

Airborne Global Navigation Satellite System Spoofing Interference Autonomous Detection Algorithm Based on Inertial Navigation System/Distance Measuring Equipment-Aided
-
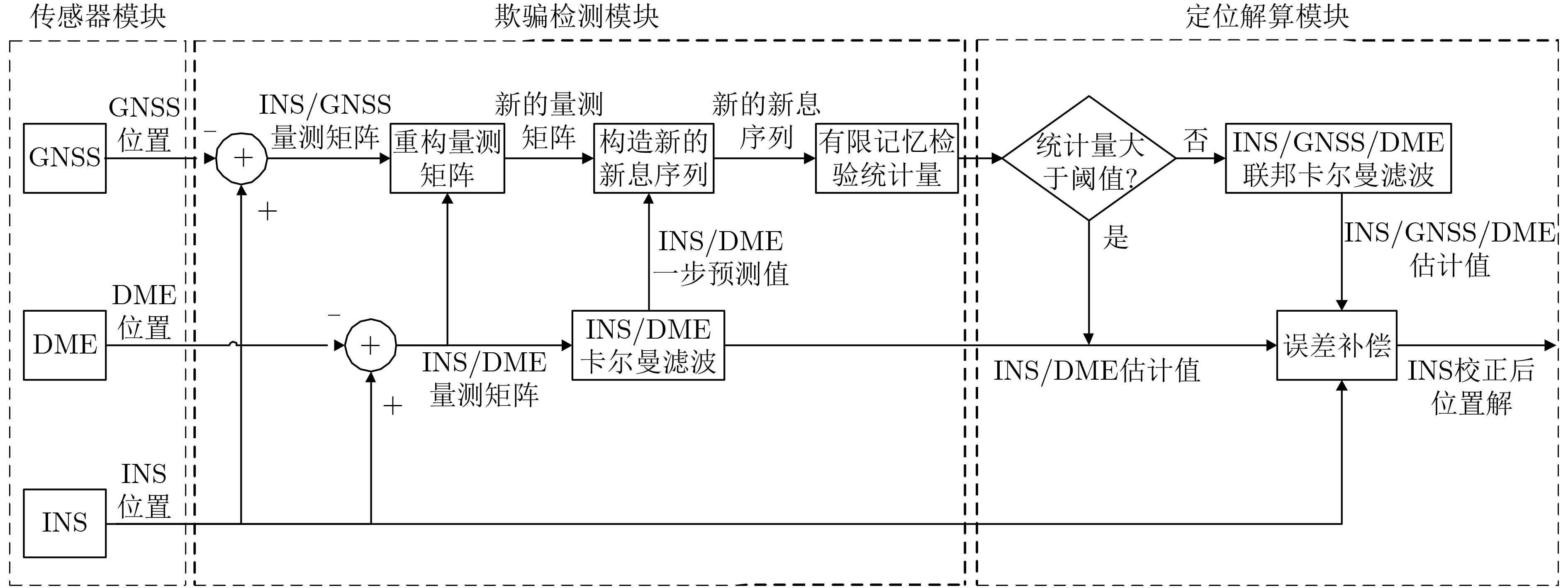
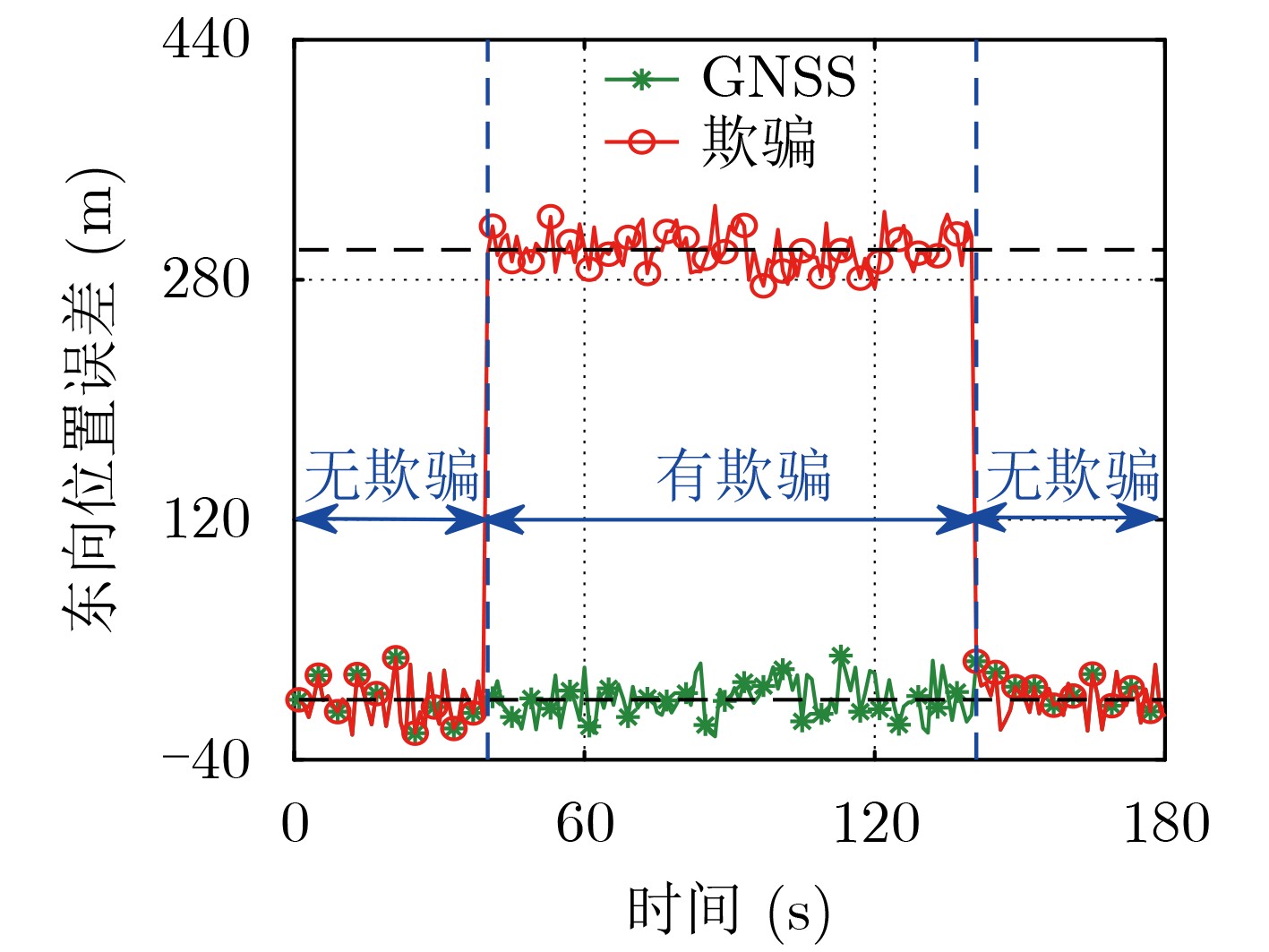
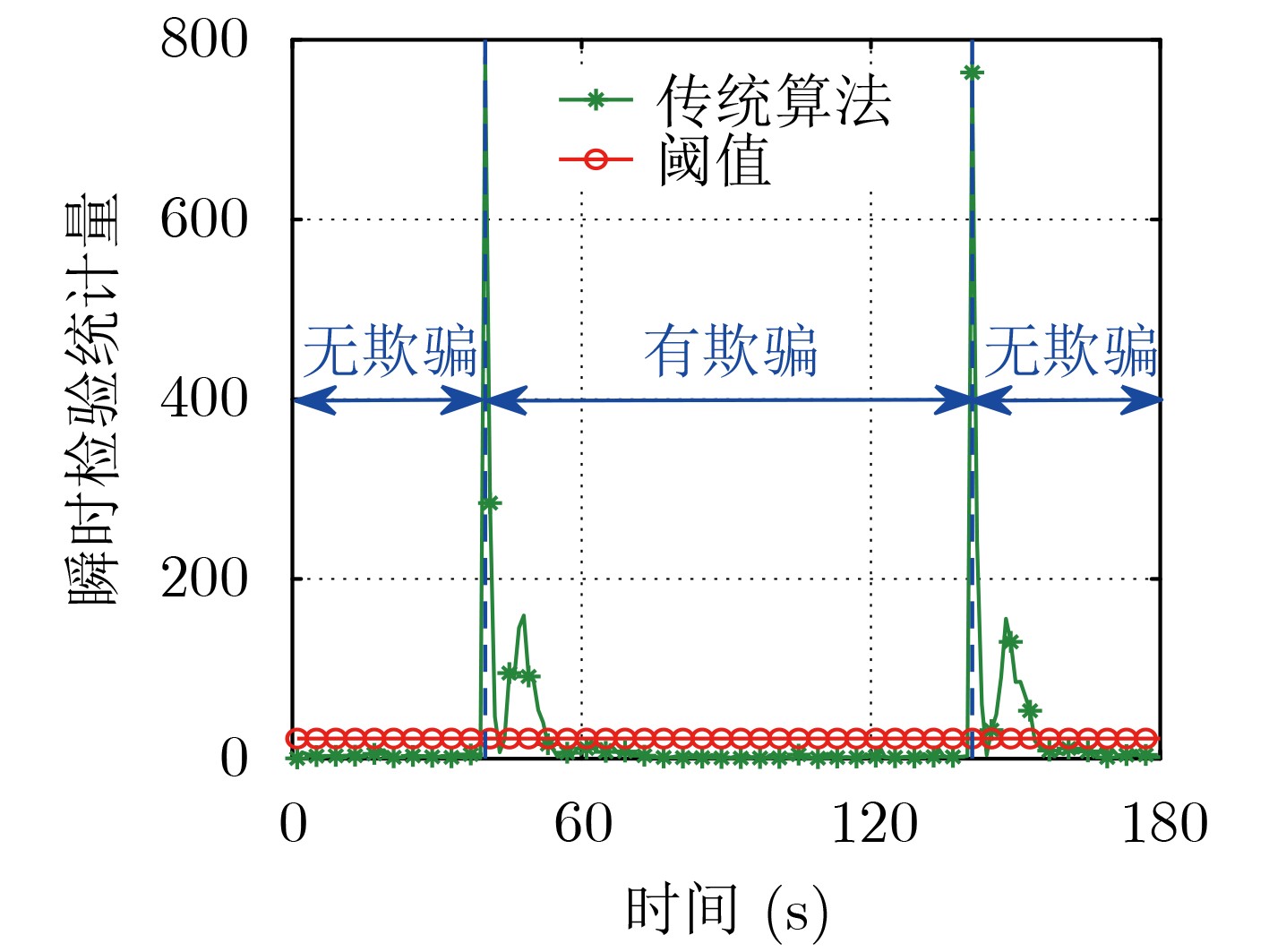
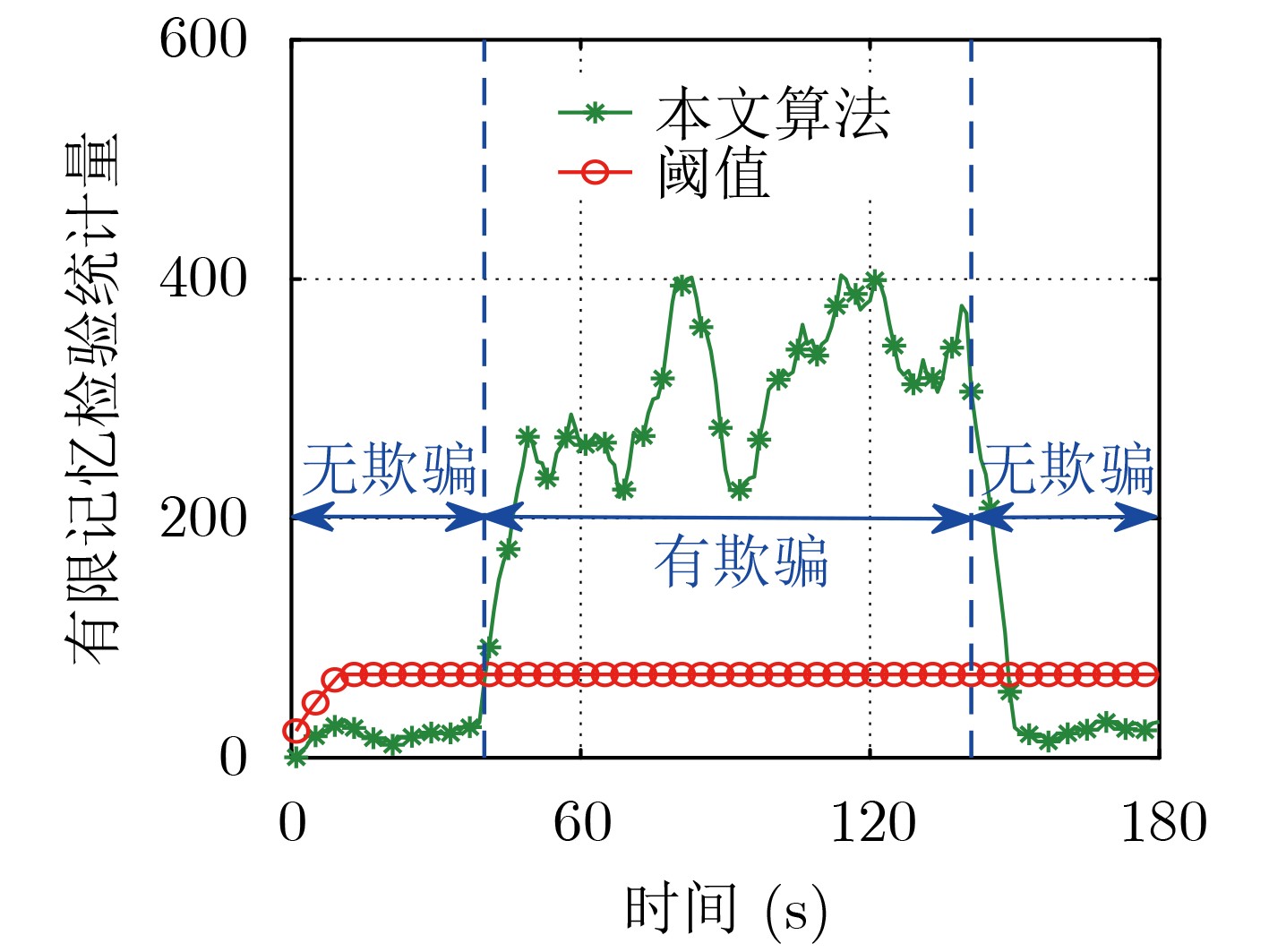
摘要: 全球导航卫星系统(GNSS)欺骗导致目标接收机生成错误的定位结果。利用惯性导航系统(INS)辅助,基于卡尔曼滤波新息序列构造卡方检验统计量是检测机载GNSS欺骗的有效手段。然而,该算法无法给出欺骗的持续时间,从而导致INS/GNSS系统无法依据该算法判断其解算的定位信息是否正确。该文结合测距机系统(DME),提出一种基于重构新息序列的有限记忆卡方检测算法。