

Line Spectrum Trajectory Extraction Method of Underwater Acoustic Signal Based on Dynamic Parameter HMM
-
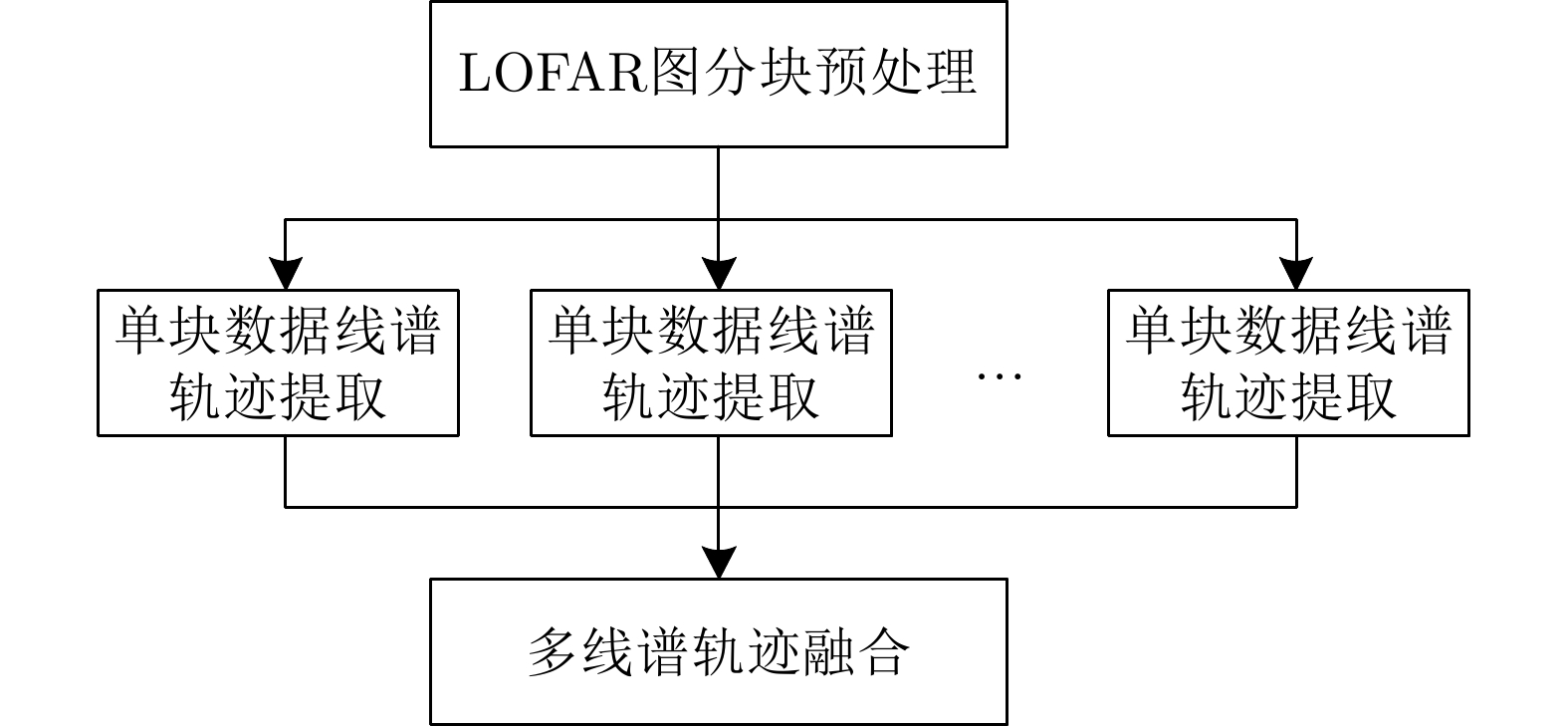
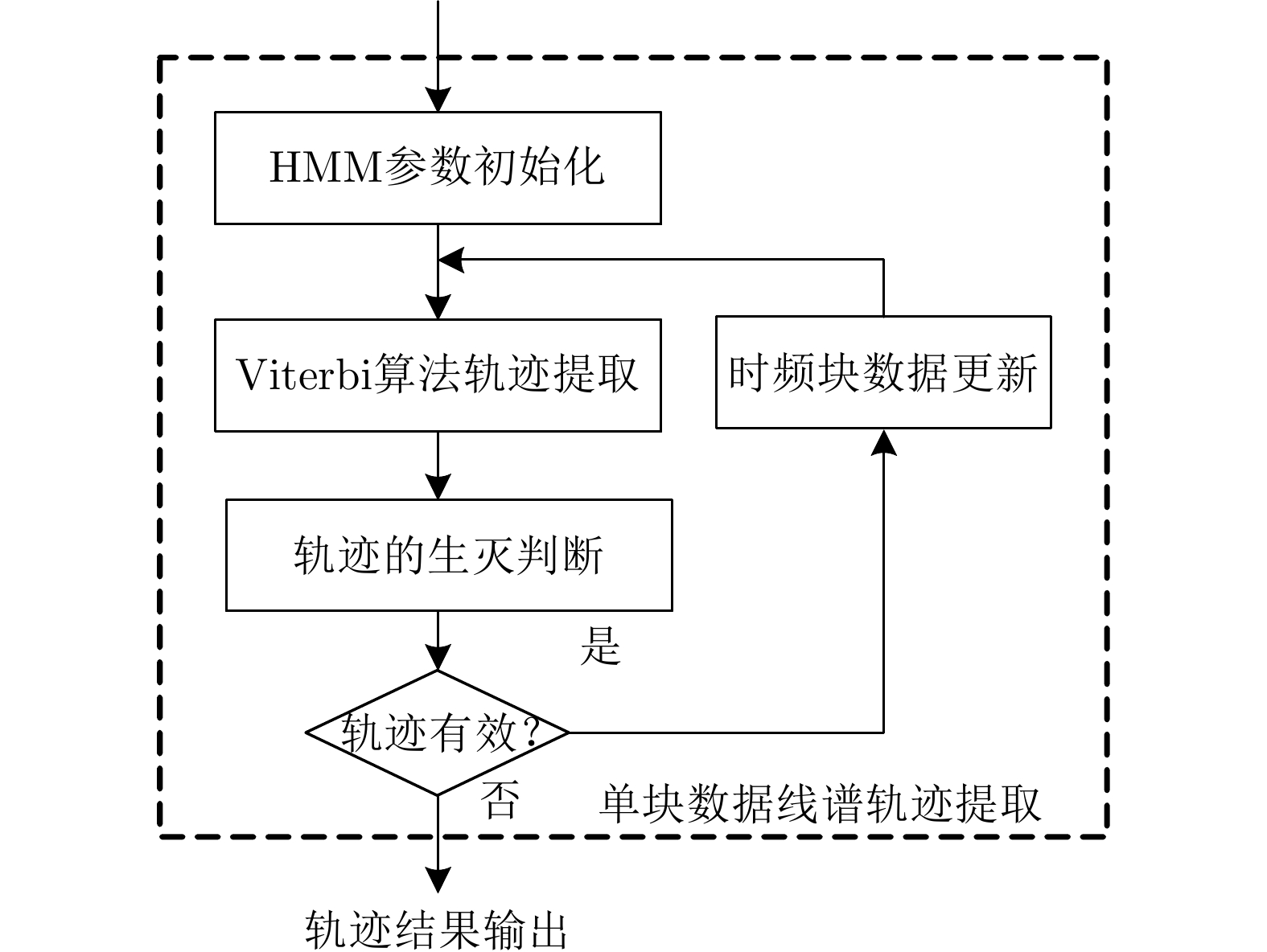
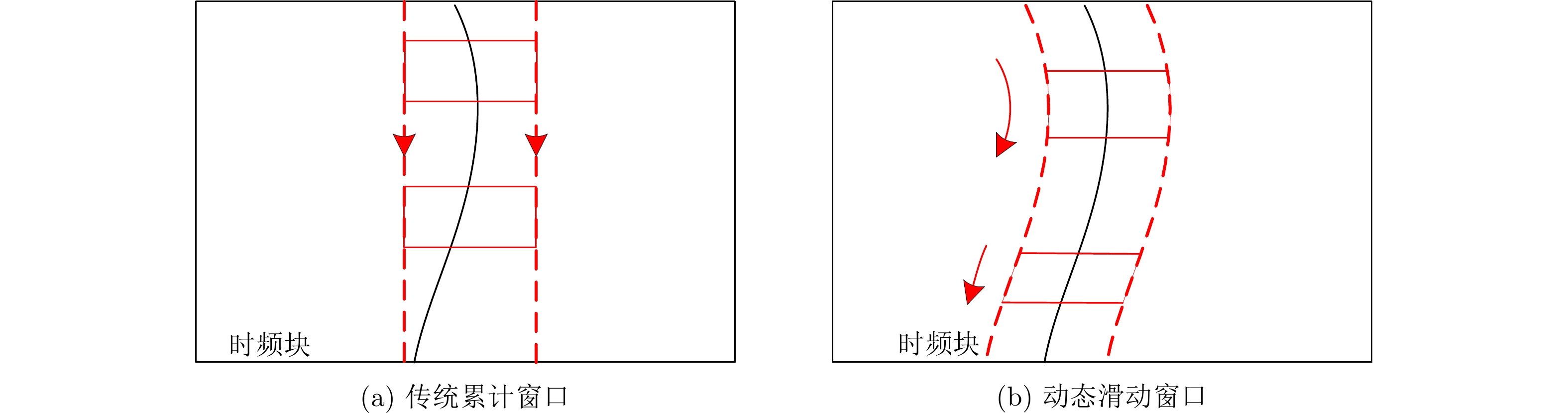
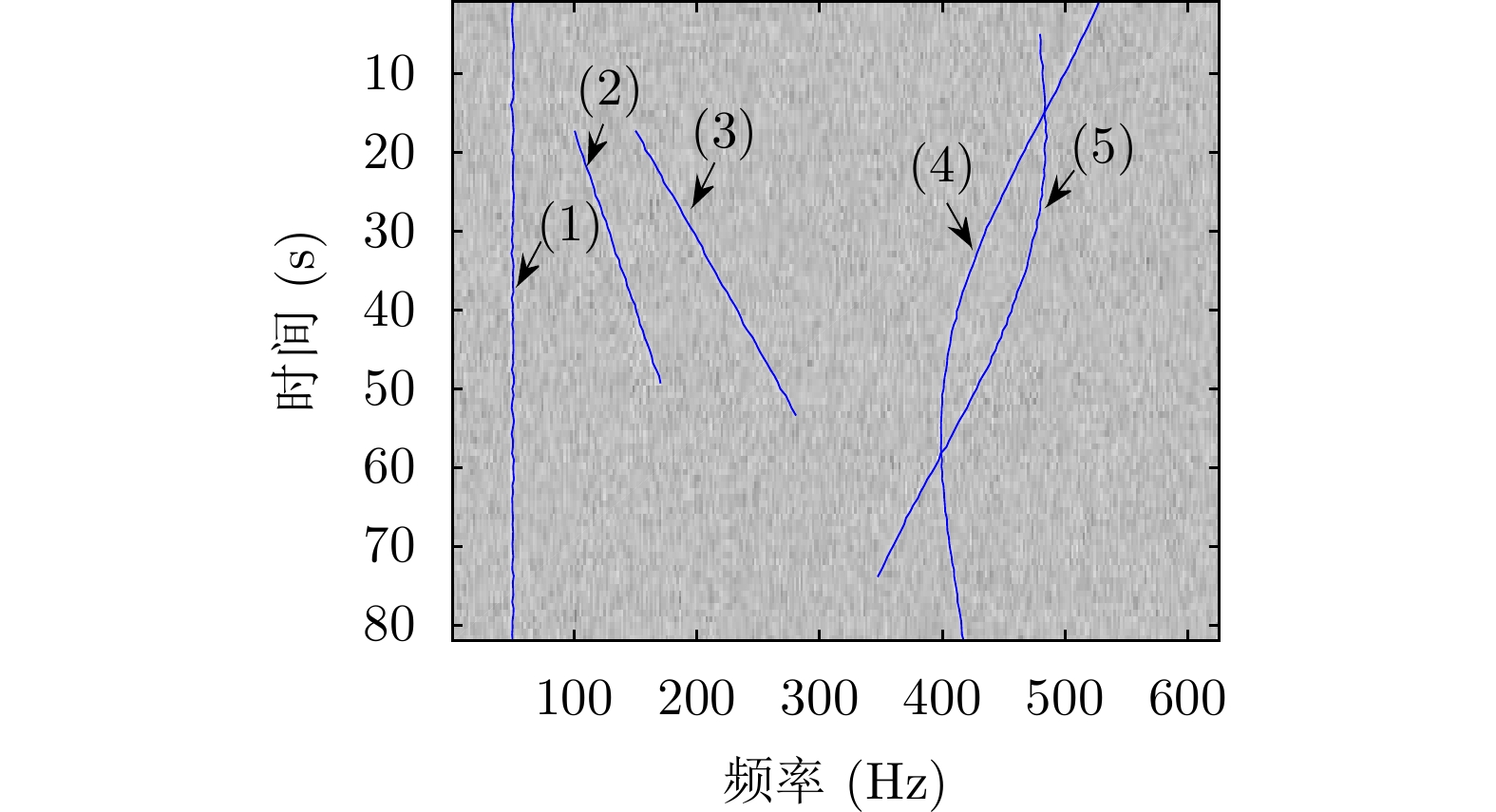
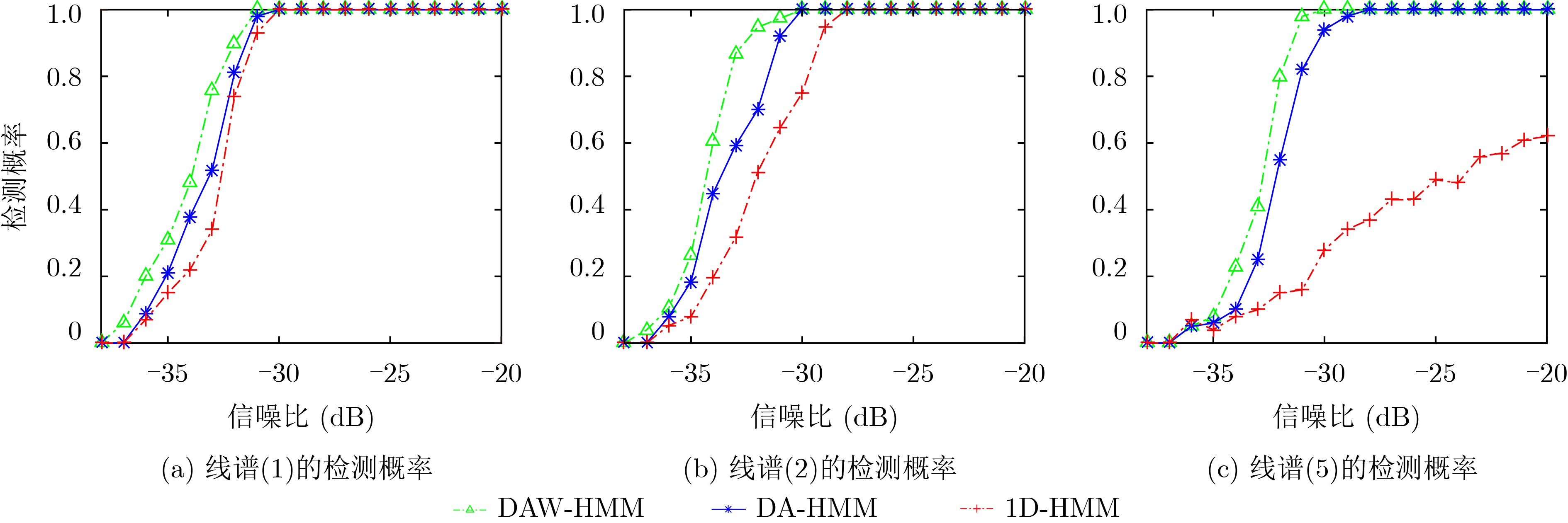
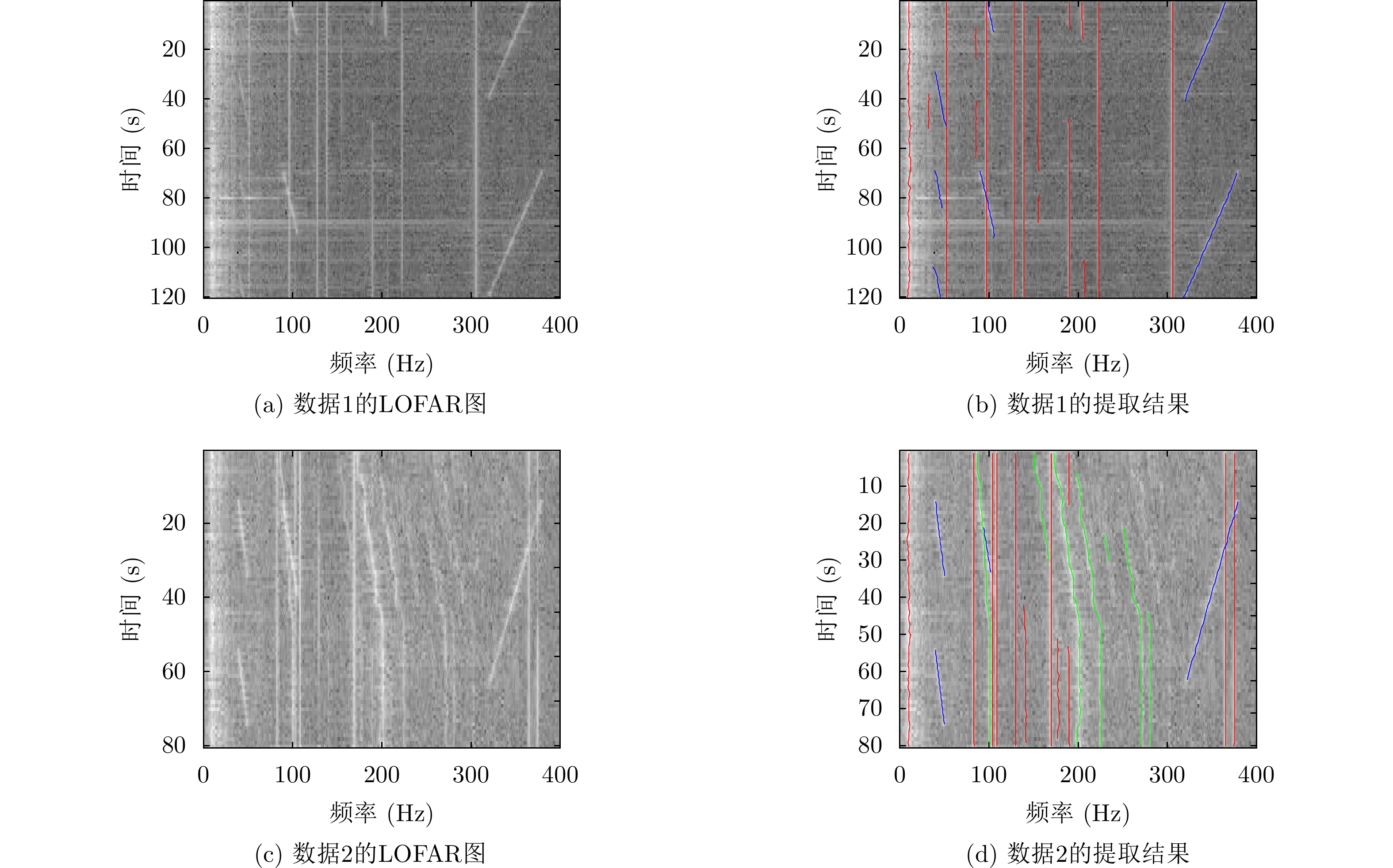
摘要: 针对传统隐马尔可夫模型(HMM)方法提取时变线谱与多线谱的能力较弱以及动态规划过程计算量过大的问题,该文提出一种基于动态参数的1维隐马尔可夫模型(1D-HMM)的方法用于水声信号低频分析与记录(LOFAR)图中的线谱轨迹提取。该方法将时变频率状态建模为1阶马尔可夫过程,利用Viterbi算法循环提取多条线谱轨迹。在动态规划的迭代过程中,通过实时计算序列的1阶导数动态调整HMM中的状态转移概率矩阵,提升了对线谱轨迹的提取能力和多线谱的分辨能力;设计了一种基于动态滑动窗口的功率谱累积方法估计线谱的生灭,剔除虚假的线谱轨迹并判断线谱轨迹提取的结束。同时,该方法在实现过程中设计了对LOFAR图数据的块处理策略,大大减少了计算量。仿真和实际数据的处理结果表明,该方法在低信噪比条件下能够有效地检测和跟踪复杂时变频谱的频率状态,并有较好运行效率,为声呐设备的弱信号检测提供了良好的技术支持。Abstract: In view of the weak ability of traditional Hidden Markov model (HMM) method to extract time-varying line spectrum and multi line spectrum and the large amount of calculation in dynamic programming process, a One- Dimensional Hidden Markov Model (1D-HMM) method