

3D Parameters Estimation of Helicopter with Constant Speed Circular Motion Based on Single Hydrophone
-
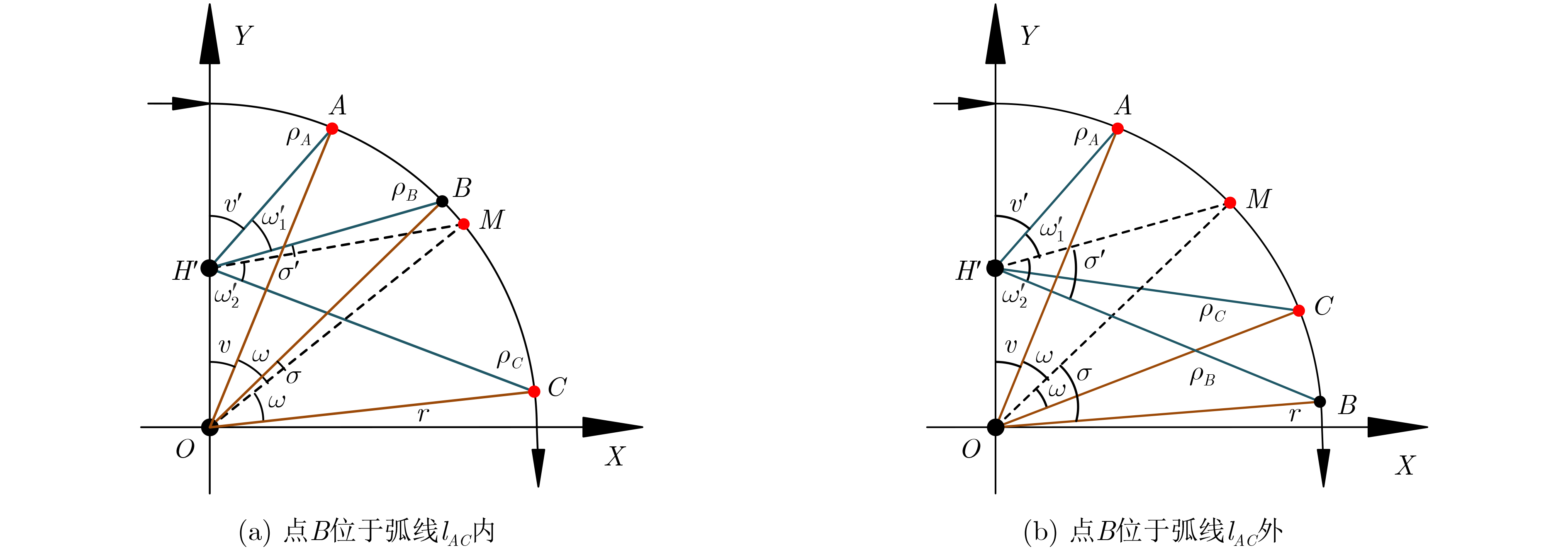
摘要: 针对空中匀速圆弧运动目标激发的水下声信号,该文采用单水听器解决该动目标3维运动参数的估计问题。首先以直升机离散线谱为声源特征,在空气-水介质中建立声源线谱特征在匀速圆弧运动下3维多普勒传播模型。然后根据多普勒频移曲线、声源运动模型以及声线传播几何关系,选取3个时间观测点计算目标多普勒频移,推导了单水听器估计空中匀速圆弧运动声源的3维参数估计算法。最后,通过仿真单水听器所接收的水声信号,验证了该算法估计匀速圆弧运动声源飞行参数的有效性和精度。Abstract: The Three-Dimensional(3D) parameter estimation algorithm of the helicopter with constant speed circular flight from the underwater acoustic data with single hydrophone is proposed. Firstly, the helicopter line spectrum is used as the characteristic of the source, and its 3D Doppler propagation model in two-layer air-water medium is established. Then, the parameters estimation for helicopter in 3D space is derived according to the Doppler frequency shift curve, the sound source motion model and the geometric model of sound propagation. Finally, the effectiveness and accuracy of the algorithm for Doppler signal with the alpha stable noise on single hydrophone is verified.
