

Spectral Norm Feature Detection Method in FRFT Domain of Targets in Sea Clutter
-
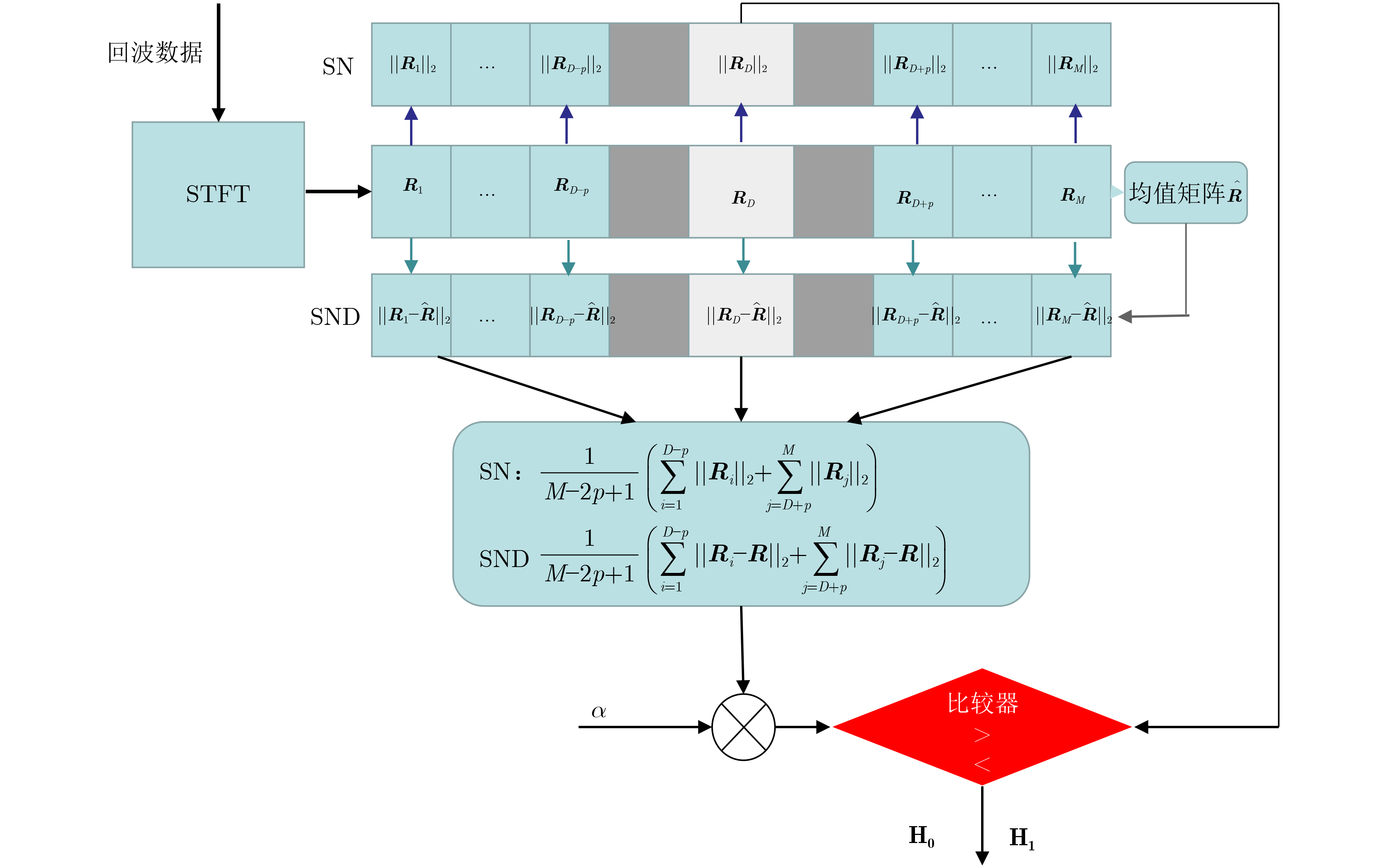
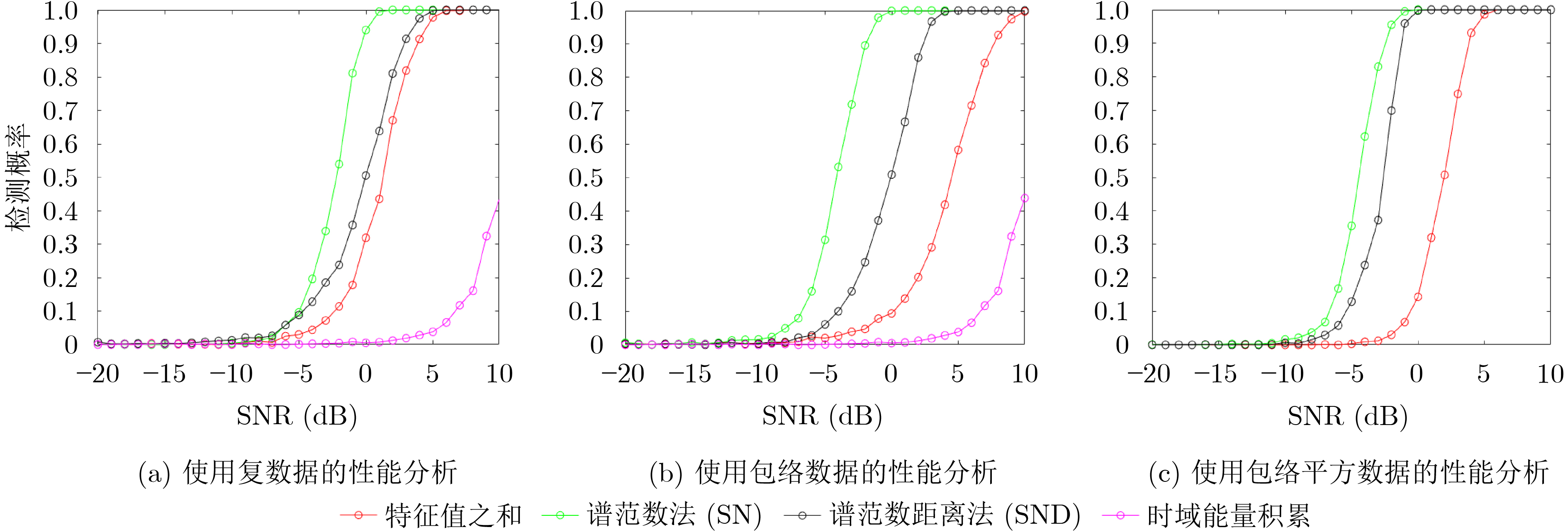
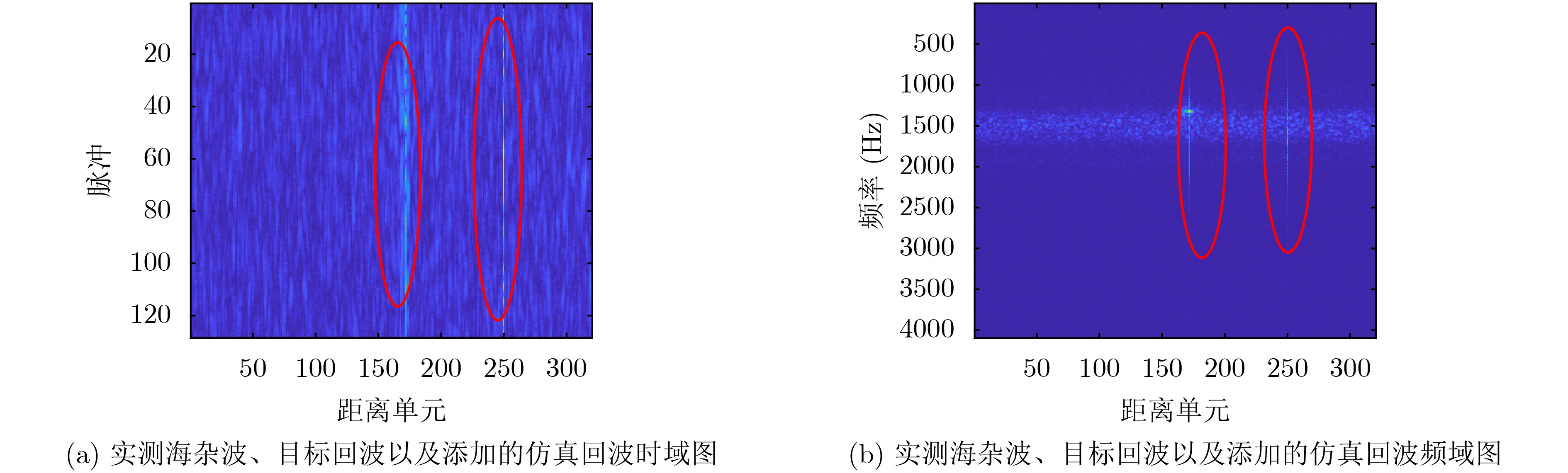
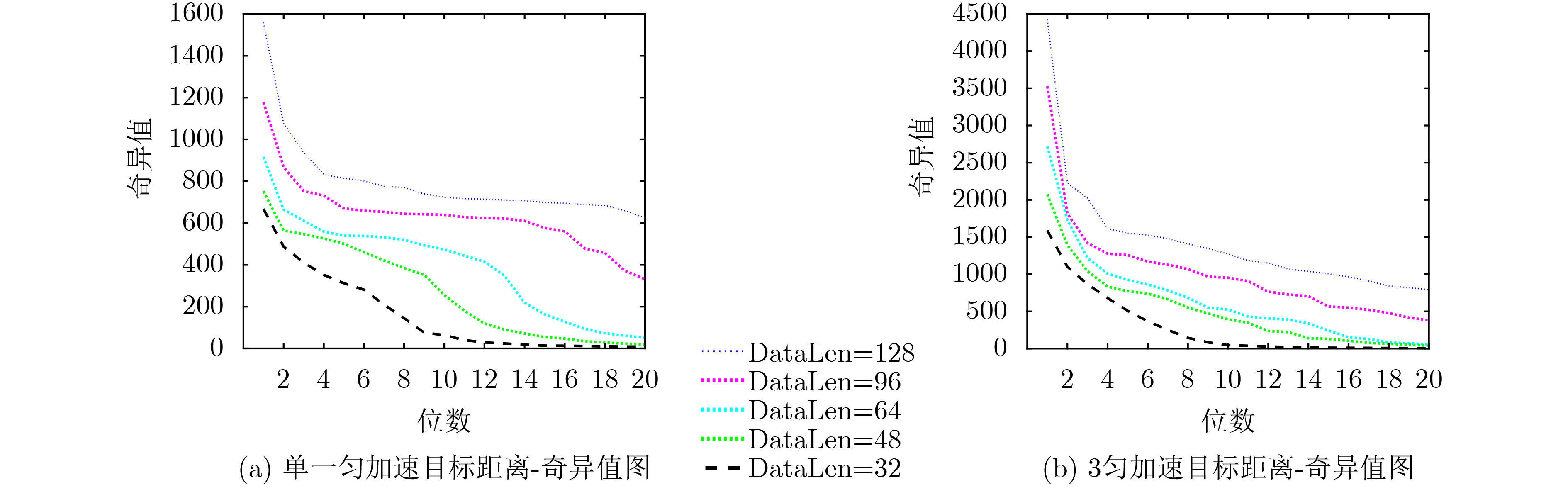
摘要: 对于海上机动目标,采用分数阶傅里叶变换(FRFT)可以很好地解决其回波多普勒谱能量扩散的问题,为了使机动目标回波能量做最佳化的相参积累,需要反复搜索变换阶数,然而由于海上目标机动状态的随机性和时变性,难以搜索得到最佳变换阶数。针对这一问题,该文利用矩阵理论中的奇异值分解实现各变换阶数条件下FRFT谱的特征提取,设计特征检测统计量,提出基于分数阶域奇异值的海杂波抑制与目标检测方法,在增加利用了机动目标在FRFT域形状信息的同时避免了最佳变换阶数搜索。在高斯白噪声仿真数据评估条件下,所提方法在信杂比为–2.5 dB时可以达到60%的检测概率;经过实测数据验证,方法可以在信杂比为4.7 dB的条件下,稳定完成目标检测,具有较好的检测性能,且易于工程化实现。Abstract: In order to optimize the coherent accumulation, repeated searches are required. However, due to the randomness and time variability, it is difficult to search for the optimal transformation order. In order to solve this problem, singular value decomposition in matrix theory is used to realize the feature extraction of FRFT spectrum under the condition of each transformation order, designs feature detection, and proposes sea clutter suppression and target detection based on singular value in the FRFT domain. The method avoids the search for the optimal transformation order while increasing the use