

Joint Trajectory Design for Unmanned Marine Cluster
-
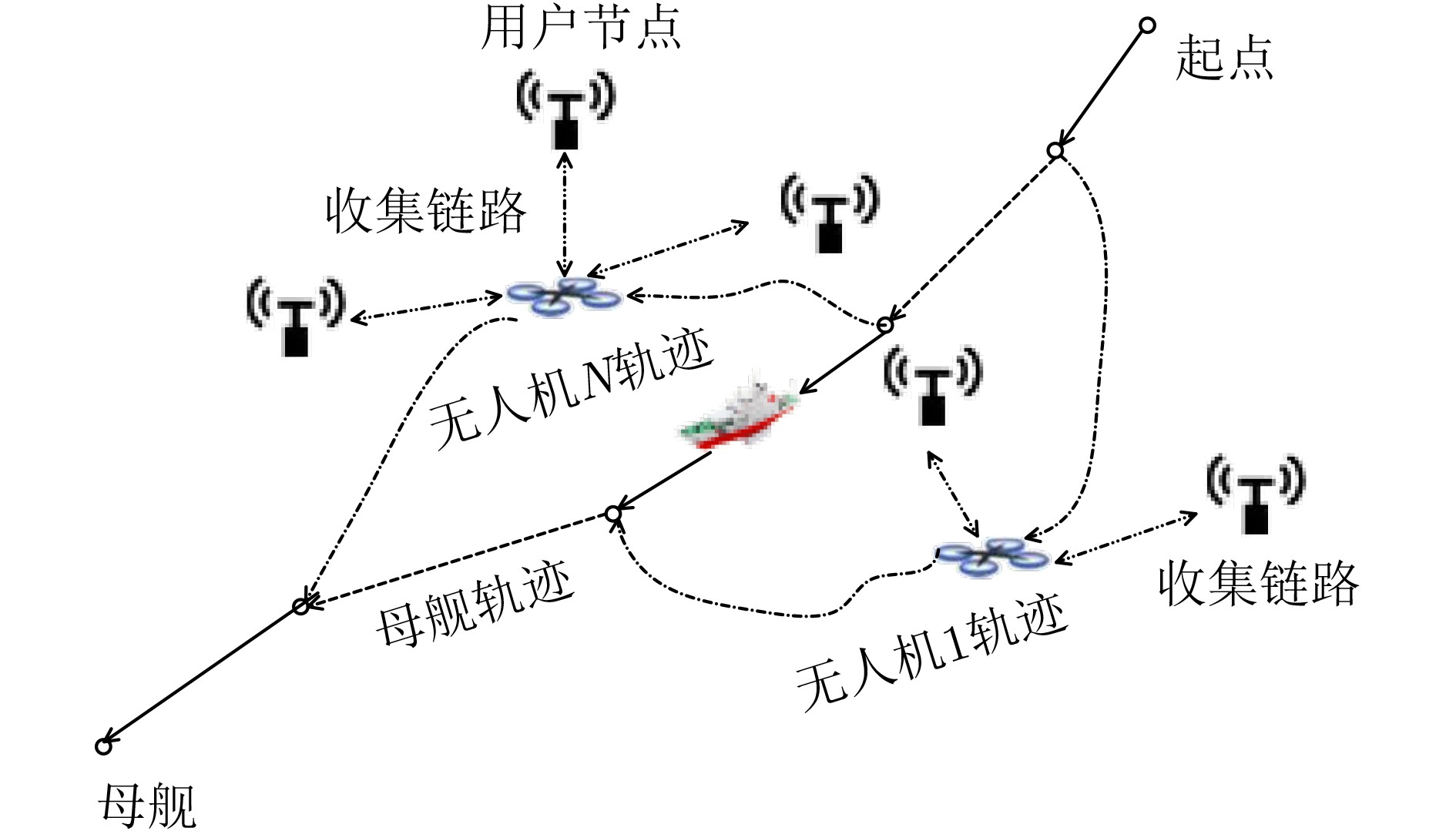
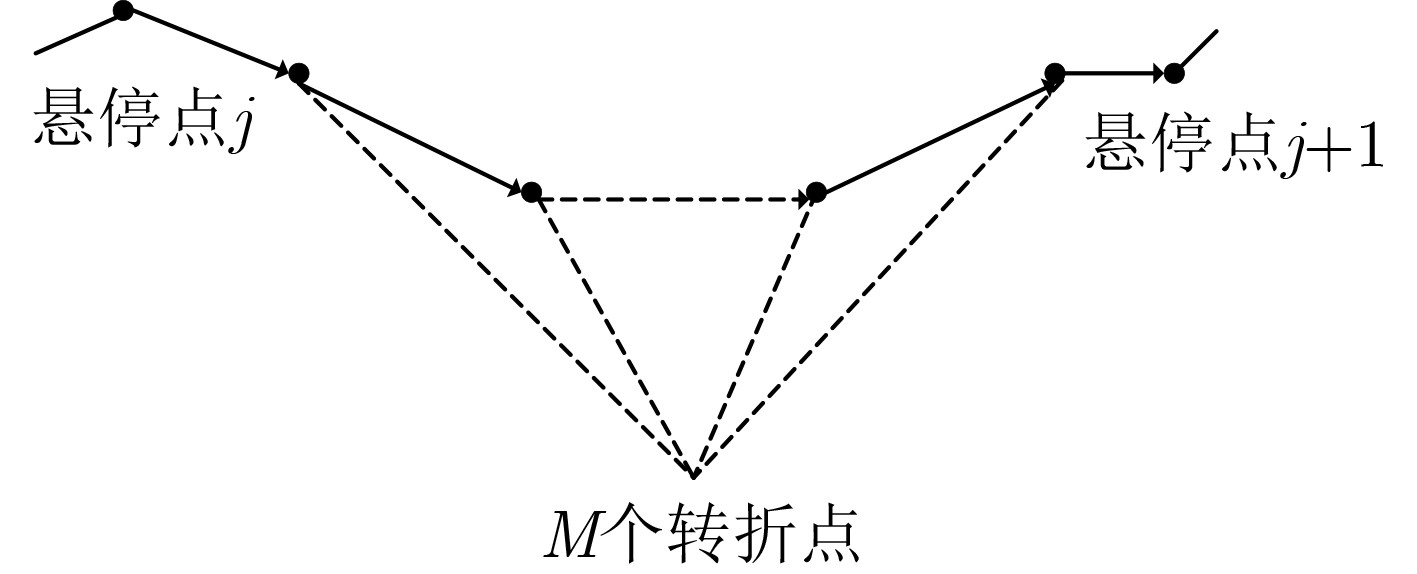
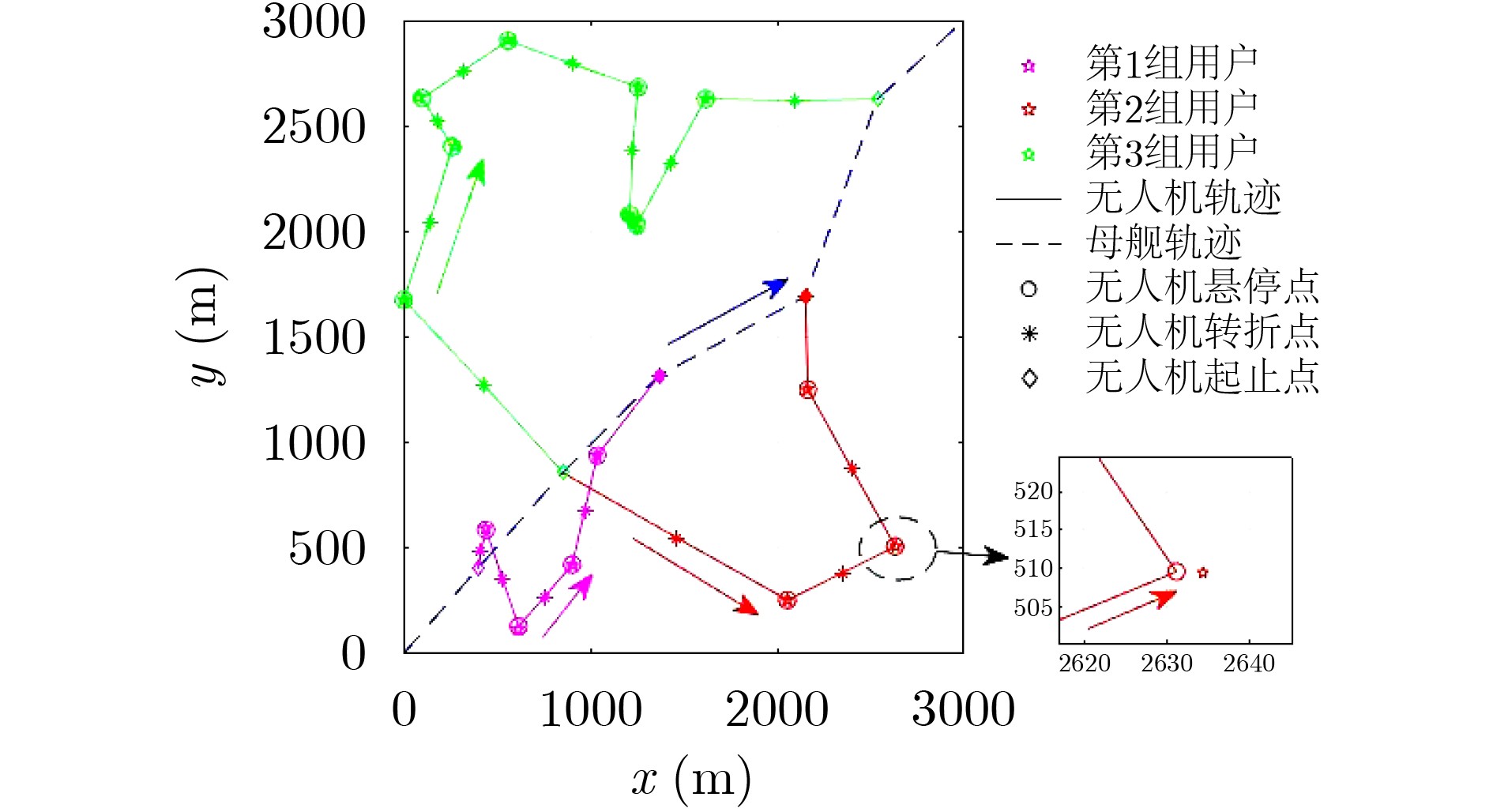
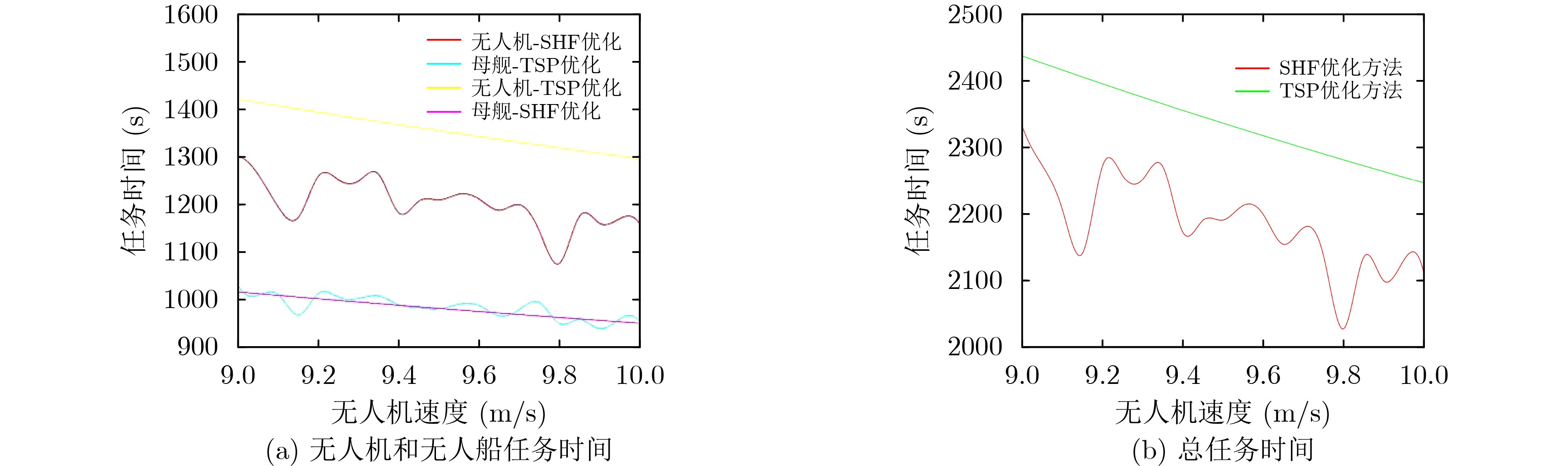
摘要: 针对海洋大数据收集场景,为提高数据收集效率,该文提出一种无人机和无人船联合数据收集方法。无人船在行驶过程中,通过放飞无人机并行驶到指定地点回收无人机,实现对目标海域内节点数据的高效收集。为最小化无人船和无人机工作时间,该文在无人机集群任务分配的基础上,引入连续悬停飞行(Successive-Hover-and-Fly, SHF)结构以实现低复杂度的联合轨迹优化。待优化问题受限于节点数据量和无人机速度,是难以求解的非凸问题。因此,该文提出了一个高效的连续凸近似技术迭代算法以得到次优解,并通过计算机仿真得以验证。Abstract: Considering an ocean data collection scenario, to improve data collection efficiency, this paper proposes a joint data collection approach for UAVs and platform. The platform releases UAVs to collect the data and sails to the designated places to recover them, while the UAVs are responsible for the data collection task. To minimize the overall working time of the UAVs