

Dynamic Path Planning for Autonomous Underwater Vehicle Assisted Localization of Underwater Acoustic Aensor Networks
-
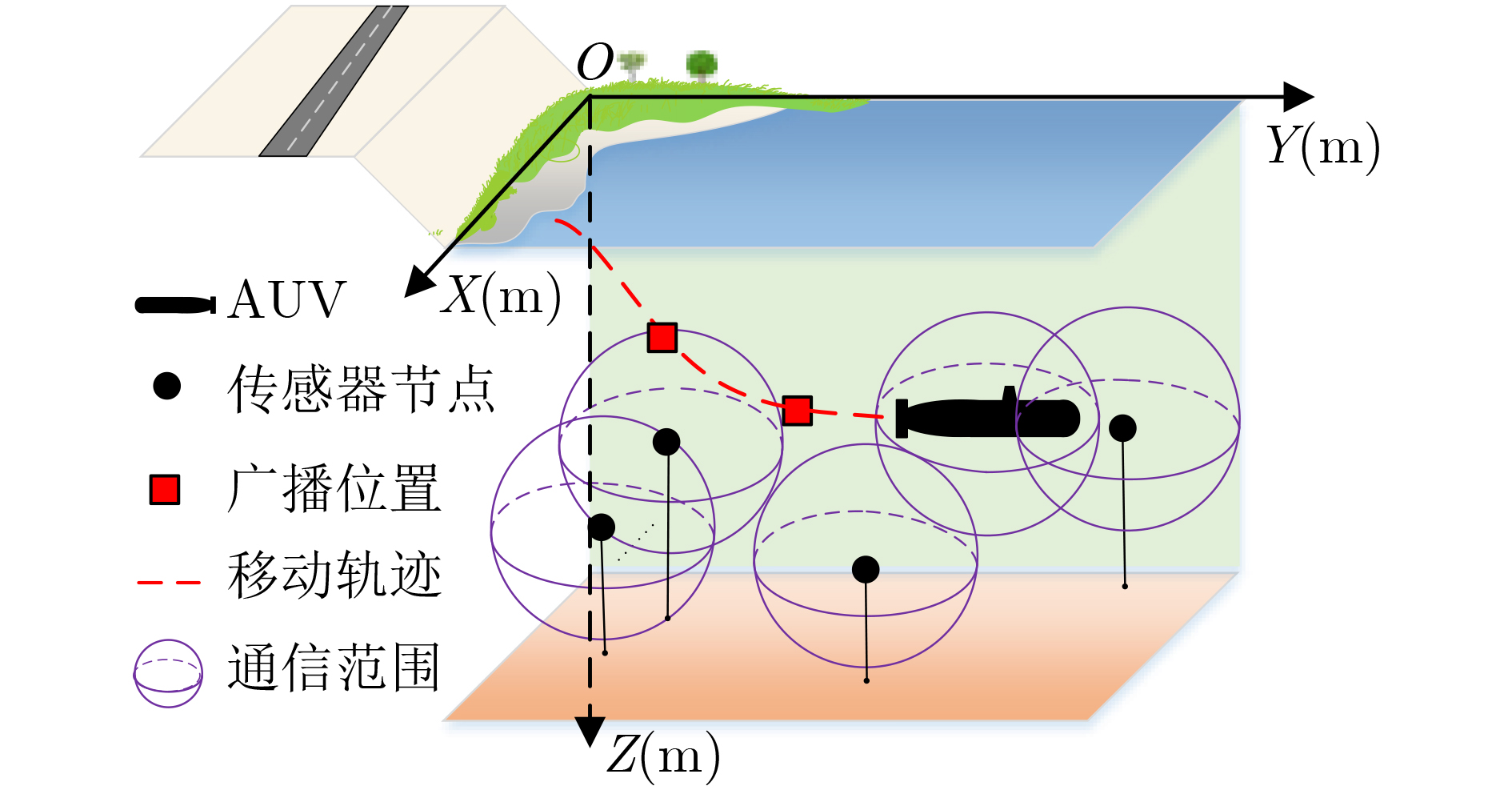
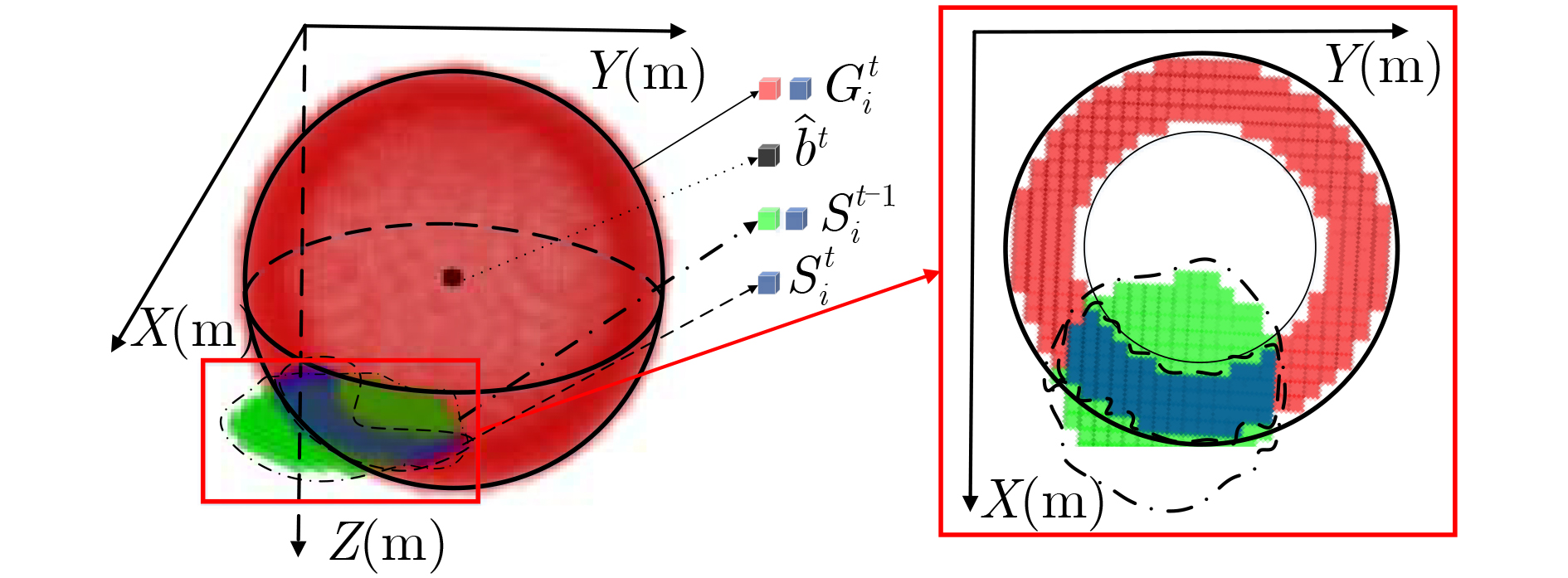
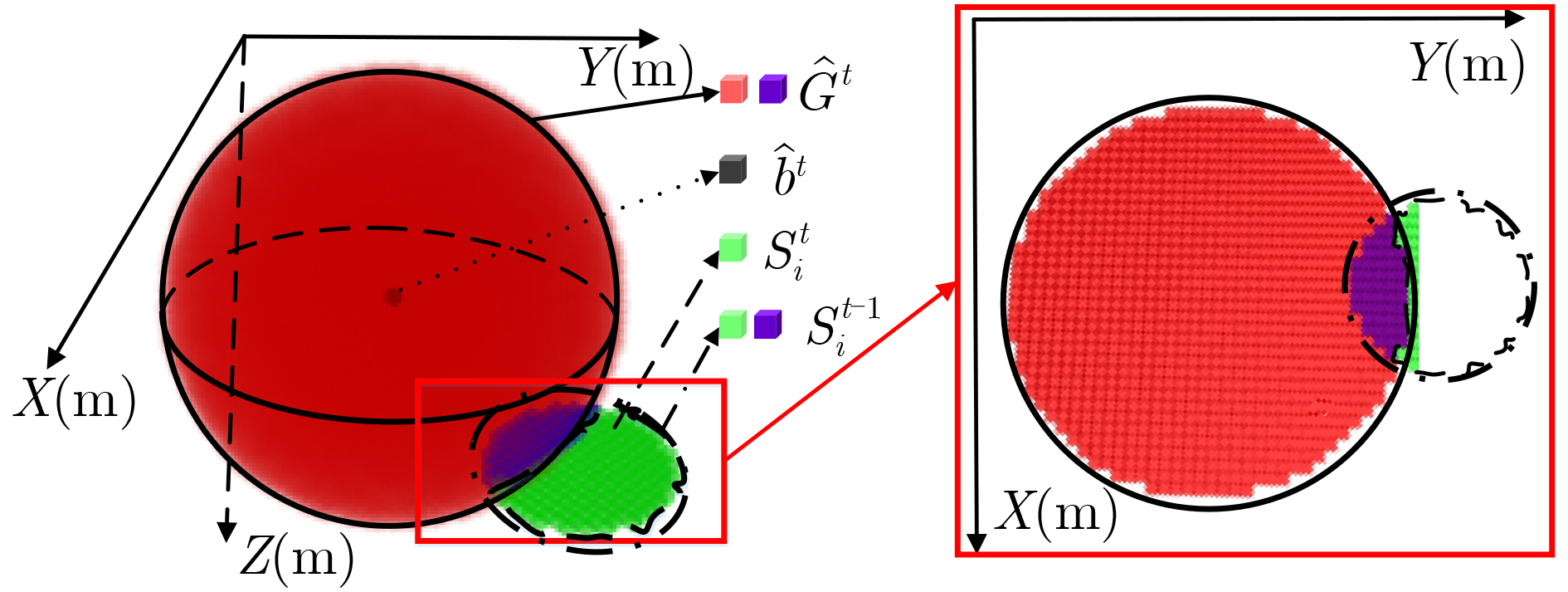
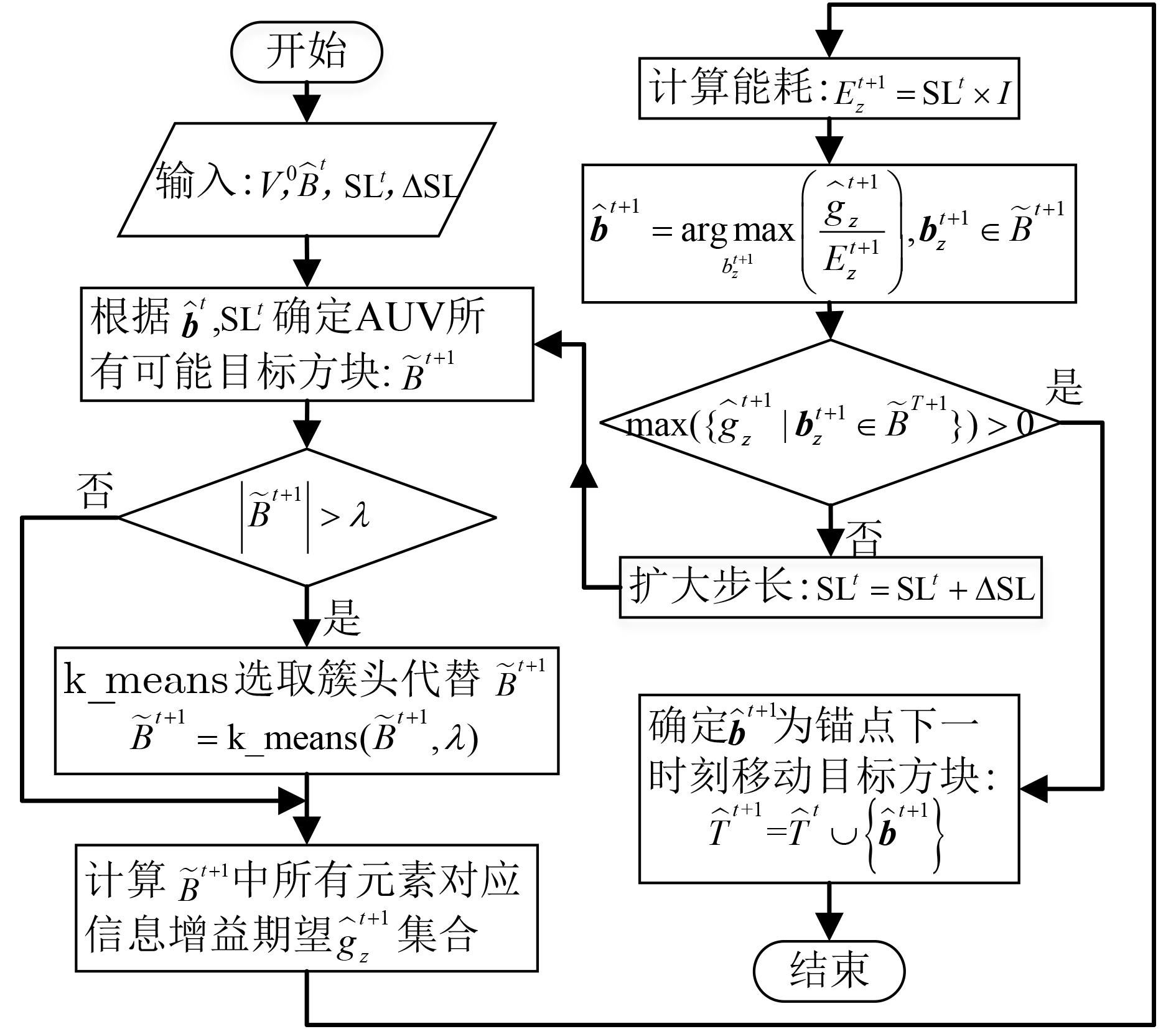
摘要: 水声传感器网络(UASNs)节点由于洋流等因素长时间作用会出现位置偏移,故需要修正其位置信息。在水声传感器网络节点定位中将自主式水下潜器(AUV)作为移动锚点辅助定位可有效降低定位成本,但在AUV辅助定位过程中AUV的能量利用率仍有待提升。为了进一步提高AUV的能量利用率,该文提出一种面向水声传感网的AUV辅助定位动态路径规划方法。该方法中将节点位置修正过程看成节点位置信息熵减少的过程。在AUV动态路径规划时根据定位过程的节点位置信息和预计AUV能耗,规划AUV下一步移动目标位置。使用贪婪算法选取使信息增益期望和移动消耗能量比值最大的位置作为AUV下一步移动目标位置。仿真结果表明,该算法能够在保证节点定位精度的基础上有效提高AUV能量利用率。
-
关键词:
- 水声传感器网络 /
- 自主式水下潜器辅助定位 /
- 路径规划 /
- 信息熵 /
- 能量利用率
Abstract: Due to various effects, such as ocean currents, locations of sensor nodes have to be updated in Underwater Acoustic Sensors Networks (UASNs). In UASNs localization, using an Autonomous Underwater Vehicle (AUV) as the mobile anchor can reduce the localization cost. However, the energy