

A High-precision Long-baseline Positioning Method for Underwater Volume Target
-
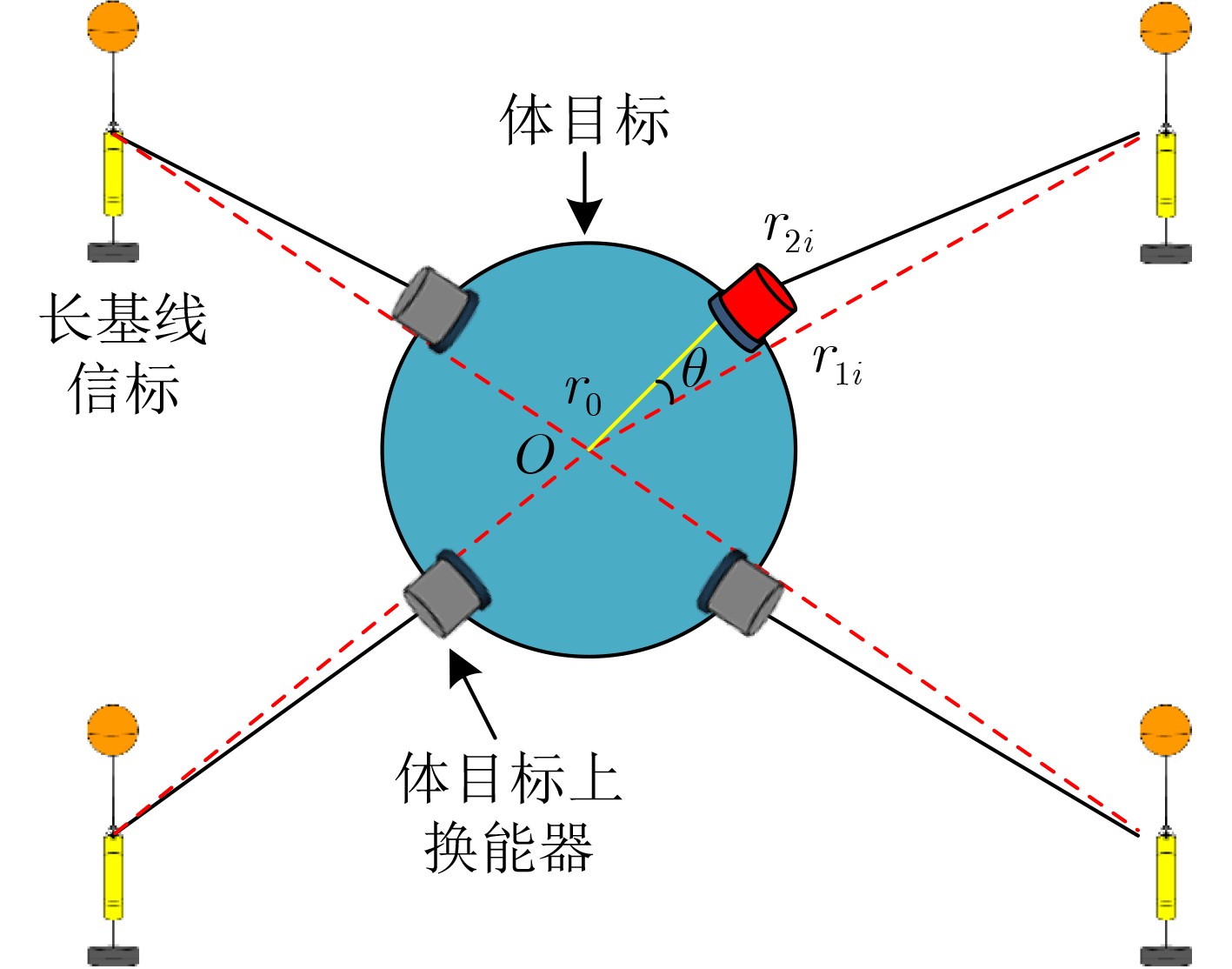
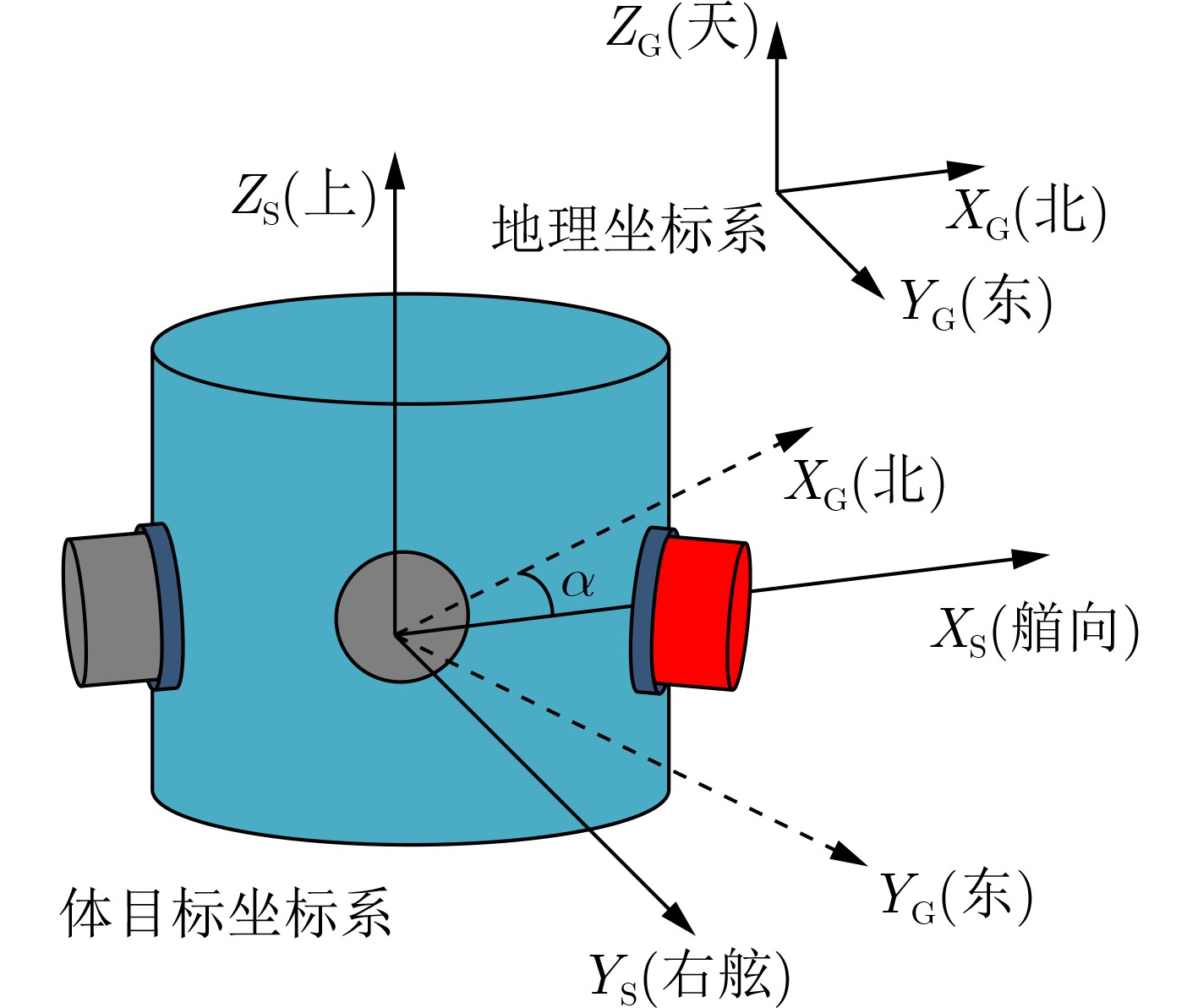
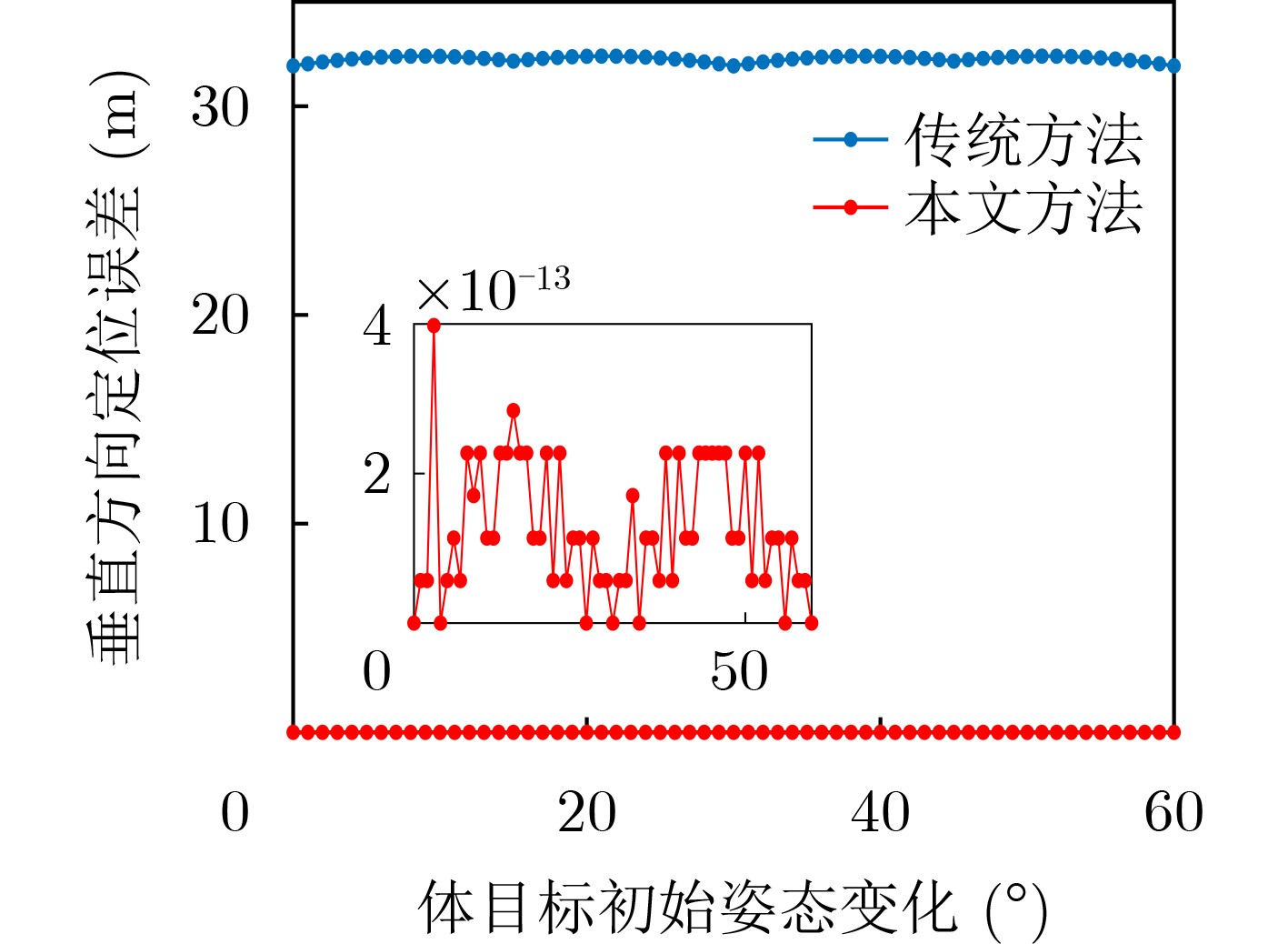
摘要: 水下体目标几何尺度大、运动姿态未知等因素,会导致传统长基线定位模型失配。该文针对此问题,通过体目标姿态、位置联合估计,消除模型误差,实现体目标几何中心的归算,得到了一种水下体目标的长基线高精度定位方法。理论分析及数值仿真结果表明,体目标半径大尺度下模型误差不可忽略,在体目标半径5 m,测距精度0.2 m的条件下,较传统长基线定位方法,将垂直定位精度从32 m提升至0.5 m,实现亚米级精度定位。Abstract: When positioning underwater volume target using traditional long baseline positioning model, the large geometric scale and unavailable attitude of the volume target always leads to model mismatch problems. In this paper, a long baseline high-precision positioning method for underwater volume target is proposed. The method eliminates the model error and realizes the approximate reduction of the geometric center of the volume target through the joint estimation of the attitude and position coordinates. Theoretical analysis and Numerical simulation results show that the large scale of the radius of the volume target affects the positioning accuracy. The proposed method achieved sub-meter accuracy positioning and improved the vertical positioning accuracy from 32 m to 0.5 m compared with the traditional long baseline positioning method under the conditions of a target radius of 5 m and a ranging accuracy of 0.2 m.
