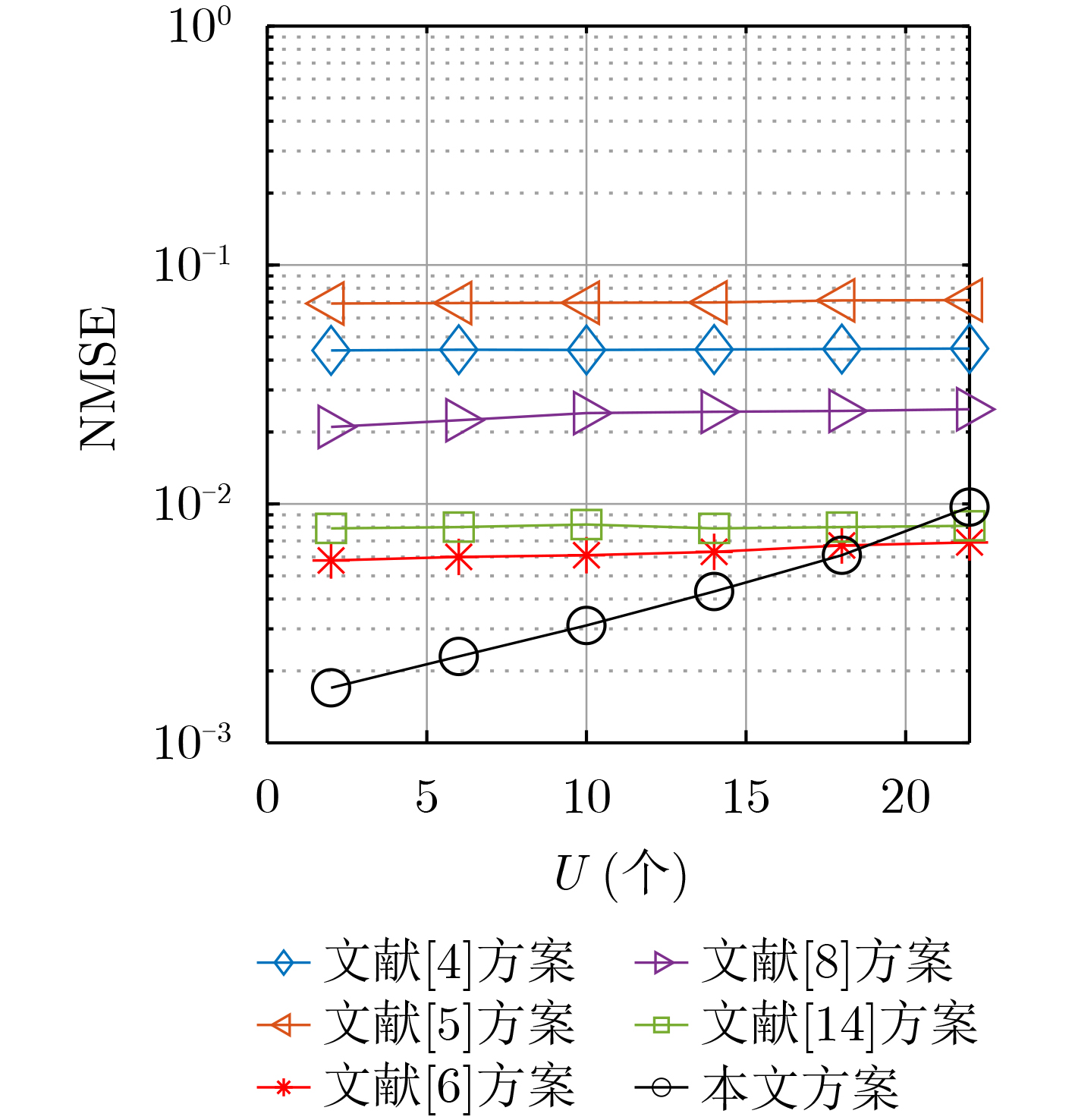
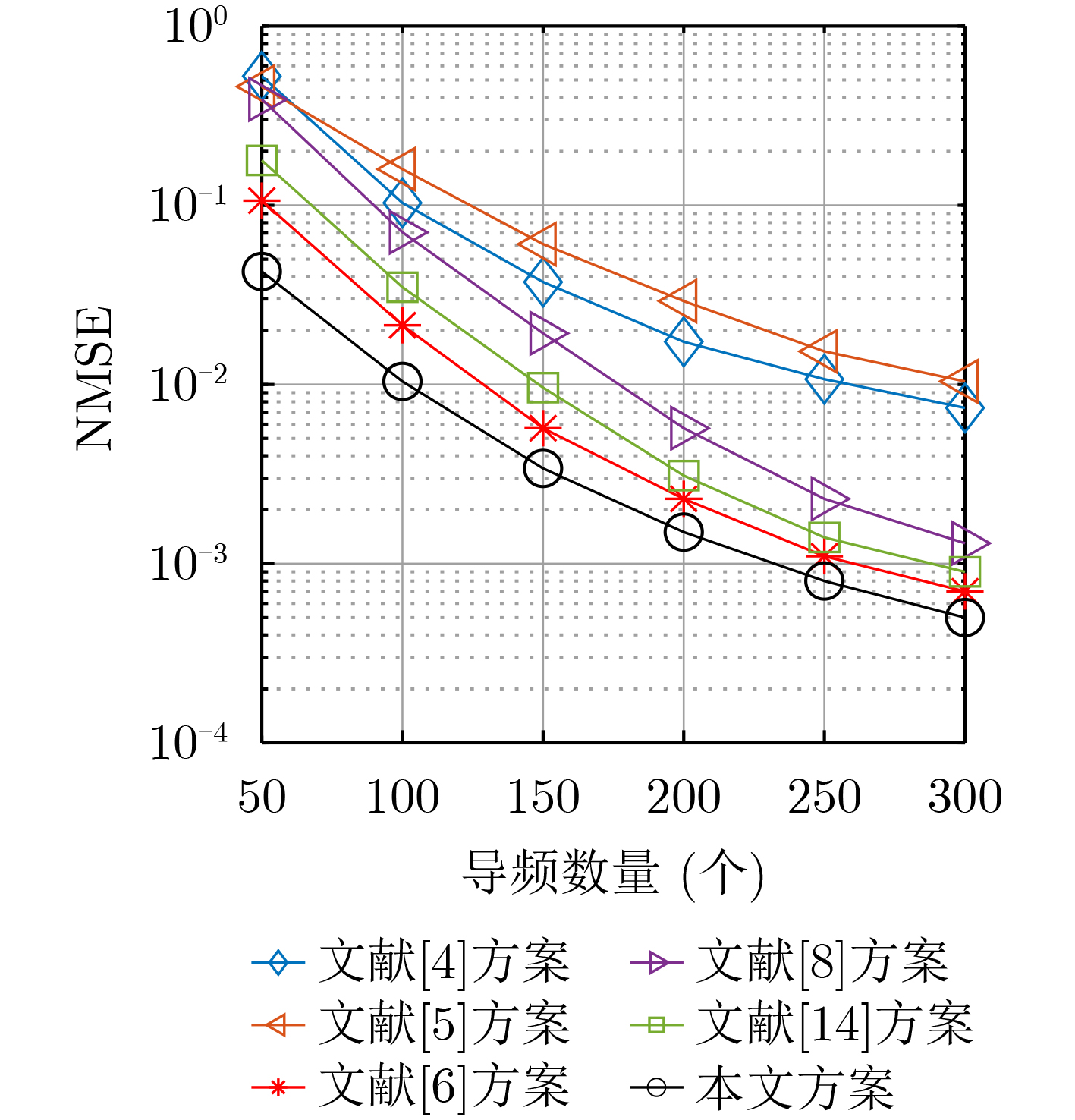
摘要: 针对太赫兹(THz)链路的严重传输衰减和宽带系统中波束斜视导致传统信道估计方案性能下降的问题,该文构建了可重构智能表面(RIS)辅助多用户THz通信模型,并提出一种低复杂度的两阶段级联信道估计方案。在第1阶段,利用THz的稀疏性和对数和函数,将信道估计问题转化为目标优化问题,通过梯度下降法优化目标函数,使待估信道参数迭代逼近最优解,从而估计出典型用户级联信道;在第2阶段,利用其他用户的级联信道与典型用户信道的强相关性,以较低的导频开销来估计其他用户的级联信道。仿真结果表明,所提方案相较于其他方案具有更好的性能。Abstract: To solve the problem of severe transmission attenuation of TeraHertz (THz) links, and the performance degradation of traditional channel estimation schemes caused by beam squint in wideband systems, a multi-user THz communication model assisted by Reconfigurable Intelligent Surfaces (RIS) is constructed in this paper, and a low complexity two-stage cascaded channel estimation scheme is proposed. In the first stage, the channel estimation problem is transformed into an objective optimization problem by using the sparsity of the THz and log-sum function, and the objective function is optimized by gradient descent method, so that the channel parameters to be estimated are iteratively close to the optimal solution, thus the typical user cascade channel is estimated. In the second stage, the cascade channels of other users are estimated with lower pilot overhead by using the strong correlation between the cascade channels of other users and the typical user channel. The simulation results show that the proposed scheme has better performance than other schemes.
-