-
表 1 参数估计结果
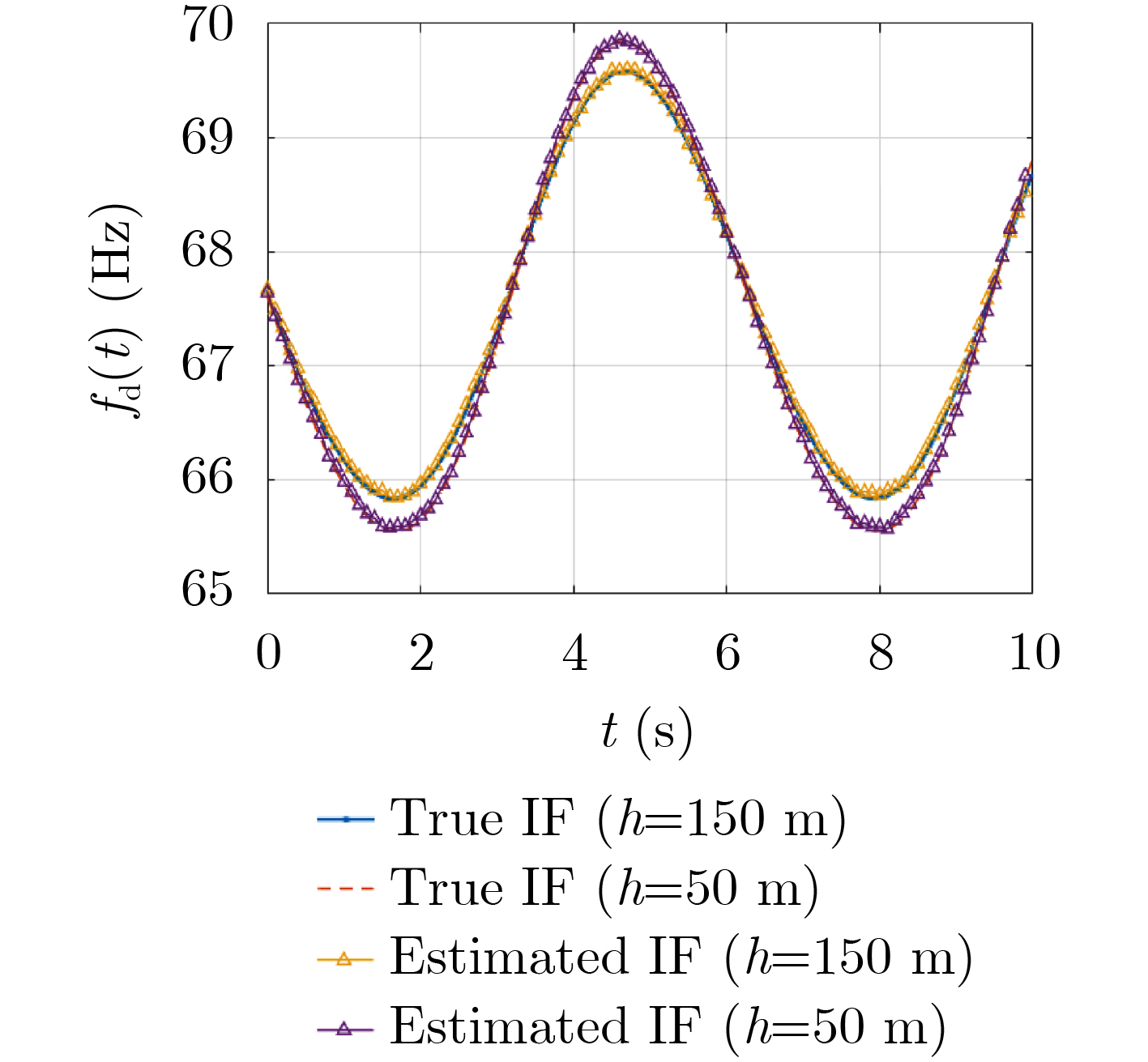
序号 $t$(s) ${f_{\text{d}}}$(Hz) ${f_0}$(Hz) $v$(m/s) $h$(m) $r$(m) 1 $\left. {\begin{array}{*{20}{ll} } { {t_A} = 1.5} \\ { {t_M} = 2} \\ { {t_C} = 2.5} \end{array} } \right\}$ $\left. {\begin{array}{*{20}{lll} } {f\left( { {t_A} } \right) = 67.12} \\ {f\left( { {t_M} } \right) = 67.9} \\ {f\left( { {t_C} } \right) = 68.66} \end{array} } \right\}$ 68.7 119.8 145.6 56 2 $\left. {\begin{array}{*{20}{ll} } { {t_A} = 2.7} \\ { {t_M} = 3.2} \\ { {t_C} = 3.7} \end{array} } \right\}$ $ \left. {\begin{array}{*{20}{llll}} {f\left( {{t_A}} \right) = 68.9} \\ {f\left( {{t_M}} \right) = 69.25} \\ {f\left( {{t_C}} \right) = 69.21} \end{array}} \right\} $ 68.5 120.1 146.8 61 3 $\left. {\begin{array}{*{20}{ll} } { {t_A} = 4} \\ { {t_M} = 4.2} \\ { {t_C} = 4.4} \end{array} } \right\}$ $ \left. {\begin{array}{*{20}{llll}} {f\left( {{t_A}} \right) = 68.99} \\ {f\left( {{t_M}} \right) = 69.79} \\ {f\left( {{t_C}} \right) = 69.56} \end{array}} \right\} $ 67.5 120.8 143.8 58 4 $\left. {\begin{array}{*{20}{ll} } { {t_A} = 3.2} \\ { {t_M} = 3.4} \\ { {t_C} = 3.6} \end{array} } \right\}$ $ \left. {\begin{array}{*{20}{llll}} {f\left( {{t_A}} \right) = 68.25} \\ {f\left( {{t_M}} \right) = 69.3} \\ {f\left( {{t_C}} \right) = 69.24} \end{array}} \right\} $ 68.4 125.2 143.1 34 5 $\left. {\begin{array}{*{20}{lll} } { {t_A} = 1.5} \\ { {t_M} = 2} \\ { {t_C} = 2.5} \end{array} } \right\}$ $ \left. {\begin{array}{*{20}{llll}} {f\left( {{t_A}} \right) = 65.58} \\ {f\left( {{t_M}} \right) = 65.66} \\ {f\left( {{t_C}} \right) = 66.24} \end{array}} \right\} $ 68.2 120.6 48.6 58  下载: 导出CSV
下载: 导出CSV
-
