

Full-Duplex Directional Collision Avoidance Medium Access Control Protocol for Underwater Acoustic Networks
-
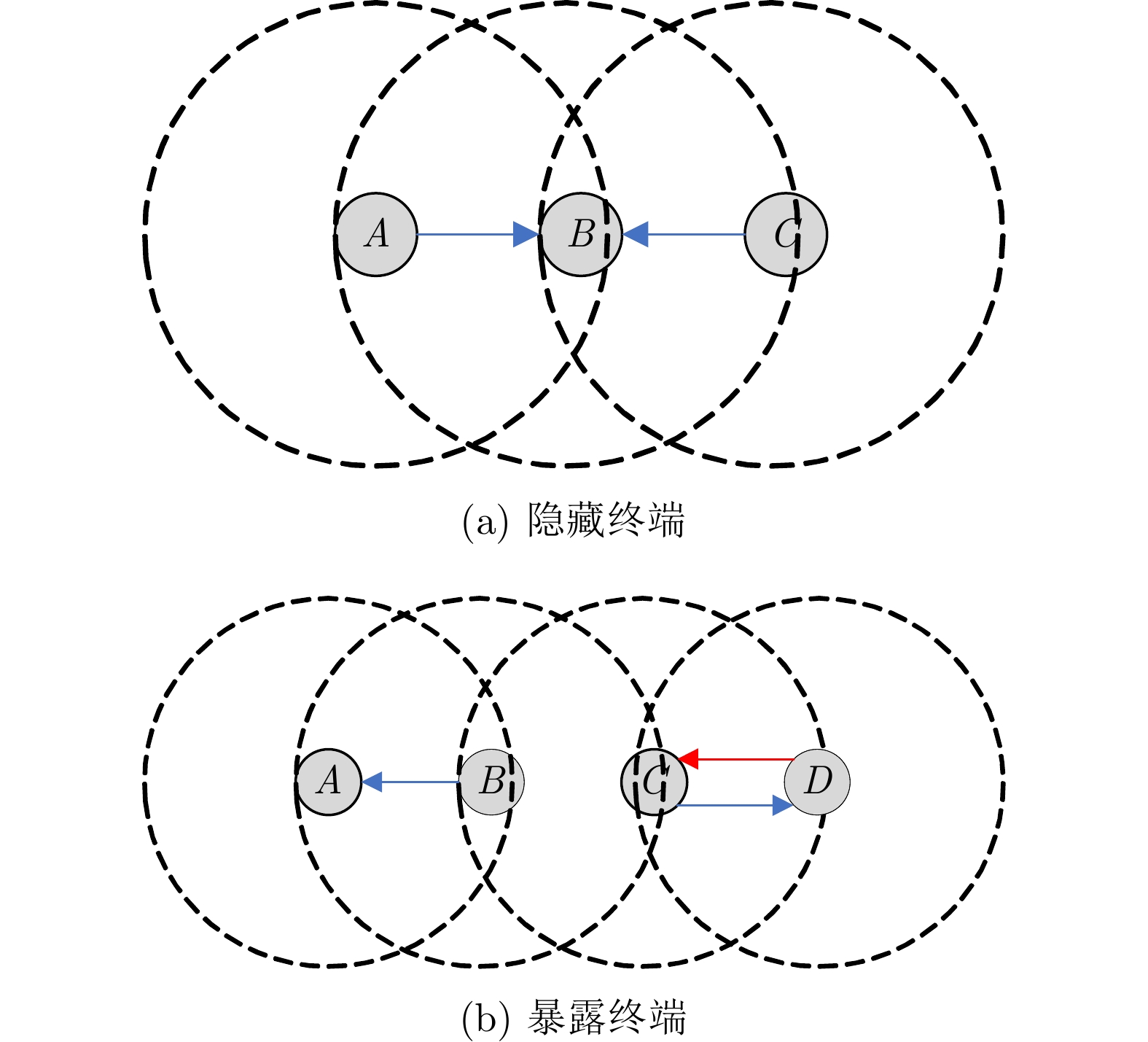
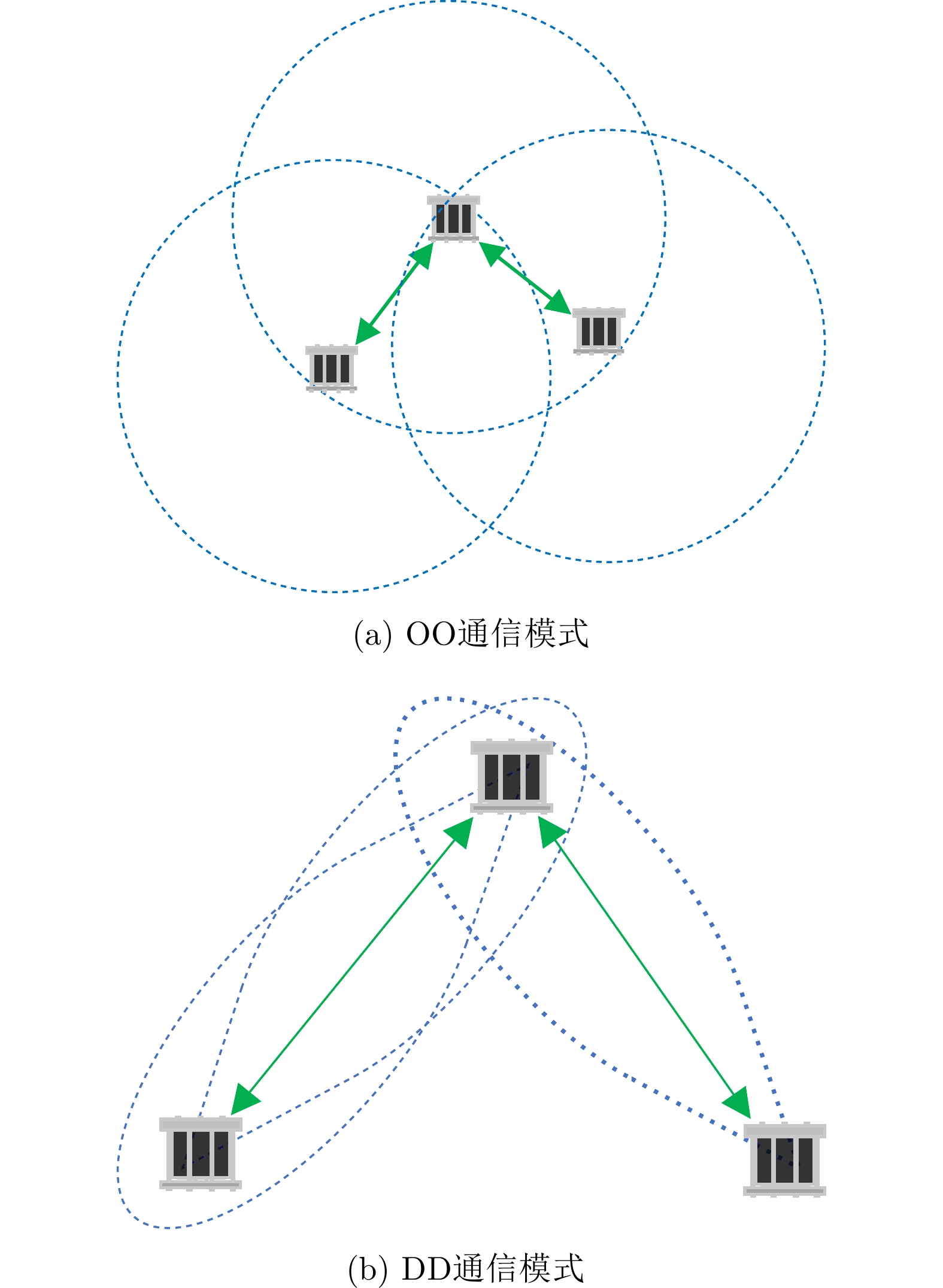
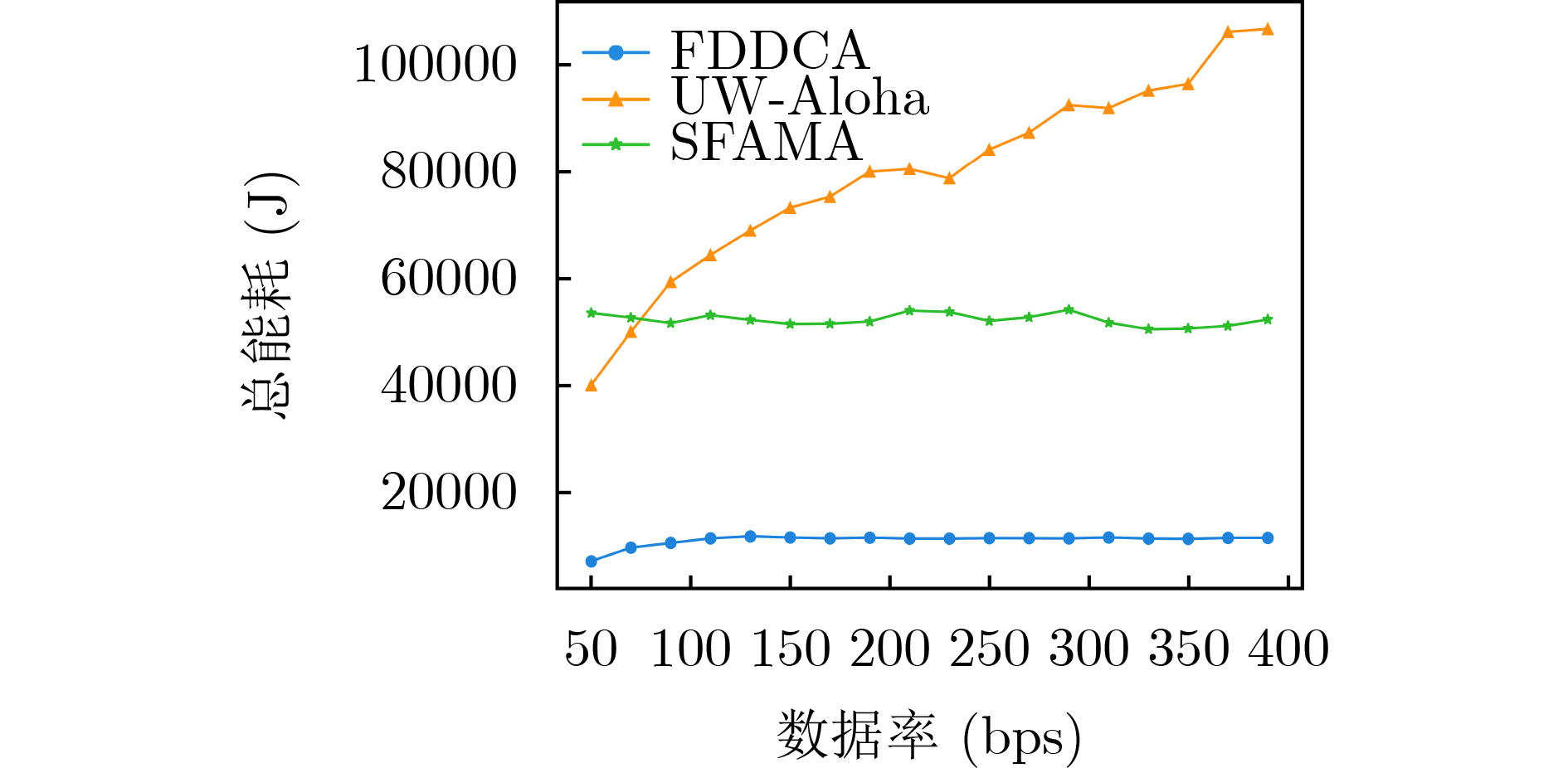
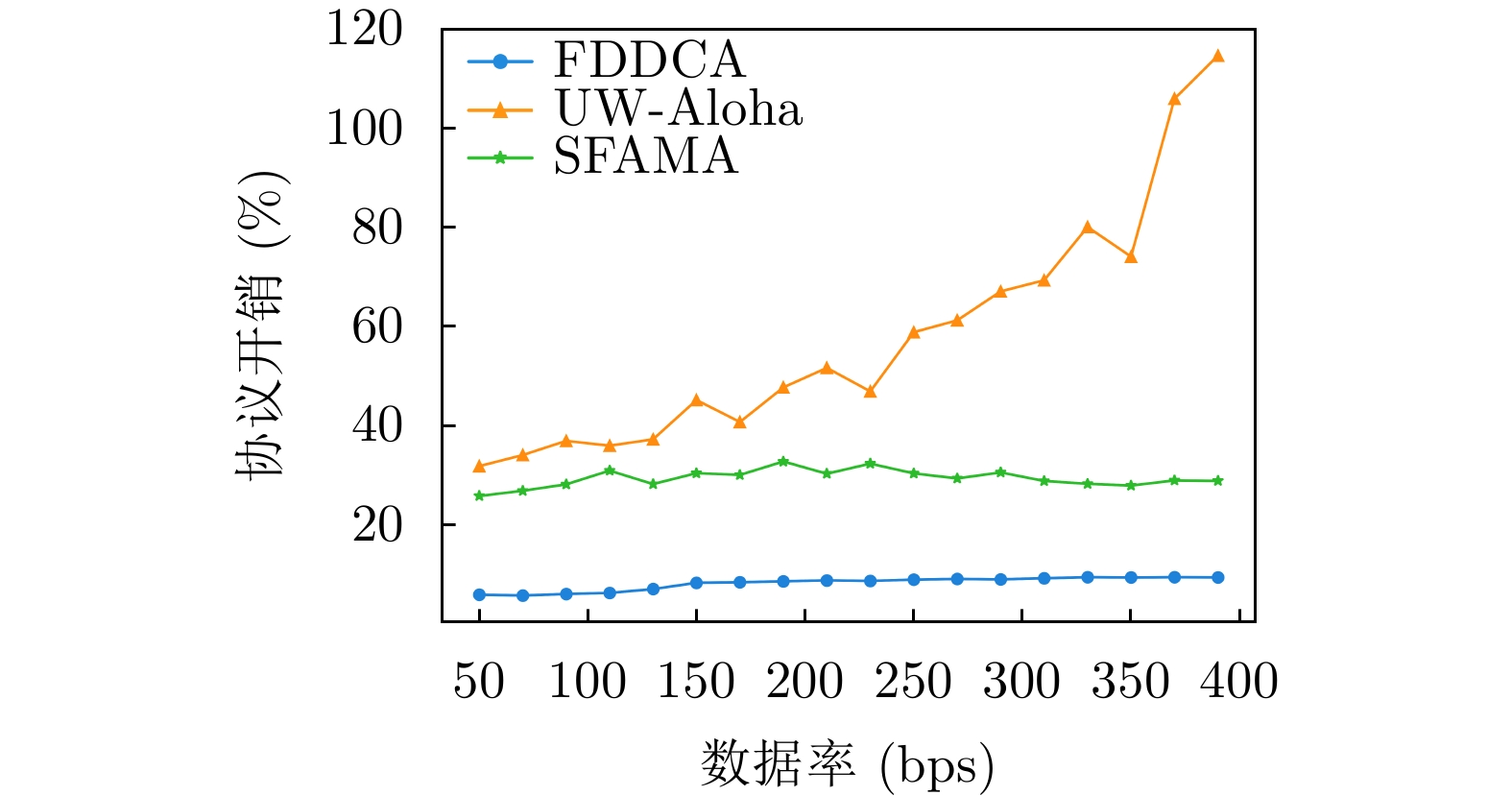
摘要: 近年来水声网络(UAN)技术飞速发展,但仍然面临诸多严峻挑战,能量效率成为水声网络的首要考虑因素。此外,水声信道传播时延大且可用带宽受限,严重制约了水声通信技术的可靠性和有效性,进而限制了水声网络的整体性能。定向通信技术可以有效改善上述情况,通过波束聚焦能力将声波能量聚集在一定角度范围内,获得比全向通信更高的通信范围和信噪比,提升整个网络的能耗效率和空间复用率。但该技术需要对目的节点的位置具备先验知识,且会面临“聋节点”问题,因此该文提出一个水声网络全双工定向碰撞避免(FDDCA)媒体接入控制(MAC)协议,通过装备两个分别处于不同工作频带的全向换能器和定向换能器解决“聋节点”问题,并通过降低节点的冲突域解决了“暴露终端”问题。仿真结果表明,与水下Aloha(UW-Aloha)和时隙地面多址接入(S-FAMA)协议相比,FDDCA在多汇聚节点的网络拓扑下吞吐量分别提升了140%和400%,网络能效上节省了90%和94%。Abstract: A great improvement in Underwater Acoustic Network (UAN) has been witnessed in past few years, but severe challenges still remain, and energy efficiency becomes the primary consideration of UAN. In addition, the reliability and effectiveness of underwater acoustic communication technology are seriously