[1] CHEN Hui, SARIEDDEEN H, BALLAL T, et al. A tutorial on terahertz-band localization for 6G communication systems[J]. IEEE Communications Surveys & Tutorials, 2022, 24(3): 1780–1815. doi: 10.1109/COMST.2022.3178209 [2] 李斌, 刘文帅, 谢万城, 等. 智能超表面赋能移动边缘计算部分任务卸载策略[J]. 电子与信息学报, 2022, 44(7): 2309–2316. doi: 10.11999/JEIT211595LI Bin, LIU Wenshuai, XIE Wancheng, et al. Partial computation offloading for double-RIS assisted multi-user mobile edge computing networks[J]. Journal of Electronics &Information Technology, 2022, 44(7): 2309–2316. doi: 10.11999/JEIT211595 [3] WAN Ziwei, GAO Zhen, GAO Feifei, et al. Terahertz massive MIMO with holographic reconfigurable intelligent surfaces[J]. IEEE Transactions on Communications, 2021, 69(7): 4732–4750. doi: 10.1109/TCOMM.2021.3064949 [4] WAN Ziwei, GAO Zhen, and ALOUINI M S. Broadband channel estimation for intelligent reflecting surface aided mmWave massive MIMO systems[C]. ICC 2020 - 2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 2020: 1–6. [5] LIN Tian, YU Xianghao, ZHU Yu, et al. Channel estimation for IRS-assisted millimeter-wave MIMO systems: Sparsity-inspired approaches[J]. IEEE Transactions on Communications, 2022, 70(6): 4078–4092. doi: 10.1109/TCOMM.2022.3168876 [6] SCHROEDER R, HE Jiguang, BRANTE G, et al. Two-stage channel estimation for hybrid RIS assisted MIMO systems[J]. IEEE Transactions on Communications, 2022, 70(7): 4793–4806. doi: 10.1109/TCOMM.2022.3176654 [7] ZHENG Beixiong, YOU Changsheng, MEI Weidong, et al. A survey on channel estimation and practical passive beamforming design for intelligent reflecting surface aided wireless communications[J]. IEEE Communications Surveys & Tutorials, 2022, 24(2): 1035–1071. doi: 10.1109/COMST.2022.3155305 [8] HU Chen, DAI Linglong, HAN Shuangfeng, et al. Two-timescale channel estimation for reconfigurable intelligent surface aided