and the platform, this paper introduces the Successive-Hover-and-Fly (SHF) structure to achieve a low-complexity joint trajectory optimization on basis of task allocation of the UAV cluster. The formulated problem is difficult to be solved due to the non-convexity, which is constrained by the demanded upload data amount and a maximum UAV speed. To address this problem, an efficient successive convex approximation technique iterative algorithm is proposed to obtain a sub-optimal solution, which is validated by simulation.
-
Key words:
- Wireless communication /
- Trajectory optimization /
- Task allocation /
- Convex approximation
-
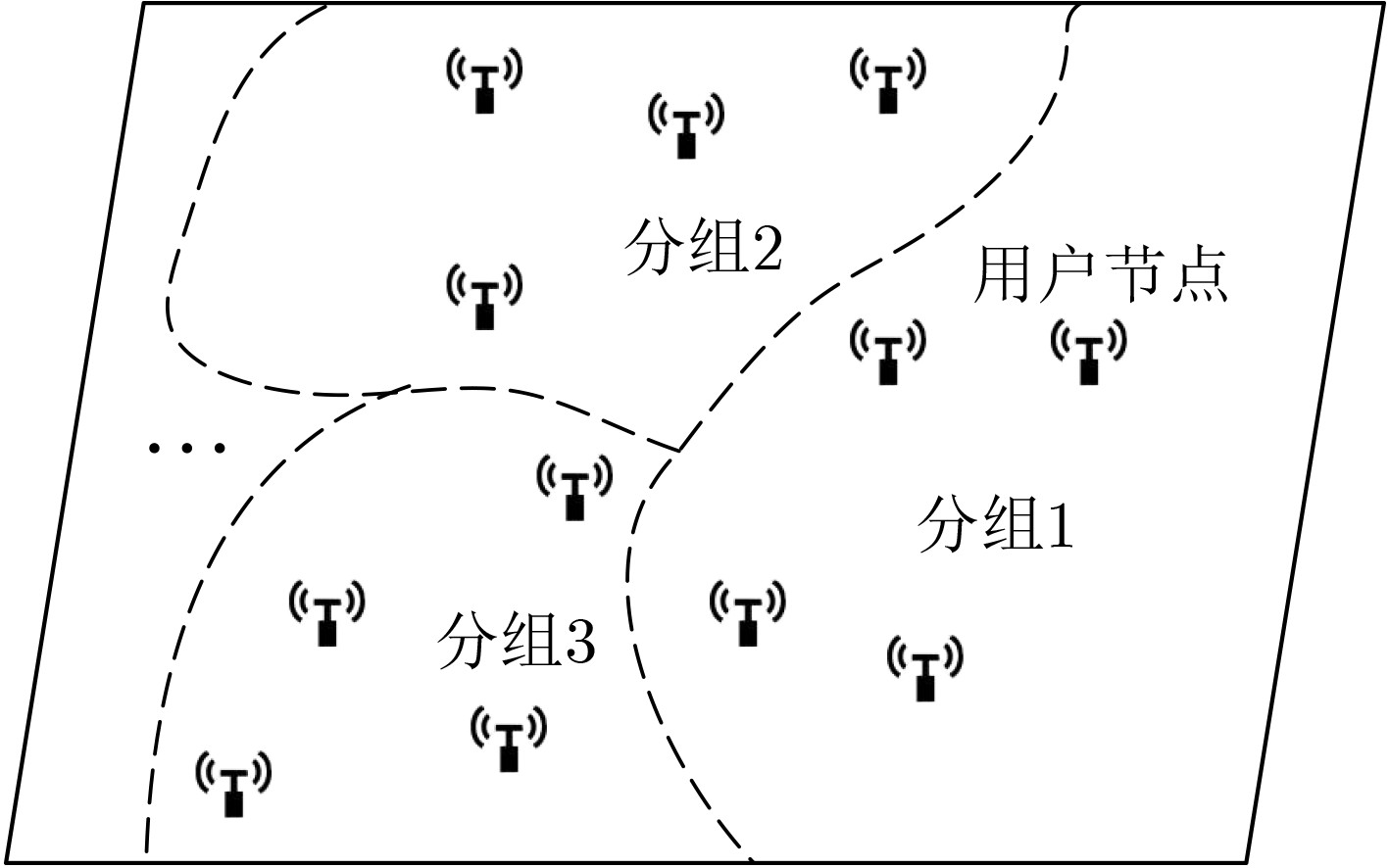
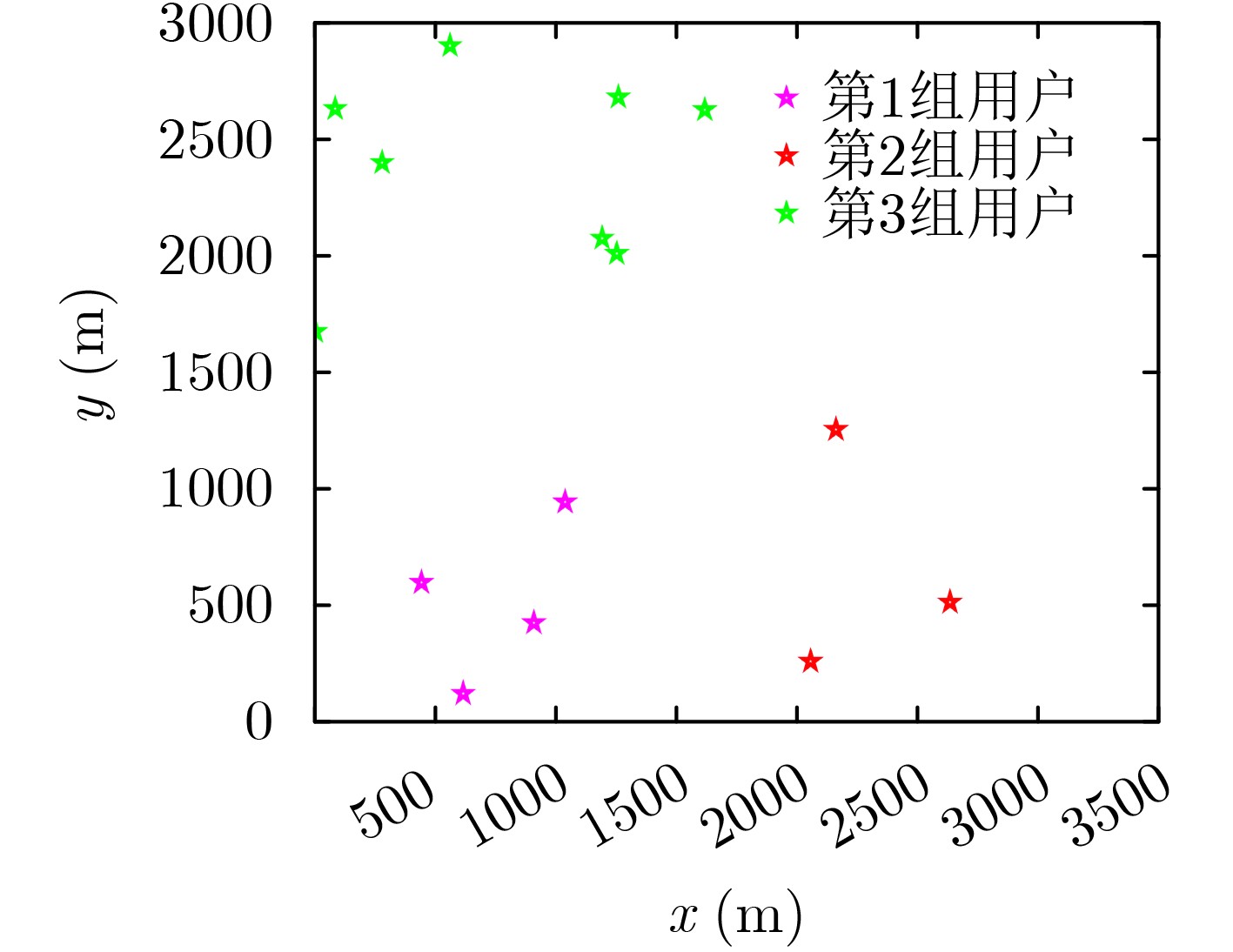
表 1 K-means算法流程
初始化 随机选取N个用户作为初始聚类中心 迭代 (1) 计算其他点到聚类中心的距离,并按照距离最近的原则将
他们进行分类,计算目标函数值;(2) 更新聚类中心:每个分组中的用户位置的平均值作为新的
聚类中心,计算目标函数的值;(3) 如果分组结果较上次没有发生变化,则停止迭代; 否则,返回(1)。  下载: 导出CSV
下载: 导出CSV
表 2 轨迹迭代算法
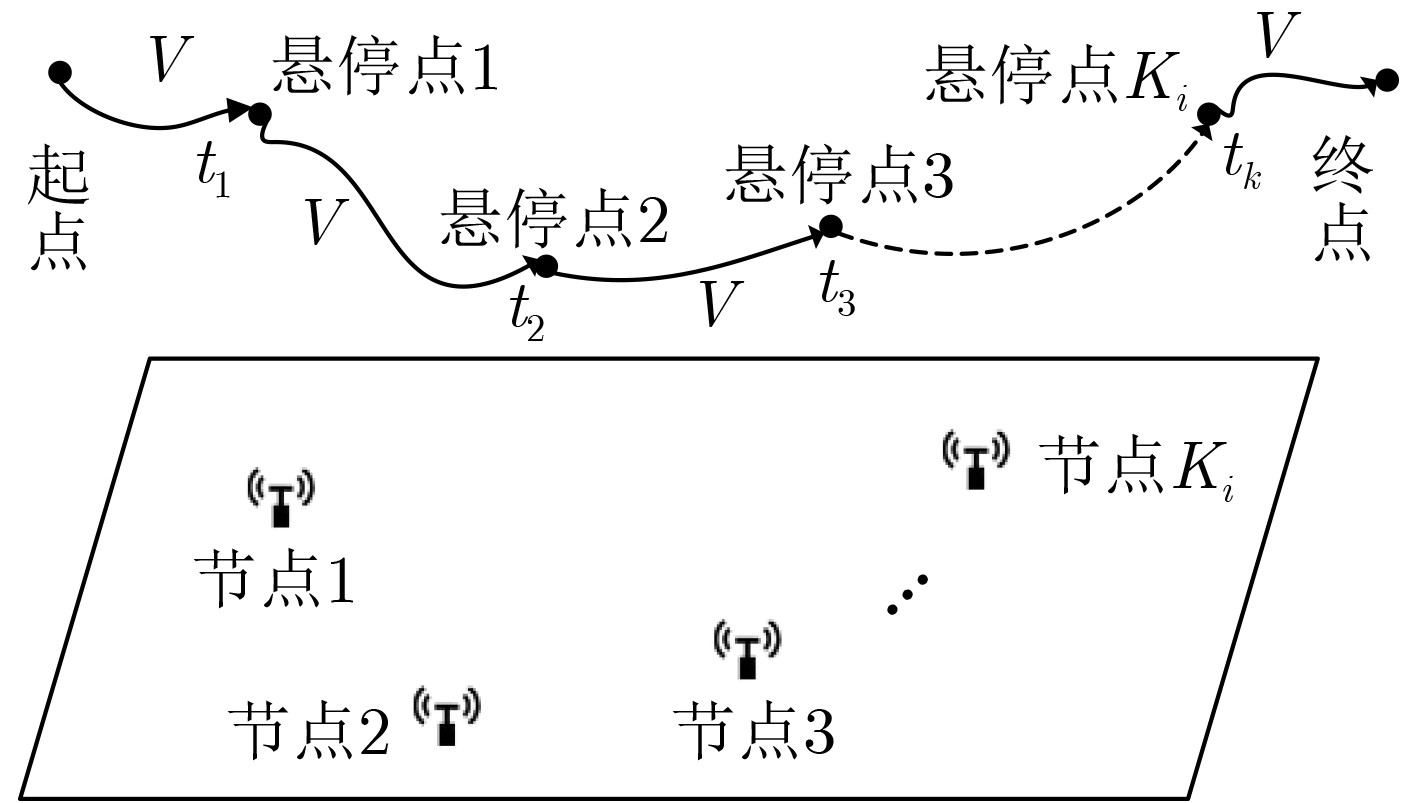
初始化 基于TSP初始化轨迹$ ({\boldsymbol{x}}_i^{(0)},{\boldsymbol{y}}_i^{(0)},{\boldsymbol{t}}_i^{(0)}) $和汇合时间$ T_i^{(0)} $,并设置迭代阈值Ε和迭代次数r=0。 迭代 (1) 在迭代点$ ({\boldsymbol{x}}_i^{(r)},{\boldsymbol{y}}_i^{(r)},{\boldsymbol{t}}_i^{(r)}) $对传输数据量凸近似得到$ Q_{i,k}^{(r)}({\boldsymbol{x}}_i^{(r)},{\boldsymbol{y}}_i^{(r)},{\boldsymbol{t}}_i^{(r)}) $; (2) 通过解问题(P2)得到优化解$ ({\boldsymbol{x}}_i^*,{\boldsymbol{y}}_i^*,{\boldsymbol{t}}_i^*) $,并根据式(11)得到$ T_i^* $; (3) 如果总任务时间相对于前一次迭代的时间优化小于Ε,停止迭代; 否则,令$ ({\boldsymbol{x}}_i^{(r + 1)},{\boldsymbol{y}}_i^{(r + 1)},{\boldsymbol{t}}_i^{(r + 1)},T_i^{(r + 1)}) = ({\boldsymbol{x}}_i^*,{\boldsymbol{y}}_i^*,{\boldsymbol{t}}_i^*,T_i^*) $,r=r+1,回到步骤(1)。
下载: 导出CSV
-