utilization of AUV is not efficient. In order to improve the energy utilization of AUV, a dynamic path planning method is proposed for an AUV-aided localization for UASNs. In this method, the location correction process is regarded as a process of reducing the entropy of location information of sensor nodes. In dynamic path planning, the next target location of the AUV is planned according to the sensor node location information and the expected AUV energy consumption. The greedy algorithm is used to select the location that can obtain the maximum ratio of the expectation of the information gain and mobile energy consumption as the target location. The simulation show that the proposed algorithm can improve the energy efficiency while ensuring the positioning accuracy. -
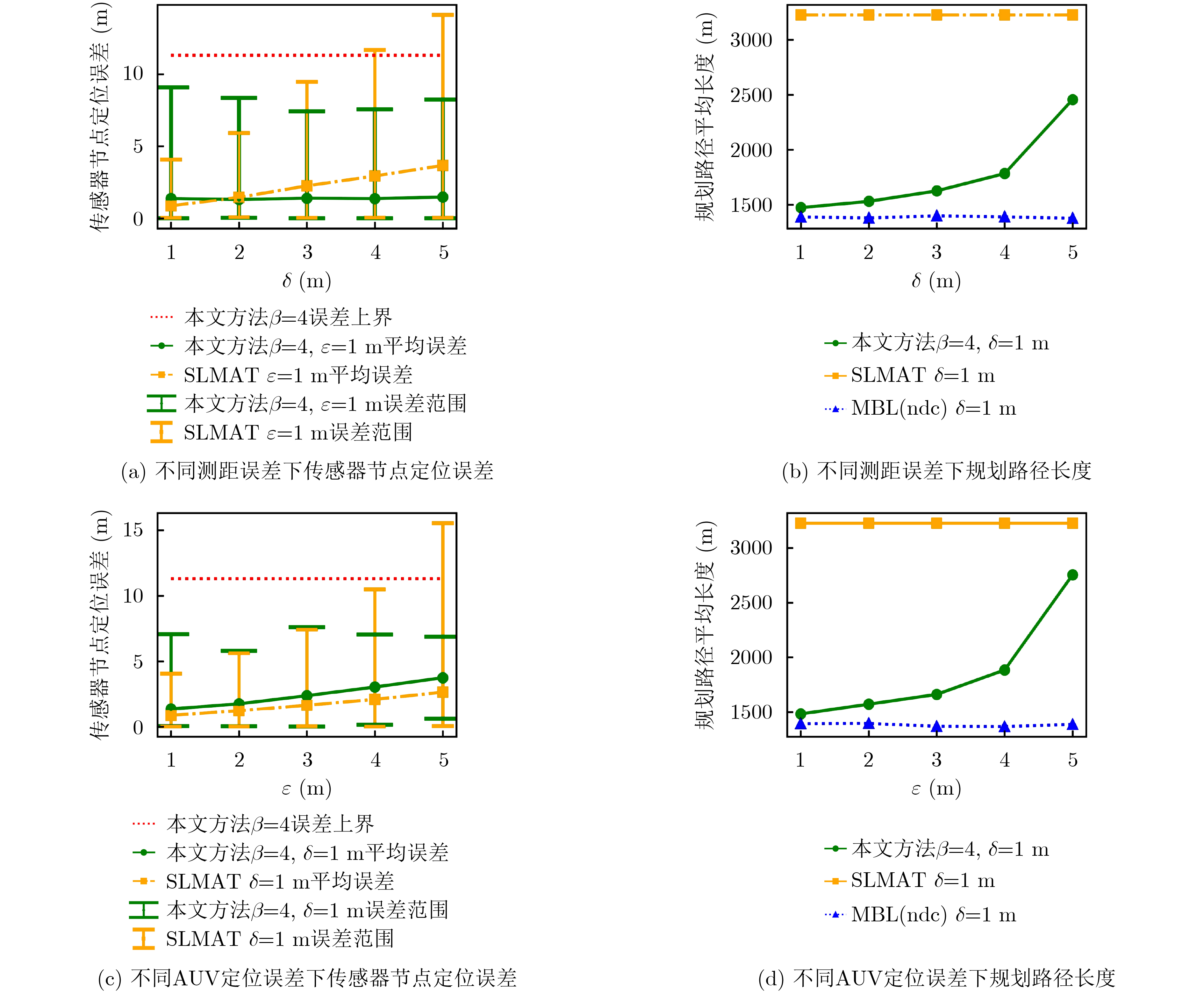
表 1 统计学分析对比