wireless communications[J]. IEEE Transactions on Communications, 2021, 69(11): 7736–7747. doi: 10.1109/TCOMM.2021.3072729 [9] JEONG S, FARHANG A, PEROVIC N S, et al. Low-complexity joint CFO and channel estimation for RIS-aided OFDM systems[J]. IEEE Wireless Communications Letters, 2022, 11(1): 203–207. doi: 10.1109/LWC.2021.3124049 [10] LIU Shicong, GAO Zhen, ZHANG Jun, et al. Deep denoising neural network assisted compressive channel estimation for mmWave intelligent reflecting surfaces[J]. IEEE Transactions on Vehicular Technology, 2020, 69(8): 9223–9228. doi: 10.1109/TVT.2020.3005402 [11] LIN Yuxing, JIN Shi, MATTHAIOU M, et al. Tensor-based algebraic channel estimation for hybrid IRS-assisted MIMO-OFDM[J]. IEEE Transactions on Wireless Communications, 2021, 20(6): 3770–3784. doi: 10.1109/TWC.2021.3053580 [12] SONG Yuhui, GONG Zijun, CHEN Yuanzhu, et al. Efficient channel estimation for wideband millimeter wave massive MIMO systems with beam squint[J]. IEEE Transactions on Communications, 2022, 70(5): 3421–3435. doi: 10.1109/TCOMM.2022.3156065 [13] WANG Bolei, GAO Feifei, JIN Shi, et al. Spatial- and frequency-wideband effects in millimeter-wave massive MIMO systems[J]. IEEE Transactions on Signal Processing, 2018, 66(13): 3393–3406. doi: 10.1109/TSP.2018.2831628 [14] WANG Zhaorui, LIU Liang, and CUI Shuguang. Channel estimation for intelligent reflecting surface assisted multiuser communications: Framework, algorithms, and analysis[J]. IEEE Transactions on Wireless Communications, 2020, 19(10): 6607–6620. doi: 10.1109/TWC.2020.3004330 [15] MA Siqi, SHEN Wenqian, AN Jianping, et al. Wideband channel estimation for