

3D Unmanned Aerial Vehicle Trajectory Design for Wireless Power Transfer
-
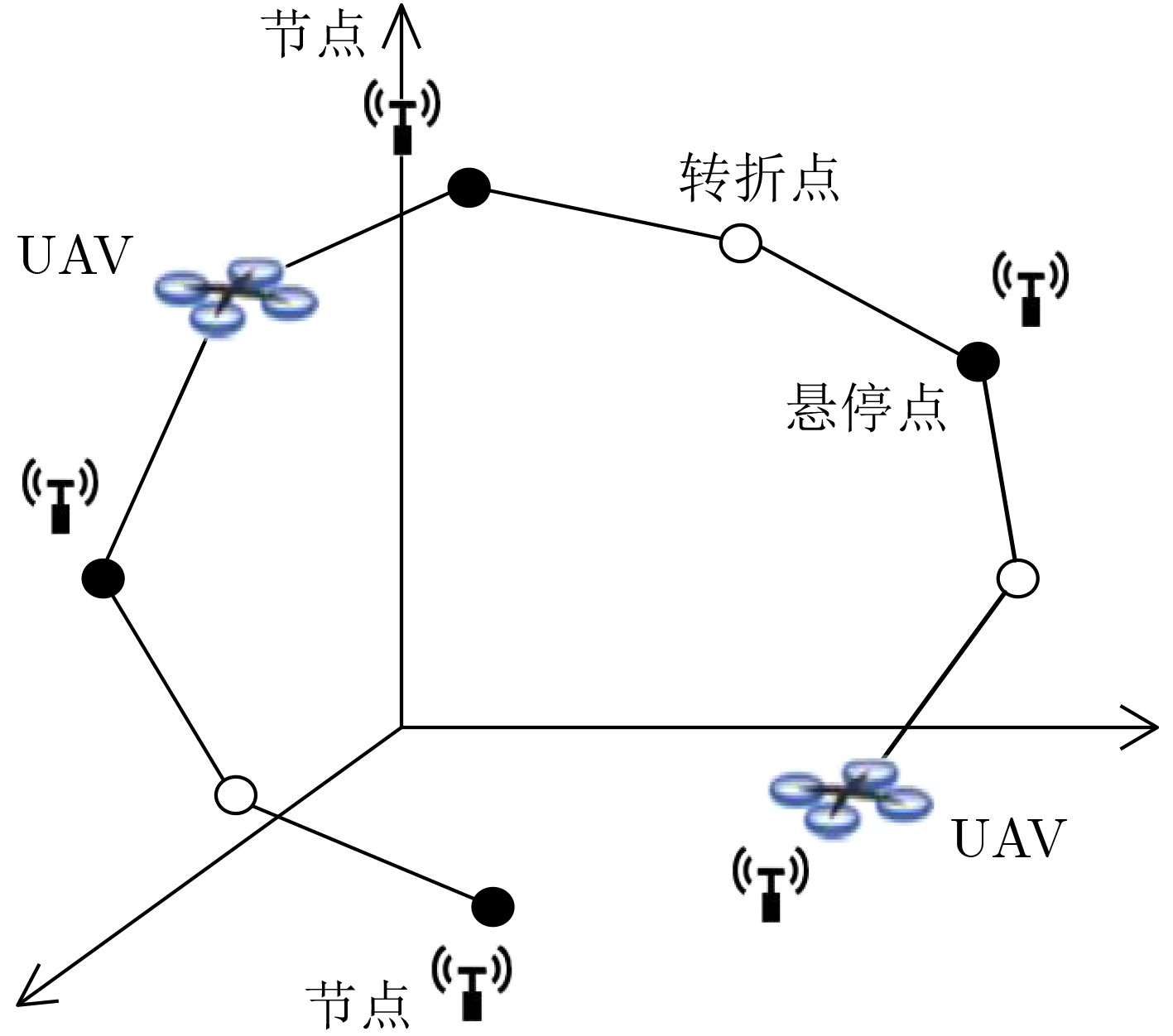
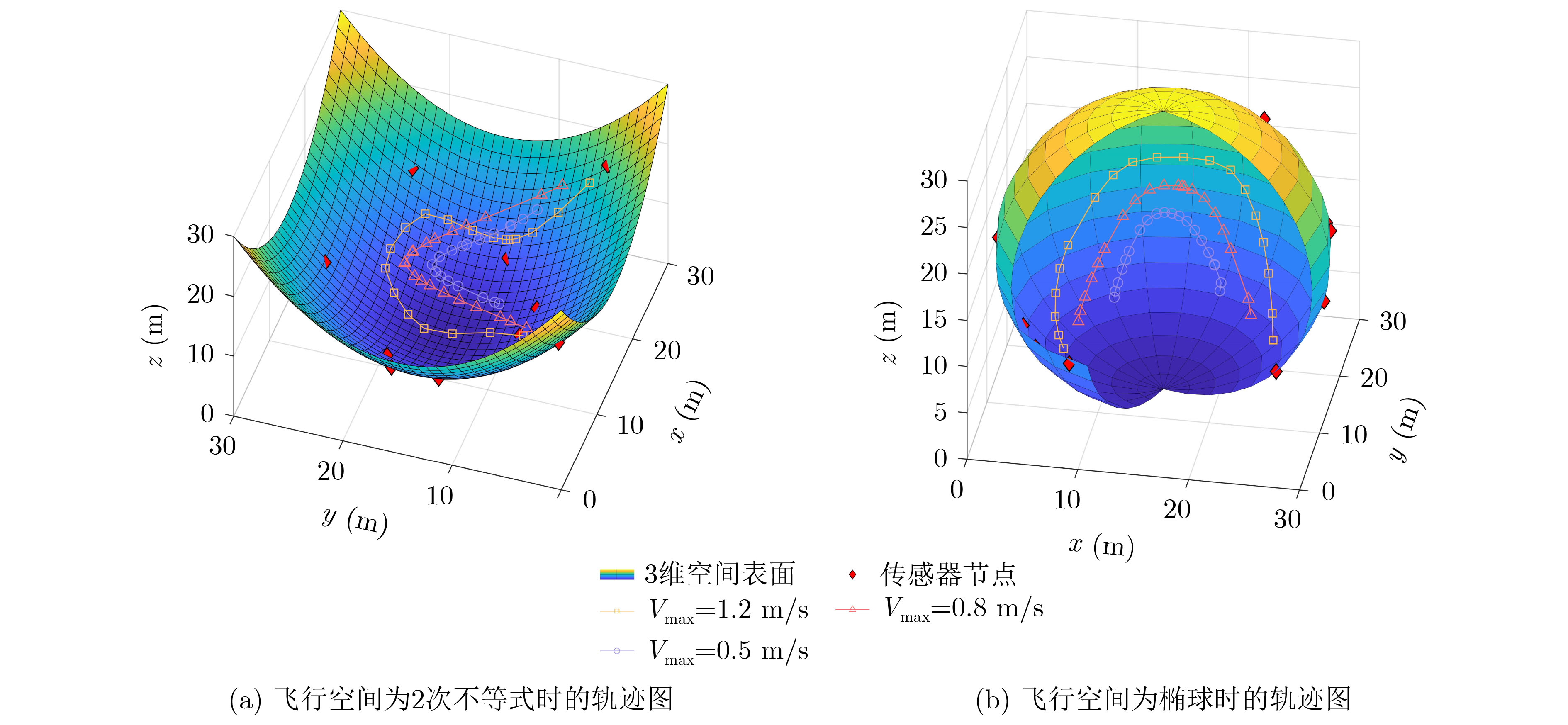
摘要: 在无人机(UAV)辅助的无线网络中,UAV轨迹设计可以有效地提升无线网络系统性能。然而,3维场景下的UAV轨迹设计问题因其高复杂性,目前仍是开放性研究问题,并缺少高性能的求解方案。该文针对具有一般性的无线能量传输(WPT)系统中UAV 3维轨迹设计问题,在凸空间下,基于间续悬飞(SHF)的最优轨迹结构,提出获得高性能3维轨迹的求解方案。Abstract: In Unmanned Aerial Vehicle (UAV)-enabled wireless network, the trajectory design of UAV can effectively improve the system performance. However, due to the high complexity in 3D scenario, UAV trajectory design is still an open research problem, where effective solutions are still missing. For UAV 3D trajectory design problems in general Wireless Power Transfer (WPT) system, this paper proposes a solution to obtain effective 3D trajectory based on the Successive Hovering and Flying (SHF) structure in convex space.
-
表 1 3维UAV轨迹设计迭代算法
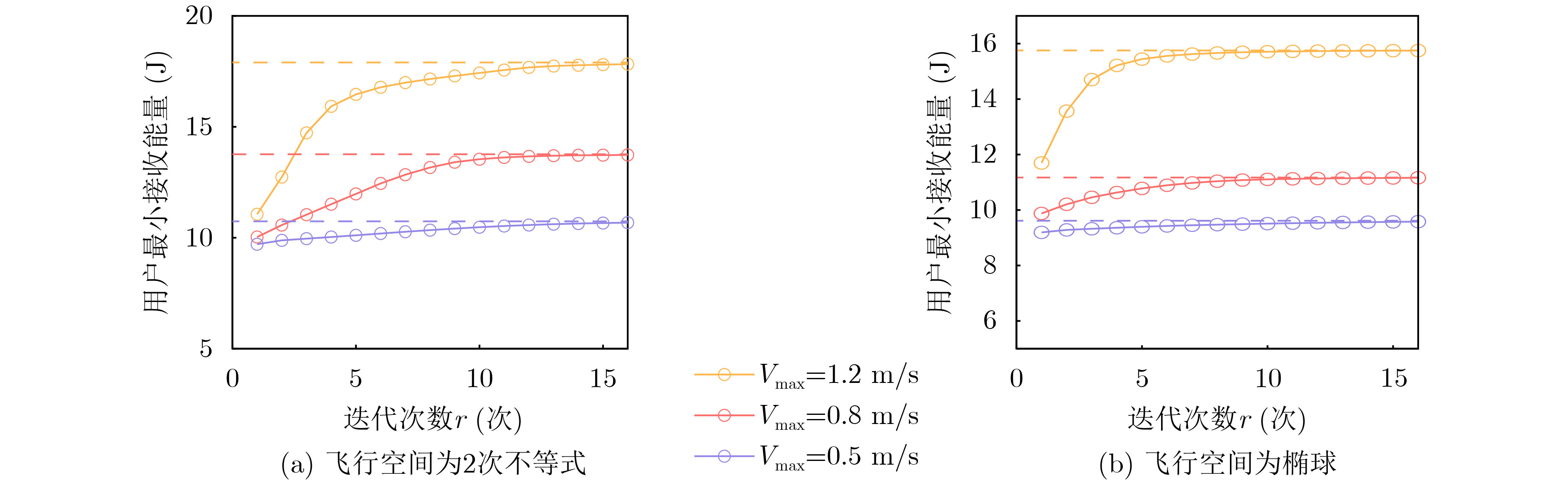
初始化: 由3维旅行商问题求解初始点$\left( { {{\boldsymbol{x}}^{\left( 0 \right)} },{{\boldsymbol{y}}^{\left( 0 \right)} },{{\boldsymbol{z}}^{\left( 0 \right)} },{{\boldsymbol{t}}^{\left( 0 \right)} } } \right)$。 迭代次数$r = 0$。 首次最优值对比值${E^{\left( { - 1} \right) * }} = 0$。 第r次迭代: (1) 基于式(悬停和飞行部分)在点$\left( { {{\boldsymbol{x}}^{\left( r \right)} },{{\boldsymbol{y}}^{\left( r \right)} },{{\boldsymbol{z}}^{\left( r \right)} },{{\boldsymbol{t}}^{\left( r \right)} } } \right)$建立近
似表达式$E_k^{\left( r \right)}\left( {{\boldsymbol{x}},{\boldsymbol{y}},{\boldsymbol{z}},{\boldsymbol{t}}} \right)$;(2) 求解凸问题(P3),获得最优点$\left( {{x^{\left( r \right)*}},{y^{\left( r \right)*}},{z^{\left( r \right)*}},{t^{\left( r \right)*}}} \right)$和最
优值${E^{\left( r \right) * }}$;(3) If 满足收敛条件${E}^{\left(r\right)\ast }-{E}^{\left(r-1\right)\ast } < \epsilon$,其中$\epsilon$为极小阈值; 最优解$ \left( {{x^*},{y^*},{z^*},{t^*}} \right) = \left( {{x^{\left( r \right)*}},{y^{\left( r \right)*}},{z^{\left( r \right)*}},{t^{\left( r \right)*}}} \right),$
${E^ * } = {E^{\left( r \right) * }} $;结束迭代; Else $\left( {{x^{\left( {r + 1} \right)}},{y^{\left( {r + 1} \right)}},{z^{\left( {r + 1} \right)}},{t^{\left( {r + 1} \right)}}} \right) = $
$ \left( {{x^{\left( r \right)*}},{y^{\left( r \right)*}},{z^{\left( r \right)*}},{t^{\left( r \right)*}}} \right)$;$r = r + 1$; 返回 (1)。 End  下载: 导出CSV
下载: 导出CSV
-
[1] YAN Hua, CHEN Yunfei, and YANG Shuanghua. UAV-enabled wireless power transfer with base station charging and UAV power consumption[J]. IEEE Transactions on Vehicular Technology, 2020, 69(11): 12883–12896. doi: 10.1109/TVT.2020.3015246 [2] 吕增威, 魏振春, 韩江洪, 等. 基于多目标优化的无线传感器网络移动充电及数据收集算法[J]. 电子与信息学报, 2019, 41(8): 1877–1884. doi: 10.11999/JEIT180897LÜ Zengwei, WEI Zhenchun, HAN Jianghong, et al. A mobile charging and data collecting algorithm based on multi-objective optimization[J]. Journal of Electronics &Information Technology, 2019, 41(8): 1877–1884. doi: 10.11999/JEIT180897 [3] LI Hang, XU Jie, ZHANG Rui, et al. A general utility optimization framework for energy-harvesting-based wireless communications[J]. IEEE Communications Magazine, 2015, 53(4): 79–85. doi: 10.1109/MCOM.2015.7081079 [4] BI Suzhi, HO C K, and ZHANG Rui. Wireless powered communication: Opportunities and challenges[J]. IEEE Communications Magazine, 2015, 53(4): 117–125. doi: 10.1109/MCOM.2015.7081084 [5] SU Chunxia, YE Fang, WANG Lichun, et al. UAV-assisted wireless charging for energy-constrained IoT devices using dynamic matching[J]. IEEE Internet of Things Journal, 2020, 7(6): 4789–4800. doi: 10.1109/JIOT.2020.2968346 [6] 黄郑, 王红星, 王成亮, 等. 