

Weight-Function Notch Filter Algorithm for Narrow-band Interference in eLORAN System
-
摘要: 针对增强型罗兰(eLORAN)系统的带内干扰问题,该文基于陷波滤波器(NF)原理提出一种抗带内窄带干扰的自适应权函数陷波算法(WF-NF)。首先,该文分析讨论了NF算法在eLORAN系统中的适用性及检测频差引起的伪收敛问题;之后通过增加频差权函数,推导出新的WF-NF算法,解决了固有频差导致的陷波逻辑缺陷;随后,提出梯度跳跃收敛优化技术,改进了权系数收敛速度过慢的问题;最后,通过多种环境下的实验验证了算法的稳定性、多元适用性及实用性。分析结果表明,WF-NF算法能够克服检测频差的实际问题,实现高效的干扰跟踪及滤除,同时也可以补偿干扰检测精度,进而为后续的信号处理流程提供保障。Abstract: In order to solve the problem of in-band interference of enhanced LOng RAnge Navigation (eLORAN) system, an adaptive Weight-Function Notch Filter (WF-NF) algorithm is proposed based on the principle of Notch Filter (NF) to resist narrow-band interference. Firstly, the applicability of NF algorithm in eLORAN system and the pseudo convergence caused by detection frequency difference are analyzed. Then, by adding the weight function of frequency difference, a new WF-NF algorithm is derived to solve the notch logic flaw caused by the inherent frequency difference. Next, a gradient-jump optimization technique is designed to improve the convergence speed of weight coefficients. Finally, the stability, multiple applicability and practicability of the new algorithm are verified by simulation experiments in various environments. The analysis results show that the WF-NF algorithm can overcome the practical problem of detection frequency difference, realize efficient interference tracking and filtering, and compensate the accuracy of interference detection, so as to provide guarantee for the subsequent signal processing process.
-
表 1 无噪声环境6个干扰及WF-NF滤波统计(360 ms处)
干扰频率(kHz) 干扰幅度 检测频率(kHz) 频差(Hz) 频差权系数(Hz) 频差误差(Hz) 幅-相权系数 跟踪幅度 幅度误差 97 0.5 97.1 –100 –100.00001887 1.887e-5 0.48757903–0.11075511 0.50000000 <1e-8 106 0.42 105.95 50 50.00004769 4.769e-5 0.40969754–0.09245514 0.42000003 <3e-8 93 1.1 92.808 192 192.00001730 1.730e-5 1.093862170.11604118 1.10000000 <1e-8 112.3 0.73 112.7 –400 –400.00000267 2.67e-6 0.70671391–0.18290832 0.73000000 <1e-8 87.2 0.57 87.232 –32 –31.99998525 1.475e-5 0.569164820.03084474 0.57000000 <1e-8 102.5 1.35 102.435 65 64.99996204 3.796e-5 1.348538100.06280919 1.35000000 <1e-8  下载: 导出CSV
下载: 导出CSV
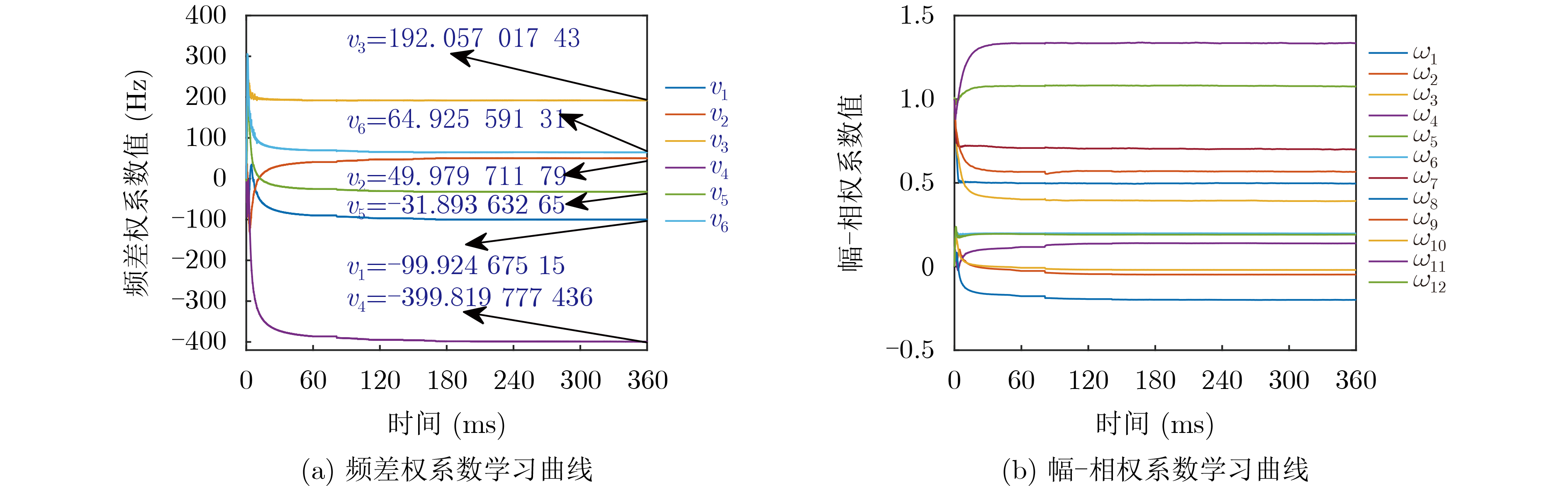
表 2 6个干扰+10 dB白噪声环境WF-NF滤波统计(360 ms处)
干扰频率(kHz) 干扰幅度 检测频率(kHz) 频差(Hz) 频差权系数(Hz) 频差误差(Hz) 幅-相权系数 跟踪幅度 幅度误差 97 0.5 97.1 –100 –99.92467515 0.07532485 0.49562550
–0.047870830.49793197 0.00206803 106 0.42 105.95 50 49.97971179 0.02028821 0.39140512
0.138242630.41510118 0.00489882 93 1.1 92.808 192 192.05701743 0.05701743 1.07620635
0.197662201.09420768 0.00579232 112.3 0.73 112.7 –400 –399.91977736 0.08022264 0.69925836
–0.199050530.72703739 0.00296261 87.2 0.57 87.232 –32 –31.89363265 0.10636735 0.56605044
–0.020301290.56641438 0.00358562 102.5 1.35 102.435 65 64.92559131 0.07440869 1.33417085
0.190344511.34768056 0.00231944
下载: 导出CSV
-
