

Energy-efficient Predictive Deployment Strategy of UAVs Based on ConvLSTM with Attention Mechanism
-
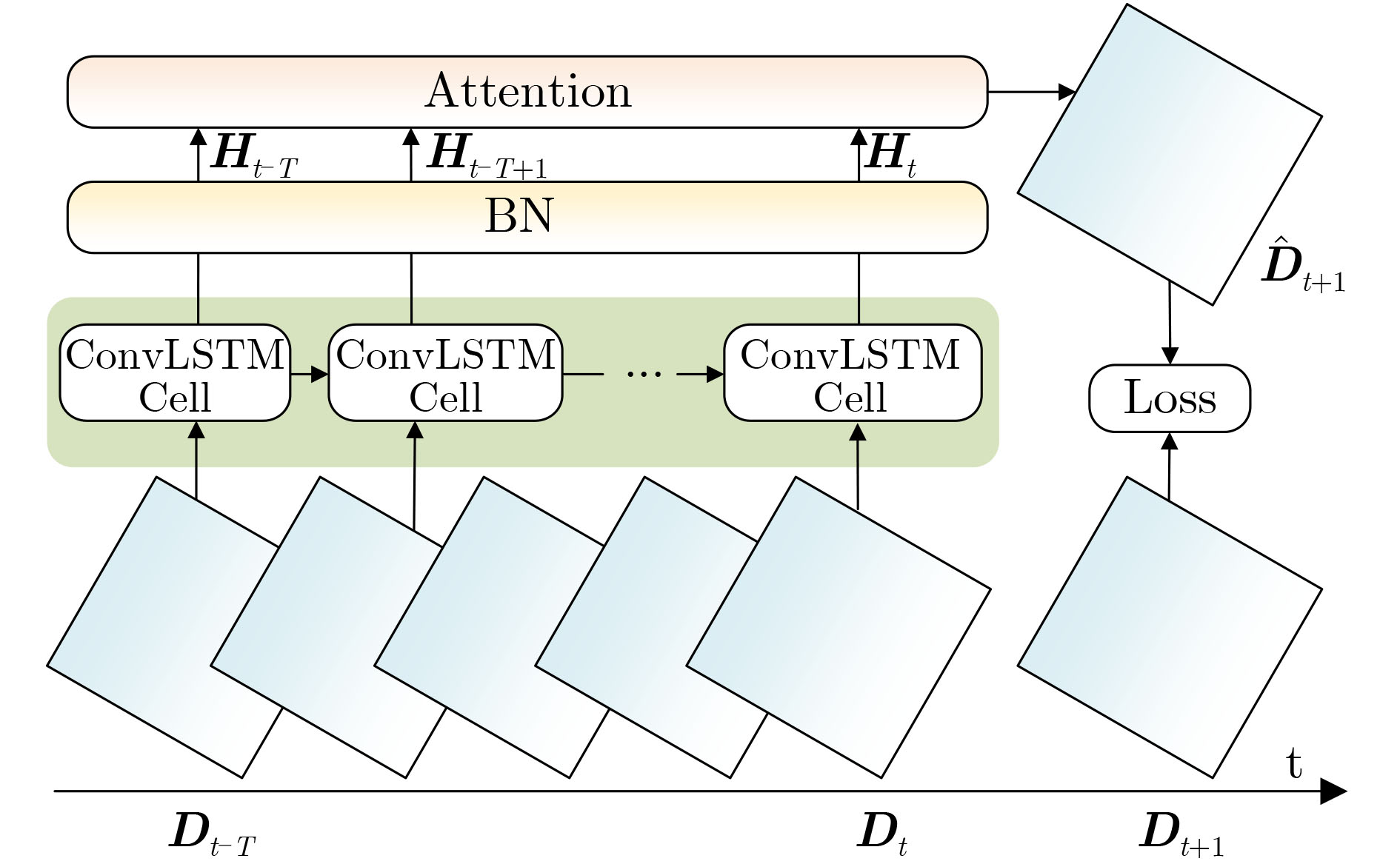
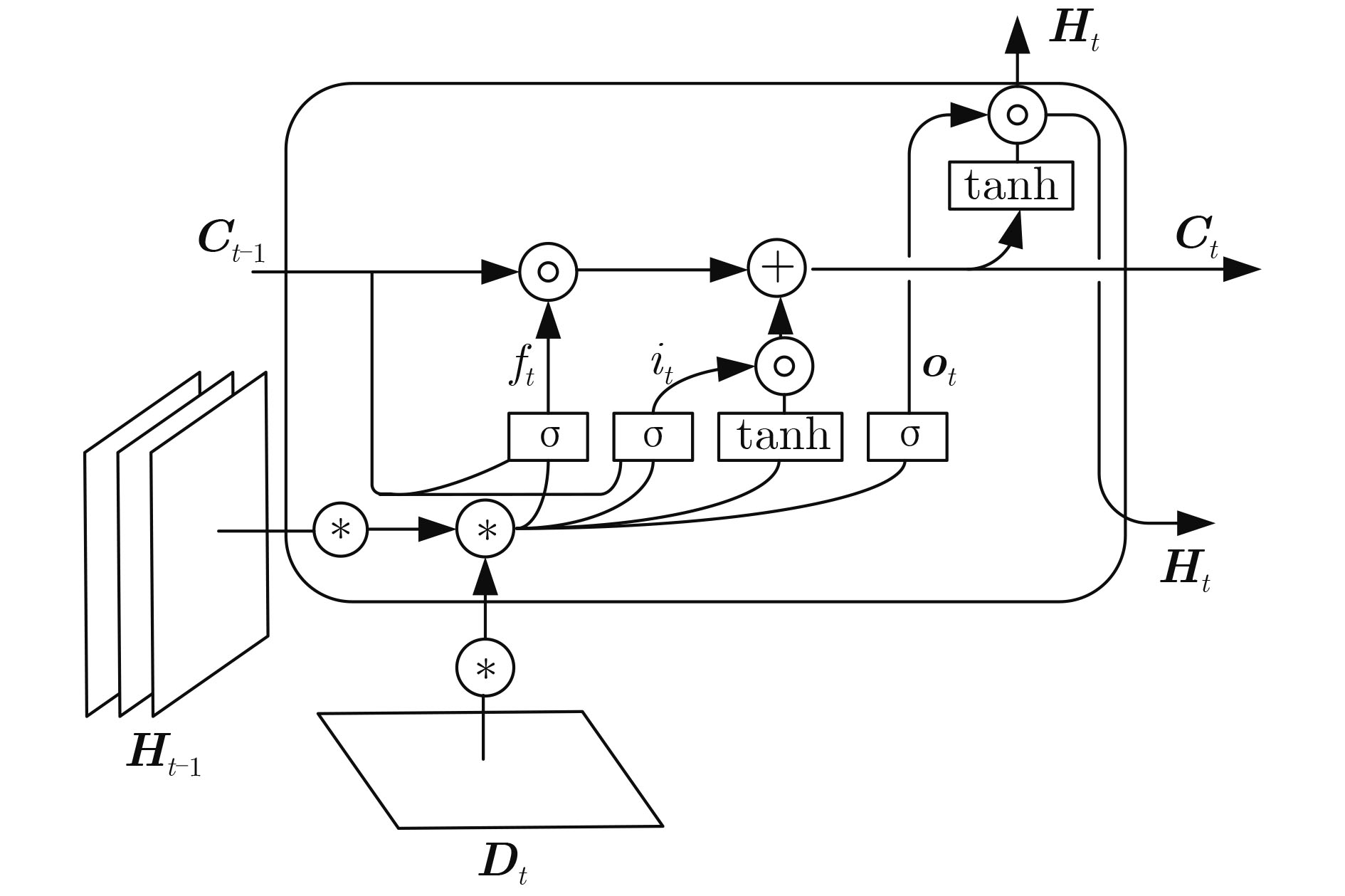
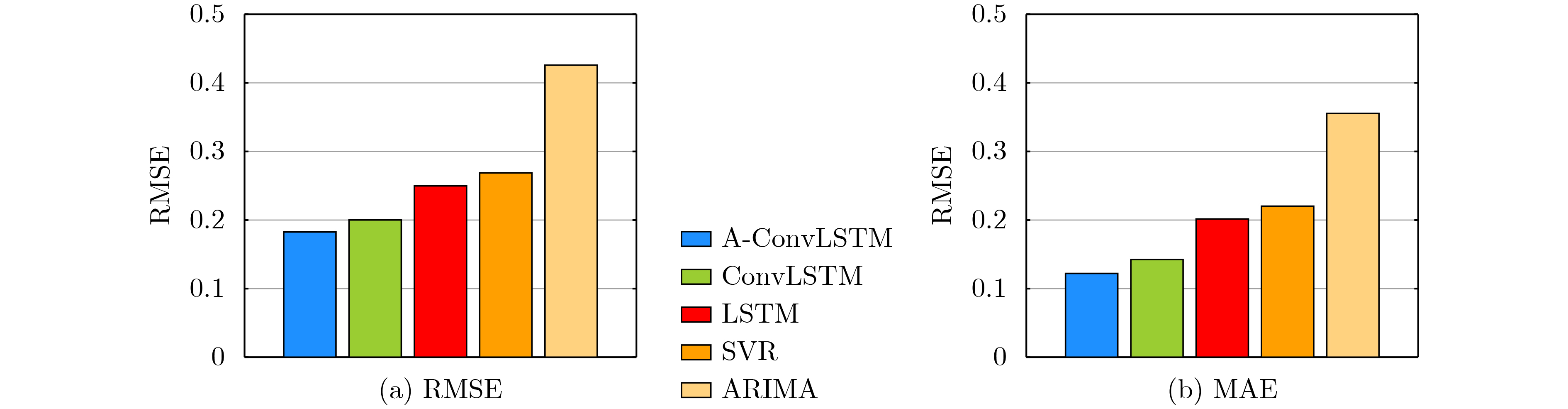
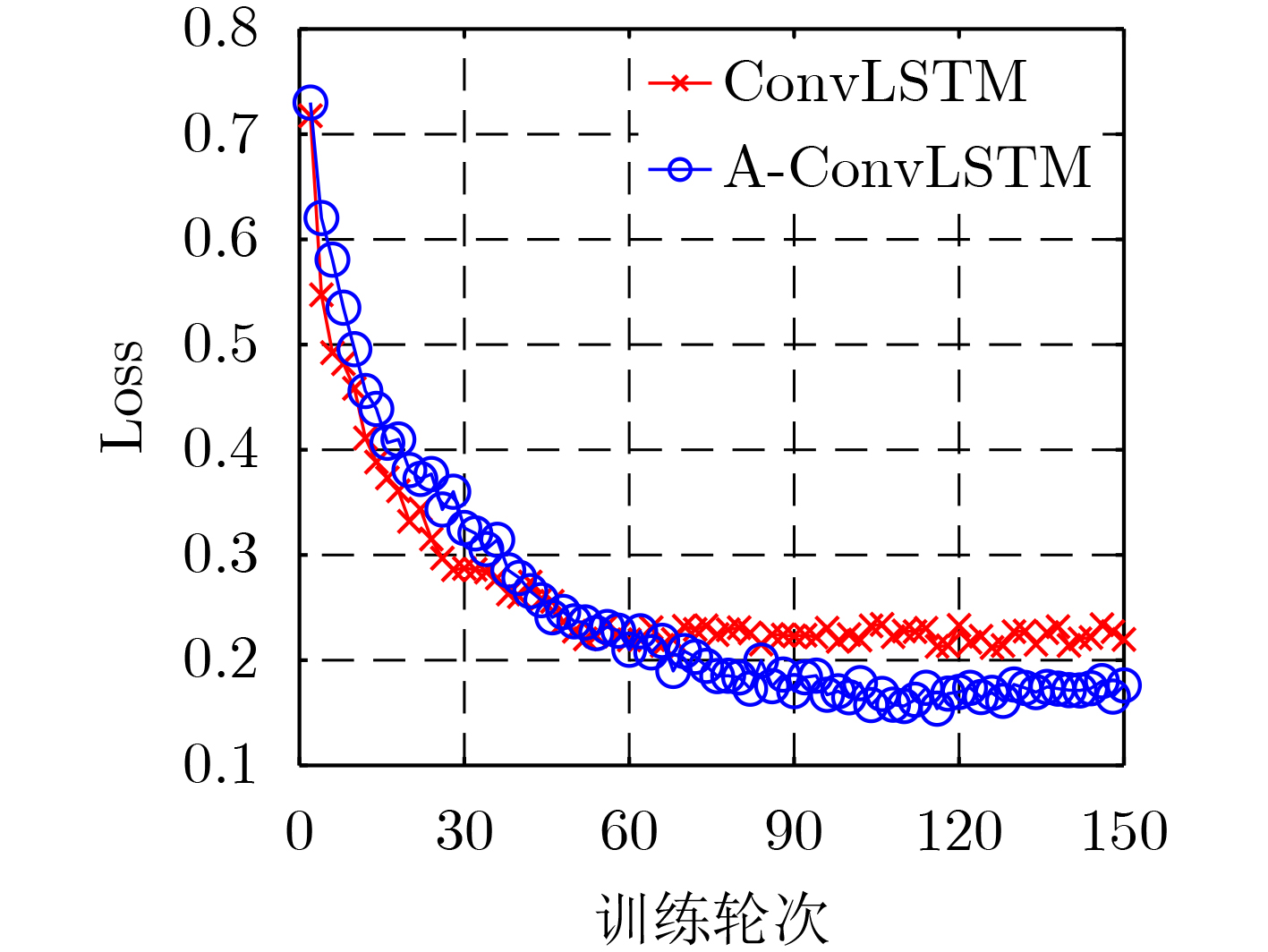
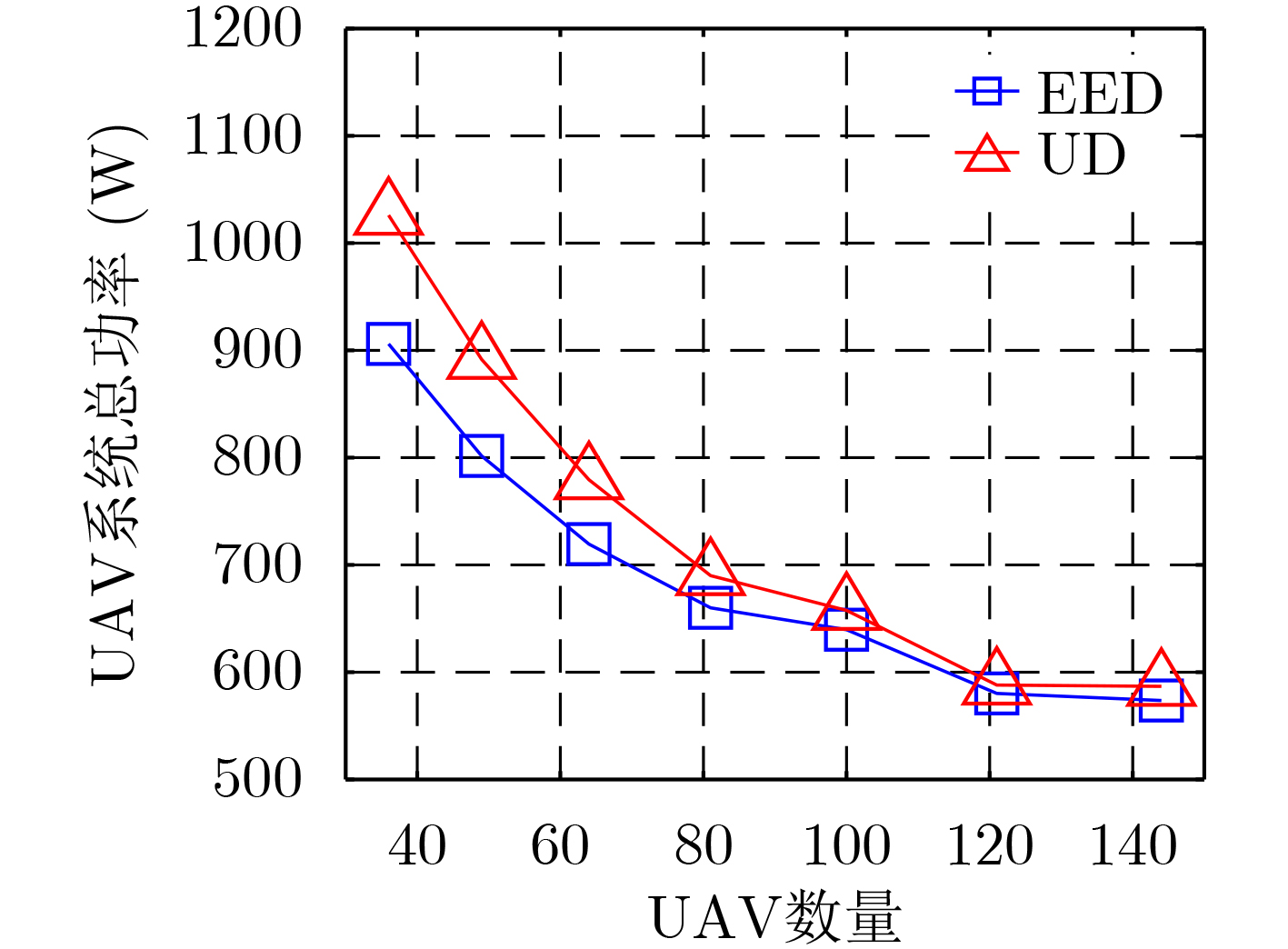
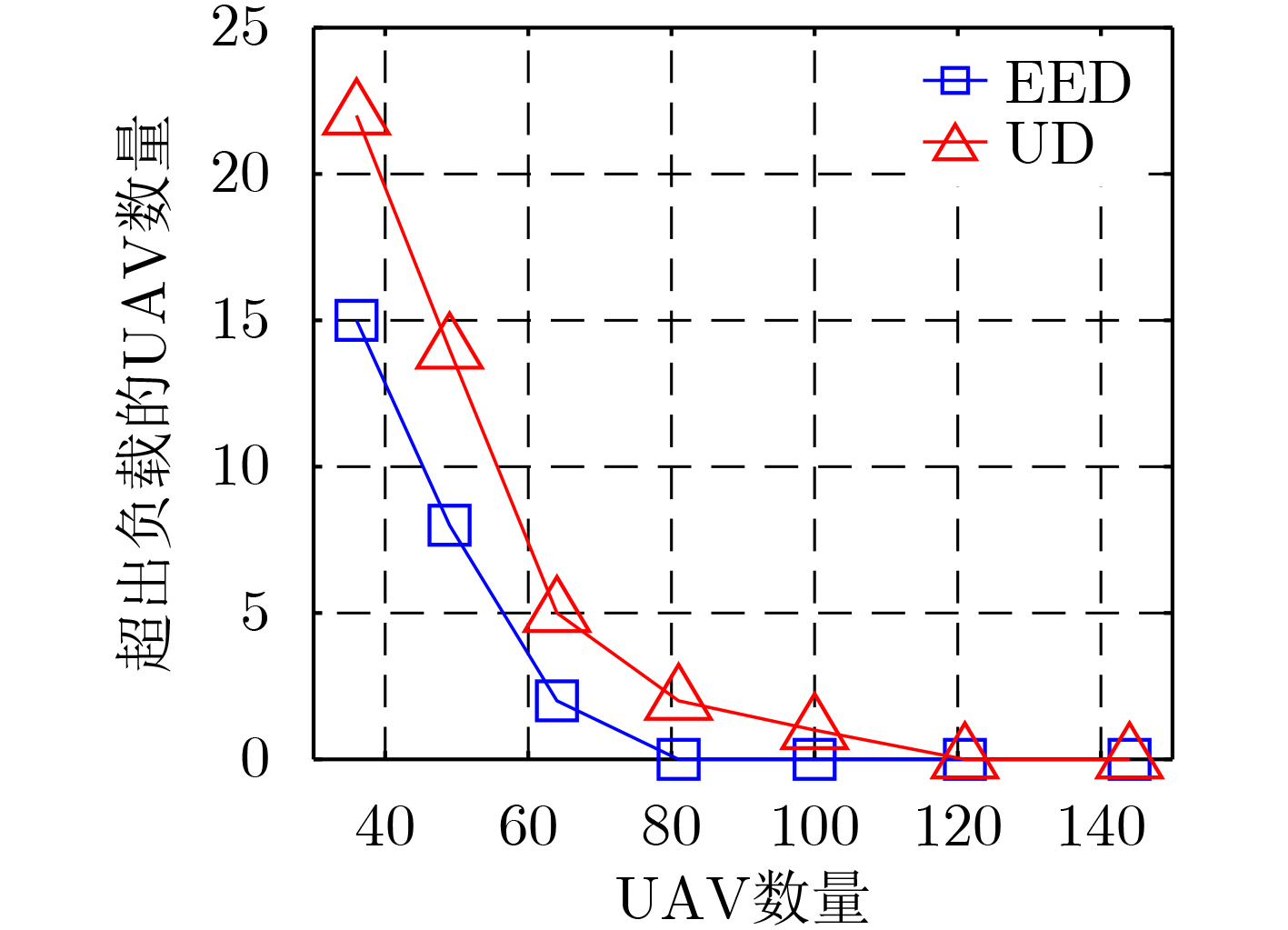
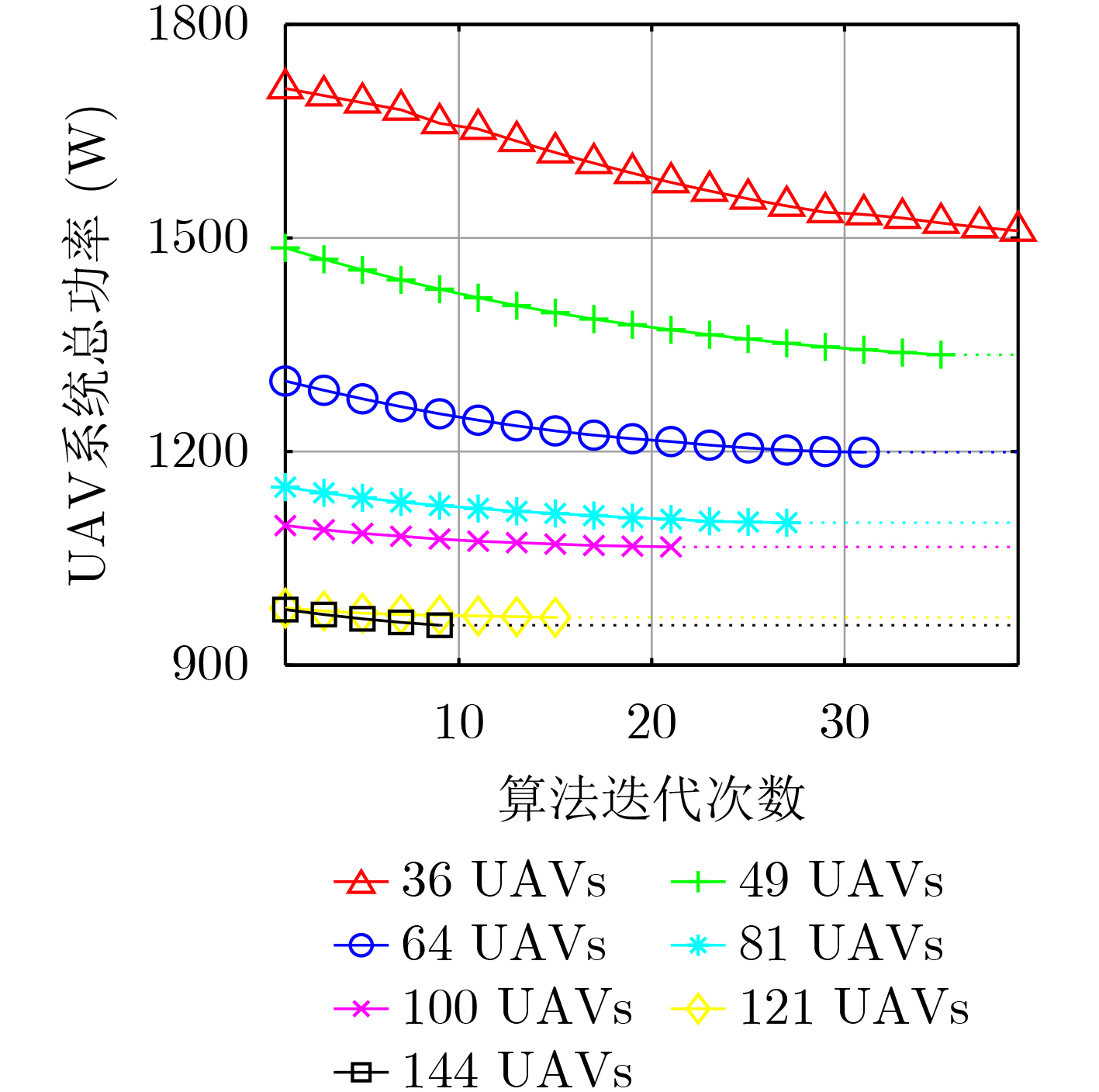
摘要: 无人机(UAV)可以作为空中基站而凭借其移动性灵活地实现热点区域的覆盖。如何预测流量的分布而优化UAV部署是运营商面临的挑战。针对此问题,该文提出一种基于注意力机制卷积长短期记忆网络(A-ConvLSTM)的UAV节能预部署策略:提出一种融合注意力机制的卷积长短期记忆深度时空网络模型A-ConvLSTM,用于预测用户与流量的时空分布;基于预测结果优化UAV的覆盖和位置,在满足用户接入速率要求的前提下,以最小化UAV系统发射功率为目标建立优化模型,将目标问题解耦成两个子问题并提出一种节能部署算法迭代求解。实验结果表明A-ConvLSTM性能高于各基线模型;节能部署算法能够有效降低UAV系统发射功耗,并能以更少数量的UAV实现整体区域覆盖。Abstract: Unmanned Aerial Vehicle (UAV) can be used as the air base station to cover flexibly hotspots by its mobility. However, it is challenging for the network operators to forecast the distribution of network traffic and optimize the deployment of UAVs. To solve this problem, an energy-efficient predictive deployment strategy of UAVs based on ConvLSTM with Attention mechanism (A-ConvLSTM) is proposed: a convolutional long short term memory deep spatio-temporal network model A-ConvLSTM with attention mechanism is proposed to forecast the spatio-temporal distribution of users and cellular traffic. Then based on the forecast, the coverage and locations of UAVs are optimized. On the premise of meeting the requirements of user access rate, an optimization formulation is established with the goal of minimizing the transmission power of UAVs. The formulation is decoupled into two subproblems and an energy-efficient deployment algorithm is proposed for iterative solution. The experimental results show that the performance of A-ConvLSTM is better than that of each baseline model. Energy-efficient deployment algorithm can effectively reduce the transmission power consumption of UAVs, and achieve the overall area coverage with fewer UAVs.
-
表 1 EED算法
输入:区域A各个AoI的预测流量$ {\hat U_i} $及用户数$ {\hat M_i} $ 输出:每个UAV的关联AoI${{\boldsymbol{\mu}} }$及位置$ (x_j^ * ,y_j^ * ,{h_j}) $ (1) 固定UAV的数量,迭代次数k=1,随机选取每个UAV的初始
位置$ {({x_j},{y_j},{h_j})_1} $,(2) while 当P1且P2的解都严格单调递减时: (3) 基于$ {({x_j},{y_j},{h_j})_k} $,利用拉格朗日对偶和次梯度法求
解P1,得到当前每个UAV的最佳关联AoI${ {{\boldsymbol{\mu}} }_k}$(4) 基于${ {{\boldsymbol{\mu}} }_k}$,根据式(25)得到每个无人机的最佳位置
$ {(x_j^ * ,y_j^ * ,{h_j})_{k + 1}} $(5) k=k+1 (6) end while (7) for $ j \in {\mathcal{J}} $ do (8) if 约束条件式(16b)或式(16c)不成立 (9) 增加UAV数量J (10) 跳转至步骤(1) (11) end for  下载: 导出CSV