一种适用于无人机的无线充电系统[J]. 电力电子技术, 2020, 54(9): 51–53,94. doi: 10.3969/j.issn.1000-100X.2020.09.015HUANG Zheng, WANG Hongxing, WANG Chengliang, et al. A wireless charging system for unmanned aerial vehicle[J]. Power Electronics, 2020, 54(9): 51–53,94. doi: 10.3969/j.issn.1000-100X.2020.09.015 [7] ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933 [8] LAKEW D S, MASOOD A, and CHO S. 3D UAV placement and trajectory optimization in UAV assisted wireless networks[C]. 2020 International Conference on Information Networking, Barcelona, Spain, 2020: 80–82. [9] XIE Lifeng, XU Jie, and ZHANG Rui. Throughput maximization for UAV-enabled wireless powered communication networks[J]. IEEE Internet of Things Journal, 2019, 6(2): 1690–1703. doi: 10.1109/JIOT.2018.2875446 [10] XIE Lifeng and XU Jie. Cooperative trajectory design and resource allocation for a Two-UAV two-user wireless powered communication system[C]. 2018 IEEE International Conference on Communication Systems, Chengdu, China, 2018: 7–12. [11] KU S, JUNG S, and LEE C. UAV trajectory design based on reinforcement learning for wireless power transfer[C]. The 2019 34th International Technical Conference on Circuits/Systems, Computers and Communications, JeJu, Korea (South), 2019: 1–3. [12] XU Jie, ZENG Yong, and ZHANG Rui. UAV-enabled multiuser wireless power transfer: Trajectory design and energy optimization[C]. The 2017 23rd Asia-Pacific Conference on Communications, Perth, Australia, 2017: 1–6. [13] XIE Lifeng, CAO Xiaowen, XU Jie, et al. UAV-enabled wireless power transfer: A tutorial overview[J]. IEEE Transactions on Green Communications and Networking, 2021, 5(4): 2042–2064. doi: 10.1109/TGCN.2021.3093718 [14] HU Yulin, YUAN Xiaopeng, XU Jie, et al. Optimal 1D trajectory design for UAV-enabled multiuser wireless power transfer[J]. IEEE Transactions on Communications, 2019, 67(8): 5674–5688. doi: 10.1109/TCOMM.2019.2911294 [15] HU Yulin, YUAN Xiaopeng, YANG Tianyu, et al. On the convex properties of wireless power transfer with nonlinear energy harvesting[J]. IEEE Transactions on Vehicular Technology, 2020, 69(5): 5672–5676. doi: 10.1109/TVT.2020.2980683 [16] HU Yulin, YUAN Xiaopeng, ZHANG Guohua, et al. Sustainable wireless sensor networks with UAV-enabled wireless power transfer[J]. IEEE Transactions on Vehicular Technology, 2021, 70(8): 8050–8064. doi: 10.1109/TVT.2021.3090849 -

 下载:
下载:


图(4) / 表(1)
计量
- 文章访问数: 1711
- HTML全文浏览量: 1017
- PDF下载量: 152
- 被引次数: 0