based on dynamic parameters is proposed to extract line spectrum trajectory in LOw Frequency Analysis and Recording (LOFAR) diagram of underwater acoustic signal. In this method, the time-varying frequency state is modeled as a first-order Markov process, and the Viterbi algorithm is repeated several times to extract multiple frequency trajectories with the largest a posteriori probability. In the iterative process, the state transition probability matrix in HMM is dynamically adjusted by the first derivative of the sequence calculated in real time, which improves the extraction ability of line spectrum trajectory and the resolution ability of multi line spectrum; A power spectrum accumulation method based on dynamic sliding window is designed to estimate the birth and death of line spectrum and eliminate false line spectrum trajectories. At the same time, the block processing strategy is designed for LOFAR graph data in the implementation process, which reduces greatly the amount of calculation. The simulation and actual data processing results show that the method can effectively detect and track the frequency state of complex time-varying spectrum with good operational efficiency under low signal-to-noise ratio conditions, which provides good technical support for the detection of weak signals in sonar devices.
-
表 1 不同方法的处理时间和PD, PF
方法 时间 (s) PD (%) PF (%) 1D-HMM 13.248 64.05 43.31 1DW-HMM 12.546 70.27 17.41 DA-HMM 16.524 100 10.65 DAW-HMM 14.129 100 1.85 2D-HMM 485.98 100 10.76 2DW-HMM 483.48 100 1.85  下载: 导出CSV
下载: 导出CSV
-
[1] 方世良, 杜栓平, 罗昕炜, 等. 水声目标特征分析与识别技术[J]. 中国科学院院刊, 2019, 34(3): 297–305. doi: 10.16418/j.issn.1000-3045.2019.03.007FANG Shiliang, DU Shuanping, LUO Xinwei, et al. Development of underwater acoustic target feature analysis and recognition technology[J]. Bulletin of the Chinese Academy of Sciences, 2019, 34(3): 297–305. doi: 10.16418/j.issn.1000-3045.2019.03.007 [2] 马凯, 蔡昱明, 王易川, 等. 基于噪声抑制门的两级自适应线谱增强算法[J]. 