

Two-dimensional Deployment Optimization Method for the Barrier Coverage of Bistatic Radars
-
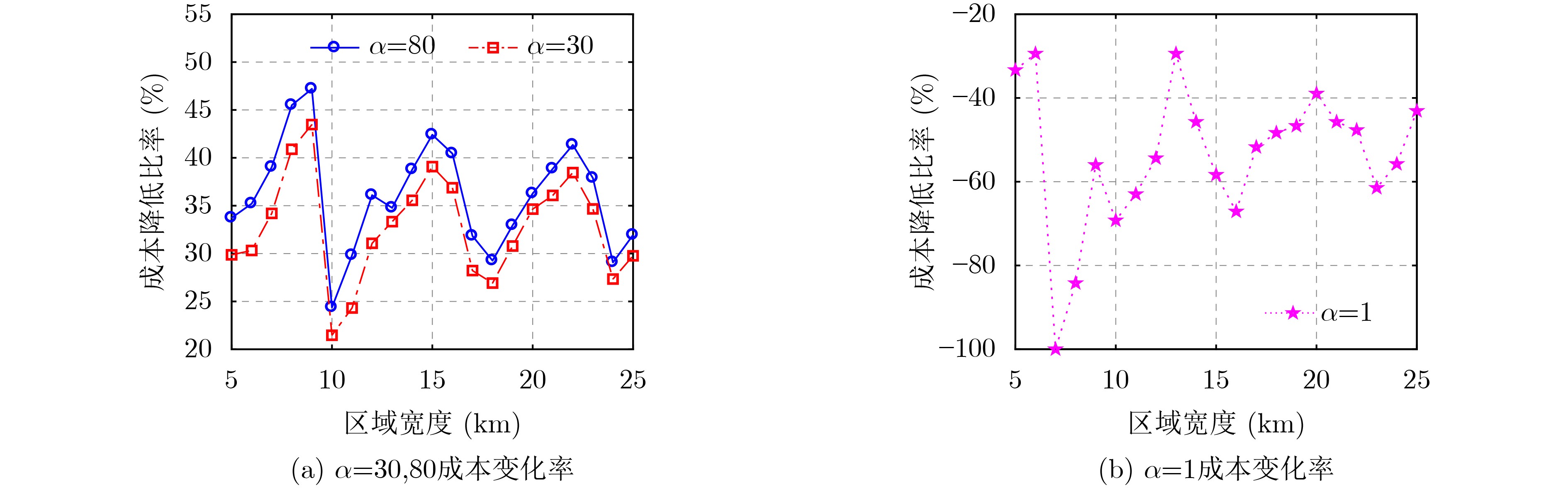
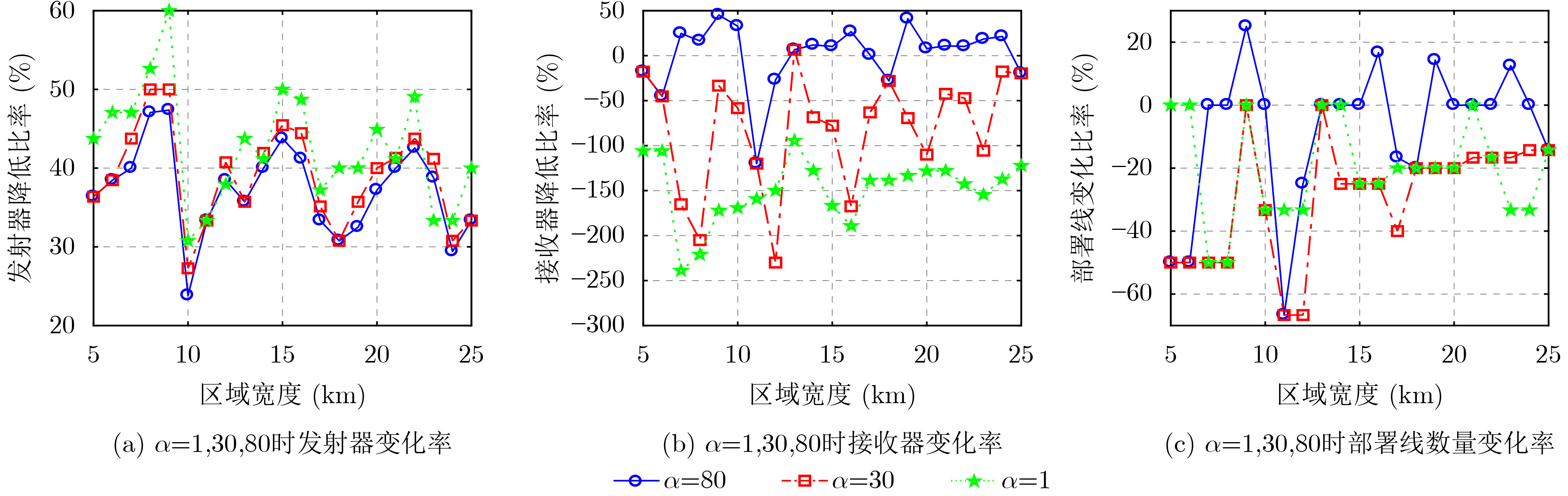
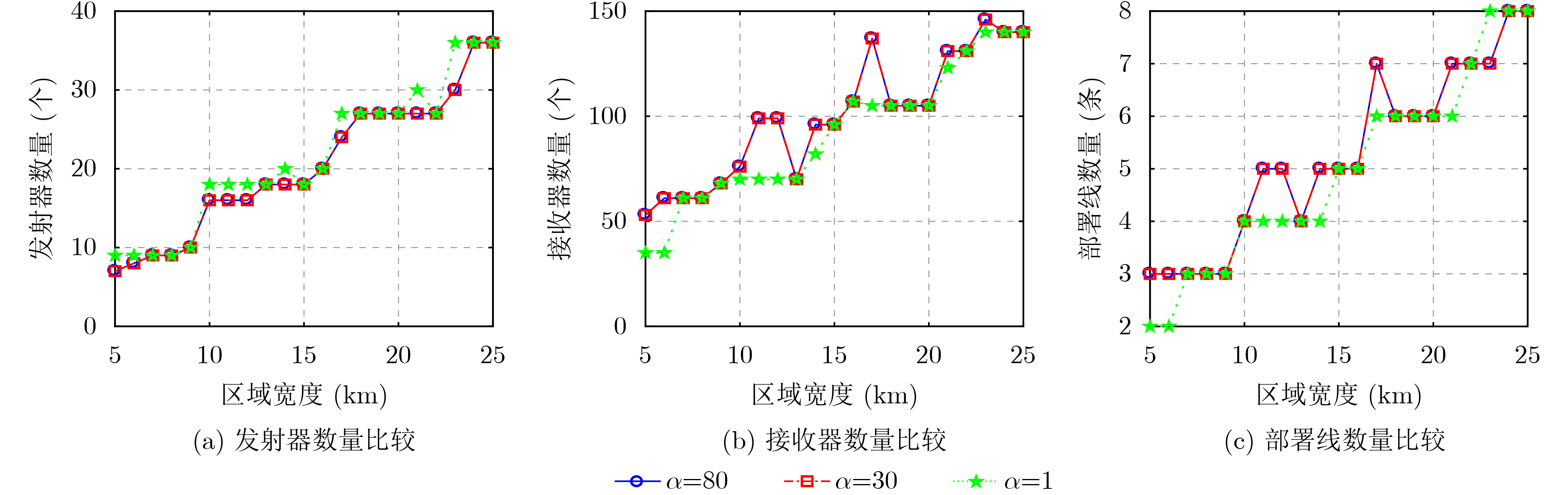
摘要: 为解决双基地雷达栅栏覆盖的优化问题,该文提出一种基于相邻部署线的2维布站优化方法。该方法首先将感兴趣区域用矩形区域近似替代,再将矩形区域划分为多个相同的子栅栏覆盖区域;其次为了充分发挥发射器的效能,该方法不仅利用同条部署线上的发射器与接收器组成双基地雷达,同时也采用相邻部署线之间的发射器与接收器组成双基地雷达。为此提出一种新的基本布站模式,并以该模式为基础建立2维布站的优化模型。该模型以布站成本最小为准则,覆盖区域为约束条件。为了求解该优化模型,该文提出一种基于贪婪算法的求解方法,该方法可以确定2维布站中发射器与接收器的数量及其位置。最后,仿真试验和分析表明该文方法可以有效降低布站成本,减少发射器的使用数量,证明了该文布站优化方法的有效性。Abstract: To solve the optimization problem of bistatic radar for belt barrier coverage, a two-dimensional deployment optimization method using adjacent deployment lines is proposed. First, the field of interest is approximately represented by a rectangular area, and then the area is divided into multiple identical sub-barrier coverage areas. To give full play to the efficiency of the transmitters, the bistatic radars consisting of the transmitters and the receivers on the same deployment line and the adjacent deployment lines should be considered. Thus, four two-dimensional deployment patterns are introduced and analyzed. Furthermore, an optimization model based on these deployment patterns is proposed. The minimum deployment cost and the coverage area requirements are adopted as the optimization criterion and constraints, respectively. A method based on the greedy algorithm is exploited to solve the optimization model. The deployment locations and the minimum deployment cost can be calculated by the proposed method. Finally, the simulation results and analysis show that, compared with the existing method, the minimum deployment cost and the number of transmitters can be impressively reduced by the proposed method. The effectiveness of the proposed method is proven.