[1] 王福涛, 于仁成, 李景喜, 等. 地球大数据支撑海洋可持续发展[J]. 中国科学院院刊, 2021, 36(8): 932–939. doi: 10.16418/j.issn.1000-3045.20210707003WANG Futao, YU Rencheng, LI Jingxi, et al. Big earth data in support of marine sustainable development[J]. Bulletin of the Chinese Academy of Sciences, 2021, 36(8): 932–939. doi: 10.16418/j.issn.1000-3045.20210707003 [2] MOTLAGH N H, TALEB T, and AROUK O. Low-altitude unmanned aerial vehicles-based internet of things services: Comprehensive survey and future perspectives[J]. IEEE Internet of Things Journal, 2016, 3(6): 899–922. doi: 10.1109/JIOT.2016.2612119 [3] BOUKERCHE A, WU Qiyue, and SUN Peng. Efficient green protocols for sustainable wireless sensor networks[J]. IEEE Transactions on Sustainable Computing, 2020, 5(1): 61–80. doi: 10.1109/TSUSC.2019.2913374 [4] 徐常志, 靳一, 李立, 等. 面向6G的星地融合无线传输技术[J]. 电子与信息学报, 2021, 43(1): 28–36. doi: 10.11999/JEIT200363XU Changzhi, JIN Yi, LI Li, et al. Wireless transmission technology of satellite-terrestrial integration for 6G mobile communication[J]. Journal of Electronics &Information Technology, 2021, 43(1): 28–36. doi: 10.11999/JEIT200363 [5] LIU Tianyu, CUI Miao, ZHANG Guangchi, et al. 3D trajectory and transmit power optimization for UAV-enabled multi-link relaying systems[J]. IEEE Transactions on Green Communications and Networking, 2021, 5(1): 392–405. doi: 10.1109/TGCN.2020.3048135 [6] 陈新颖, 盛敏, 李博, 等. 面向6G的无人机通信综述[J]. 电子与信息学报, 2022, 44(3): 781–789.CHEN Xinying, SHENG Min, LI Bo, et al. Survey on unmanned aerial vehicle communications for 6G[J]. Journal of Electronics & Information Technology, 2022, 44(3): 781–789. [7] LAKEW D S, MASOOD A, and CHO S. 3D UAV placement and trajectory optimization in UAV assisted wireless networks[C]. Proceedings of 2020 International Conference on Information Networking (ICOIN), Barcelona, Spain, 