

Underwater Blue Light Communication UsingVertical-structure GaN Light Emitting Diode
-
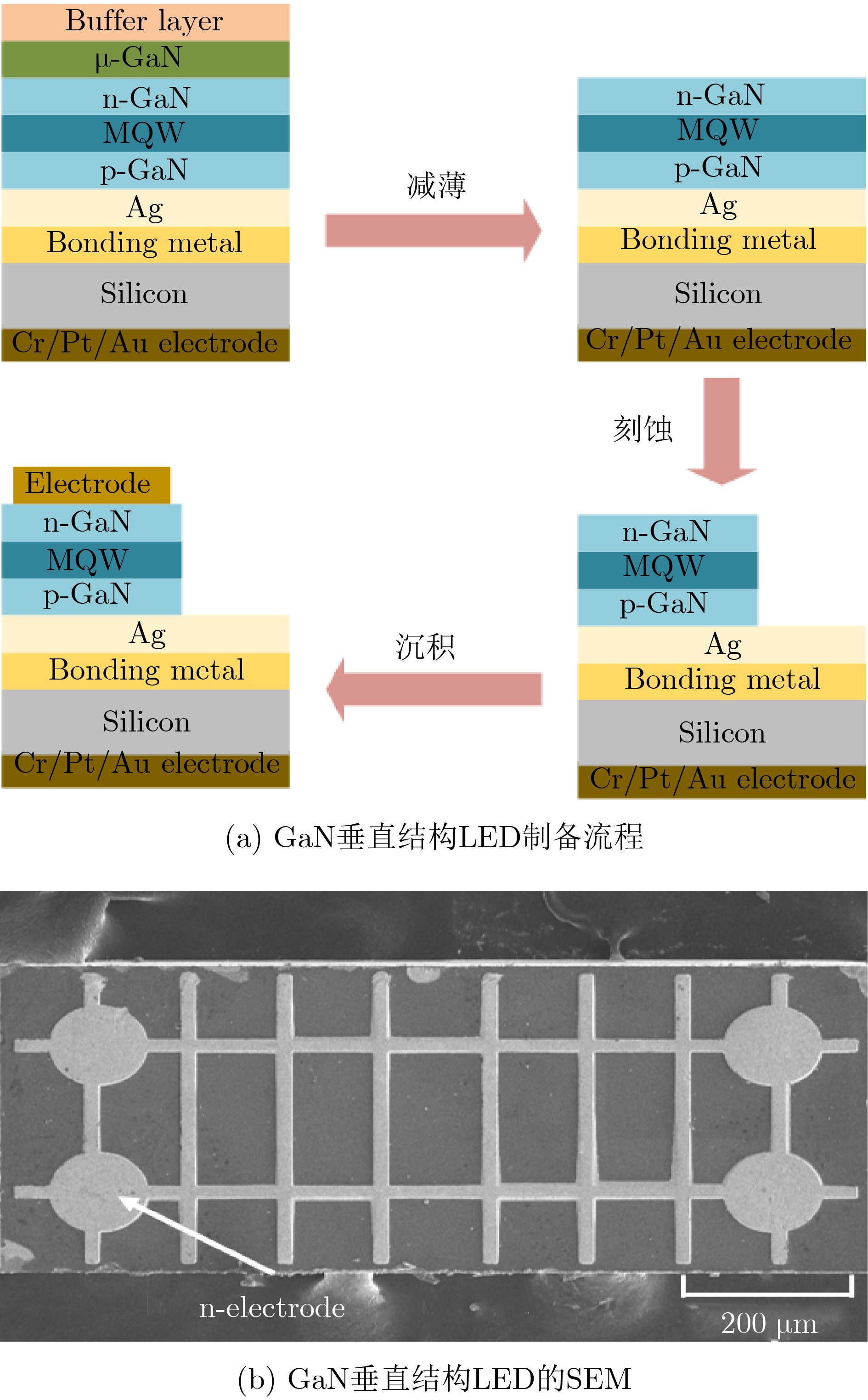
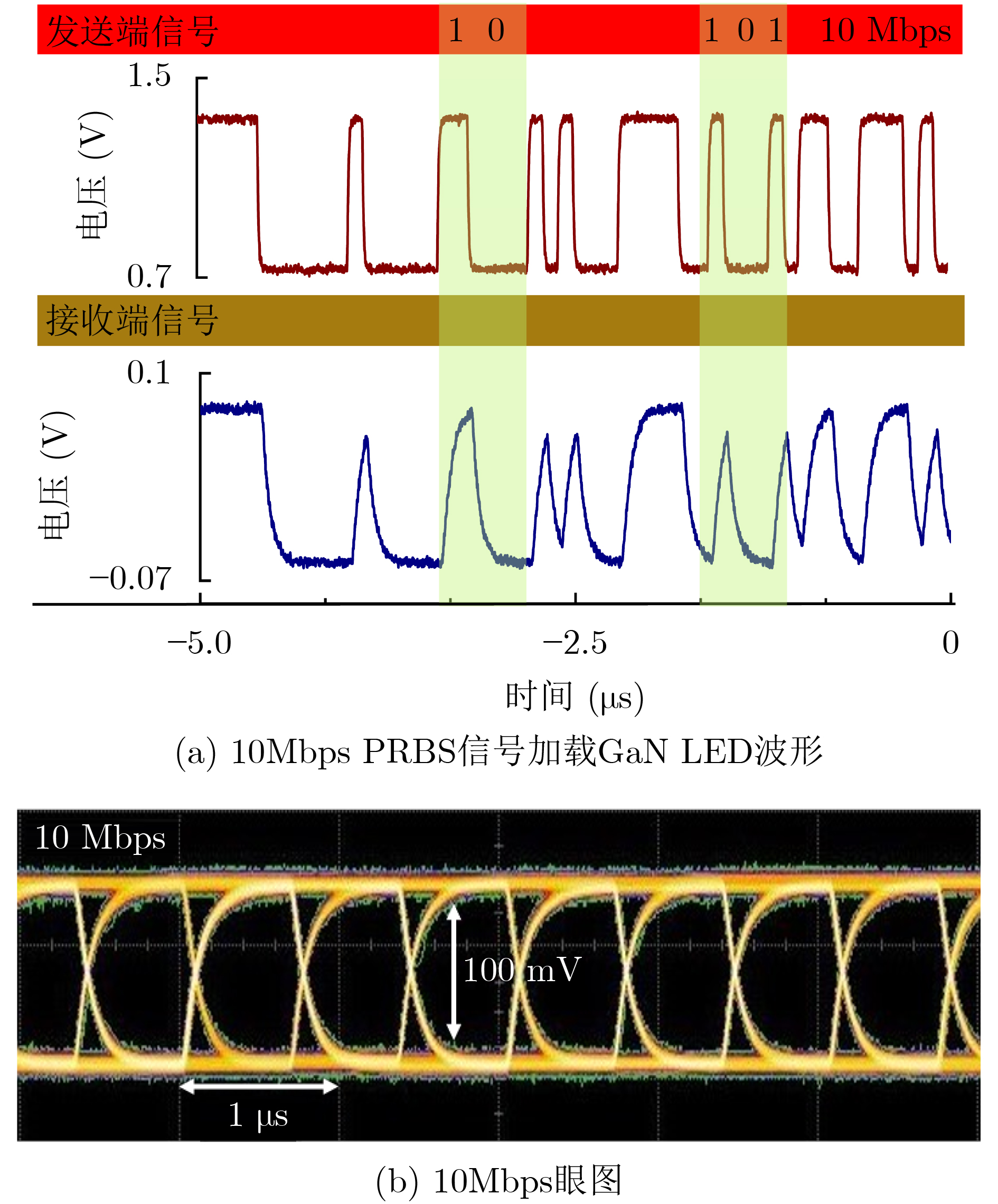
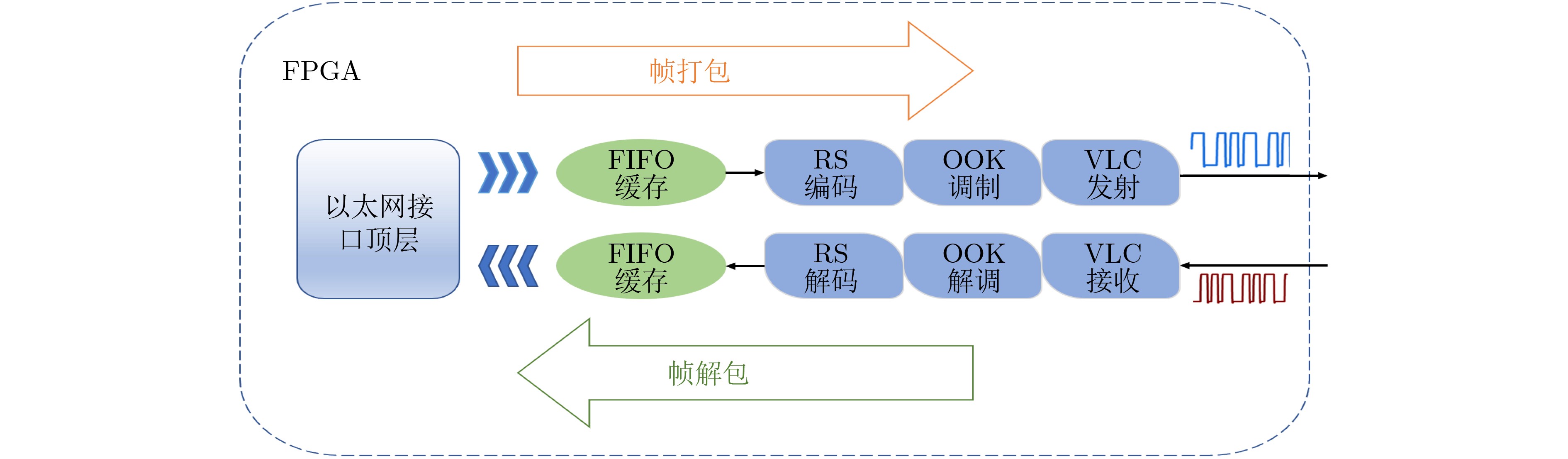
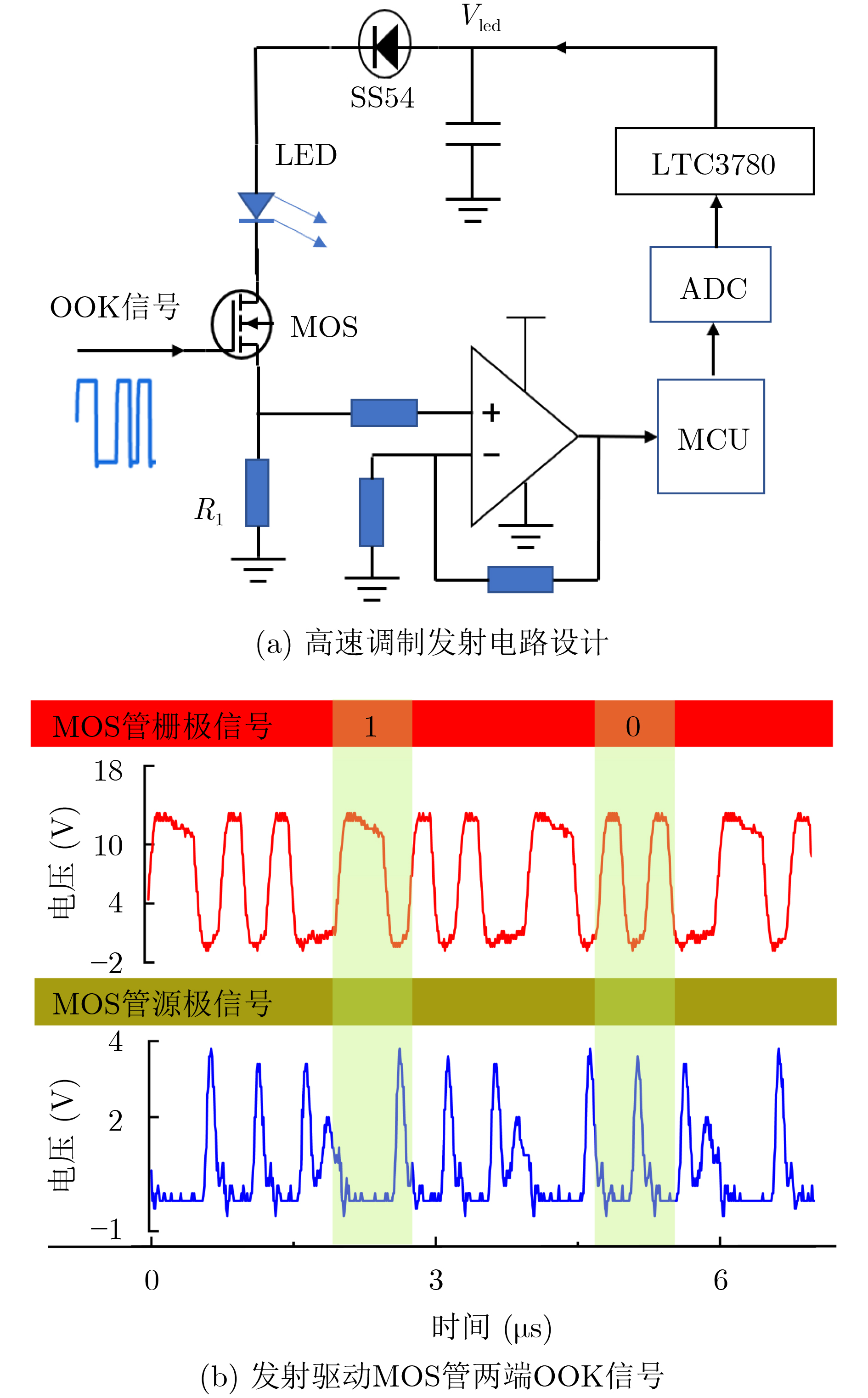
摘要: 垂直结构GaN LED能够提高器件的出光效率和调制带宽,是可见光通信的关键器件。该文面向水下蓝光通信的重大应用需求,基于亚波长理想LED模型,设计、制备了垂直结构蓝光LED器件,在NRZ-OOK调制下可实现10 Mbps的无线光通信。该文进一步搭建了水下可见光通信系统,采用基于该器件,实现了调制速率2 Mbps的全双工水下蓝光通信。Abstract: Ultrathin vertical-structure GaN Light Emitting Diode (LED) that can enhance light extraction efficiency as well as modulation bandwidth is a key optical element for visible light communication. In order to meet the requirement of underwater blue light communication, vertical-structure blue LED is designed and fabricated according to subwavelength vertical structure LED model. The fabricated vertical-structure LED can achieve a transmission rate of 10 Mbps under the NRZ-OOK modulation scheme. Furthermore,this vertical-structure LED is used to establish an underwater blue light communication system, which can achieve a full-duplex data communication with a modulation rate of 2 Mbps.
-