-
[1] MISHRA T K, SADHU J, and KUMAR A. Boundary detection in dynamic wireless sensor networks using convex hull techniques[C]. 2020 IEEE Calcutta Conference (CALCON), Kolkata, India, 2020: 368–372. [2] WANG Changqing, WANG Bang, and LIU Wenyu. Movement strategies for improving barrier coverage in wireless sensor networks: A survey[C]. The 13th International Conference on Communication Technology, Jinan, China, 2011: 938–943. [3] MA Zijing, LI Shuangjuan, and HUANG Dong. Exact algorithms for barrier coverage with line-based deployed rotatable directional sensors[C]. 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Korea (South), 2020: 1–7. [4] LI Haipeng, FENG Dazheng, CHEN Shaofeng, et al. Deployment optimization method of multistatic radar for constructing circular barrier coverage[J]. Sensors, 2021, 21(19): 6573. doi: 10.3390/s21196573 [5] COLONE F, MARTELLI T, and LOMBARDO P. Quasi-monostatic versus near forward scatter geometry in WiFi-based passive radar sensors[J]. IEEE Sensors Journal, 2017, 17(15): 4757–4772. doi: 10.1109/JSEN.2017.2713450 [6] 胡勤振, 杨建宇, 吴良斌, 等. 基于距离-多普勒补偿的多基雷达协同抗主瓣压制干扰[J]. 电子与信息学报, 2021, 43(3): 516–522. doi: 10.11999/JEIT200229HU Qinzhen, YANG Jianyu, WU Liangbin, et al. Main-lobe suppression jamming cancellation for multistatic radar based on range-Doppler bias offsetting[J]. Journal of Electronics &Information Technology, 2021, 43(3): 516–522. doi: 10.11999/JEIT200229 [7] 孙闽红, 丁辰伟, 张树奇, 等. 基于统计相关差异的多基地雷达拖引欺骗干扰识别[J]. 电子与信息学报, 2020, 42(12): 2992–2998. doi: 10.11999/JEIT190634SUN Minhong, DING Chenwei, ZHANG Shuqi, et al. Recognition of deception jamming based on statistical correlation difference in a multistatic radar system[J]. Journal of Electronics &Information Technology, 2020, 42(12): 2992–2998. doi: 10.11999/JEIT190634 [8] YU Hengli, LIU Nan, ZHANG Linrang, et al. An interference suppression method for multistatic radar based on noise subspace projection[J]. IEEE Sensors Journal, 2020, 20(15): 8797–8805. doi: 10.1109/JSEN.2020.2984389 [9] 何缓, 柯亨玉, 万显荣, 等. 双基地高频地波雷达系统布站研究[J]. 电子与信息学报, 2012, 34(2): 333–337. doi: 10.3724/SP.J.1146.2011.00708HE Huan, KE Hengyu, WAN Xianrong, et al. Study on the distribution of bistatic high-frequency ground wave radar system[J]. Journal of Electronics &Information Technology, 2012, 34(2): 333–337. doi: 10.3724/SP.J.1146.2011.00708 [10] SI Pengju, WANG Shuaishuai, SHU Lei, et al. Optimal deployment for target-barrier coverage problems in wireless sensor networks[J]. IEEE Systems Journal, 2021, 15(2): 2241–2244. doi: 10.1109/JSYST.2020.2990395 [11] XU Xianghua, ZHAO Chengwei, YE Tingcong, et al. Minimum cost deployment of bistatic radar sensor for perimeter barrier coverage[J]. Sensors, 2019, 19(2): 225. doi: 10.3390/s19020225 [12] CHEN Jiaoyan, WANG Bang, and LIU Wenyu. Constructing perimeter barrier coverage with bistatic radar sensors[J]. Journal of Network and Computer Applications, 2015, 57: 129–141. doi: 10.1016/j.jnca.2015.07.015 [13] 李海鹏, 冯大政, 周永伟, 等. 收发分置雷达圆周栅栏覆盖的优化布站方法[J]. 系统工程与电子技术, 2022, 44(3): 786–794. doi: 10.12305/j.issn.1001-506X.2022.03.10LI Haipeng, FENG Dazheng, ZHOU Yongwei, et al. Optimal placement method for bistatic radar on perimeter barrier coverage[J]. Systems Engineering and Electronics, 2022, 44(3): 786–794. doi: 10.12305/j.issn.1001-506X.2022.03.10 [14] WANG Bang, CHEN Jiaoyan, LIU Wenyu, et al. Minimum cost placement of bistatic radar sensors for belt barrier coverage[J]. IEEE Transactions on Computers, 2016, 65(2): 577–588. doi: 10.1109/TC.2015.2423679 [15] 李海鹏, 冯大政, 周永伟, 等. 多基地雷达组网布站优化方法[J]. 兵工学报, 2021, 42(3): 563–571. doi: 10.3969/j.issn.1000-1093.2021.03.012LI Haipeng, FENG Dazheng, ZHOU Yongwei, et al. Optimization approach of the deployment network for multistatic radar[J]. Acta Armamentarii, 2021, 42(3): 563–571. doi: 10.3969/j.issn.1000-1093.2021.03.012 [16] 李海鹏, 冯大政. 多基地雷达传感器栅栏覆盖矩形区域的优化方法[J]. 系统工程与电子技术, 2020, 42(10): 2207–2213. doi: 10.3969/j.issn.1001-506X.2020.10.08LI Haipeng and FENG Dazheng. Optimal method of multistatic radar sensors for barrier coverage on rectangular zone[J]. Systems Engineering and Electronics, 2020, 42(10): 2207–2213. doi: 10.3969/j.issn.1001-506X.2020.10.08 [17] LI Haipeng, FENG Dazheng, LIU Chao, et al. Optimal deployment of multistatic radar for belt barrier coverage[J]. Wireless Networks, 2022, 28(5): 2213–2235. doi: 10.1007/s11276-022-02939-5 [18] CHANG H Y, KAO L, CHANG K P, et al. Fault-tolerance and minimum cost placement of bistatic radar sensors for belt barrier coverage[C]. 2016 International Conference on Network and Information Systems for Computers, Wuhan, China, 2016: 1–7. [19] 陈伯孝. 现代雷达系统分析与设计[M]. 西安: 西安电子科技大学出版社, 2012.CHEN Boxiao. Mordern Radar System Analysis and Design[M]. Xi’an: Xidian University Press, 2012. [20] LIANG Jing and LIANG Qilian. Orthogonal waveform design and performance analysis in radar sensor networks[C]. The MILCOM 2006 - 2006 IEEE Military Communications Conference, Washington, USA, 2006: 1–6. [21] BROOKNER E. Adaptive antennas, concepts and performance[J]. IEEE Antennas and Propagation Society Newsletter, 1988, 30(5): 37. doi: 10.1109/MAP.1988.6086113 [22] 陈多芳, 陈伯孝, 刘春波, 等. 基于子空间投影的双基地地波超视距雷达直达波抑制方法[J]. 电子与信息学报, 2008, 30(11): 2702–2705. doi: 10.3724/SP.J.1146.2007.00639CHEN Duofang, CHEN Boxiao, LIU Chunbo, et al. Subspace-projection based direct-path-interference suppression in bistatic GWOTHR[J]. Journal of Electronics &Information Technology, 2008, 30(11): 2702–2705. doi: 10.3724/SP.J.1146.2007.00639 [23] 宋杰, 何友, 关键. 非合作双基地雷达测距方法与精度分析[J]. 电子科技大学学报, 2009, 38(2): 169–172,221. doi: 10.3969/j.issn.1001-0548.2009.02.03SONG Jie, HE You, and GUAN Jian. Distance measuring method and accuracy analysis in non-cooperative bistatic radar[J]. Journal of University of Electronic Science and Technology of China, 2009, 38(2): 169–172,221. doi: 10.3969/j.issn.1001-0548.2009.02.03 [24] 赖世雄. 双/多基地高频地波雷达目标定位及配对算法研究[D]. [硕士论文], 哈尔滨工业大学, 2008.LAI Shixiong. Study of target location and matching algorithm for bistatic high frequency surface wave radar[D]. [Master dissertation], Harbin Institute of Technology, 2008. [25] 李海鹏, 冯大政, 周永伟. 多基地雷达栅栏覆盖的优化布站方法[J]. 西安电子科技大学学报, 2021, 48(2): 147–155,172. doi: 10.19665/j.issn1001-2400.2021.02.019LI Haipeng, FENG Dazheng, and ZHOU Yongwei. Optimum placement method of multistatic radar barrier coverage[J]. Journal of Xidian University, 2021, 48(2): 147–155,172. doi: 10.19665/j.issn1001-2400.2021.02.019 -

 下载:
下载:





图(7)
计量
- 文章访问数: 955
- HTML全文浏览量: 629
- PDF下载量: 76
- 被引次数: 0
