

Research on Flow Scheduling Mechanism for Spacecraft Wired Wireless Hybrid Scenario
-
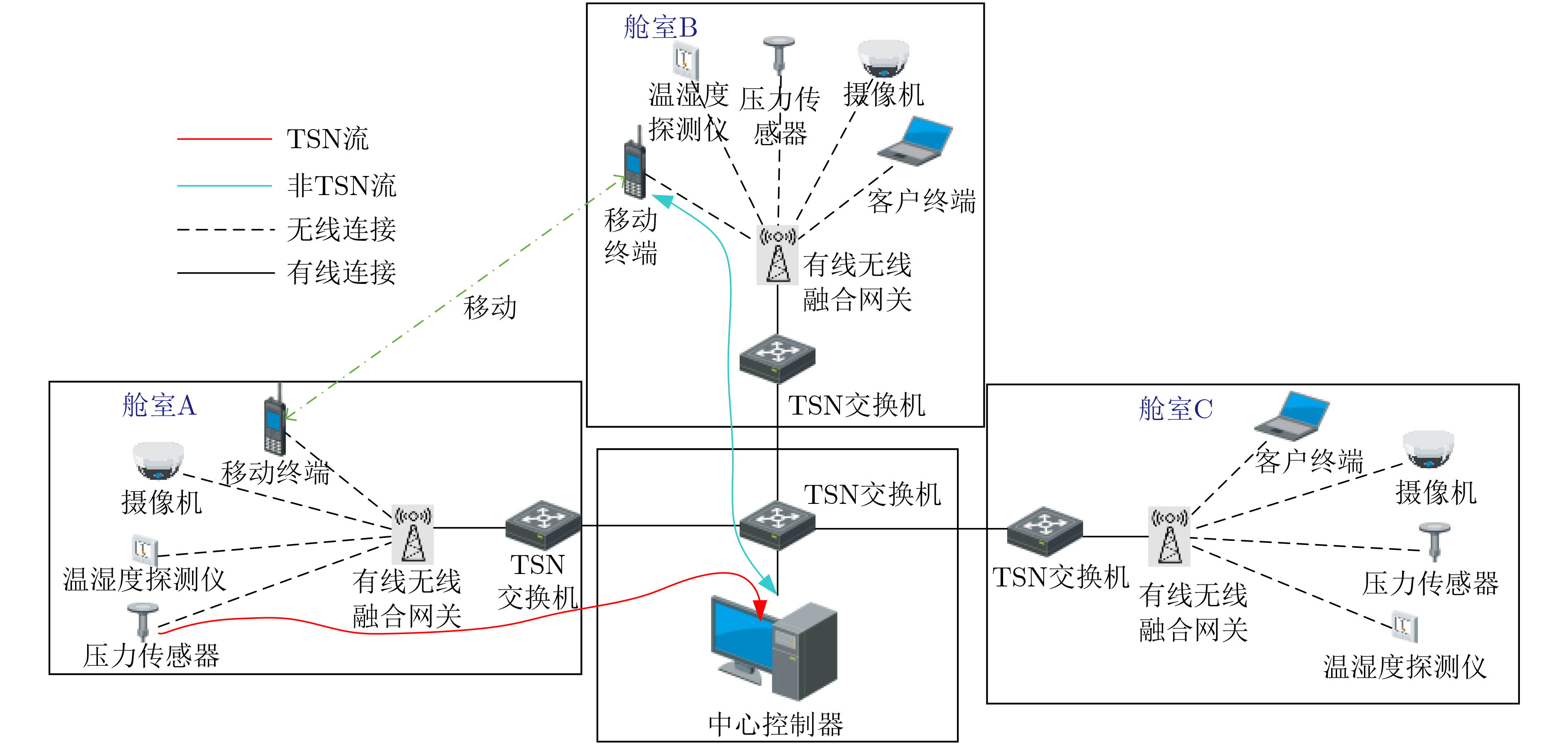
摘要: 随着各国深空探测任务的开展,空间站的建设需求日益增加,而航天器内部大量的数据通信总线在一定程度上影响了航天器的有效载荷。因此,该文将无线通信方式引入到航天器通信系统设计中,但传统无线通信难以保障时敏数据的端到端传输时延,该文提出了一种有线无线融合的时间敏感网络(TSN)流调度方案。设计了一种上下行时隙分离的TDMA时隙分配机制,通过对航天器内部业务类型与有线无线融合传输链路的时延关系进行建模分析,构建了以时敏业务平均端到端时延最小的目标函数,采用粒子群算法对时隙分配方案进行快速求解。最后在Pycharm平台对所提算法进行对比测试,并在EXata网络仿真平台搭建航天传感器采集网络进行验证。实验结果表明,该文所提出的有线无线融合流调度方案能为时敏业务提供稳定、有界的时延保障。Abstract: With the development of deep-space explorations in various countries, the demand for construction of space stations is increasing. However, a large number of data communication buses inside the spacecraft affect the payload of spacecraft to a certain extent. The wireless communication is introduced into spacecraft communication system. But, the traditional wireless communication can not guarantee the end-to-end delay for time-sensitive traffic. Therefore, this paper proposes a flow scheduling scheme for wire and wireless converged time-sensitive network. Firstly, a TDMA time slot allocation mechanism with separation of uplink and downlink communication is designed, the delay relationship between the type of services inside the spacecraft and the wired and wireless converged transmission link is modeling and analyzed. An objective function with the minimum average end-to-end delay of time-sensitive traffic is built. The time-slot allocation scheme is solved quickly by the particle swarm optimization algorithm. Finally, the proposed algorithm is tested on the Pycharm platform. Furthermore, a spacecraft sensor acquisition network is built on the EXata network simulation platform to test the performance. The results show that the proposed scheme can provide stable and bounded delay guarantees for time-sensitive traffic.
-
Key words:
- Spacecraft /
- Wired wireless integration /
- Time Sensitive Network (TSN) /
- Slot allocation
-
算法1 PSO-TSN算法 Input: 网络设备数$ N $,无线传输速率$ v $,设备业务量大小$ B_n^s $,种
