

Adaptive Assist-as-needed Upper Limb Mirror Control Strategy
-
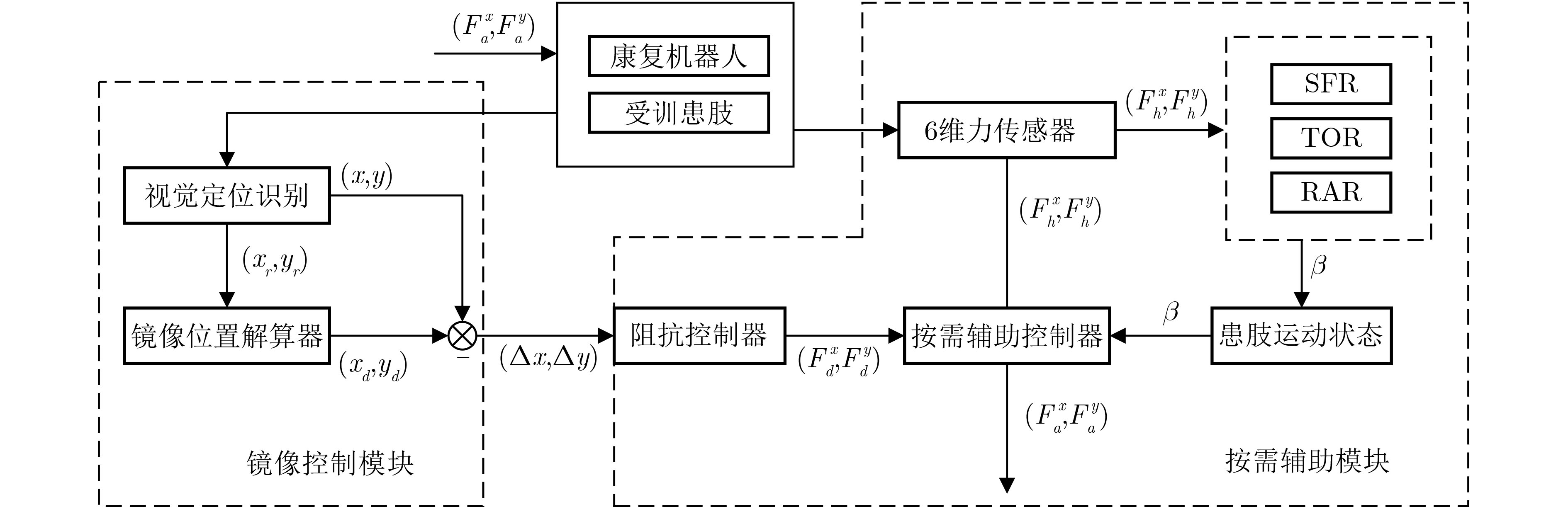
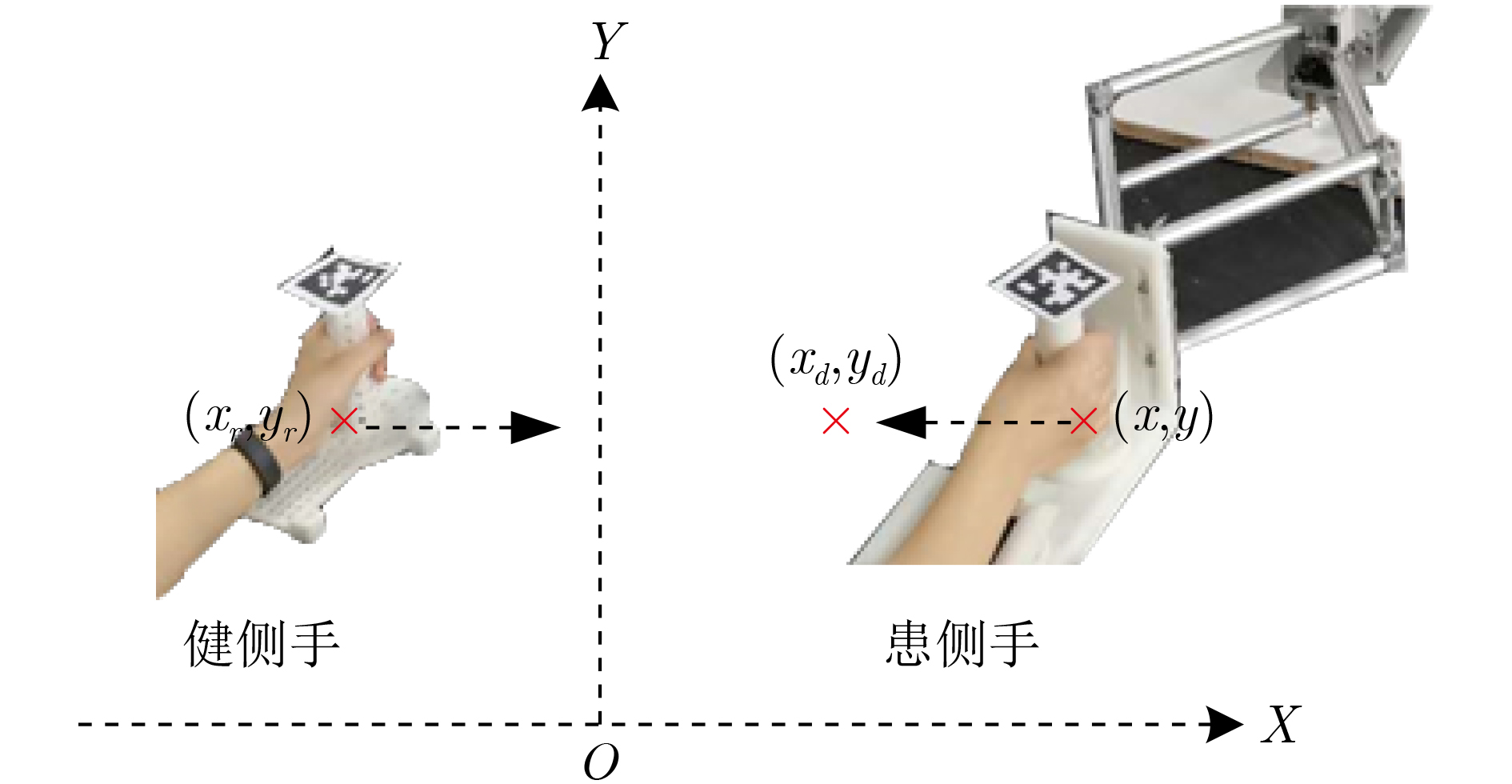
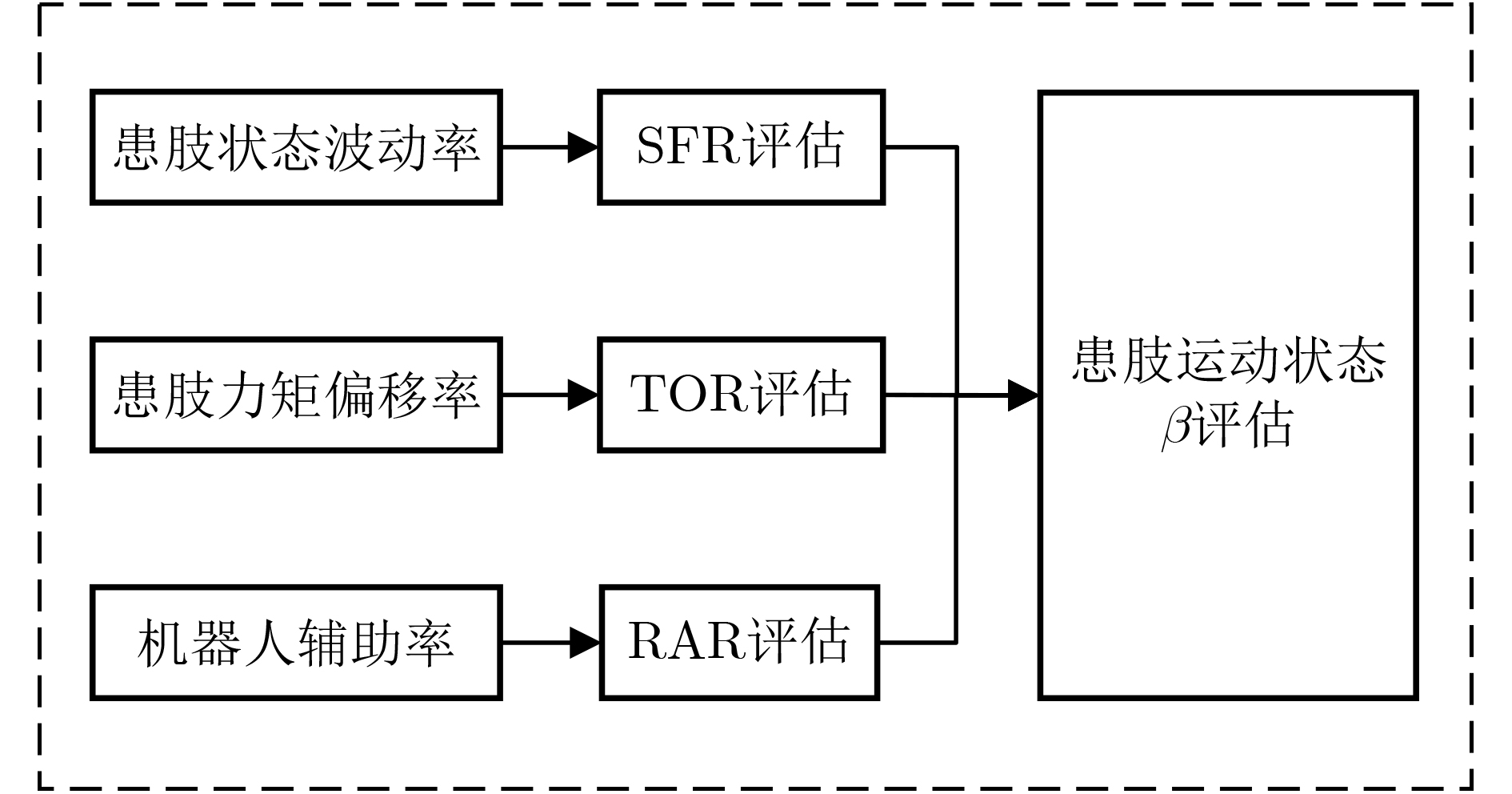
摘要: 为了提高偏瘫患者在镜像康复训练过程中的主动性与系统抗干扰性,该文提出一种基于自适应按需辅助的上肢镜像控制策略。该策略主要包括镜像控制和自适应按需辅助控制两个模块,镜像模块采集健侧位置解算出患侧期望位置,与患侧实际位置比较得到位置偏差;按需辅助模块结合传统阻抗控制和一种患肢运动状态评估方法,自动实时调节对患肢的辅助力大小,以实现患肢主动力矩的最大化。该文设计了两项实验,分别验证本策略对患者主动性和系统抗干扰性的提升效果,实验结果表明,对于镜像康复训练系统使用所提方法有效减小了56.9%的平均辅助力,患肢跟随健肢的位置精度为5.6%,能有效补偿89%的干扰外力。因此所提方法有效提升了训练者的主动性,同时具有良好的抗干扰性,满足镜像康复训练的要求。Abstract: In order to improve the initiative of hemiplegic patients and system anti-interference in the mirror rehabilitation training process, an upper limb mirror control strategy based on adaptive assist-as-needed is proposed. The strategy includes mainly two modules: mirror control and adaptive assist-as-needed control. The mirror module collects the position of the healthy side to calculate the desired position of the affected side, and compares it with the actual position of the affected side to obtain the position deviation; The adaptive assist-as-needed module combines thetraditional impedance control and the method for evaluating the movement state of the affected limb, automatically adjusts the auxiliary force to the affected limb in real time to maximize the active torque of the affected limb. Two experiments are designed to verify the effect of this strategy on patient initiative and system anti-interference. The experimental results show that the use of the proposed method for the mirror rehabilitation training system reduces effectively the average auxiliary force by 56.9%, and the position accuracy of the affected limb that follows the healthy limb is 5.6%, and the proposed method can effectively compensate 89% of the interfering external force. Therefore, the method improves effectively the initiative of the trainer, and at the same time has good anti-interference, and meets the requirements of mirror rehabilitation training.