算法 误差均值 (m) 误差标准差 (m) 平均虚拟锚点个数 规划路径长度 (m) 本文方法$ \beta {\text{ = }}4,\varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 1.32 0.73 18.88 1531.61 本文方法$ \beta {\text{ = }}4,\varepsilon {\text{ = 2}},\delta {\text{ = }}3 $ 1.77 0.79 22.27 1825.22 SLMAT $ \varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 1.45 0.74 33.00 3226.41 SLMAT $ \varepsilon {\text{ = 2,}}\delta {\text{ = 3}} $ 2.17 1.12 33.00 3226.41 MBL(ndc) $ \varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 11.28 169.69 29.89 1393.98 MBL(ndc) $ \varepsilon {\text{ = 2,}}\delta {\text{ = }}3 $ 16.16 236.04 29.79 1394.60  下载: 导出CSV
下载: 导出CSV
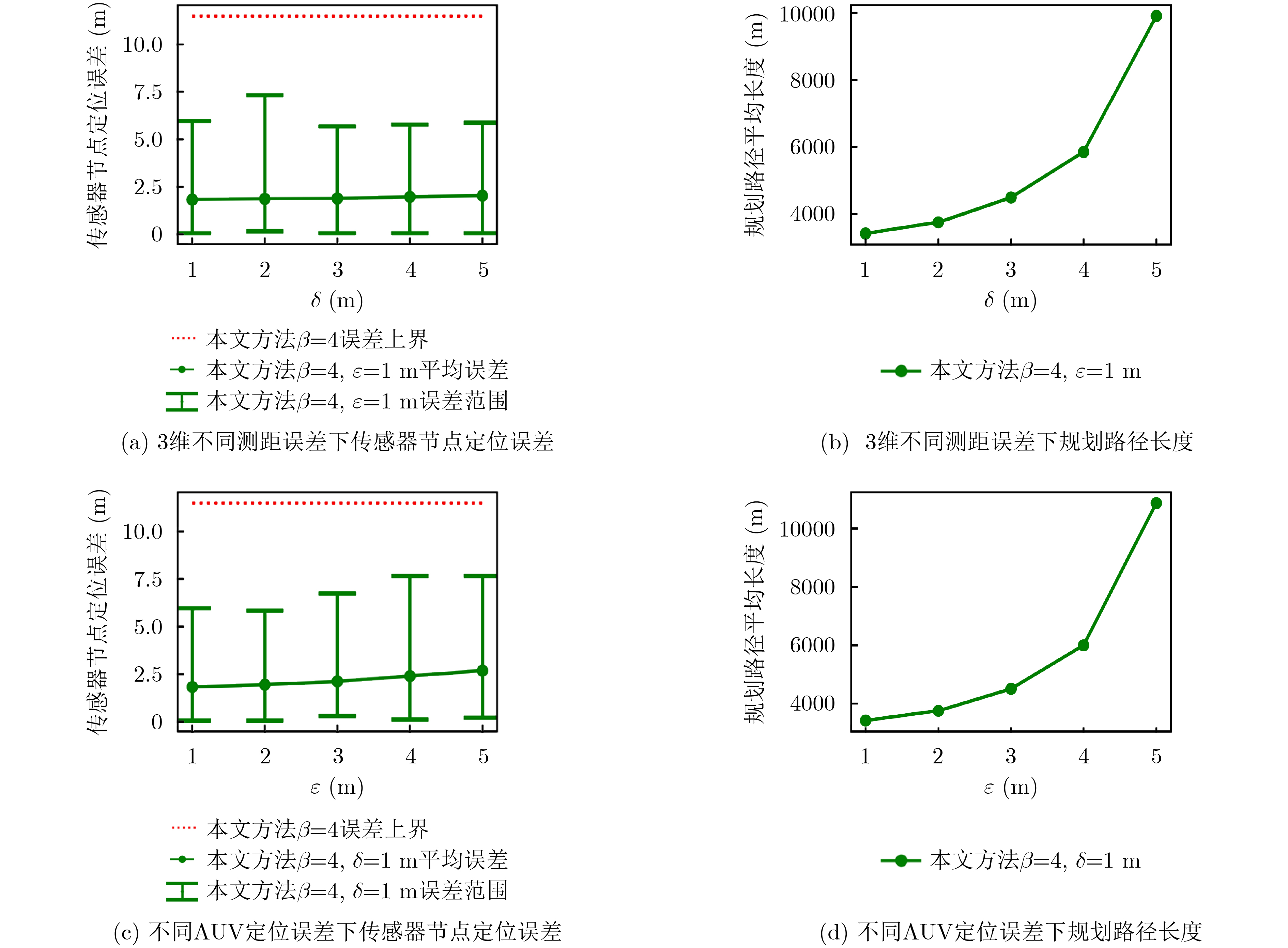
表 2 统计学分析
算法 误差均值 (m) 误差标准差 (m) 平均虚拟锚点个数 规划路径长度(m) 本文方法$ \beta {\text{ = }}4,\varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 1.88 0.77 44.99 3748.25 本文方法$ \beta {\text{ = }}4,\varepsilon {\text{ = 2}},\delta {\text{ = }}3 $ 2.04 0.83 63.21 5262.74 本文方法$ \beta {\text{ = }}5,\varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 2.01 0.93 41.21 3420.12 本文方法$ \beta {\text{ = }}6,\varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 2.54 1.75 34.75 2894.30 本文方法$ \beta {\text{ = }}7,\varepsilon {\text{ = }}1,\delta {\text{ = }}2 $ 3.46 3.08 30.47 2534.89