[1] TIAN Pengfei, LIU Xiaoyan, YI Suyu, et al. High-speed underwater optical wireless communication using a blue GaN-based micro-LED[J]. Optics Express, 2017, 25(2): 1193–1201. doi: 10.1364/OE.25.001193 [2] LU Zhijian, TIAN Pengfei, CHEN Hong, et al. Active tracking system for visible light communication using a GaN-based micro-LED and NRZ-OOK[J]. Optics Express, 2017, 25(15): 17971–17981. doi: 10.1364/OE.25.017971 [3] ZOU Peng, ZHAO Yiheng, HU Fangchen, et al. Underwater visible light communication at 3.24 Gb/s using novel two-dimensional bit allocation[J]. Optics Express, 2020, 28(8): 11319–11338. doi: 10.1364/OE.390718 [4] SHEN Chao, GUO Yujian, OUBEI H M, et al. 20-meter underwater wireless optical communication link with 1.5 Gbps data rate[J]. Optics Express, 2016, 24(22): 25502–25509. doi: 10.1364/OE.24.025502 [5] LIU Xiaoyan, YI Suyu, ZHOU Xiaolin, et al. 34.5 m underwater optical wireless communication with 2.70 Gbps data rate based on a green laser diode with NRZ-OOK modulation[J]. Optics Express, 2017, 25(22): 27937–27947. doi: 10.1364/OE.25.027937 [6] 王金龙, 高进, 吴振刚, 等. 基于商用蓝光LED的深海高速无线光通信系统[J]. 光通信技术, 2021, 45(11): 41–44. doi: 10.13921/j.cnki.issn1002-5561.2021.11.008WANG Jinlong, GAO Jin, WU Zhengang, et al. Deep sea high-speed wireless optical communication system based on commercial blue LED[J]. Optical Communication Technology, 2021, 45(11): 41–44. doi: 10.13921/j.cnki.issn1002-5561.2021.11.008 [7] KANG C H, TRICHILI A, ALKHAZRAGI O, et al. Ultraviolet-to-blue