群数量$ Np $,最大迭代数maxCycle,惯性权重$ w $,TDMA
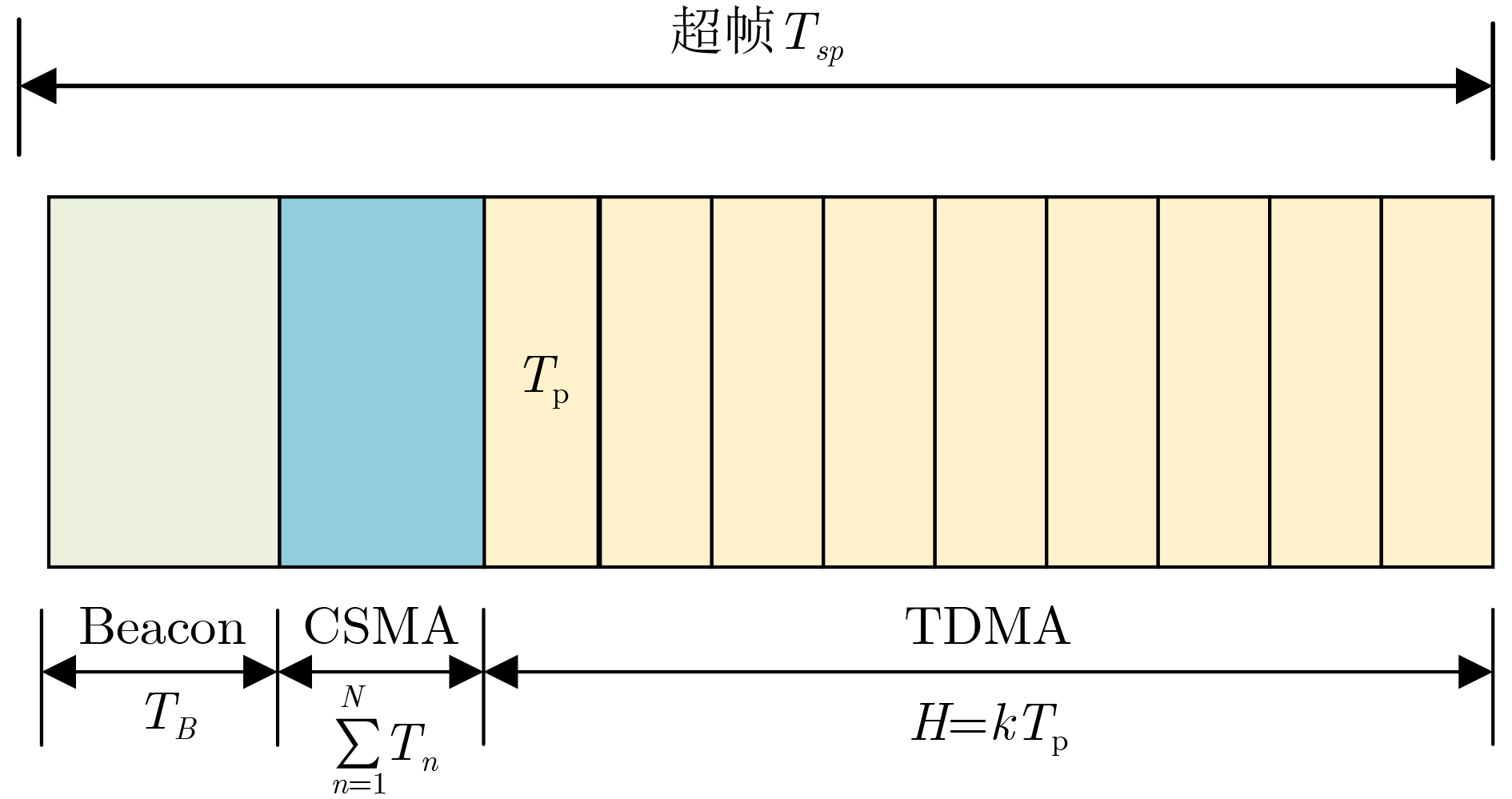
时隙起始位置$ {T_{\text{b}}} $,结束位置$ {T_{\text{e}}} $,单位时隙长度$ {T_{\text{p}}} $Output: 网络最低时延、时隙最佳位置 1. for $ i $=1 to$ N $ 2. for $ j $= 1 to $ Np $ 3. $ p(i,j) $ = randn($ {T_{\text{b}}} $,$ {T_{\text{e}}} $)//初始化粒子所处位置 4. $ v(i,j) $ = $ {T_{\text{p}}} $ //初始化粒子速度 5. end for 6. end for 7. ${\rm{gBest}}$ = min{${\rm{pBest}}$} 8. for $ i $ = 1 to$ N $ 9. while Cycle ≤ maxCycle 10. for $ j $ =1 to$ Np $ 11. update $ p(i) $,$ v(i) $ 12. if fit($ p(i,j) $) < fit(${\rm{pBest}}(i,j)$) 13. ${\rm{pBest}}(i,j)$ = $ p(i,j) $ 14. if fit(${\rm{pBest}}(i,j)$)<fit(${\rm{gBest}}(i)$) 15. ${\rm{gBest}}(i)$ = ${\rm{pBest}}(i,j)$ 16. end for 17. end while 18. end for 19. for $ i $ =1 to$ N $ 20. best_position = F(${\rm{gBest}}(i)$) 21. min_delay = F(${\rm{gBest}}(i)$) 22. end for  下载: 导出CSV
下载: 导出CSV
表 2 仿真业务参数
业务类型 源端 目的端 周期(ms) 业务量(bit) 压力传感信息 终端32 终端22 5 500 终端35 终端22 5 500 温度传感信息 终端30 终端22 100 700 终端3 终端18 100 700 视频监控信息 终端27 终端22 500 3000 终端9 终端16 500 3000 客户端信息 终端15 终端22 – 1000 终端17 终端5 – 1000
下载: 导出CSV
-
[1] RATIU O, PANAGIOTOPOULOS N, VOS S, et al. Wireless transmission of sensor data over UWB in spacecraft payload networks[C]. 2018 6th IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Huntsville, USA, 2018: 131–136. [2] 何熊文. 一种航天器综合电子系统业务及协议体系架构设计[J]. 航天器工程, 2017, 26(1): 71–78. doi: 10.3969/j.issn.1673-8748.2017.01.011HE Xiongwen. Service and protocol architecture design of spacecraft avionics system[J]. Spacecraft Engineering, 2017, 26(1): 71–78. doi: 10.3969/j.issn.1673-8748.2017.01.011 [3] KOO C H and KIM H. Measurement of cache-related preemption delay for spacecraft computers[C]. 2018 IEEE 24th International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hakodate, Japan, 2018: 234–235. [4] KIM M, MIN Junhong, HYEON D, et al. TAS scheduling for real-time forwarding of emergency event traffic in TSN[C]. 