

Performance Analysis of Unmanned Aerial Vehicle Swarms Air-to-ground Networking under Distance-constrained Clustering Strategy
-
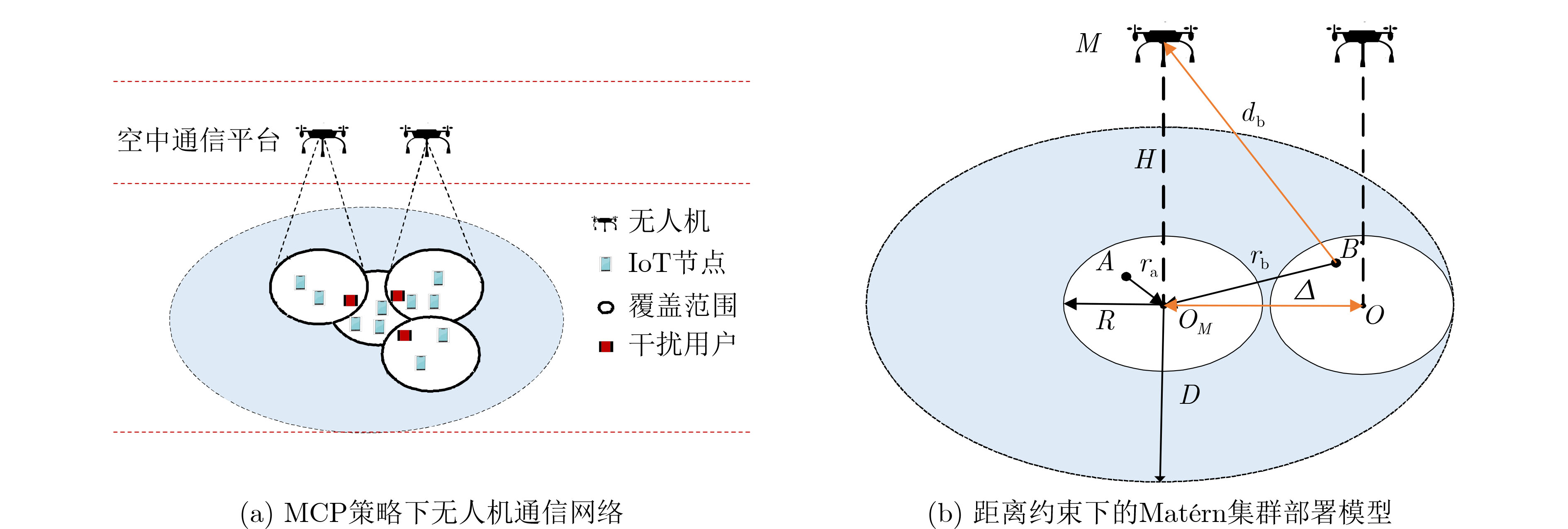
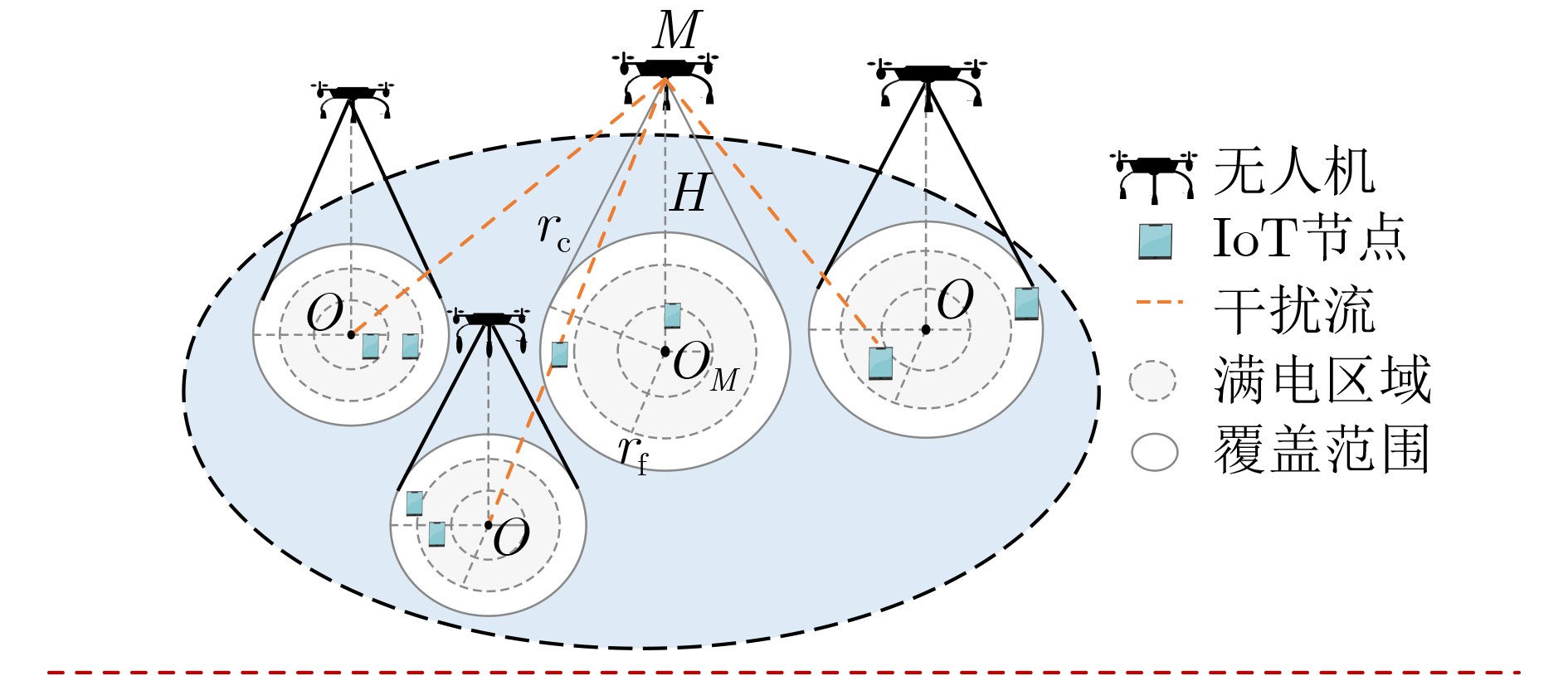
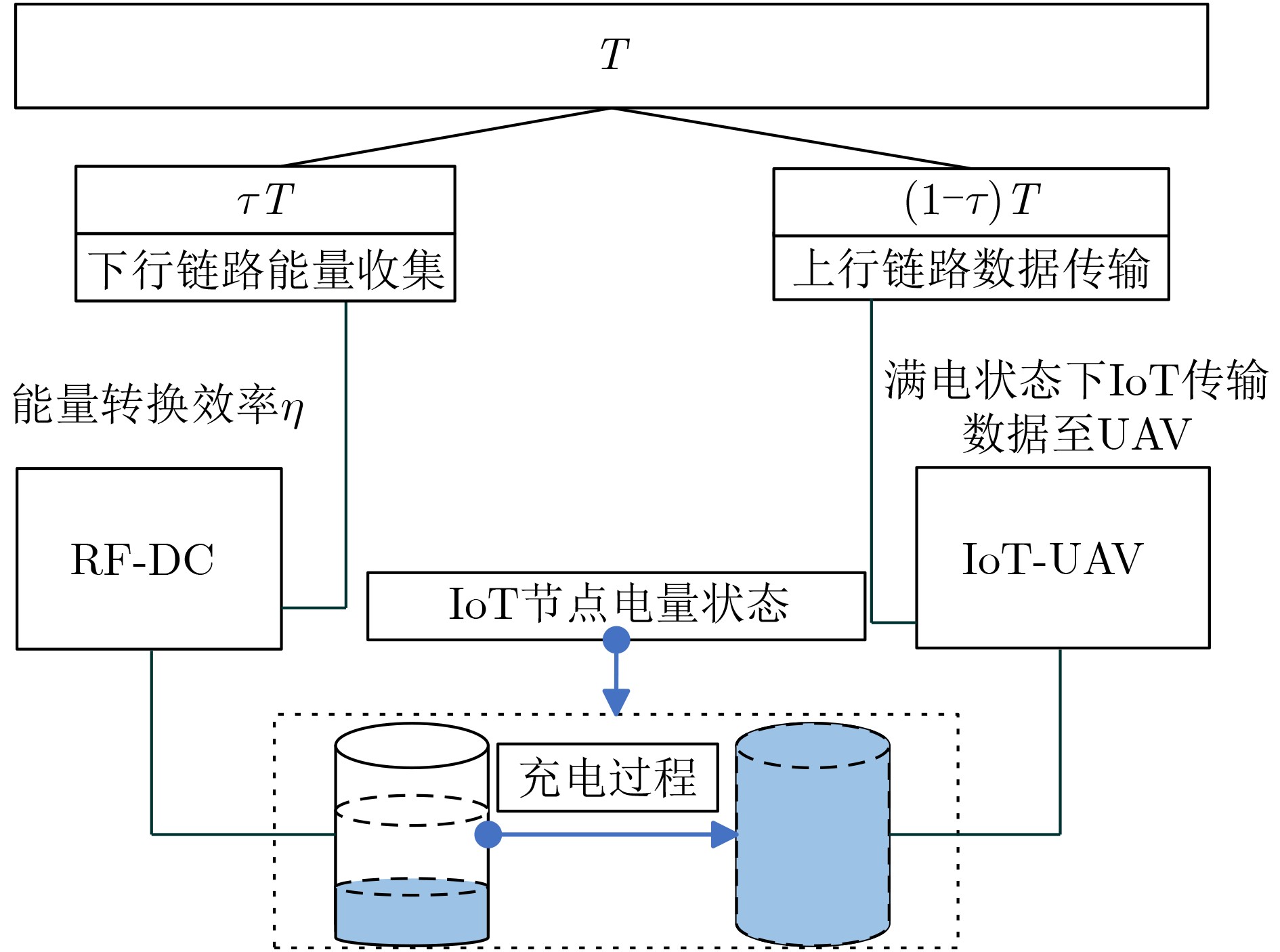
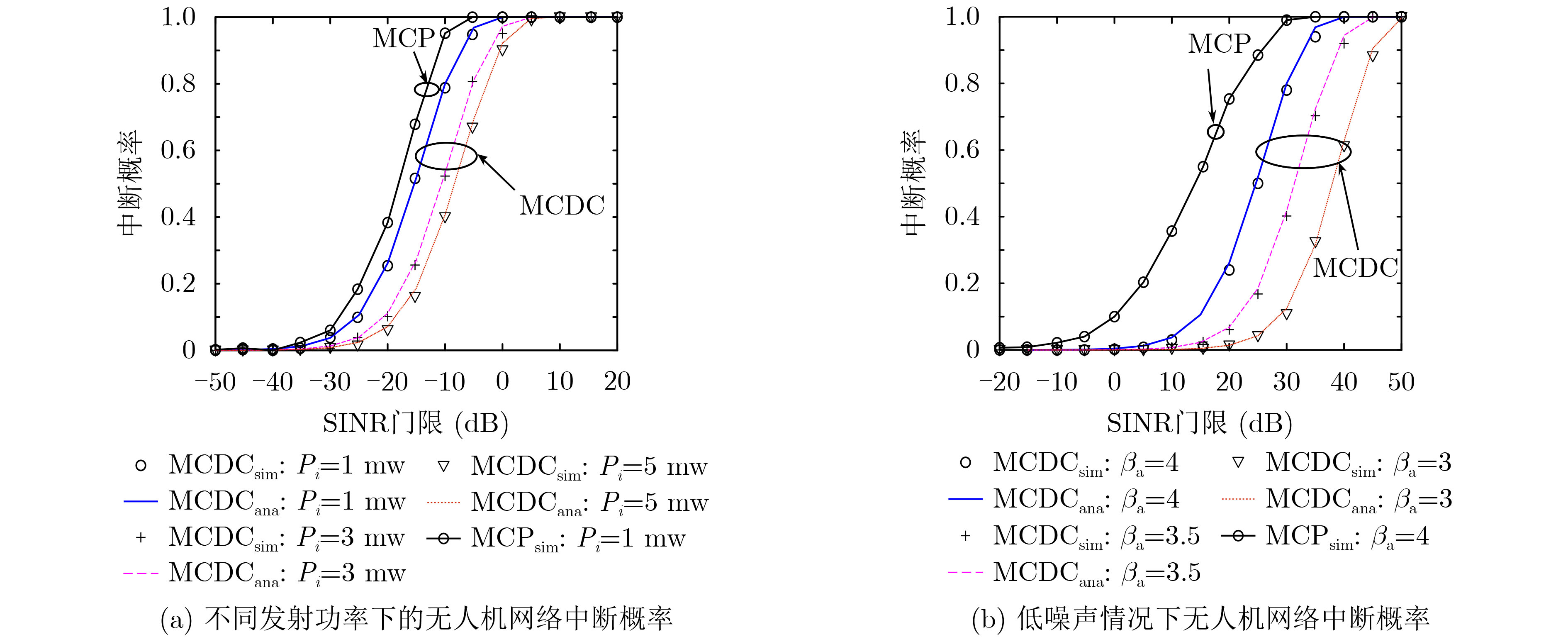
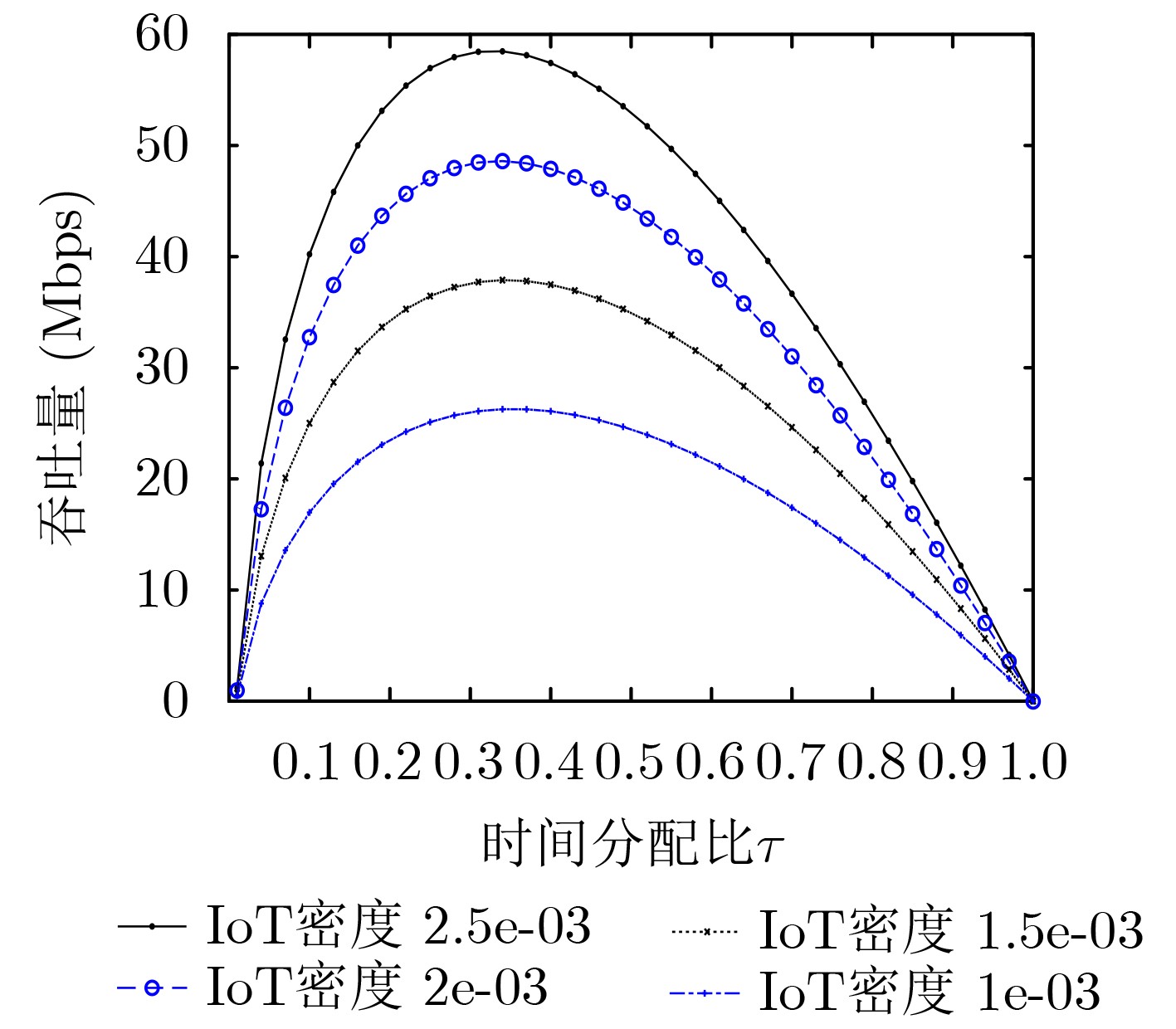
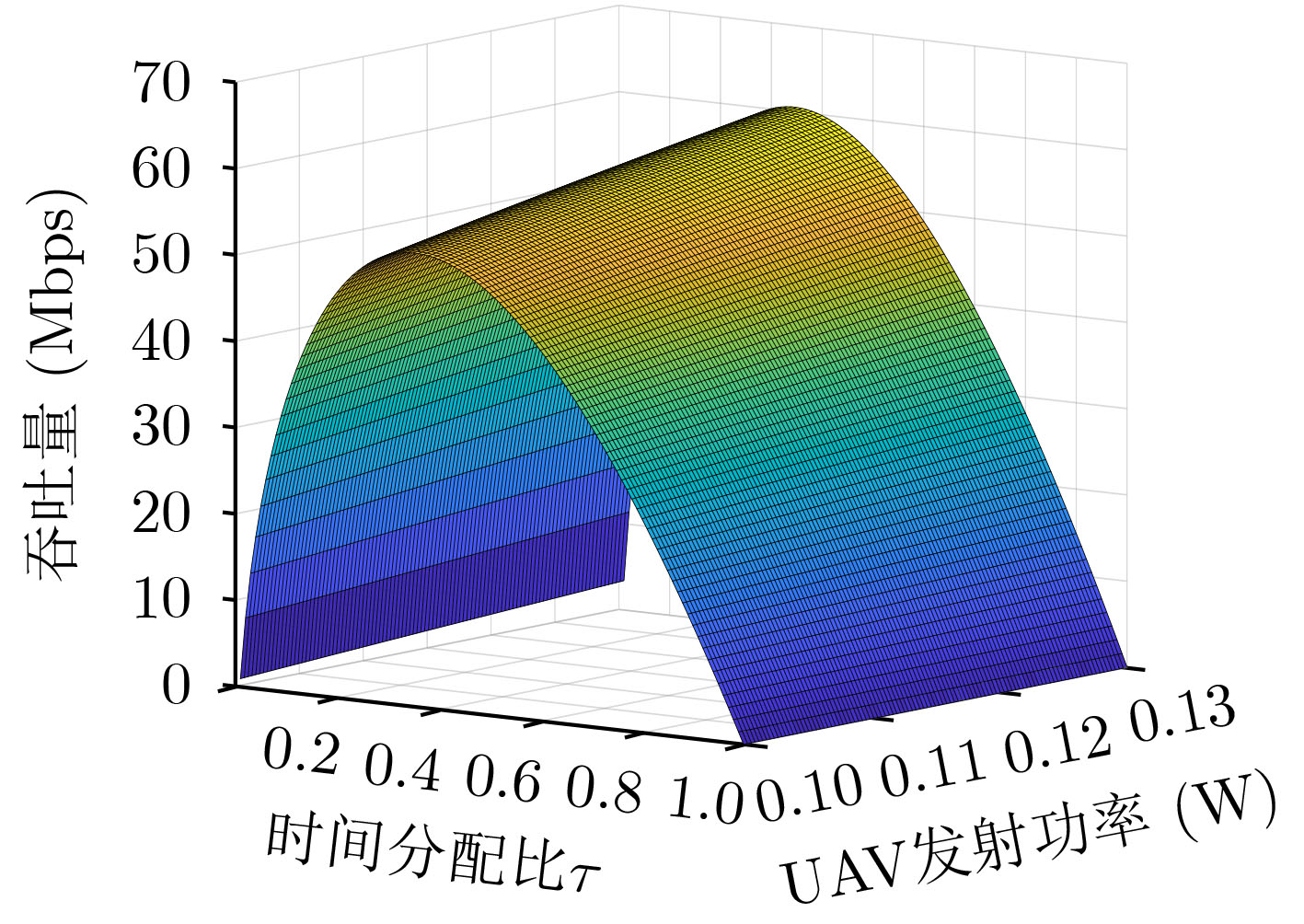
摘要: 在无人机(UAV)辅助的能量受限低功耗物联网(IoT)节点数据传输场景中,针对传统的Matérn聚类过程 (MCP)建模造成的无人机覆盖冗余问题,该文提出一种Matérn集群下的距离约束分簇策略(MCDC)。该策略采用带有距离约束的Matérn聚类过程对无人机和地面IoT节点位置进行了建模,实现冗余覆盖的大幅度下降。在此分布策略下,IoT节点首先通过从无人机发送的射频信号中收集能量,然后利用收集的能量向无人机进行上行数据传输,解决IoT节点能量受限问题。此外,分析了IoT节点传输机会以及无人机群空地网络的上行传输中断性能和吞吐量,并衡量了上下行阶段的时间分配比,无人机的发射功率,以及IoT节点密度等参数对网络性能的影响。最后通过仿真对理论结果进行了验证。Abstract: A scenario of Unmanned Aerial Vehicle (UAV) assisted energy-constrained low-power Internet of Things (IoT) nodes for data transmission is considered, to address the problem of UAV coverage overlapped caused by the traditional Matérn Cluster Process (MCP) modeling, a Matérn Cluster under Distance Constraint (MCDC) strategy is proposed. The strategy uses the Matérn cluster process with distance constraints to model the locations of UAVs and IoT nodes, and achieves a significant reduction in redundant coverage. Under the MCDC strategy, the energy-constrained IoT nodes first harvest energy from the radio frequency signal sent by the UAV, and then use the harvested energy to transmit information to the UAV. The transmission probability of the IoT nodes, the outage performance, and the network throughput are analyzed; The time allocation ratio of the harvesting phase, the transmission power of the UAV, and the impact of the density of IoT nodes on the network performance are measured. Finally, the theoretical results are verified by simulation.
-
表 1 系统参数
参数 数值 参数 数值 $ {P_{\text{t}}} $ 0.1~0.2 w $ {P_i} $ 1~2 mW $ \eta $ 0.56 H 20 m T 1 s ε –50 dB $ {\lambda _{\text{u}}} $ 10–4 /m2 $ {\lambda _{\text{I}}} $ 10–3 /m2 $ {\beta _{\text{a}}} $ 3 $ {\beta _{\text{b}}} $ 3  下载: 导出CSV
下载: 导出CSV
-
[1] 贾向东, 路艺, 纪澎善, 等. 大规模无人机协助的多层异构网络设计及性能研究[J]. 电子与信息学报, 2021, 43(9): 2632–2639. doi: 10.11999/JEIT200443JIA Xiangdong, LU Yi, JI Pengshan, et al. Design of large-scale UAV-assisted multi-tier heterogeneous networks and performance research[J]. Journal of Electronics &Information Technology, 2021, 43(9): 2632–2639. doi: 10.11999/JEIT200443 [2] JABBAR H, SONG Y S, and JEONG T T. RF energy harvesting system and circuits for charging of mobile devices[J]. IEEE Transactions on Consumer Electronics, 2010, 56(1): 247–253. doi: 10.1109/TCE.2010.5439152 [3] LU Xiao, WANG Ping, NIYATO D, et al. Wireless charging technologies: Fundamentals, standards, and network applications[J]. IEEE Communications Surveys & Tutorials, 2016, 18(2): 1413–1452. doi: 10.1109/COMST.2015.2499783 [4] MA Dong, LAN Guohao, HASSAN M, et al. Sensing, computing, and communications for energy harvesting IoTs: A survey[J]. IEEE Communications Surveys & Tutorials, 2020, 22(2): 1222–1250. doi: 10.1109/COMST.2019.2962526 [5] CHO S, LEE K, KANG B, et al. Weighted harvest-then-transmit: UAV-enabled wireless powered communication networks[J]. IEEE Access, 2018, 6: 72212–72224. doi: 10.1109/ACCESS.2018.2882128 [6] YANG Zhaohui, XU Wei, and SHIKH-BAHAEI M. Energy efficient UAV communication with energy harvesting[J]. IEEE Transactions on Vehicular Technology, 2020, 69(2): 1913–1927. doi: 10.1109/TVT.2019.2961993 [7] DU Yao, YANG Kun, WANG Kezhi, et al. Joint resources and workflow scheduling in UAV-enabled wirelessly-powered MEC for IoT systems[J]. IEEE Transactions on Vehicular Technology, 2019, 68(10): 10187–10200. doi: 10.1109/TVT.2019.2935877 [8] XU Jie, ZENG Yong, and ZHANG Rui. UAV-enabled wireless power transfer: Trajectory design and energy optimization[J]. IEEE Transactions on Wireless Communications, 2018, 17(8): 5092–5106. doi: 10.1109/TWC.2018.2838134 [9] CHEN Ruirui, LI Xinyan, SUN Yanjing, et al. Multi-UAV coverage scheme for average capacity maximization[J]. IEEE Communications Letters, 2020, 24(3): 653–657. doi: 10.1109/LCOMM.2019.2962774 [10] WANG Jian, LIU Yongxin, NIU Shuteng, et al. Extensive throughput enhancement for 5G-enabled UAV swarm networking[J]. IEEE Journal on Miniaturization for Air and Space Systems, 2021, 2(4): 199–208. doi: 10.1109/JMASS.2021.3067861 [11] MIAO Jiansong, WANG Pengjie, ZHANG Qian, et al. Throughput maximization for multi-UAV enabled millimeter wave WPCN: Joint time and power allocation[J]. China Communications, 2020, 17(10): 142–156. doi: 10.23919/JCC.2020.10.010 [12] JI Baofeng, LI Yuqi, ZHOU Benchuan, et al. Performance analysis of UAV relay assisted IoT communication network enhanced with energy harvesting[J]. IEEE Access, 2019, 7: 38738–38747. doi: 10.1109/ACCESS.2019.2906088 [13] CHEN Qinbo. Joint position and resource optimization for multi-UAV-aided relaying systems[J]. IEEE Access, 2020, 8: 10403–10415. doi: 10.1109/ACCESS.2020.2965162 [14] 李莉, 叶鹏, 彭张节, 等. 