restricted by the large propagation delay of the underwater acoustic channel and the limitation of available bandwidth, and the performance of UAN is limited. Through the ability to focus a beam, the above challenges can be effectively addressed by directional communication technology, resulting in a higher communication range and signal-to-noise ratio than omnidirectional communication, as well as energy consumption efficiency and spatial reuse ratio of the whole network are improved. However, a priori knowledge of the location of the destination node is required and the problem of deafness occurs. Therefore, the Full-Duplex Directional Collision Avoidance (FDDCA) Medium Access Control (MAC) protocol is proposed in this paper, with which the problem of deafness is resolved by using two transducers that work in omnidirectional and directional modes, respectively, as well as the exposed terminal problem. Results supporting the conclusions are shown in the simulations, where 90% and 94% energy savings, 140% and 400% throughput improvements are acquired in different network topologies by FDDCA, compared with UnderWater Aloha (UW-Aloha) and Slotted FAMA (S-FAMA) protocol.
-
表 1 术语解释
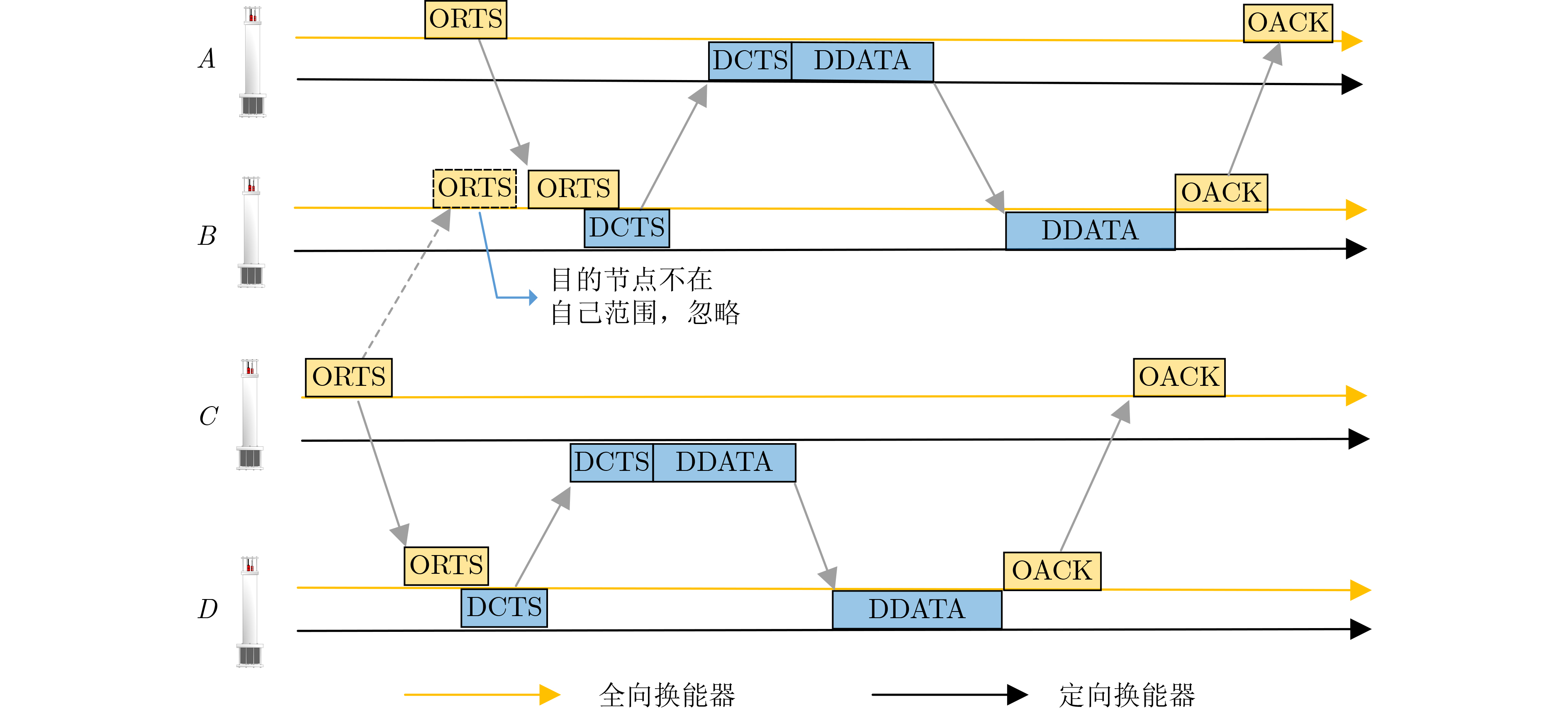
缩略词 英文 含义及目的 ND Neighbor Discovery 邻节点发现 OHELLO Omni-HELLO 一种数据包种类,使用全向模式发送 ORTS Omni-RTS 全向发送的RTS数据包,用于请求发送 DCTS Directional-CTS 定向发送的CTS包,用于清除信道 DDATA Directional-DATA 定向发送DATA,获得高信噪比和能量效率 OEW Omni-EarlyWarning 全向发送的EarlyWarning,用于通知竞争节点退避 OACK Omni-ACK 全向发送的ACK  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数设置
参数 协议类型 FDDCA 对比协议 信号传播范围(m) 2000 2000 信噪比门限(dB) 10 10 数据包大小(Byte) 256 256 数据率(bps) 50~400 50~400 物理层通信速率(bps) 2000 2000 载波频率(kHz) 15,25 25 频带宽度(kHz) 2,5 5 声源级(dB) 134.1,141.1 141.1 功耗(W) 50,9.6 50
下载: 导出CSV
-
[1] 周胜利, 王昭辉, 胡晓毅, 等. OFDM水声通信[J]. 声学学报, 2020, 45(6): 962. doi: 10.15949/j.cnki.0371-0025.2020.06.019ZHOU Shengli, WANG Zhaohui, HU Xiaoyi, et al. OFDM underwater acoustic communication[J]. Acta Acustica, 2020, 45(6): 962. doi: 10.15949/j.cnki.0371-0025.2020.06.019 [2] HEIDEMANN J, STOJANOVIC M, and ZORZI M. Underwater sensor networks: Applications, advances and challenges[J]. Philosophical Transactions of the Royal Society A:Mathematical, Physical and Engineering Sciences, 2012, 370(1958): 158–175. doi: 10.1098/rsta.2011.0214 [3] STOJANOVIC M. On the relationship between capacity and distance in an underwater acoustic communication channel[J]. ACM SIGMOBILE Mobile Computing and Communications Review, 2007, 11(4): 34–43. doi: 10.1145/1347364.1347373 [4] STOJANOVIC M and PREISIG J, Underwater acoustic communication channels: Propagation models and statistical characterization[J]. IEEE Communications Magazine, 2009, 47(1): 84–89. [5] FREITAG L, GRUND M, SINGH S, et al. The WHOI Micro-Modem: An acoustic communications and navigation system for multiple platforms[C]. OCEANS 2005 MTS/IEEE, Washington, United States, 2005. [6] ALFOUZAN F A. Energy-efficient collision avoidance MAC protocols for underwater sensor networks: Survey and challenges[J]. Journal of Marine Science and Engineering, 2021, 9(7): 741. doi: 10.3390/jmse9070741 [7] CLIMENT S, SANCHEZ A, CAPELLA J V, et al. Underwater acoustic wireless sensor networks: Advances and future trends in physical, MAC and routing layers[J]. Sensors, 2014, 14(1): 795–833. doi: 10.3390/s140100795 [8] PELEATO B and STOJANOVIC M. Distance aware collision avoidance protocol for ad-hoc underwater acoustic sensor networks[J]. IEEE Communications Letters, 2007, 11(12): 1025–1027. doi: 10.1109/LCOMM.2007.071160 [9] MOLINS M and STOJANOVIC M. Slotted FAMA: A MAC protocol for underwater acoustic networks[C]. OCEANS 2006 -Asia Pacific, Singapore, 2006. [10] JIANG Shengming. State-of-the-Art Medium Access Control (MAC) protocols for underwater acoustic networks: A survey based on a MAC reference model[J]. IEEE Communications Surveys & Tutorials, 2018, 20(1): 96–131. doi: 10.1109/COMST.2017.2768802 [11] CHIRDCHOO N, SOH W S, and CHUA K C. RIPT: A receiver-initiated reservation-based protocol for underwater acoustic networks[J]. IEEE