

Research on Acquisition and Tracking Technology Based on Underwater Continuous Signal
-
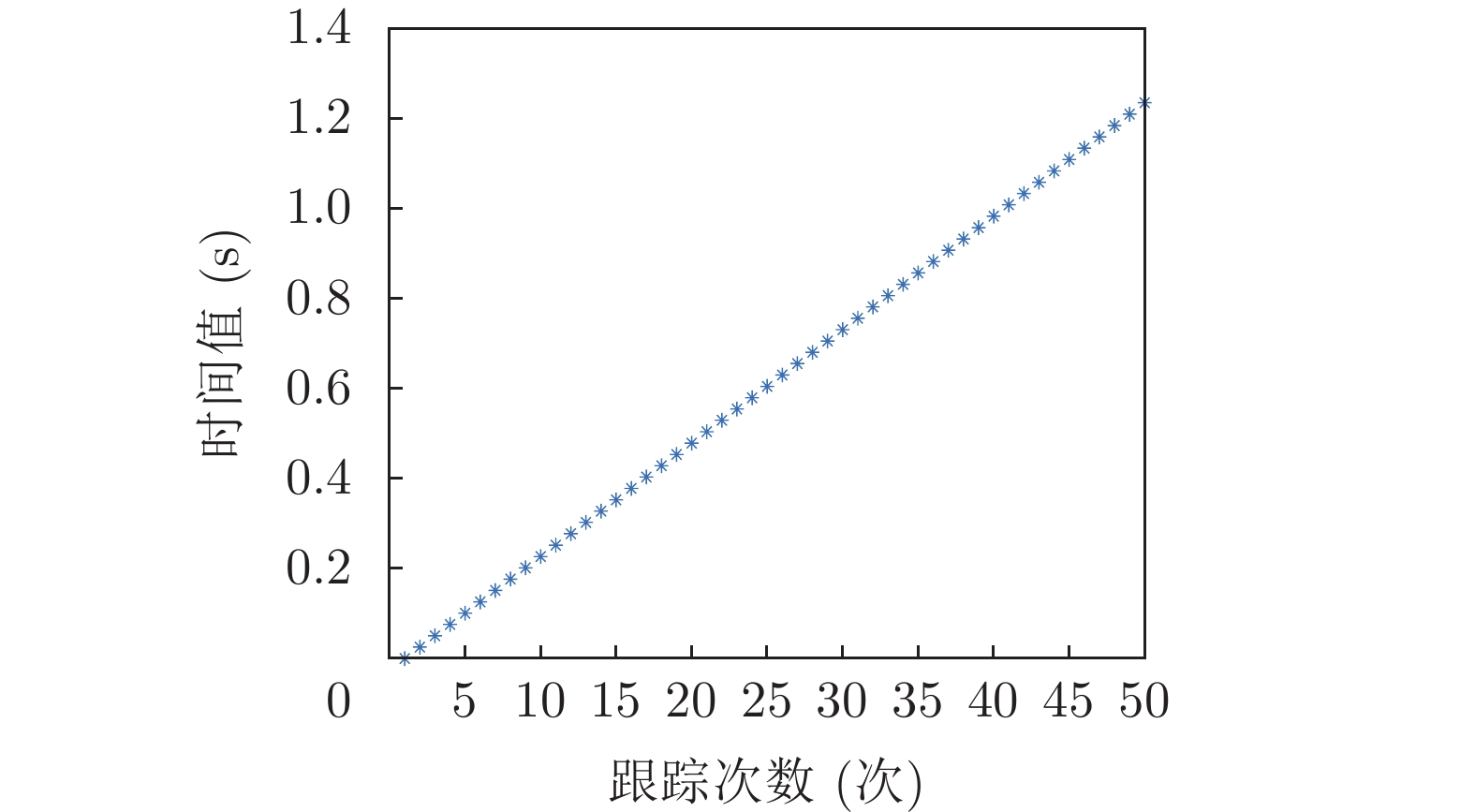
摘要: 针对水下高速潜器回收导引过程中实现实时测量位置与传输指控信息的问题,该文提出基于水下连续波体制的捕获跟踪技术。利用连续波体制实现测距与通信的同步解析,通过并行处理结构压缩数据捕获时长,并基于锁相环原理设计出适应水声环境与高速背景的最佳环路跟踪策略。从理论仿真与松花湖试验结果来看,算法的捕获时间从传统匹配算法的83.87 s缩短至0.66 s,计算量缩小为时域算法的2.36%。信号跟踪技术在匀速模型和加速度模型下都具有良好的性能,从通信角度讲跟踪算法能够准确无误地传输数据,从参数估计角度讲,基于跟踪结果输出的参数估计精度高且随速度变化缓慢,但传统检测精度随速度增大而变差。该方法实现了对多普勒频偏的精确估计与动态调整,保证了声学测量与指控信息传输的连续性与稳定性,对水下高速潜器的实时回收导引具有重要意义。Abstract: Considering the problem of real-time measurement of position and transmission of charge information in the recovery and guidance process of underwater high speed submersible, the acquisition and tracking technology based on the underwater continuous wave system is proposed. Continuous wave system is used to realize synchronous resolution of ranging and communication. The data acquisition time is compressed by parallel processing structure, and the optimal loop tracking strategy suitable for underwater acoustic environment and high dynamic background is designed based on the principle of phase-locked loop. From the theoretical simulation and Songhua Lake test results, the capture time of the algorithm is shortened from 83.87 s of the traditional matching algorithm to 0.66 s, and the calculation amount is reduced to 2.36 % of the time domain algorithm. Signal tracking technology has good performance under both high speed constant speed model and acceleration model. From the perspective of communication, the tracking algorithm can transmit data accurately. From the perspective of parameter estimation, the parameter accuracy based on tracking results changes slowly with the speed, but the traditional detection accuracy decreases with the increase of speed.This method achieves accurate Doppler estimation, and ensures the continuity and stability of ranging and communication. It is of great significance to the real-time recovery guidance of underwater high speed submersible.
-
Key words:
- Underwater signal acquisition /
- Signal tracking /
- High speed /
- Parameter estimation
-