-
表 1 实验方案
实验者 采用方法 实验条件 实验目的 实验次数 实验1 A/B/C/D 传统方法/本文方法 分别模拟2类不同患肢状态 比较两种方法控制性能 6 实验2 B/D 传统方法/本文方法 持续1s的10N外力干扰 比较两种方法抗干扰性能 6  下载: 导出CSV
下载: 导出CSV
表 2 患肢主动性验证实验结果
受试者 患肢状态 采用方法 平均辅助力(N) 辅助力降低率(%) 平均跟随误差(mm) 位置精度(%) A/C $ {\rm{SFR}} > 0.7,{\rm{TOR}} > 0.7 $
$ {\rm{SFR}} > 0.7,{\rm{TOR}} > 0.7 $传统方法 7.8 56.9 44.3 11.1 本文方法 4.9 27.5 6.9 B/D $ {\rm{SFR}} < 0.3,{\rm{TOR}} < 0.3 $ 传统方法 6.4 28.8 7.1 $ {\rm{SFR}} < 0.3,{\rm{TOR}} < 0.3 $ 本文方法 1.5 17.4 4.3
下载: 导出CSV
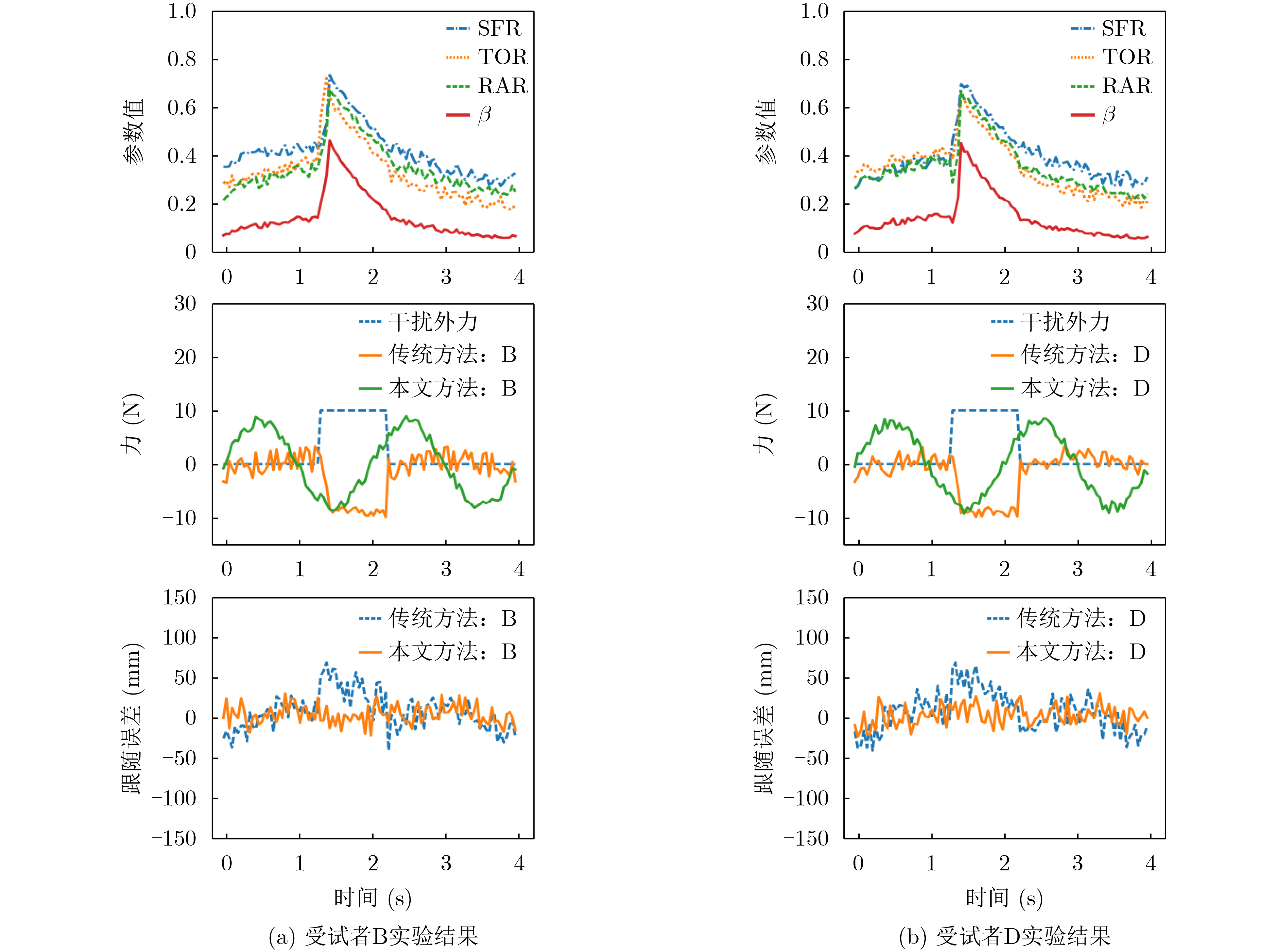
表 3 系统抗干扰性验证实验结果
患肢状态 采用方法 干扰外力(N) 辅助力变化(N) 辅助力补偿率(%) 平均跟随误差(mm) 误差增加率(%) ${\rm{SFR}} < 0.3,{\rm{TOR}} < 0.3$ 传统方法 10 0.4 4 40.3 39.9 ${\rm{SFR}} < 0.3,{\rm{TOR}}< 0.3$ 本文方法 10 –8.9 89 18.6 6.5
下载: 导出CSV
-
[1] 马玉萍, 闫晓洁, 李晓华, 等. 针刺结合康复训练对脑卒中偏瘫患者肢体运动功能及生活质量的影响[J]. 中国老年学杂志, 2020, 40(1): 25–28. doi: 10.3969/j.issn.1005-9202.2020.01.009MA Yuping, YAN Xiaojie, LI Xiaohua, et al. Effects of acupuncture combined with rehabilitation training on motor function and quality of life of stroke patients with hemiplegia[J]. Chinese Journal of Gerontology, 2020, 40(1): 25–28. doi: 10.3969/j.issn.1005-9202.2020.01.009 [2] CHENG Gaoxin, XU Linsen, XU Jiajun, et al. Robotic mirror therapy system for lower limb rehabilitation[J]. Industrial Robot, 2020, 48(2): 221–232. doi: 10.1108/IR-06-2020-0112 [3] 荣积峰, 丁力, 张雯, 等. 康复机器人结合镜像疗法对脑卒中偏瘫患者上肢功能的效果[J]. 中国康复理论与实践, 2019, 25(6): 709–713. doi: 10.3969/j.issn.1006-9771.2019.06.016RONG Jifeng, DING Li, ZHANG Wen, et al. Effects of robot-assisted therapy combined with mirror therapy on upper limbs rehabilitation in patients with hemiplegia after stroke[J]. Chinese Journal of Rehabilitation Theory and Practice, 2019, 25(6): 709–713. doi: 10.3969/j.issn.1006-9771.2019.06.016 [4] 陈臻, 刘佳敏, 陆晓, 等. 镜像康复机器人在偏瘫康复中的应用研究[J]. 