IRS-aided systems in the face of beam squint[J]. IEEE Transactions on Wireless Communications, 2021, 20(10): 6240–6253. doi: 10.1109/TWC.2021.3072694 [16] ZHOU Gui, PAN Cunhua, REN Hong, et al. Channel estimation for RIS-aided multiuser millimeter-wave systems[J]. IEEE Transactions on Signal Processing, 2022, 70: 1478–1492. doi: 10.1109/TSP.2022.3158024 [17] LIU Yushan, ZHANG Shun, GAO Feifei, et al. Cascaded channel estimation for RIS assisted mmWave MIMO transmissions[J]. IEEE Wireless Communications Letters, 2021, 10(9): 2065–2069. doi: 10.1109/LWC.2021.3092147 [18] SHEN Yanning, FANG Jun, and LI Hongbin. Exact reconstruction analysis of log-sum minimization for compressed sensing[J]. IEEE Signal Processing Letters, 2013, 20(12): 1223–1226. doi: 10.1109/LSP.2013.2285579 [19] FANG Jun, WANG Feiyu, SHEN Yanning, et al. Super-resolution compressed sensing for line spectral estimation: An iterative reweighted approach[J]. IEEE Transactions on Signal Processing, 2016, 64(18): 4649–4662. doi: 10.1109/TSP.2016.2572041 [20] HUNTER D R and LANGE K. A tutorial on MM algorithms[J]. The American Statistician, 2004, 58(1): 30–37. doi: 10.1198/0003130042836 [21] WEI Yi, ZHAO Mingmin, ZHAO Minjian, et al. Channel estimation for IRS-aided multiuser communications with reduced error propagation[J]. IEEE Transactions on Wireless Communications, 2022, 21(4): 2725–2741. doi: 10.1109/TWC.2021.3115161 [22] 张贤达. 矩阵分析与应用[M]. 2版. 北京: 清华大学出版社, 2013: 325–327.ZHANG Xianda. Matrix Analysis and Applications[M]. 2nd ed. Beijing: Tsinghua University Press, 2013: 325–327. -

 下载:
下载:



图(4)
计量
- 文章访问数: 979
- HTML全文浏览量: 689
- PDF下载量: 139
- 被引次数: 0