Journal on Selected Areas in Communications, 2008, 26(9): 1744–1753. doi: 10.1109/jsac.2008.081213 [12] ZHANG Jiarong, MA Xuefei, QIAO Gang, et al. A full-duplex based protocol for underwater acoustic communication networks[C]. OCEANS 2013, San Diego, United States, 2013. [13] NGO Q T, DANG D N M, and LE-TRUNG Q. Extreme power saving directional MAC protocol in IEEE 802.11ah networks[J]. IET Networks, 2020, 9(4): 180–188. doi: 10.1049/iet-net.2019.0176 [14] SCHANDY J, OLOFSSON S, GAMMARANO N, et al. Improving sensor network performance with directional antennas: A cross-layer optimization[J], ACM Transactions On Sensor Networks, 2021, 17(4): 48. [15] DE RANGO F, INZILLO V, and QUINTANA A A. Exploiting frame aggregation and weighted round robin with beamforming smart antennas for directional MAC in MANET environments[J]. Ad Hoc Networks, 2019, 89: 186–203. doi: 10.1016/j.adhoc.2019.03.011 [16] BUTLER J L, BUTLER A L, and BUTLER S C. The modal projector[J]. The Journal of the Acoustical Society of America, 2011, 129(4): 1881–1889. doi: 10.1121/1.3559684 [17] 温梦华. 