中国康复医学杂志, 2020, 35(8): 903–906. doi: 10.3969/j.issn.1001-1242.2020.08.003CHEN Zhen, LIU Jiamin, LU Xiao, et al. Application research of mirror rehabilitation robot in hemiplegia rehabilitation[J]. Chinese Journal of Rehabilitation Medicine, 2020, 35(8): 903–906. doi: 10.3969/j.issn.1001-1242.2020.08.003 [5] KLINKWAN P, KONGMAROENG C, MUENGTAWEEPONGSA S, et al. The effectiveness of mirror therapy to upper extremity rehabilitation in acute stroke patients[J]. Applied Science and Engineering Progress, To be published. [6] ZHANG Yuqian, XING Ying, LI Congqin, et al. Mirror therapy for unilateral neglect after stroke: A systematic review[J]. European Journal of Neurology, 2021, 29(1): 358–371. doi: 10.1111/ene.15122 [7] WANG Weiwen and FU Lichen. Mirror therapy with an exoskeleton upper-limb robot based on IMU measurement system[C]. 2011 IEEE International Symposium on Medical Measurements and Applications, Bari, Italy, 2011. [8] SHAHBAZI M, ATASHZAR S F, TAVAKOLI M, et al. Therapist-in-the-Loop robotics-assisted mirror rehabilitation therapy: An Assist-as-Needed framework[C]. IEEE International Conference on Robotics and Automation, Seattle, USA, 2015. [9] 瞿畅, 吴炳, 陈厚军, 等. 体感控制的上肢外骨骼镜像康复机器人系统[J]. 中国机械工程, 2018, 29(20): 2484–2489. doi: 10.3969/j.issn.1004-132X.2018.20.014QU Chang, WU Bing, CHEN Houjun, et al. Upper-limb exoskeletal mirror rehabilitation robot systems based on motion sensing control[J]. China Mechanical Engineering, 2018, 29(20): 2484–2489. doi: 10.3969/j.issn.1004-132X.2018.20.014 [10] HOGAN N, KREBS H I, ROHRER B, et al. Motions or muscles? Some behavioral factors underlying robotic assistance of motor recovery[J]. Journal of Rehabilitation Research & Development, 2006, 43(5): 605. doi: 10.1682/JRRD.2005.06.0103 [11] WARRAICH Z and KLEIM J A. Neural plasticity: The biological substrate for neurorehabilitation[J]. PM&R, 2010, 2(Suppl 12): S208–S219. [12] 赵兴景, 朱杰, 罗翔. 