电子与信息学报, 2021, 43(3): 773–780. doi: 10.11999/JEIT200540MA Kai, CAI Yuming, WANG Yichuan, et al. An algorithm of two-level adaptive line-spectrum enhancement based on noise suppression gate[J]. Journal of Electronics &Information Technology, 2021, 43(3): 773–780. doi: 10.11999/JEIT200540 [3] 王学成, 王鲁军, 洪常委. 一种基于DOA分布信息熵加权的线谱目标检测方法[J]. 声学技术, 2021, 40(1): 117–122. doi: 10.16300/j.cnki.1000-3630.2021.01.018WANG Xuecheng, WANG Lujun, and HONG Changwei. A linear spectrum target detection method based on DOA distribution information entropy weighting[J]. Technical Acoustics, 2021, 40(1): 117–122. doi: 10.16300/j.cnki.1000-3630.2021.01.018 [4] PARIS S and JAUFFRET C. Frequency line tracking using HMM-based schemes [passive sonar][J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(2): 439–449. doi: 10.1109/TAES.2003.1207256 [5] SONG T L, KIM H W, and MUSICKI D. Iterative joint integrated probabilistic data association for multitarget tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1): 642–653. doi: 10.1109/TAES.2014.130571 [6] PULFORD G W and LA SCALA B F. Multihypothesis viterbi data association: Algorithm development and assessment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(2): 583–609. doi: 10.1109/TAES.2010.5461643 [7] KIM C, LI Fuxin, CIPTADI A, et al. Multiple hypothesis tracking revisited[C]. 2015 IEEE International Conference on Computer Vision, Santiago, Chile, 2015: 4696–4704. [8] STREIT R L and BARRETT R F. Frequency line tracking using hidden Markov models[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1990, 38(4): 586–598. doi: 10.1109/29.52700 [9] BARRETT R F and HOLDSWORTH D A. Frequency tracking using hidden Markov models with amplitude and phase information[J]. IEEE Transactions on Signal Processing, 1993, 41(10): 2965–2976. doi: 10.1109/78.277803 [10] XIE X and EVANS R J. Multiple target tracking and multiple frequency line tracking using hidden Markov models[J]. IEEE Transactions on Signal Processing, 1991, 39(12): 2659–2676. doi: 10.1109/78.107416 [11] XIIE X and EVANS R J. Multiple frequency line tracking with hidden Markov models - further results[J]. IEEE Transactions on Signal Processing, 1993, 41(1): 334. doi: 10.1109/TSP.1993.193150 [12] XIANYA X and EVANS R J. Multiple frequency line tracking using hidden Markov/A models[C]. The 29th IEEE Conference on Decision and Control, Honolulu, USA, 1990: 847–852. [13] XIE Xianya, ZHU Qiang, and LI Huangrun. Some improvements in the HMM based multiple frequency line tracking algorithms[C]. Proceedings of the Third International Conference on Signal Processing, Beijing, China, 1996: 229–232. [14] VAN CAPPEL D and ALINAT P. Frequency line extractor using multiple hidden Markov models[C]. IEEE Oceanic Engineering Society. OCEANS'98. Conference Proceedings, Nice, France, 1998: 1481–1485. [15] PARIS S and JAUFFRET C. A new tracker for multiple frequency line[C]. 2001 IEEE Aerospace Conference Proceedings, Big Sky, USA, 2001: 4/1771–4/1782. [16] PULFORD G and TYSON K. A high performance 1-D hidden Markov model tracker for passive sonar systems[C]. Undersea Defence Technology, Rotterdam, Netherlands, 2015. [17] LUO Xinwei and SHEN