[1] 李浩铭, 鄢社锋, 徐立军, 等. 基于射线声学的水下传感网络静默定位算法[J]. 电子与信息学报, 2021, 43(3): 781–787. doi: 10.11999/JEIT200383LI Haoming, YAN Shefeng, XU Lijun, et al. A silent location algorithm for underwater sensor network based on ray acoustics[J]. Journal of Electronics &Information Technology, 2021, 43(3): 781–787. doi: 10.11999/JEIT200383 [2] 石海杰, 李京华, 陈刚. 水声探空动目标参数测量方法[J]. 系统工程与电子技术, 2021, 43(1): 11–18. doi: 10.3969/j.issn.1001-506X.2021.01.02SHI Haijie, LI Jinghua, and CHEN Gang. Hydroacoustic measurement method of airborne moving target parameters[J]. Systems Engineering and Electronics, 2021, 43(1): 11–18. doi: 10.3969/j.issn.1001-506X.2021.01.02 [3] 刘凯悦, 彭朝晖, 张灵珊, 等. 水下对空中声源的运动参数估计[J]. 应用声学, 2020, 39(2): 236–245. doi: 10.11684/j.issn.1000-310X.2020.02.010LIU Kaiyue, PENG Zhaohui, ZHANG Lingshan, et al. Motion parameters estimation of airborne source from underwater[J]. Journal of Applied Acoustics, 2020, 39(2): 236–245. doi: 10.11684/j.issn.1000-310X.2020.02.010 [4] 王彪, 陈宇, 徐千驰, 等. 非理想条件下基于矢量水听器阵列的一种快速方位估计算法[J]. 电子与信息学报, 2021, 43(3): 745–751. doi: 10.11999/JEIT200541WANG Biao, CHEN Yu, XU Qianchi, et al. A fast direction estimation algorithm based on vector hydrophone array under non-ideal conditions[J]. Journal of Electronics &Information Technology, 2021, 43(3): 745–751. doi: 10.11999/JEIT200541 [5] URICK R J. Noise signature of an aircraft in level flight over a hydrophone in the sea[J]. The Journal of the Acoustical Society of America, 1972, 52(3B): 993–999. doi: 10.1121/1.1913206 [6] FERGUSON B G and SPEECHLEY G C. Acoustic detection and localization of an ASW aircraft by a submarine[J]. The United States Navy Journal of Underwater Acoustics, 1989, 39: 25–41. [7] BOLGHASI A, GHADIMI P, and CHEKAB M A F. Low-frequency sound transmission through rough bubbly air–water interface at the sea surface[J]. Journal of Low Frequency Noise, Vibration and Active Control, 2017, 36(4): 319–338. doi: 10.1177/1461348417744295 [8] PENHALE M and BARNARD A. Direction of arrival estimation in practical scenarios using moving standard