一种超密集异构网中联合干扰协调方法研究[J]. 电子与信息学报, 2019, 41(1): 9–15. doi: 10.11999/JEIT180290LI Li, YE Peng, PENG Zhangjie, et al. Research on joint interference coordination approach in ultra-dense heterogeneous network[J]. Journal of Electronics &Information Technology, 2019, 41(1): 9–15. doi: 10.11999/JEIT180290 [15] ZHOU Lai, YANG Zhi, ZHOU Shidong, et al. Coverage probability analysis of UAV cellular networks in urban environments[C]. 2018 IEEE International Conference on Communications Workshops, Kansas City, USA, 2018. [16] LIU Chang, DING Ming, MA Chuan, et al. Performance analysis for practical unmanned aerial vehicle networks with LoS/NLoS transmissions[C]. 2018 IEEE International Conference on Communications Workshops, Kansas City, USA, 2018. [17] SAHA C, AFSHANG M, and DHILLON H S. Enriched K-tier HetNet model to enable the analysis of user-centric small cell deployments[J]. IEEE Transactions on Wireless Communications, 2017, 16(3): 1593–1608. doi: 10.1109/TWC.2017.2649495 [18] QIU Chen, WEI Zhiqing, FENG Zhiyong, et al. Joint resource allocation, placement and user association of multiple UAV-mounted base stations with in-band wireless backhaul[J]. IEEE Wireless Communications Letters, 2019, 8(6): 1575–1578. doi: 10.1109/LWC.2019.2928544 [19] QIU Chen, WEI Zhiqing, YUAN Xin, et al. Multiple UAV-mounted base station placement and user association with joint fronthaul and backhaul optimization[J]. IEEE Transactions on Communications, 2020, 68(9): 5864–5877. doi: 10.1109/TCOMM.2020.3001136 [20] MOHAMED Z and AÏSSA S. Leveraging UAVs with intelligent reflecting surfaces for energy-efficient communications with cell-edge users[C]. 2020 IEEE International Conference on Communications Workshops, Dublin, Ireland, 2020: 1–6. [21] HAYAJNEH A M, ZAIDI S A R, MCLERNON D C, et al. Performance analysis of UAV enabled disaster recovery network: A stochastic geometric framework based on matern cluster processes[C]. The 3rd International Conference on Intelligent Signal Processing, London, UK, 2017: 1–6. [22] ZHANG Shangwei and LIU Jiajia. Analysis and optimization of multiple unmanned aerial vehicle-assisted communications in post-disaster areas[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 12049–12060. doi: 10.1109/TVT.2018.2871614 [23] LEE S, ZHANG Rui, and HUANG Kaibin. Opportunistic wireless energy harvesting in cognitive radio networks[J]. IEEE Transactions on Wireless Communications, 2013, 12(9): 4788–4799. doi: 10.1109/TWC.2013.072613.130323 [24] ANDREWS J G, GUPTA A K, and DHILLON H S. A primer on cellular network analysis using stochastic geometry[J]. arXiv: 1604.03183, 2016. -

 下载:
下载:



图(7) / 表(1)
计量
- 文章访问数: 1207
- HTML全文浏览量: 564
- PDF下载量: 97
- 被引次数: 0