Zihan. A sensing and tracking algorithm for multiple frequency line components in underwater acoustic signals[J]. Sensors, 2019, 19(22): 4866. doi: 10.3390/s19224866 [18] LUO Xinwei and SHEN Zihan. A space-frequency joint detection and tracking method for line-spectrum components of underwater acoustic signals[J]. Applied Acoustics, 2021, 172: 107609. doi: 10.1016/j.apacoust.2020.107609 [19] 吴毅斌, 翟春平, 张宇, 等. 基于隐马尔可夫模型的舰船水下噪声评估方法[J]. 舰船科学技术, 2019, 41(9): 121–124. doi: 10.3404/j.issn.1672-7649.2019.09.023WU Yibin, ZHAI Chunping, ZHANG Yu, et al. Evaluation method of ship’s underwater noise based on HMM[J]. Ship Science and Technology, 2019, 41(9): 121–124. doi: 10.3404/j.issn.1672-7649.2019.09.023 [20] ABEL J S, LEE H J, and LOWELL A P. An image processing approach to frequency tracking (application to sonar data)[C]. 1992 IEEE International Conference on Acoustics, Speech, and Signal Processing, San Francisco, USA, 1992: 561–564. -

 下载:
下载:



图(8) / 表(1)
计量
- 文章访问数: 1609
- HTML全文浏览量: 1171
- PDF下载量: 174
- 被引次数: 0