of the shape information of the maneuvering target in the FRFT domain. Under the condition of Gaussian white noise simulation data evaluation, the proposed method can achieve a detection probability of 60% when the SNR is –2.5 dB; Verified by the measured data, the method can be stably completed under the condition that the SNR is 4.7 dB Target detection has good detection performance and is easy to implement in engineering.
-
Key words:
- Target detection /
- Sea clutter /
- Singular value decomposition
-
表 1 试验平均飞行参数表
UTC Vel_E(m/s) Vel_N(m/s) Vel_U(m/s) Lon(°) Lat(°) Height(m) 0200-0800 –29.1 0.06 –5.30 121.52 37.62 4432  下载: 导出CSV
下载: 导出CSV
-
[1] 丁昊, 董云龙, 刘宁波, 等. 海杂波特性认知研究进展与展望[J]. 雷达学报, 2016, 5(5): 499–516. doi: 10.12000/JR16069DING Hao, DONG Yunlong, LIU Ningbo, et al. Overview and prospects of research on sea clutter property cognition[J]. Journal of Radars, 2016, 5(5): 499–516. doi: 10.12000/JR16069 [2] 丁昊, 刘宁波, 董云龙, 等. 雷达海杂波测量试验回顾与展望[J]. 雷达学报, 2019, 8(3): 281–302. doi: 10.12000/JR19006DING Hao, LIU Ningbo, DONG Yunlong, et al. Overview and prospects of radar sea clutter measurement experiments[J]. Journal of Radars, 2019, 8(3): 281–302. doi: 10.12000/JR19006 [3] LV Mingjie and ZHOU Chen. Study on sea clutter suppression methods based on a realistic radar dataset[J]. Remote Sensing, 2019, 11(23): 2721. doi: 10.3390/rs11232721 [4] 唐先慧, 李东, 粟嘉, 等. 基于AlexNet的自适应杂波智能抑制方法[J]. 信号处理, 2020, 36(12): 2032–2042. doi: 10.16798/j.issn.1003-0530.2020.12.009TANG Xianhui, LI Dong, SU Jia, et al. An adaptive clutter intelligent suppression method based on AlexNet[J]. Journal of Signal Processing, 2020, 36(12): 2032–2042. doi: 10.16798/j.issn.1003-0530.2020.12.009 [5] PÉREZ-D'ARPINO C and SHAH J A. Fast target prediction of human reaching motion for cooperative human-robot manipulation tasks using time series classification[C]. 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, USA, 2015: 6175–6182. [6] 陈小龙, 刘宁波, 王国庆, 等. 基于高斯短时分数阶Fourier变换的海面微动目标检测方法[J]. 电子学报, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021CHEN Xiaolong, LIU Ningbo, WANG Guoqing, et al. Gaussian short-time fractional Fourier transform based detection algorithm of target with micro-motion at sea[J]. Acta Electronica Sinica, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021 [7] CHEN Zezong, HE Chao, ZHAO Chen, et al. Using SVD-FRFT filtering to suppress first-order sea clutter in HFSWR[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(7): 1076–1080. doi: 10.1109/LGRS.2017.2697458 [8] 刘宁波, 海杂波中目标的变换域分形检测算法研究[D]. [博士论文]. 