

Characteristics Analysis of Ground Penetrating Radar Signals for Groundwater Pipe Leakage Environment
-
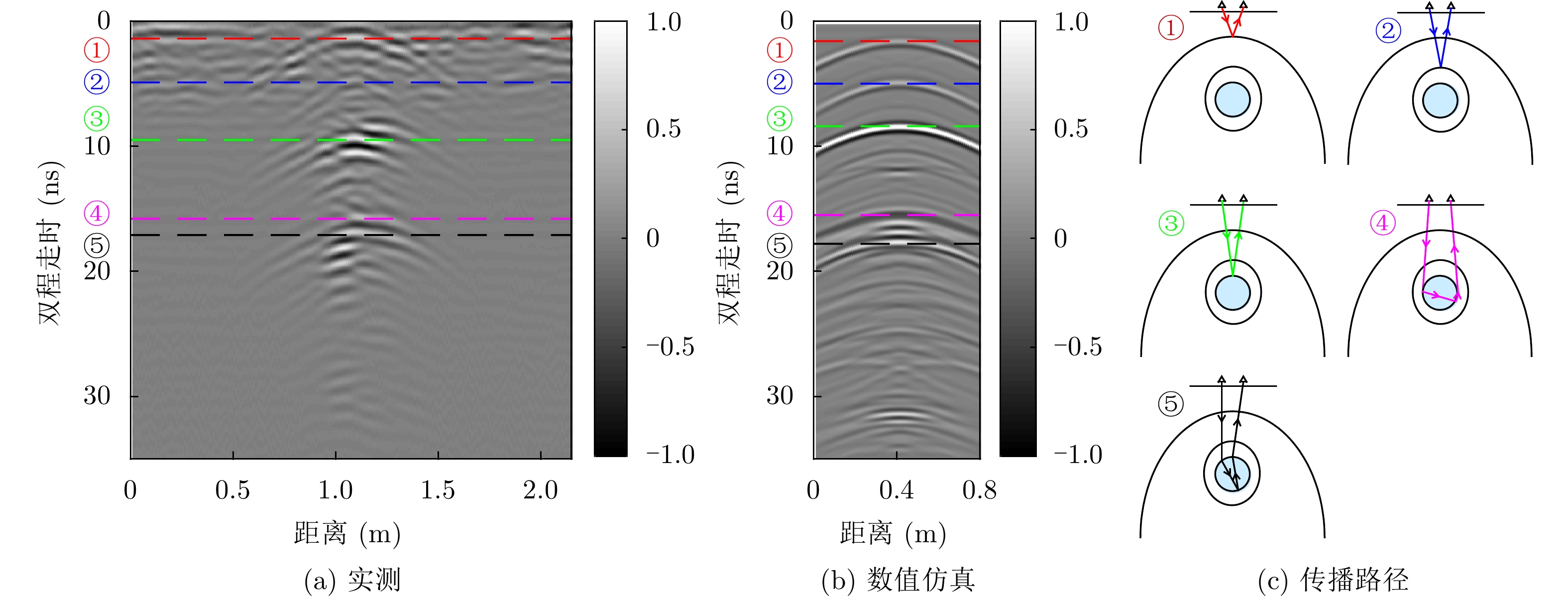
摘要: 探地雷达(GPR)在地下水管渗漏的检测中具有良好的应用前景。前期研究表明:地下水管的渗漏会在雷达剖面中形成震荡信号,但其形成机理尚不明晰。为揭示不同材质地下管道渗漏后的探地雷达信号特征的成因,该文结合物理模型试验与渗流场-电磁场数值模拟分析干砂中PVC管和金属管渗漏前后雷达信号特征、渗漏后震荡信号的形成机理和电磁波传播路径。结果表明:地下水管发生渗漏后,管道周围区域出现一定分层状态,电磁波在传播过程中存在更多界面反射和界面间的多次波。PVC管渗漏后,管道顶部、底部反射信号和爬行波信号在渗漏区中多次反射形成复杂的震荡双曲线信号,而金属管渗漏后管壁与渗漏区间存在多次反射。研究成果可为探地雷达在地下水管渗漏探测实际应用提供技术支持。Abstract: Ground Penetrating Radar (GPR) has a good prospect in the detection of underground water pipeline leakage. Previous studies have shown that the underground water pipes leakage can form oscillating hyperbolic signals in GPR profile, but its formation mechanism is not clear. To reveal the formation mechanism of GPR signal characteristics after underground pipeline leakage of different materials, physical model test and multi-physics numerical simulation are carried out to analyzes the characteristics of GPR signals before and after leakage, the formation mechanism of oscillating hyperbolic signal of PVC/metal pipe after leakage and the propagation path of electromagnetic wave. The results show that a stratified leakage zone appears around the underground water pipe after leakage, and more interface reflections and multiple waves bouncing between interfaces occur during the propagation of electromagnetic waves. After the leakage of PVC pipe, creeping wave signals and the reflected signals at the top and bottom of the PVC pipe are reflected many times in the leakage zone to form complex oscillatory hyperbolic signals, while there are multiple reflections between the pipe outer wall and the leakage zone after the metal pipe leakage. The results are helpful to promote the practical applications of GPR to underground pipeline leakage detection and related data interpretation.
-
Key words:
- Ground Penetrating Radar (GPR) /
- Pipe detection /
- Leakage localization
-
[1] 城乡建设统计年鉴[Z]. 住房与城乡建设部, 2020.Statistical Yearbook of Urban and Rural Construction[Z]. Ministry of Housing and Urban-Rural Development, 2020. [2] 王帅超. 城市地下管道渗漏引起的路面塌陷机理分析与研究[D]. [硕士论文], 郑州大学, 2017.WANG Shuaichao. Analysis and study on subsidence mechanisms of road caused by leakage of urban underground pipeline[D]. [Master dissertation], Zhengzhou University, 2017. [3] 城市供水统计年鉴[Z]. 统计局, 2018.Statistical Yearbook of Urban Water Supply[Z]. Statistics, 2018. [4] YU Yicheng, SAFARI A, NIU Xudong, et al. Acoustic and ultrasonic techniques for defect detection and condition monitoring in water and sewerage pipes: A review[J]. Applied Acoustics, 2021, 183: 108282. doi: 10.1016/j.apacoust.2021.108282 [5] ALMEIDA F, BRENNAN M, JOSEPH P, et al. On the acoustic filtering of the pipe and sensor in a buried plastic water pipe and its effect on leak detection: An experimental investigation[J]. Sensors, 2014, 14(3): 5595–5610. doi: 10.3390/s140305595 [6] LIU Zheng and KLEINER Y. State of the art review of inspection technologies for condition assessment of water pipes[J]. Measurement, 2013, 46(1): 1–15. doi: 10.1016/j.measurement.2012.05.032 [7] GAO Yan, BRENNAN M J, JOSEPH P F, et al. On the selection of acoustic/vibration sensors for leak detection in plastic water pipes[J]. Journal of Sound and Vibration, 2005, 283(3/5): 927–941. doi: 10.1016/j.jsv.2004.05.004 [8] DATTA S and SARKAR S. A review on different pipeline fault detection methods[J]. Journal of Loss Prevention in the Process Industries, 2016, 41: 97–106. doi: 10.1016/j.jlp.2016.03.010 [9] 廖光伟, 张春萍, 武治国, 等. 基于双参数监测的供水管网漏损实验研究[J]. 供水技术, 2018, 12(6): 17–21. doi: 10.3969/j.issn.1673-9353.2018.06.005LIAO Guangwei, ZHANG Chunping, WU Zhiguo, et al. Experimental study on leakage of water supply network based on the two-parameter monitoring[J]. Water Technology, 2018, 12(6): 17–21. doi: 10.3969/j.issn.1673-9353.2018.06.005 [10] BACH P M and KODIKARA J K. Reliability of infrared thermography in detecting leaks in buried water reticulation pipes[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(9): 4210–4224. doi: 10.1109/jstars.2017.2708817 [11] LIU Hai, SHI Zhenshi, LI Jianhui, et al. Detection of road cavities in urban cities by 3D ground-penetrating radar[J]. Geophysics, 2021, 86(3): WA25–WA33. doi: 10.1190/geo2020-0384.1 [12] CATALDO A, DE BENEDETTO E, CANNAZZA G, et al. Enhancement of leak detection in pipelines through time-domain reflectometry/ground penetrating radar measurements[J]. IET Science, Measurement & Technology, 2017, 11(6): 696–702. doi: 10.1049/iet-smt.2016.0310 [13] CATALDO A, PERSICO R, LEUCCI G, et al. Time domain reflectometry, ground penetrating radar and electrical resistivity tomography: A comparative analysis of alternative approaches for leak detection in underground pipes[J]. NDT & E International, 2014, 62: 14–28. doi: 10.1016/j.ndteint.2013.10.007 [14] GAO Lei, SONG Hantao, LIU Hanlong, et al. Model test study on oil leakage and underground pipelines using ground penetrating radar[J]. Russian Journal of Nondestructive Testing, 2020, 56(5): 435–444. doi: 10.1134/s1061830920050058 [15] LAI W W L, CHANG R K W, SHAM J F C, et al. Perturbation mapping of water leak in buried water pipes via laboratory validation experiments with high-frequency ground penetrating radar (GPR)[J]. Tunnelling and Underground Space Technology, 2016, 52: 157–167. doi: 10.1016/j.tust.2015.10.017 [16] OCAÑA-LEVARIO S J, CARREÑO-ALVARADO E P, AYALA-CABRERA D, et al. GPR image analysis to locate water leaks from buried pipes by applying variance filters[J]. Journal of Applied Geophysics, 2018, 152: 236–247. doi: 10.1016/j.jappgeo.2018.03.025 [17] 胡群芳, 郑泽昊, 刘海, 等. 