2020 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea (South), 2020: 1111–1113. [5] XU Di and YAO Li. Research on scheduling algorithm for industrial Internet of Things[C]. 2020 International Conference on Big Data & Artificial Intelligence & Software Engineering (ICBASE), Bangkok, Thailand, 2020: 301–305. [6] TIAN Zhuang. Research on wireless local area network in large scale manned spacecraft[C]. 2020 IEEE 3rd International Conference on Electronic Information and Communication Technology (ICEICT), Shenzhen, China, 2020: 35–38. [7] DIAB R, CHALHOUB G, and MISSON M. Evaluation of a hybrid multi-channel MAC protocol for periodic and burst traffic[C]. 39th Annual IEEE Conference on Local Computer Networks, Edmonton, Canada, 2014: 454–457. [8] SEIJO O, FERNÁNDEZ Z, VAL I, et al. SHARP: Towards the integration of time-sensitive communications in legacy LAN/WLAN[C]. 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 2018: 1–7. [9] WANG Peng, LI Hongyan, ZHANG Shun, et al. A novel joint scheduling scheme of earth observation and transmission in satellite networks[C]. 2020 International Conference on Computing, Networking and Communications (ICNC), Big Island, USA, 2020: 774–779. [10] LAY N, OKINO C, ARGUETA A, et al. On-board wireless communications for spacecraft test and operations[C]. 2019 IEEE Aerospace Conference, Big Sky, USA, 2019: 1–16. [11] SANCHEZ-GARRIDO J, APARICIO B, RAMIREZ J G, et al. Implementation of a time-sensitive networking (TSN) Ethernet bus for microlaunchers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(5): 2743–2758. doi: 10.1109/TAES.2021.3061806 [12] CHAINE P J, BOYER M, PAGETTI C, et al. Comparative study of Ethernet technologies for next-generation satellite on-board networks[C]. 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC), San Antonio, USA, 2021: 1–10. [13] DROBCZYK M and LÜBKEN A. Novel wireless protocol architecture for intra-spacecraft wireless sensor networks (inspaWSN)[C]. 