下载: 导出CSV
-
[1] HAN Guangjie, JIANG Jinfang, ZHANG Chenyu, et al. A survey on mobile anchor node assisted localization in wireless sensor networks[J]. IEEE Communications Surveys & Tutorials, 2016, 18(3): 2220–2243. doi: 10.1109/COMST.2016.2544751 [2] KOUTSONIKOLAS D, DAS S M, and HU Y C. Path planning of mobile landmarks for localization in wireless sensor networks[J]. Computer Communications, 2007, 30(13): 2577–2592. doi: 10.1016/j.comcom.2007.05.048 [3] HAN Guangjie, YANG Xuan, LIU Li, et al. A disaster management-oriented path planning for mobile anchor node-based localization in wireless sensor networks[J]. IEEE Transactions on Emerging Topics in Computing, 2020, 8(1): 115–125. doi: 10.1109/TETC.2017.2687319 [4] 赵方, 马严, 罗海勇, 等. 一种基于网络密度分簇的移动信标辅助定位方法[J]. 电子与信息学报, 2009, 31(12): 2988–2992. doi: 10.3724/SP.J.1146.2008.01532ZHAO Fang, MA Yan, LUO Haiyong, et al. A mobile beacon-assisted node localization algorithm using network-density-based clustering for wireless sensor networks[J]. Journal of Electronics &Information Technology, 2009, 31(12): 2988–2992. doi: 10.3724/SP.J.1146.2008.01532 [5] SALLOUHA H, AZARI M M, and POLLIN S. Energy-constrained UAV trajectory design for ground node localization[C]. 2018 IEEE Global Communications Conference, Abu Dhabi, United Arab Emirates, 2018: 1–7. [6] ALOMARI A, PHILLIPS W, ASLAM N, et al. Dynamic fuzzy-logic based path planning for mobility-assisted localization in wireless sensor networks[J]. Sensors, 2017, 17(8): 1904. doi: 10.3390/s17081904 [7] EROL M, VIEIRA L F M, and GERLA M. AUV-aided localization for underwater sensor networks[C]. International Conference on Wireless Algorithms, Systems and Applications, Chicago, USA, 2007: 44–54. [8] XIA Youjie, WANG Yiyin, MA Xiaoli, et al. Joint time synchronization and localization for underwater