海军航空工程学院, 2012.LIU Ningbo. Research on fractal detection algorithms of target within sea clutter in transform domain[D]. [Ph.D dissertation]. Naval Academy of Aeronautical Engineering, 2012. [9] SHI Yanling, WANG Lei, and YAO Tingting. Orthogonal projection constant false alarm rate algorithm in fractional domain for small surface targets[J]. IET Signal Processing, 2022, (5): 1–17. [10] 王小谟, 张光义. 雷达与探测—现代战争的火眼金睛[M]. 北京: 国防工业出版社, 2000.WANG Xiaomo and ZHANG Guangyi. Radar and Detection—the Eyes of Modern Warfare[M]. Beijing: National Defense Industry Press, 2000. [11] WANG Xue, LIU Jin, and LIU Hongwei. Small target detection in sea clutter based on Doppler spectrum features[C]. 2006 CIE International Conference on Radar, Shanghai, China, 2006: 1–4. [12] 张坤, 水鹏朗, 王光辉. 相参雷达K分布海杂波背景下非相干积累恒虚警检测方法[J]. 电子与信息学报, 2020, 42(7): 1627–1635. doi: 10.11999/JEIT190441ZHANG Kun, SHUI Penglang, and WANG Guanghui. Non-coherent integration constant false alarm rate detectors against K-distributed sea clutter for coherent radar systems[J]. Journal of Electronics &Information Technology, 2020, 42(7): 1627–1635. doi: 10.11999/JEIT190441 [13] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657 [14] 张贤达. 矩阵分析与应用[M]. 2版. 北京: 清华大学出版社, 2013: 285–323.ZHANG Xianda. Matrix Analysis and Applications[M]. 2nd ed. Beijing: Tsinghua University Press, 2013: 285–323. [15] 赵文静, 金明录, 刘文龙, 等. 基于谱范数的矩阵CFAR检测器[J]. 电子学报, 2019, 47(9): 1951–1956. doi: 10.3969/j.issn.0372-2112.2019.09.019ZHAO Wenjing, JIN Minglu, LIU Wenlong, et al. Matrix CFAR detector based on matrix spectral norm[J]. Acta Electronica Sinica, 2019, 47(9): 1951–1956. doi: 10.3969/j.issn.0372-2112.2019.09.019 [16] 赵文静, 刘畅, 刘文龙, 等. K分布海杂波背景下基于最大特征值的雷达信号检测算法[J]. 电子与信息学报, 2018, 40(9): 2235–2241. doi: 10.11999/JEIT171092ZHAO Wenjing, LIU Chang, LIU Wenlong, et al. Maximum eigenvalue based radar signal detection method for K distribution sea clutter environment[J]. Journal of Electronics &Information, 2018, 40(9): 2235–2241. doi: 10.11999/JEIT171092 [17] ROSS S M. Introduction to Probability and Statistics for Engineers and Scientists[M]. 3rd ed. San Diego: Academic Press, 2004: 182–185. -


 下载:
下载:





图(12) / 表(1)
计量
- 文章访问数: 1016
- HTML全文浏览量: 828
- PDF下载量: 96
- 被引次数: 0