color-converting scintillating-fibers photoreceiver for 375-nm laser-based underwater wireless optical communication[J]. Optics Express, 2019, 27(21): 30450–30461. doi: 10.1364/OE.27.030450 [8] KAUSHAL H and KADDOUM G. Underwater optical wireless communication[J]. IEEE Access, 2016, 4: 1518–1547. doi: 10.1109/ACCESS.2016.2552538 [9] 李丽. 基于蓝光LED的便携式水下视频通信系统[D]. [硕士论文], 南京邮电大学, 2014.LI Li. Underwater portable video communication system based on blue light LED[D]. [Master dissertation], Nanjing University of Posts and Telecommunications, 2014. [10] HANSON F and RADIC S. High bandwidth underwater optical communication[J]. Applied Optics, 2008, 47(2): 277–283. doi: 10.1364/AO.47.000277 [11] WANG Jiemei, LU Chunhui, LI Shangbin, et al. 100 m/500 Mbps underwater optical wireless communication using an NRZ-OOK modulated 520 nm laser diode[J]. Optics Express, 2019, 27(9): 12171–12181. doi: 10.1364/OE.27.012171 [12] 迟楠, 王超凡, 李韦萍, 等. 基于蓝绿光LED的水下可见光通信技术研究进展[J]. 复旦学报:自然科学版, 2019, 58(5): 537–548. doi: 10.15943/j.cnki.fdxb-jns.2019.05.001CHI Nan, WANG Chaofan, LI Weiping, et al. Research progress of underwater visible light communication technology based on blue-green LED[J]. Journal of Fudan University:Natural Science, 2019, 58(5): 537–548. doi: 10.15943/j.cnki.fdxb-jns.2019.05.001 [13] KONG