[1] FANG T H, KIM Y, PARK S G, et al. GPS and eLoran integrated navigation for marine applications using augmented measurement equation based on range domain[J]. International Journal of Control, Automation and Systems, 2020, 18(9): 2349–2359. doi: 10.1007/s12555-019-0287-y [2] VAN WILLIGEN D, OFFERMANS G W A, and HELWIG A W S. EUROFIX: Definition and current status[C]. IEEE 1998 Position Location and Navigation Symposium, Palm Springs, USA, 1998: 101–108. [3] 闫温合. eLoran干扰误差模型及抗干扰接收方法研究[D]. [博士论文], 中国科学院大学(国家授时中心), 2021: 2–4.WU Haitao. Study on the independent time service and date communication over Loran-C[D]. [Ph. D. dissertation], University of Chinese Academy of Sciences (National Time Service Center), 2002: 11–23. [4] 熊伟. Loran-C数字信号处理的关键技术研究[D]. [博士论文], 中国科学院研究生院(国家授时中心), 2008: 37–38.XIONG Wei. Study on the crucial techniques of Loran-C digital signal processing[D]. [Ph. D. dissertation], University of Chinese Academy of Sciences (National Time Service Center), 2008: 37–38. [5] 徐永亮, 华宇, 李实锋. BPL接收机中连续波干扰的DSP抑制方法[J]. 仪器仪表学报, 2008, 29(8): 324–327.XU Yongliang, HUA Yu, and LI Shifeng. A method based on DSP to suppress continuous wave interference of BPL receiver[J]. Chinese Journal of Scientific Instrument, 2008, 29(8): 324–327. [6] ŠAFÁŘ J. Analysis, modelling and mitigation of cross-rate interference in enhanced loran[D]. [Ph. D. dissertation], Czech Technical University in Prague, 2014: 54–55. [7] PELGRUM W J. New potential of low-frequency radionavigation in the 21st century[D]. [Ph. D. dissertation], Delft University of Technology, 2006: 77–78. [8] ZHANG Shuoyu. The design and implementation of notch filter based on least mean square[C]. 2019 International Conference on Artificial Intelligence, Control and Automation Engineering (AICAE 2019), Wuhan, China, 2019: 198–202. [9] 刘丙伟. 罗兰C接收机抗干扰技术研究[D]. [硕士论文], 电子科技大学, 2012: 41–75.LIU Bingwei. Study on anti-interference technology in Loran-C receiver[D]. [Master dissertation], University of Electronic Science and Technology of China, 2012: 41–75. [10] DINIZ P S R, 刘郁林, 景晓军, 谭刚兵, 译. 自适应滤波算法与实现[M]. 2版. 北京: 电子工业出版社, 2014: 55–57.DINIZ P S R, LIU Yulin, JING Xiaojun, TAN Gangbing, translation. Adaptive Filtering: Algorithms and Practical Implementation[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2014: 55–57. [11] 吕晓德, 孙正豪, 刘忠胜, 等. 基于二阶统计量盲源分离算法的无源雷达同频干扰抑制研究[J]. 电子与信息学报, 2020, 42(5): 1288–1296. doi: 10.11999/JEIT190178LU Xiaode, SUN Zhenghao, LIU Zhongsheng, et al. Research on suppressing co-channel interference of passive radar based on blind source separation using second order statistics[J]. Journal of Electronics &Information Technology, 2020, 42(5): 1288–1296. doi: 10.11999/JEIT190178 [12] 周围. 北斗导航自适应抗干扰算法研究及FPGA实现[D]. [硕士论文], 电子科技大学, 2020.ZHOU Wei. Research and FPGA implementation of BD navigation adaptive anti-jamming algorithm[D]. [Master dissertation], University of Electronic Science and Technology of China, 2020. [13] 黄淼. 动态心电信号自适应干扰消除算法的研究与实现[D]. [硕士论文], 电子科技大学, 2020.HUANG Miao. Research and implementation of adaptive interference elimination algorithm for dynamic ECG signals[D]. [Master dissertation], University of Electronic Science and Technology of China, 2020. [14] 丁玉美, 阔永红, 高新波. 数字信号处理: 时域离散随机信号处理[M]. 西安: 西安电子科技大学出版社, 2002: 123–126.DING Yumei, KUO Yonghong, and GAO Xinbo. Digital Signal Processing: Time Domain Discrete Random Signal Processing[M]. Xi’an: Xidian University Press, 2002: 123–126. [15] 信息产业部(电子). GB/T 12752-1991 船用罗兰C接收设备通用技术条件[S]. 北京: 国家技术监督局, 1991: 8.GB/T 12752-1991 General specification for marine Loran-C receiving equipment[S]. Beijing: The State Bureau of Quality and Technical Supervision, 1991: 8. -


 下载:
下载:










图(12) / 表(2)
计量
- 文章访问数: 1000
- HTML全文浏览量: 937
- PDF下载量: 85
- 被引次数: 0