水下定向无线传感器网络数据链路层与网络层协议研究[D]. [硕士论文], 哈尔滨工程大学, 2020.WEN Menghua. Research on data link layer protocols and network layer protocols for underwater directional wireless sensor networks[D]. [Master dissertation], Harbin Engineering University, 2020. [18] 刘伯胜, 雷家煜. 水声学原理[M]. 2版. 哈尔滨: 哈尔滨工程大学出版社, 2010: 5–6.LIU Bosheng and LEI Jiayu. Principles of Underwater Acoustics[M]. Harbin Engineering University Press, 2rd, 2010: 5–6. [19] ZHAO Chen, QIAO Gang, ZHOU Feng, et al. Underwater localisation correction method for drifting anchor nodes with an extra floating anchor node[J]. IET Radar, Sonar & Navigation, 2020, 14(10): 1494–1501. doi: 10.1049/iet-rsn.2020.0117 [20] PENG Zheng, ZHOU Zhong, CUI Junhong, et al. Aqua-Net: An underwater sensor network architecture: Design, implementation, and initial testing[C]. OCEANS 2009, Biloxi, United States, 2009. -

 下载:
下载:









图(15) / 表(2)
计量
- 文章访问数: 1661
- HTML全文浏览量: 880
- PDF下载量: 143
- 被引次数: 0