2020: 80–82. [8] WANG Jingjing, JIANG Chunxiao, HAN Zhu, et al. Taking drones to the next level: Cooperative distributed unmanned-aerial-vehicular networks for small and mini drones[J]. IEEE Vehicular Technology Magazine, 2017, 12(3): 73–82. doi: 10.1109/MVT.2016.2645481 [9] 吴官翰, 贾维敏, 赵建伟, 等. 基于多智能体强化学习的混合博弈模式下多无人机辅助通信系统设计[J]. 电子与信息学报, 2022, 44(3): 940–950WU Guanhan, JIA Weimin, ZHAO Jianwei, et al. MARL-based design of multi-unmanned aerial vehicle assisted communication system with hybrid gaming mode[J]. Journal of Electronics & Information Technology, 2022, 44(3): 940–950 [10] 张广驰, 严雨琳, 崔苗, 等. 无人机基站的飞行路线在线优化设计[J]. 电子与信息学报, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525ZHANG Guangchi, YAN Yulin, CUI Miao, et al. Online trajectory optimization for the UAV-mounted base stations[J]. Journal of Electronics &Information Technology, 2021, 43(12): 3605–3611. doi: 10.11999/JEIT200525 [11] GUO Xianzhen, LI Bin, ZHAI Daosen, et al. Performance analysis and optimization of a UAV-enabled two-way relaying network under FSMH, NC, and PNC schemes[J]. IEEE Internet of Things Journal, 2021, 8(24): 17802–17816. doi: 10.1109/JIOT.2021.3083648 [12] XU Jie, ZENG Yong, and ZHANG Rui. UAV-enabled wireless power transfer: Trajectory design and energy optimization[J]. IEEE Transactions on Wireless Communications, 2018, 17(8): 5092–5106. doi: 10.1109/TWC.2018.2838134 [13] HU Yulin, YUAN Xiaopeng, XU Jie, et al. Optimal 1D trajectory design for UAV-enabled multiuser wireless power transfer[J]. IEEE Transactions on Communications, 2019, 67(8): 5674–5688. doi: 10.1109/TCOMM.2019.2911294 [14] HU Yulin, YUAN Xiaopeng, ZHANG Guohua, et al. Sustainable wireless sensor networks with UAV-enabled wireless power transfer[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 8050–8064. doi: 10.1109/TVT.2021.3090849 [15] KAUSHIK S. An enhanced recommendation system using proposed efficient K means user-based clustering algorithm[C]. Proceedings of 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Greater Noida, India, 2018: 251–255. [16] YUAN Xiaopeng, YANG Tianyu, HU Yulin, et al. Trajectory design for UAV-enabled multiuser wireless power transfer with nonlinear energy harvesting[J]. IEEE Transactions on Wireless Communications, 2021, 20(2): 1105–1121. doi: 10.1109/TWC.2020.3030773 [17] DAS H and KUMAR S. A parallel TSP-based algorithm for balanced graph partitioning[C]. Proceedings of the 46th International Conference on Parallel Processing (ICPP), Bristol, UK, 2017: 563–570. -

 下载:
下载:



图(9) / 表(2)
计量
- 文章访问数: 1137
- HTML全文浏览量: 1106
- PDF下载量: 162
- 被引次数: 0