自抗扰技术在下肢康复训练器中的应用[J]. 东南大学学报:自然科学版, 2019, 49(6): 1026–1032. doi: 10.3969/j.issn.1001-0505.2019.06.002ZHAO Xingjing, ZHU Jie, LUO Xiang. Application of ADRC in lower limb rehabilitation training apparatus[J]. Journal of Southeast University:Natural Science Edition, 2019, 49(6): 1026–1032. doi: 10.3969/j.issn.1001-0505.2019.06.002 [13] 周秦源, 邵晨阳, 邵念锋, 等. 基于滑模阻抗的双足机器人单腿柔顺性控制研究[J]. 传感器与微系统, 2021, 40(4): 26–28,32. doi: 10.13873/J.1000-9787(2021)04-0026-03ZHOU Qinyuan, SHAO Chenyang, SHAO Nianfeng, et al. Research on one-leg flexibility control of biped robot based on sliding mode impedance[J]. Transducer and Microsystem Technologies, 2021, 40(4): 26–28,32. doi: 10.13873/J.1000-9787(2021)04-0026-03 [14] 赵太飞, 宫春杰, 张港, 等. 一种无人机集群安全高效的分区集结控制策略[J]. 电子与信息学报, 2021, 43(8): 2181–2188. doi: 10.11999/JEIT200601ZHAO Taifei, GONG Chunjie, ZHANG Gang, et al. A safe and high efficiency control strategy of unmanned aerial vehicles partition rendezvous[J]. Journal of Electronics &Information Technology, 2021, 43(8): 2181–2188. doi: 10.11999/JEIT200601 [15] 李根生, 佀国宁, 徐飞. 下肢外骨骼机器人控制策略研究进展[J]. 中国康复医学杂志, 2018, 33(12): 1488–1494. doi: 10.3969/j.issn.1001-1242.2018.12.025LI Gensheng, SI Guoning, and XU Fei. Research progress on control strategies of lower extremity exoskeleton robots[J]. Chinese Journal of Rehabilitation Medicine, 2018, 33(12): 1488–1494. doi: 10.3969/j.issn.1001-1242.2018.12.025 [16] 王嘉津, 左国坤, 张佳楫, 等. 腕功能康复机器人按需辅助控制策略研究[J]. 