acoustic sensor networks[C]. The 10th International Conference on Underwater Networks & Systems, Arlington, USA, 2015: 43. [9] MRIDULA K M and AMEER P M. Localization under anchor node uncertainty for underwater acoustic sensor networks[J]. International Journal of Communication Systems, 2018, 31(2): e3445. doi: 10.1002/dac.3445 [10] ZHANG Wenbo, HAN Guangjie, WANG Xin, et al. A node location algorithm based on node movement prediction in underwater acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(3): 3166–3178. doi: 10.1109/TVT.2019.2963406 [11] SU Yishan, GUO Lei, JIN Zhigang, et al. A mobile-beacon-based iterative localization mechanism in large-scale underwater acoustic sensor networks[J]. IEEE Internet of Things Journal, 2021, 8(5): 3653–3664. doi: 10.1109/JIOT.2020.3023556 [12] XU Tingting, WANG Jingjing, SHI Wei, et al. A localization algorithm using a mobile anchor node based on region determination in underwater wireless sensor networks[J]. Journal of Ocean University of China, 2019, 18(2): 394–402. doi: 10.1007/s11802-019-3724-x [13] HAN Guangjie, XU Huihui, JIANG Jinfang, et al. Path planning using a mobile anchor node based on trilateration in wireless sensor networks[J]. Wireless Communications and Mobile Computing, 2013, 13(14): 1324–1336. doi: 10.1002/wcm.1192 [14] SU Ruoyu, ZHANG Dengyin, LI Cheng, et al. Localization and data collection in AUV-aided underwater sensor networks: Challenges and opportunities[J]. IEEE Network, 2019, 33(6): 86–93. doi: 10.1109/MNET.2019.1800425 [15] HAN Shuai, XU Sai, MENG Weixiao, et al. Dense-device-enabled cooperative networks for efficient and secure transmission[J]. IEEE Network, 2018, 32(2): 100–106. doi: 10.1109/MNET.2018.1700292 [16] ZHUO Xiaoxiao, LIU Meiyan, WEI Yan, et al. AUV-aided energy-efficient data collection in underwater acoustic sensor networks[J]. IEEE Internet of Things Journal, 2020, 7(10): 10010–10022. doi: 10.1109/JIOT.2020.2988697 [17] KHAN F A, KHAN S A, TURGUT D, et al. Greedy path planning for maximizing value of information in underwater sensor networks[C]. The 39th Annual IEEE Conference on Local Computer Networks Workshops, Edmonton, Canada, 2014: 610–615. [18] GJANCI P, PETRIOLI C, BASAGNI S, et al. Path finding for maximum value of information in multi-modal underwater wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2018, 17(2): 404–418. doi: 10.1109/TMC.2017.2706689 [19] CHEN Shihan, CHEN Yougan, ZHU Jianying, et al. Path-planning analysis of AUV-aided mobile data collection in UWA cooperative sensor networks[C]. 2020 IEEE International Conference on Signal Processing, Communications and Computing, Macau, China, 2020: 1–5. [20] SHANNON C E. A mathematical theory of communication[J]. The Bell System Technical Journal, 1948, 27(3): 379–423. doi: 10.1002/j.1538-7305.1948.tb01338.x -

 下载:
下载:








图(11) / 表(2)
计量
- 文章访问数: 1270
- HTML全文浏览量: 669
- PDF下载量: 114
- 被引次数: 0