下载: 导出CSV
-
[1] SAAD W, BENNIS M, and CHEN Mingzhe. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems[J]. IEEE Network, 2020, 34(3): 134–142. doi: 10.1109/MNET.001.1900287 [2] MOZAFFARI M, SAAD W, BENNIS M, et al. Wireless communication using Unmanned Aerial Vehicles (UAVs): Optimal transport theory for hover time optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(12): 8052–8066. doi: 10.1109/TWC.2017.2756644 [3] ZENG Yong and ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(6): 3747–3760. doi: 10.1109/TWC.2017.2688328 [4] LIU C H, CHEN Zheyu, TANG Jian, et al. Energy-Efficient UAV control for effective and fair communication coverage: A deep reinforcement learning approach[J]. IEEE Journal on Selected Areas in Communications, 2018, 36(9): 2059–2070. doi: 10.1109/JSAC.2018.2864373 [5] WANG Zhe, DUAN Lingjie, and ZHANG Rui. Traffic-aware adaptive deployment for UAV-aided communication networks[C]. 2018 IEEE Global Communications Conference, Abu Dhabi, United Arab Emirates, 2018: 1–6. [6] 张凤荔, 赵永亮, 王丹, 等. 基于流量特征的网络流量预测研究[J]. 计算机科学, 2014, 41(4): 86–89,98. doi: 10.3969/j.issn.1002-137X.2014.04.019ZHANG Fengli, ZHAO Yongliang, WANG Dan, et al. Prediction of network traffic based on traffic characteristics[J]. Computer Science, 2014, 41(4): 86–89,98. doi: 10.3969/j.issn.1002-137X.2014.04.019 [7] RAHMAN M S. Characterizing and predicting individual traffic usage of mobile application in cellular network[J]. Computing Reviews, 2019, 60(4): 181. [8] SAPANKEVYCH N I and SANKAR R. Time series prediction using support vector machines: A survey[J]. IEEE Computational