2018 6th IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Huntsville, USA, 2018: 89–94. [14] KIM Y, SHIN H, and CHA H. Y-MAC: An energy-efficient multi-channel MAC protocol for dense wireless sensor networks[C]. 2008 International Conference on Information Processing in Sensor Networks (IPSN 2008), St. Louis, USA, 2008: 53–63. [15] ACHARYA U K and KUMAR S. Particle swarm optimization exponential constriction factor (PSO-ECF) based channel equalization[C]. 2019 6th International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 2019: 94–97. [16] CHAARI A, FDHILA R, NEJI B, et al. PSO based data routing in a networked distributed Pico-satellites system[C]. 2012 IEEE First AESS European Conference on Satellite Telecommunications (ESTEL), Rome, Italy, 2012. 1–5. [17] WEI Y H, LENG Quan, HAN Song, et al. RT-WiFi: Real-time high-speed communication protocol for wireless cyber-physical control applications[C]. Proceedings of the 2013 IEEE 34th Real-Time Systems Symposium, Vancouver, Canada, 2013: 140–149. [18] 王晨吉. TDMA自组织网络中低时延动态自适应时隙分配协议研究[D]. [硕士论文], 西安电子科技大学, 2019.WANG Chenji. Research on a low transmission delay dynamic timeslot allocation protocol in TDMA Manet[D]. [Master dissertation], Xidian University, 2019. [19] ZHU Yan, SHENG Min, LI Jiandong, et al. Traffic modeling and performance analysis for remote sensing satellite networks[C]. 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 2018: 1–6. [20] MCMAHON G, SEPTIAWAN R, and SUGDEN S. A multiservice traffic allocation model for LEO satellite communication networks[J]. IEEE Journal on Selected Areas in Communications, 2004, 22(3): 501–507. doi: 10.1109/JSAC.2004.823417 [21] IEEE. IEEE Std 802.11TM-2016 IEEE Standard for Information technology—Telecommunications and information exchange between systems Local and metropolitan area networks—Specific requirements - Part 11: Wireless LAN medium access control (MAC) and physical layer (PHY) specifications[S]. New York: IEEE, 2016. -







图(6) / 表(3)
计量
- 文章访问数: 1051
- HTML全文浏览量: 477
- PDF下载量: 100
- 被引次数: 0
 下载:
下载:
