

Intelligent Vehicle Localization Based on Polarized LiDAR Representation and Siamese Network
-
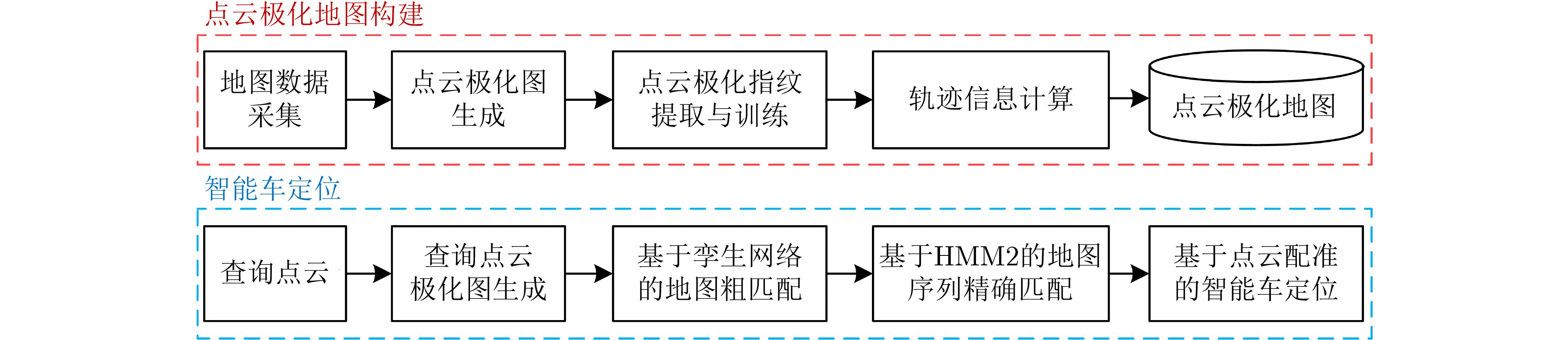
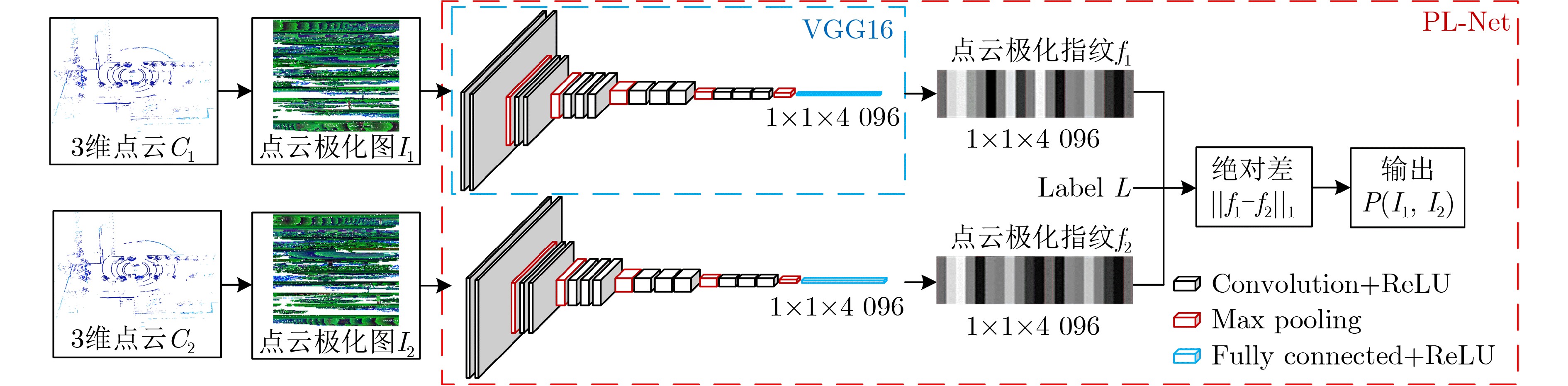
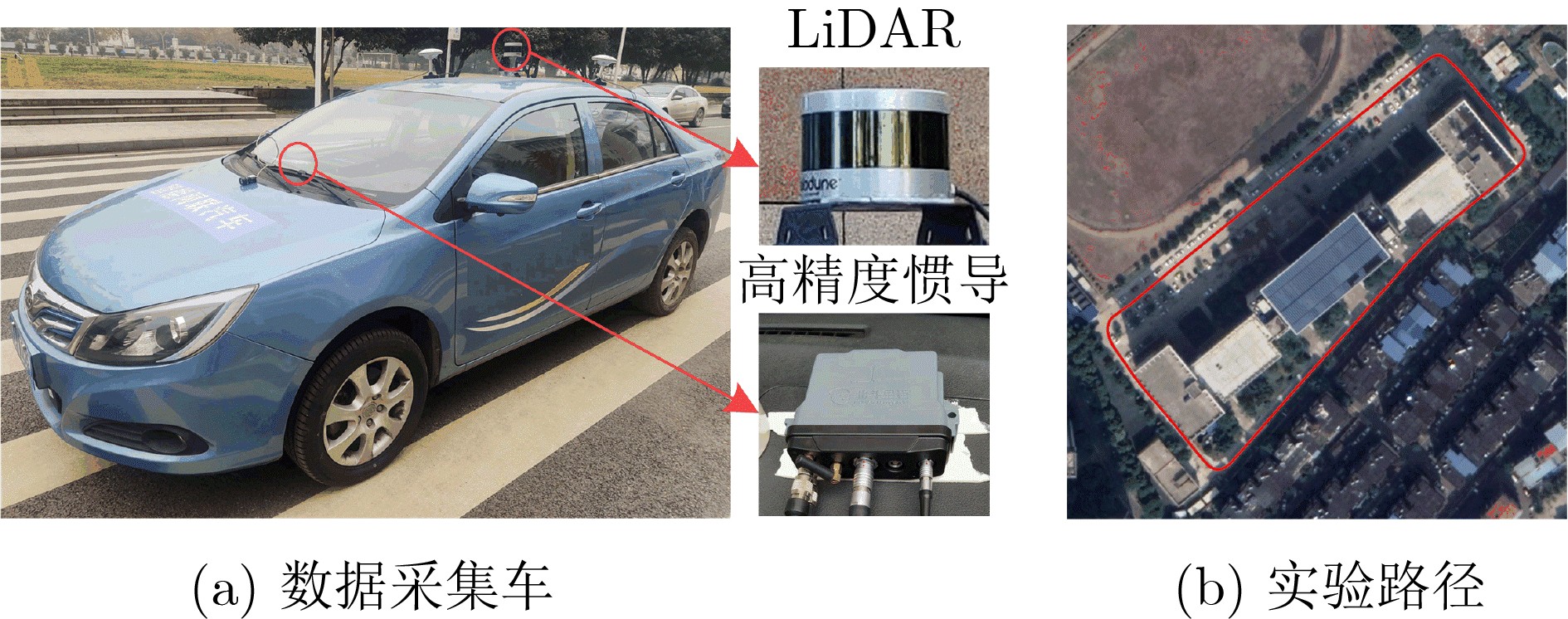
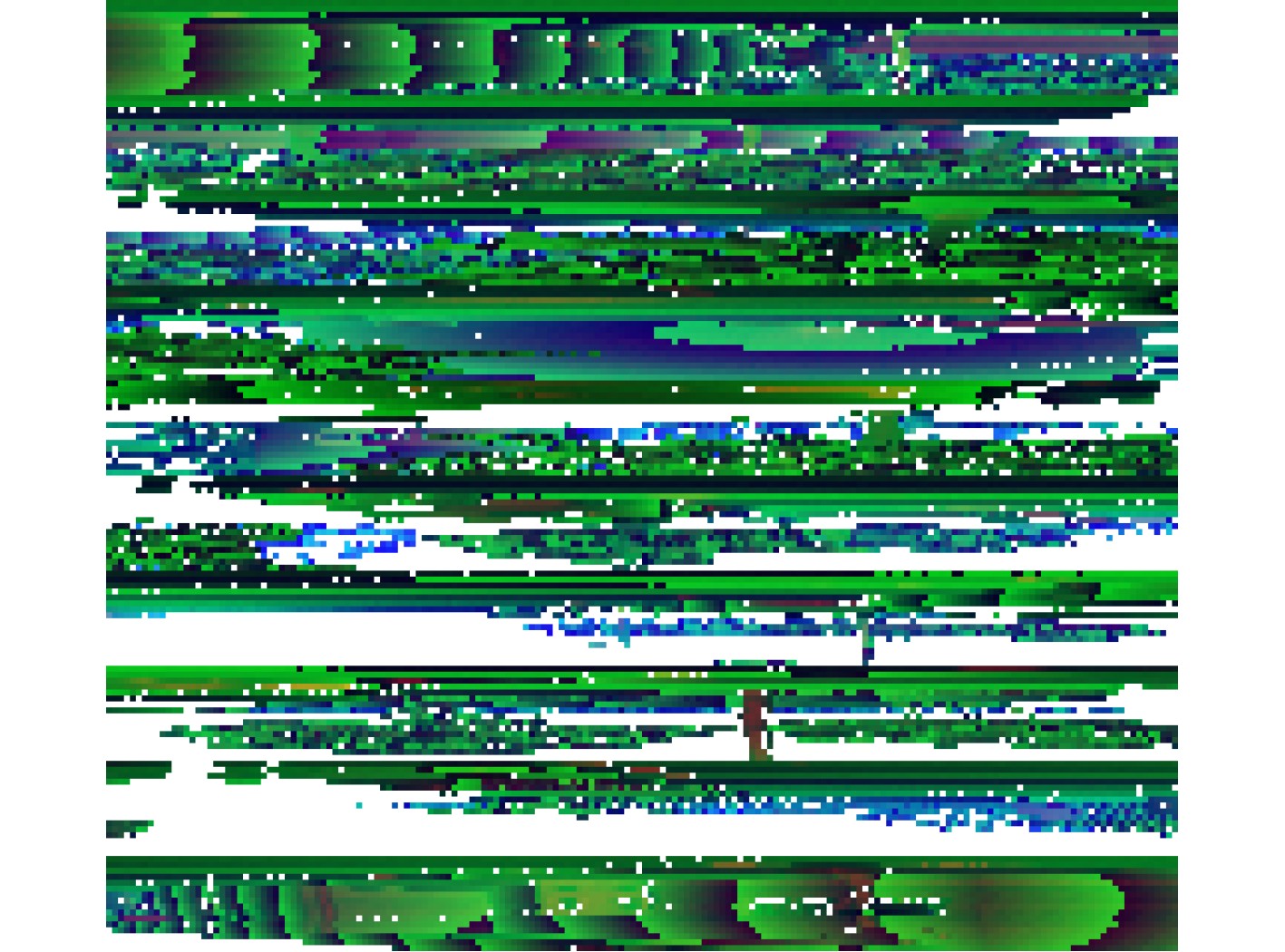
摘要: 基于3维激光雷达 (LiDAR) 的智能车定位在地图存储空间与匹配效率、准确率等方面仍存在诸多问题。该文提出一种轻量级点云极化地图构建方法:采用多通道图像模型对3维点云进行编码生成点云极化图,利用孪生网络结构提取并训练点云极化指纹,结合轨迹位姿信息构建点云极化地图。还提出一种基于点云极化地图匹配的智能车定位方法:采用孪生网络对查询指纹与地图指纹进行相似度建模实现快速的地图粗匹配,采用基于2阶隐马尔可夫模型 (HMM2) 的地图序列精确匹配方法获取最近的地图节点,通过点云配准计算车辆位姿。使用实地数据集和公开的KITTI数据集进行测试。实验结果表明,地图匹配准确率高于96%,定位平均误差约为30 cm,并对不同类型的LiDAR传感器与不同的场景具有较好的鲁棒性。Abstract: Intelligent vehicle localization based on 3D Light Detection And Ranging (LiDAR) is still a challenging task in map storage and the efficiency and accuracy of map matching. A lightweight node-level polarized LiDAR map is constructed by a series of nodes with a 2D polarized LiDAR image, a polarized LiDAR fingerprint, and sensor pose, while the polarized LiDAR image encodes a 3D cloud using a multi-channel image format, and the fingerprint is extracted and trained using Siamese network. An intelligent vehicle localization method is also proposed by matching with the polarized LiDAR map. Firstly, Siamese network is used to model the similarity of the query and map fingerprints for fast and coarse map matching. Then a Second-Order Hidden Markov Model (HMM2)-based map sequence matching method is used to find the nearest map node. Finally, the vehicle is readily localized using 3D registration. The proposed method is tested using the actual field data and the public KITTI database. The results indicate that the proposed method can achieve map matching accuracy up to 96% and 30cm localization accuracy with robustness in different types of LiDAR sensors and different environments.
-
表 1 基于孪生网络的点云极化地图粗匹配结果
$ \Delta m $ (m) $\mu $内地图节点的
平均数目 (个)粗匹配结果的
平均数目 (个)${\overline P _f}$ (%) 1.0 10.0 3.0 95.42 1.5 6.7 2.9 96.39 2.0 5.0 3.1 95.70  下载: 导出CSV
下载: 导出CSV
表 3 改变
$ {\sigma _s} $ 和$ {\sigma _e} $ 获取地图序列精确匹配结果Pa (%)$ {\sigma _s} $ $ {\sigma _e} $ 0.5 1.0 1.5 2.0 2.5 0.8 97.99 97.99 98.57 98.28 97.99 1.0 97.99 97.99 98.85 97.71 97.13 1.2 97.71 97.99 98.28 96.85 96.28
下载: 导出CSV
表 4 改变地图分辨率和车速获取地图序列精确匹配结果Pa (%)
$v$ (m/s) $ \Delta m $ (m) 1.5 2.0 5 96.22 98.46 10 95.04 98.09 15 97.99 98.85
下载: 导出CSV
-
[1] XIAO Zhu, CHEN Yanxun, ALAZAB M, et al. Trajectory data acquisition via private car positioning based on tightly-coupled GPS/OBD integration in urban environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(7): 9680–9691. doi: 10.1109/TITS.2021.3105550 [2] 中国科学技术协会. 中国科协发布2020重大科学问题和工程技术难题[EB/OL]. https://www.cast.org.cn/art/2020/8/16/art_90_130822.html, 2020. [3] GUO Xiansheng, ANSARI N, HU Fangzi, et al. A survey on fusion-based indoor positioning[J]. IEEE Communications Surveys & Tutorials, 2020, 22(1): 566–594. doi: 10.1109/COMST.2019.2951036 [4] 刘国忠, 胡钊政. 基于SURF和ORB全局特征的快速闭环检测[J]. 机器人, 2017, 39(1): 36–45. doi: 10.13973/j.cnki.robot.2017.0036LIU Guozhong and HU Zhaozheng. Fast loop closure detection based on holistic features from SURF and ORB[J]. Robot, 2017, 39(1): 36–45. doi: 10.13973/j.cnki.robot.2017.0036 [5] 李祎承, 胡钊政, 王相龙, 等. 面向智能车定位的道路环境视觉地图构建[J]. 