Intelligence Magazine, 2009, 4(2): 24–38. doi: 10.1109/MCI.2009.932254 [9] HONG W C, DONG Yucheng, ZHENG Feifeng, et al. Hybrid evolutionary algorithms in a SVR traffic flow forecasting model[J]. Applied Mathematics and Computation, 2011, 217(15): 6733–6747. doi: 10.1016/j.amc.2011.01.073 [10] XU Yue, YIN Feng, XU Wenjun, et al. Wireless traffic prediction with scalable Gaussian process: Framework, algorithms, and verification[J]. IEEE Journal on Selected Areas in Communications, 2019, 37(6): 1291–1306. doi: 10.1109/JSAC.2019.2904330 [11] 陈晓天, 刘静娴. 改进的基于小波变换和FARIMA模型的网络流量预测算法[J]. 通信学报, 2011, 32(4): 153–157,165. doi: 10.3969/j.issn.1000-436X.2011.04.019CHEN Xiaotian and LIU Jingxian. Network traffic prediction based on wavelet transformation and FARIMA[J]. Journal on Communications, 2011, 32(4): 153–157,165. doi: 10.3969/j.issn.1000-436X.2011.04.019 [12] FAN Jianyong, MU Dejun, and LIU Yang. Research on network traffic prediction model based on neural network[C]. 2019 2nd International Conference on Information Systems and Computer Aided Education, Dalian, China, 2019: 554–557. [13] NIE Laisen, JIANG Dingde, YU Shui, et al. Network traffic prediction based on deep belief network in wireless mesh backbone networks[C]. 2017 IEEE Wireless Communications and Networking Conference, San Francisco, USA, 2017: 1–5. [14] CHEN Xiaming, JIN Yaohui, QIANG Siwei, et al. Analyzing and modeling spatio-temporal dependence of cellular traffic at city scale[C]. 2015 IEEE International Conference on Communications, London, UK, 2015: 3585–3591. [15] SHI Xingjian, CHEN Zhourong, WANG Hao, et al. Convolutional LSTM network: A machine learning approach for precipitation nowcasting[C]. The 28th International Conference on Neural Information Processing Systems, Montreal, Canada, 2015: 802–810. [16] BAHDANAU D, CHO K, and BENGIO Y. Neural machine translation by jointly learning to align and translate[C]. The 3rd International Conference on Learning Representations, San Diego, USA, 2015: 1–15. [17] 孙小玲, 李端. 整数规划[M]. 北京: 科学出版社, 2010: 122–125.SUN Xiaoling and LI Duan. Integer Programming[M]. Beijing: Science Press, 2010: 122–125. [18] ZHANG Qianqian, SAAD W, BENNIS M, et al. Predictive deployment of UAV base stations in wireless networks: Machine learning meets contract theory[J]. IEEE Transactions on Wireless Communications, 2021, 20(1): 637–652. doi: 10.1109/TWC.2020.3027624 -


 下载:
下载:



图(9) / 表(1)
计量
- 文章访问数: 1009
- HTML全文浏览量: 1225
- PDF下载量: 131
- 被引次数: 0