[1] SINGH H, BELLINGHAM J G, HOVER F, et al. Docking for an autonomous ocean sampling network[J]. IEEE Journal of Oceanic Engineering, 2001, 26(4): 498–514. doi: 10.1109/48.972084 [2] REGO F and PASCOAL A. Cooperative single-beacon multiple AUV navigation under stringent communication bandwidth constraints[J]. IFAC-PapersOnLine, 2021, 54(16): 216–223. doi: 10.1016/j.ifacol.2021.10.096 [3] 赵蕊, 许建. 自主式水下航行器水下回收融合引导技术方案及算法[J]. 中国舰船研究, 2022, 17(1): 212–220. doi: 10.19693/j.issn.1673-3185.02318ZHAO Rui and XU Jian. Fusion guiding technology solution and algorithm for Underwater docking of autonomous underwater vehicles[J]. Chinese Journal of Ship Research, 2022, 17(1): 212–220. doi: 10.19693/j.issn.1673-3185.02318 [4] 郑荣, 宋涛, 孙庆刚, 等. 自主式水下机器人水下对接技术综述[J]. 中国舰船研究, 2018, 13(6): 43–49,65. doi: 10.19693/j.issn.1673-3185.01182ZHENG Rong, SONG Tao, SUN Qinggang, et al. Review on underwater docking technology of AUV[J]. Chinese Journal of Ship Research, 2018, 13(6): 43–49,65. doi: 10.19693/j.issn.1673-3185.01182 [5] 刘伯胜, 雷家煜. 水声学原理[M]. 2版. 哈尔滨: 哈尔滨工程大学出版社, 2010: 101–115.LIU Bosheng and LEI Jiayu. Principle of Underwater Acoustics[M]. 2nd ed. Harbin: Harbin Engineering University Press, 2010: 101–115. [6] 赵红光. 试论我国水声信号处理领域的最新进展[J]. 科技创新与应用, 2015(27): 49.ZHAO Hongguang. Research progress of underwater acoustic signal processing in China[J]. Technology Innovation and Application, 2015(27): 49. [7] SHARIF B S, NEASHAM J, HINTON O R, et al. A computationally efficient Doppler compensation system for underwater acoustic communications[J]. IEEE Journal of Oceanic Engineering, 2000, 25(1): 52–61. doi: 10.1109/48.820736 [8] 霍雁明, 殷敬伟, 张晓. 水声通信中多普勒系数估计方法研究[J]. 科技广场, 2012(3): 88–92. doi: 10.3969/j.issn.1671-4792.2012.03.024HUO Yanming, YIN Jingwei, and ZHANG Xiao. Study on Doppler Coeffcients estimate in underwater acoustic communication[J]. Science Mosaic, 2012(3): 88–92. doi: 10.3969/j.issn.1671-4792.2012.03.024 [9] MA Lu, JIA Hanbo, LIU Songzuo, et al. Low-complexity Doppler compensation algorithm for underwater acoustic OFDM systems with nonuniform Doppler shifts[J]. IEEE Communications Letters, 2020, 24(9): 2051–2054. doi: 10.1109/LCOMM.2020.2998293 [10] BHUIYAN M Z H, SODERHOLM S, THOMBRE S, et al. Implementation of a software-defined BeiDou receiver[M]. SUN Jiadong, JIAO Wenhai, WU Haitao, et al. China Satellite Navigation Conference (CSNC) 2014 Proceedings: Volume I. Berlin: Springer, 2014: 751–762. [11] 徐东明, 崔姝, 罗小宏. GPS基带信号处理方法综述[J]. 