中国公路学报, 2018, 31(11): 138–146,213. doi: 10.3969/j.issn.1001-7372.2018.11.015LI Yicheng, HU Zhaozheng, WANG Xianglong, et al. Construction of a visual map based on road scenarios for intelligent vehicle localization[J]. China Journal of Highway and Transport, 2018, 31(11): 138–146,213. doi: 10.3969/j.issn.1001-7372.2018.11.015 [6] 姚萌, 贾克斌, 萧允治. 基于单目视频和无监督学习的轻轨定位方法[J]. 电子与信息学报, 2018, 40(9): 2127–2134. doi: 10.11999/JEIT171017YAO Meng, JIA Kebin, and SIU Wanchi. Learning-based localization with monocular camera for light-rail system[J]. Journal of Electronics &Information Technology, 2018, 40(9): 2127–2134. doi: 10.11999/JEIT171017 [7] SHAN Tixiao and ENGLOT B. LeGO-LOAM: Lightweight and ground-optimized LiDAR odometry and mapping on variable terrain[C]. Proceedings of 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018: 4758–4765. [8] KOIDE K, MIURA J, and MENEGATTI E. A portable three-dimensional LiDAR-based system for long-term and wide-area people behavior measurement[J]. International Journal of Advanced Robotic Systems, 2019, 16(2): 72988141984153. doi: 10.1177/1729881419841532 [9] WAN Guowei, YANG Xiaolong, CAI Renlan, et al. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes[C]. Proceedings of 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 2018: 4670–4677. [10] 胡钊政, 刘佳蕙, 黄刚, 等. 融合WiFi、激光雷达与地图的机器人室内定位[J]. 电子与信息学报, 2021, 43(8): 2308–2316. doi: 10.11999/JEIT200671HU Zhaozheng, LIU Jiahui, HUANG Gang, et al. Integration of WiFi, laser, and map for robot indoor localization[J]. Journal of Electronics &Information Technology, 2021, 43(8): 2308–2316. doi: 10.11999/JEIT200671 [11] YIN Huan, WANG Yue, DING Xiaqing, et