三维探地雷达在城市市政管线渗漏探测中的应用[J]. 同济大学学报:自然科学版, 2020, 48(7): 972–981. doi: 10.11908/j.issn.0253-374x.19395HU Qunfang, ZHENG Zehao, LIU Hai, et al. Application of 3D ground penetrating radar to leakage detection of urban underground pipes[J]. Journal of Tongji University:Natural Science, 2020, 48(7): 972–981. doi: 10.11908/j.issn.0253-374x.19395 [18] LAU P K W, CHEUNG B W Y, LAI W W L, et al. Characterizing pipe leakage with a combination of GPR wave velocity algorithms[J]. Tunnelling and Underground Space Technology, 2021, 109: 103740. doi: 10.1016/j.tust.2020.103740 [19] 沈宇鹏, 董淑海, 王卿, 等. 城市供水管道渗漏程度的渗流模型分析与探地雷达信号正演[J]. 工程地质学报, 2016, 24(S1): 422–429. doi: 10.13544/j.cnki.jeg.2016.s1.062SHEN Yupeng, DONG Shuhai, WANG Qing, et al. Different degrees of water pipelines leakage model ananysis and GPR signal forward simulation[J]. Journal of Engineering Geology, 2016, 24(S1): 422–429. doi: 10.13544/j.cnki.jeg.2016.s1.062 [20] AYALA-CABRERA D, HERRERA M, IZQUIERDO J, et al. GPR-based water leak models in water distribution systems[J]. Sensors, 2013, 13(12): 15912–15936. doi: 10.3390/s131215912 [21] 费康, 彭劼. ABAQUS岩土工程实例详解[M]. 北京: 人民邮电出版社, 2017: 177FEI Kang and PENG Jie. ABAQUS geotechnical Examples are Explained in Detail[M]. Beijing: People's Post and Telecommunications Publishing House, 2017: 177. [22] 董泽君, 鹿琪, 冯晅, 等. 探地雷达测量土壤含水量的应用研究[J]. 地球物理学进展, 2017, 32(5): 2207–2213. doi: 10.6038/pg20170549DONG Zejun, LU Qi, FENG Xuan, et al. Estimation of soil water content using ground penetrating radar[J]. Progress in Geophysics, 2017, 32(5): 2207–2213. doi: 10.6038/pg20170549 [23] MCCUTCHEON M C, FARAHANI H J, STEDNICK J D, et al. Effect of soil water on apparent soil electrical conductivity and texture relationships in a dryland field[J]. Biosystems Engineering, 2006, 94(1): 19–32. doi: 10.1016/j.biosystemseng.2006.01.002 [24] WARREN C, GIANNOPOULOS A, and GIANNAKIS I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar[J]. Computer Physics Communications, 2016, 209: 163–170. doi: 10.1016/j.cpc.2016.08.020 [25] 刘素贞, 董硕, 张闯, 等. 基于电磁超声爬波法对空腔结构部位裂纹缺陷的检测[J]. 高电压技术, 2019, 45(7): 2119–2125. doi: 10.13336/j.1003-6520.hve.20190628008LIU Suzhen, DONG Shuo, ZHANG Chuang, et al. Detection of crack defects in cavity structures based on electromagnetic ultrasonic creeping wave method[J]. High Voltage Engineering, 2019, 45(7): 2119–2125. doi: 10.13336/j.1003-6520.hve.20190628008 [26] DEMIRCI S, YIGIT E, ESKIDEMIR I H, et al. Ground penetrating radar imaging of water leaks from buried pipes based on back-projection method[J]. NDT & E International, 2012, 47: 35–42. doi: 10.1016/j.ndteint.2011.12.008 [27] 王楠. 基于任意曲面建模技术的一致性几何绕射理论方法[D]. [博士论文], 西安电子科技大学, 2007.WANG Nan. Study on the uniform geometrical theory of diffraction method with targets constructed by arbitrary surfaces[D]. [Ph. D. dissertation], Xidian University, 2007. -


 下载:
下载:








图(8) / 表(1)
计量
- 文章访问数: 3389
- HTML全文浏览量: 1478
- PDF下载量: 256
- 被引次数: 0