deviation processing for localization and tracking with acoustic vector sensors[J]. Applied Acoustics, 2020, 168: 107421. doi: 10.1016/j.apacoust.2020.107421 [9] LO K W. Flight parameter estimation using instantaneous frequency and direction of arrival measurements from a single acoustic sensor node[J]. The Journal of the Acoustical Society of America, 2017, 141(3): 1332–1348. doi: 10.1121/1.4976091 [10] 张华霞, 王惠刚, 孙伟涛, 等. 采用单水听器匀速直线运动直升机三维参数估计算法[EB/OL]. https://www.researchgate.net.2022.6.ZHANG Huaxia, WANG Huigang, SUN Weitao and RONG Shaowei. 3D Parameters Estimation of Helicopter with Constant Speed Using Single Hydr ophone[EB/OL]. https://www. researchgate.net2022.6. [11] SUN Weitao, WANG Huigang, GU Qingyue, et al. Exact frequency estimation in the i. i. d. noise via KL divergence of accumulated power[J]. IEEE Communications Letters, 2021, 25(8): 2574–2578. doi: 10.1109/LCOMM.2021.3077315 [12] SUN Weitao, WANG Huigang, GU Qingyue, et al. Exact and robust time-frequency estimation via accumulation of phase-difference power on multiple log-sum[J]. Journal of Latex Class Files, 14(8): 1–11. [13] LIM J S, PANG H S, and LEE K. Time delay estimation based on log-sum and lp-norm penalized minor component analysis[J]. The Journal of the Acoustical Society of America, 2018, 143(6): 3979–3984. doi: 10.1121/1.5042353 [14] SHEN Y, Fang J, and LI H. Exact Reconstruction Analysis of Log-Sum Minimization for Compressed Sensing[J]. IEEE Signal Processing Letters, 2013, 20(12): 1223–1226. doi: 10.1109/LSP.2013.2285579 [15] FAISAL S and DILIP S. Log-sum distance measures and its application to human-activity monitoring and recognition using data from motion sensors[J]. IEEE Sensors Journal, 2017, 17(14): 4520–4533. doi: 10.1109/JSEN.2017.2707921 -


 下载:
下载:





图(8) / 表(1)
计量
- 文章访问数: 877
- HTML全文浏览量: 441
- PDF下载量: 72
- 被引次数: 0