生物医学工程学杂志, 2020, 37(1): 129–135. doi: 10.7507/1001-5515.201902023WANG Jiajin, ZUO Guokun, ZHANG Jiaji, et al. Research on assist-as-needed control strategy of wrist function-rehabilitation robot[J]. Journal of Biomedical Engineering, 2020, 37(1): 129–135. doi: 10.7507/1001-5515.201902023 [17] PEHLIVAN A U, LOSEY D P, and O'MALLEY M K. Minimal assist-as-needed controller for upper limb robotic rehabilitation[J]. IEEE Transactions on Robotics, 2016, 32(1): 113–124. doi: 10.1109/TRO.2015.2503726 [18] LUO Lincong, PENG Liang, WANG Chen, et al. A greedy assist-as-needed controller for upper limb rehabilitation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(11): 3433–3443. doi: 10.1109/TNNLS.2019.2892157 [19] 欧阳云霞, 李会军, 宋爱国. 交互式自解耦桌面康复训练机器人系统[J]. 仪器仪表学报, 2021, 42(2): 171–179.OUYANG Yunxia, LI Huijun, and SONG Aiguo. Interactive self-decoupling desktop rehabilitation training robot system[J]. Chinese Journal of Scientific Instrument, 2021, 42(2): 171–179. [20] 秦超龙, 宋爱国, 吴常铖, 等. 基于Unity3D与Kinect的康复训练机器人情景交互系统[J]. 仪器仪表学报, 2017, 38(3): 530–536. doi: 10.3969/j.issn.0254-3087.2017.03.003QIN Chaolong, SONG Aiguo, WU Changcheng, et al. Scenario interaction system of rehabilitation training robot based on Unity3D and Kinect[J]. Chinese Journal of Scientific Instrument, 2017, 38(3): 530–536. doi: 10.3969/j.issn.0254-3087.2017.03.003 [21] 秦欢欢, 宋爱国, 莫依婷, 等. 带有双手力觉反馈的人机交互系统设计[J]. 仪器仪表学报, 2018, 39(7): 66–73. doi: 10.19650/j.cnki.cjsi.J1803373QIN Huanhuan, SONG Aiguo, MO Yiting, et al. Design of human-machine system with two-handed force feedback[J]. Chinese Journal of Scientific Instrument, 2018, 39(7): 66–73. doi: 10.19650/j.cnki.cjsi.J1803373 [22] 潘礼正, 宋爱国, 徐国政, 等. 上肢康复机器人实时安全控制[J]. 机器人, 2012, 34(2): 197–203,210. doi: 10.3724/SP.J.1218.2012.00197PAN Lizheng, SONG Aiguo, XU Guozheng, et al. Real-time safety control of upper-limb rehabilitation robot[J]. Robot, 2012, 34(2): 197–203,210. doi: 10.3724/SP.J.1218.2012.00197 -

 下载:
下载:




图(7) / 表(3)
计量
- 文章访问数: 1410
- HTML全文浏览量: 718
- PDF下载量: 123
- 被引次数: 0