-
Key words:
- Long baseline positioning /
- Volume target /
- Model error
-
算法1 体目标长基线定位方法 输入:长基线信标在地理坐标系坐标${\boldsymbol{X}}_i^{\rm G}$、量测距离${\boldsymbol{R}}$、体目标
上换能器的编号${\boldsymbol{P}}$、体目标半径${r_0}$输出:体目标质心在地理坐标系坐标${\boldsymbol{X}}_t^{\rm G}$,体目标姿态$\alpha $ (1)选择体目标质心在地理坐标系坐标、体目标姿态的迭代初值
${\boldsymbol{X}}_{t\left( 0 \right)}^{\rm G}$,${\alpha _{\left( 0 \right)}}$,令flag=1,(flag为标志位)(2)根据体目标半径${r_0}$计算体目标上第$k$个换能器在体目标坐标系
下的坐标${\boldsymbol{X} }_k^{\rm{S}}$(3)当满足flag=1时 (4)根据${\boldsymbol{X}}_{t\left( 0 \right)}^{\rm G}$,${\alpha _{\left( 0 \right)}}$,${\boldsymbol{X} }_k^{\rm{S}}$,${\boldsymbol{X}}_i^{\rm G}$,${\boldsymbol{P}}$,${\boldsymbol{R}}$计算目标函数值${\phi _0}$ (5)将观测方程线性化,并计算体目标质心、体目标姿态的更新
值${\boldsymbol{X}}_{t\left( 1 \right)}^{\rm G}$,${\alpha _{\left( 1 \right)}}$(6)根据${\boldsymbol{X}}_{t\left( 1 \right)}^{\rm G}$,${\alpha _{\left( 1 \right)}}$,${\boldsymbol{X} }_k^{\rm{S}}$,${\boldsymbol{X}}_i^{\rm G}$,${\boldsymbol{P}}$,${\boldsymbol{R}}$计算新的目标函数值${\phi _1}$ (7)若$\left| {{\phi _0} - {\phi _1}} \right| < \varepsilon $, $\left( {\varepsilon = {{10}^{ - 7}}} \right)$,那么 (8)令 flag=0, ${\boldsymbol{X}}_t^{\rm G} = {\boldsymbol{X}}_{t\left( 1 \right)}^{\rm G}$, $\alpha = {\alpha _{\left( 1 \right)}}$ (9)否则,令${\boldsymbol{X}}_{t\left( 0 \right)}^{\rm G} = {\boldsymbol{X}}_{t\left( 1 \right)}^{\rm G}$, ${\alpha _{\left( 0 \right)}} = {\alpha _{\left( 1 \right)}}$ (10)继续循环 (11)结束  下载: 导出CSV
下载: 导出CSV
-
[1] 孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊, 2019, 34(3): 331–338. doi: 10.16418/j.issn.1000-3045.2019.03.011SUN Dajun, ZHENG Cui’e, ZHANG Jucheng, et al. Development and prospect for underwater acoustic positioning and navigation technology[J]. Bulletin of the Chinese Academy of Sciences, 2019, 34(3): 331–338. doi: 10.16418/j.issn.1000-3045.2019.03.011 [2] 李浩铭, 鄢社锋, 徐立军, 等. 基于射线声学的水下传感网络静默定位算法[J]. 电子与信息学报, 2021, 43(3): 781–787. doi: 10.11999/JEIT200383LI Haoming, YAN Shefeng, XU Lijun, et al. A silent location algorithm for underwater sensor network based on ray acoustics[J]. Journal of Electronics &Information Technology, 2021, 43(3): 781–787. doi: 10.11999/JEIT200383 [3] 吴永亭. LBL精密定位理论方法研究及软件系统研制[D]. [博士论文], 武汉大学, 2013.WU Yongting. Study on theory and method of precise LBL positioning and development of positionig software system[D]. [Ph. D. dissertation], Wuhan University, 2013. [4] 韩云峰, 郑翠娥, 孙大军. 长基线定位系统高精度阵型标定方法[J]. 声学学报, 2016, 41(4): 456–464. doi: 10.15949/j.cnki.0371-0025.2016.04.002HAN Yunfeng, ZHENG Cui’e, and SUN Dajun. A high precision calibration method for long baseline acoustic positioning systems[J]. Acta Acustica, 2016, 41(4): 456–464. doi: 10.15949/j.cnki.0371-0025.2016.04.002 [5] 孙大军, 郑翠娥. 水声导航、定位技术发展趋势探讨[J]. 海洋技术, 2015, 34(3): 64–68.SUN Dajun and ZHENG Cui’e. Study on the development trend of underwater acoustic navigation and positioning technologies[J]. Journal of Ocean Technology, 2015, 34(3): 64–68. [6] 张居成. 深水长基线定位导航技术研究[D]. [博士论文], 哈尔滨工程大学, 2014.ZHANG Jucheng. Research of deepwater LBL positioning and navigation technology[D]. [Ph. D. dissertation], Harbin Engineering University, 2014. [7] 张旭, 韩旭, 辛健. 垂向航行体水下多元阵测量精度仿真算法[J]. 探测与控制学报, 2017, 39(3): 86–91.ZHANG Xu, HAN Xu, and XIN Jian. Underwater vertical vehicle measuring accuracy simulation based on seabed multielement array[J]. Journal of Detection &Control, 2017, 39(3): 86–91. [8] 李敏, 孙贵青, 李启虎. 分布式浮标阵水下高速运动声源三维被动定位[J]. 声学学报, 2009, 34(4): 289–295. doi: 10.3321/j.issn:0371-0025.2009.04.001LI Min, SUN Guiqing, and LI Qihu. Three dimensional passive localization based on distributed buoy array for underwater moving sound source with high speed[J]. Acta Acustica, 2009, 34(4): 289–295. doi: 10.3321/j.issn:0371-0025.2009.04.001 [9] 孟庆波, 王振杰, 王柏杨, 等. 一种改进的水下声学定位算法[J]. 海洋科学, 2019, 43(11): 84–90. doi: 10.11759/hykx20190109004MENG Qingbo, WANG Zhenjie, WANG Boyang, et al. An improved underwater acoustic localization algorithm[J]. Marine Sciences, 2019, 43(11): 84–90. doi: 10.11759/hykx20190109004 [10] 张旭, 孙翱, 韩旭, 等. 一种适用于水下垂向运动目标的长基线水声定位方法[J]. 南京大学学报:自然科学版, 2017, 53(4): 629–637. doi: 10.13232/j.cnki.jnju.2017.04.002ZHANG Xu, SUN Ao, HAN Xu, et al. A method of long baseline acoustic positioning for underwater vertical moving target[J]. Journal of Nanjing University:Natural Science, 2017, 53(4): 629–637. doi: 10.13232/j.cnki.jnju.2017.04.002 [11] CHENG Xiuzhen, SHU Haining, LIANG Qilian, et al. Silent positioning in underwater acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2008, 57(3): 1756–1766. doi: 10.1109/TVT.2007.912142 [12] 刘杰. 水下垂向运动目标长基线测量方法研究[D]. [硕士论文], 哈尔滨工程大学, 2016.LIU Jie. Study on the vertical motion target of long baseline underwater measurement method[D]. [Master dissertation], Harbin Engineering University, 2016. [13] 张旭, 孙翱, 韩旭, 等. 水下垂向运动目标的海底多基站声定位方法及精度分析[J]. 声学学报, 2019, 44(2): 155–169. doi: 10.15949/j.cnki.0371-0025.2019.02.002ZHANG Xu, SUN Ao, HAN Xu, et al. Acoustic localization scheme and accuracy analysis for underwater vertical motion target using multi-stations in the seabed[J]. Acta Acustica, 2019, 44(2): 155–169. doi: 10.15949/j.cnki.0371-0025.2019.02.002 [14] ZHAO Jianhu, ZOU Yajing, ZHANG Hongmei, et al. A new method for absolute datum transfer in seafloor control network measurement[J]. Journal of Marine Science and Technology, 2016, 21(2): 216–226. doi: 10.1007/s00773-015-0344-z [15] SUN Dajun, DING Jie, ZHENG Cui’e, et al. An underwater acoustic positioning algorithm for compact arrays with arbitrary configuration[J]. IEEE Journal of Selected Topics in Signal Processing, 2019, 13(1): 120–130. doi: 10.1109/JSTSP.2019.2899732 -


 下载:
下载:







图(9) / 表(3)
计量
- 文章访问数: 1685
- HTML全文浏览量: 1540
- PDF下载量: 147
- 被引次数: 0