电光与控制, 2021, 28(10): 55–60. doi: 10.3969/j.issn.1671-637X.2021.10.012XU Dongming, CUI Shu, and LUO Xiaohong. A review on GPS baseband signal processing methods[J]. Electronics Optics &Control, 2021, 28(10): 55–60. doi: 10.3969/j.issn.1671-637X.2021.10.012 [12] 陈涛. GPS接收机基带信号处理的研究和设计[D]. [硕士论文], 上海交通大学, 2009: 69.CHEN Tao. Research and design of GPS receiver baseband processing[D]. [Master dissertation], Shanghai Jiao Tong University, 2009: 69. [13] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2009.XIE Gang. Principles of GPS and Receiver Design[M]. Beijing: Publishing House of Electronics Industry, 2009. [14] JWO D J. Optimisation and sensitivity analysis of GPS receiver tracking loops in dynamic environments[J]. IEE Proceedings-Radar, Sonar and Navigation, 2001, 148(4): 241–250. doi: 10.1049/ip-rsn:20010429 [15] NEZHADSHAHBODAGHI M, MOSAVI M R, and TABATABAEI A. An improved two-step time-parallel semi-bit method for GPS weak signal acquisition[J]. AEU-International Journal of Electronics and Communications, 2020, 121: 153240. doi: 10.1016/j.aeue.2020.153240 [16] KAPLAN E D and HEGARTY C J. Understanding GPS Principles and Applications[M]. 2nd ed. Boston: Artech House, 2006: 224–239. [17] KANG S and LEE Y H. Rapid acquisition of PN signals for DS/SS systems using a phase estimator[J]. IEEE Journal on Selected Areas in Communications, 2001, 19(6): 1128–1137. doi: 10.1109/49.926368 [18] HUANG Wenzhun, ZHANG Shanwen, and YAN R H. Novel spread spectrum communication theory and the anti-jamming applications[C]. 2021 6th International Conference on Inventive Computation Technologies (ICICT). Coimbatore, India: IEEE, 2021: 56–61. [19] TANG Nvzhi, ZENG Qiao, LUO Dongyan, et al. Research on development and application of underwater acoustic communication system[J]. Journal of Physics:Conference Series, 2020, 1617: 012036. doi: 10.1088/1742-6596/1617/1/012036 [20] CARTER G. Time delay estimation for passive sonar signal processing[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1981, 29(3): 463–470. doi: 10.1109/TASSP.1981.1163560 -


 下载:
下载:









图(18)
计量
- 文章访问数: 1092
- HTML全文浏览量: 548
- PDF下载量: 139
- 被引次数: 0