Meiwei, CHEN Yifei, SARWAR R, et al. Underwater wireless optical communication using an arrayed transmitter/receiver and optical superimposition-based PAM-4 signal[J]. Optics Express, 2018, 26(3): 3087–3097. doi: 10.1364/OE.26.003087 [14] CHI Nan, ZHAO Yiheng, SHI Meng, et al. Gaussian kernel-aided deep neural network equalizer utilized in underwater PAM8 visible light communication system[J]. Optics Express, 2018, 26(20): 26700–26712. doi: 10.1364/OE.26.026700 [15] SHEN Jiannan, WANG Jiongliang, YU Chuying, et al. Single LED-based 46-m underwater wireless optical communication enabled by a multi-pixel photon counter with digital output[J]. Optics Communications, 2019, 438: 78–82. doi: 10.1016/j.optcom.2019.01.031 [16] LI Jinjia, YE Demao, FU Kang, et al. Single-photon detection for MIMO underwater wireless optical communication enabled by arrayed LEDs and SiPMs[J]. Optics Express, 2021, 29(16): 25922–25944. doi: 10.1364/OE.433798 [17] WANG Yongjin, WU Fan, WANG Xin, et al. GaN photonics: Simultaneous emission-detection phenomenon of multiple quantum well diode[J]. SPIE, 2018, 10823. [18] LI Zengcheng, LIU Legong, HUANG Yingnan, et al. High-power AlGaN-based near-ultraviolet light-emitting diodes grown on Si(111)[J]. Applied Physics Express, 2017, 10(7): 072101. doi: 10.7567/APEX.10.072101 [19] 蒋成伟, 沙源清, 袁佳磊, 等. 电致发光的完全悬空超薄硅衬底氮化镓基蓝光LED器件的制备与表征[J]. 中国光学, 2021, 14(1): 153–162. doi: 10.37188/CO.2020-0148JIANG Chengwei, SHA Yuanqing, YUAN Jialei, et al. Fabrication and characterization of an LED based on a GaN-on-silicon platform with an ultra-thin freestanding membrane in the blue range[J]. Chinese Optics, 2021, 14(1): 153–162. doi: 10.37188/CO.2020-0148 [20] WANG Yongjin, NI Shuyu, WANG Shuai, et al. A 225-nm-thick vertical-structure light-emitting diode inhibiting confined waveguide mode[J]. Applied Physics Express, 2019, 12(4): 046503. doi: 10.7567/1882-0786/ab0664 [21] 金瑞雪. 面向可见光通信的GaN垂直结构光电器件研究[D]. [硕士论文], 南京邮电大学, 2021.JIN Ruixue. Research on GaN vertical structure optoelectronic devices for visible light communication[D]. [Master dissertation], Nanjing University of Posts and Telecommunications, 2021. [22] 王永进, 章燕, 高绪敏, 等. 亚波长理想LED模型及实验实现[J]. 南京邮电大学学报: 自然科学版, 2019, 39(2): 1–5. doi: 10.14132/j.cnki.1673-5439.2019.02.001WANG Yongjin, ZHANG Yan, GAO Xumin, et al. Subwavelength perfect LED architecture and experimental realization[J]. Journal of Nanjing University of Posts and Telecommunications:Natural Science Edition, 2019, 39(2): 1–5. doi: 10.14132/j.cnki.1673-5439.2019.02.001 -

 下载:
下载:




图(7) / 表(1)
计量
- 文章访问数: 1554
- HTML全文浏览量: 1468
- PDF下载量: 103
- 被引次数: 0