al. 3D LiDAR-based global localization using Siamese neural network[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(4): 1380–1392. doi: 10.1109/TITS.2019.2905046 [12] KIM G, CHOI S, and KIM A. Scan context++: Structural place recognition robust to rotation and lateral variations in urban environments[J]. IEEE Transactions on Robotics, 2022, 38(3): 1856–1874. doi: 10.1109/TRO.2021.3116424 [13] CHEN Xieyuanli, LÄBE T, MILIOTO A, et al. OverlapNet: A siamese network for computing LiDAR scan similarity with applications to loop closing and localization[J]. Autonomous Robots, 2022, 46(1): 61–81. doi: 10.1007/s10514-021-09999-0 [14] BROMLEY J, GUYON I, LECUN Y, et al. Signature verification using a “Siamese” time delay neural network[C]. Proceedings of the 6th International Conference on Neural Information Processing Systems (NIPS), Denver, USA, 1993: 737–744. [15] BAY H, ESS A, TUYTELAARS T, et al. Speeded–up robust features (SURF)[J]. Computer Vision and Image Understanding, 2008, 110(3): 346–359. doi: 10.1016/j.cviu.2007.09.014 [16] FISCHLER M A and BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381–395. doi: 10.1145/358669.358692 [17] SERVOS J and WASLANDER S L. Multi-channel generalized-ICP: A robust framework for multi-channel scan registration[J]. Robotics and Autonomous Systems, 2017, 87: 247–257. doi: 10.1016/j.robot.2016.10.016 [18] GEIGER A, LENZ P, and URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite[C]. Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, USA, 2012: 3354–3361. -

 下载:
下载:







图(11) / 表(8)
计量
- 文章访问数: 1183
- HTML全文浏览量: 601
- PDF下载量: 108
- 被引次数: 0