该算法使用已有的INS,GNSS和DME数据构造一种不参与卡尔曼滤波的新息序列,然后将该新息序列构造成有限记忆卡方检验统计量,从而实现对欺骗式干扰的检测。仿真表明,当机载GNSS欺骗造成250 m及以上的位置偏差时,所设计的算法能够获得较为准确的欺骗持续时间。最后,该文依据所提算法的检测结果,给出了INS/GNSS/DME系统正确的定位信息。Abstract: Global Navigation Satellite System (GNSS) spoofing causes the target receiver to generate incorrect positioning results. Using Inertial Navigation System (INS)-aided, constructing chi-squared test statistics based on the Kalman filter innovation sequence is an effective means to detect airborne GNSS spoofing. However, the algorithm cannot give the spoofing duration, causing the INS/GNSS system could not to determine whether the calculated positioning information is correct based on the algorithm. In this paper, a limited-memory chi-squared detection based on the reconstructed innovation sequence is proposed by using the Distance Measuring Equipment (DME) system. The algorithm uses the existing INS, GNSS and DME data to construct an innovation sequence that does not participate in Kalman filter, and then constructs the innovation sequence into a limited memory chi-square test statistic to detect spoofing interference. When the airborne GNSS spoofing causes a position deviation of 250 m and above, the designed algorithm can obtain a more accurate spoofing duration in simulation part. Finally, this paper gives the correct positioning information of the INS/GNSS/DME system based on the detection result of the proposed algorithm.
-
[1] BATUWANGALA E, RAMASAMY S, BOGODA L, et al. An interoperability assessment model for CNS/ATM systems[C]. The 38th Australasian Transport Research Forum, Melbourne, Australia, 2016: 01627442. [2] WU Zhijun, ZHANG Yun, YANG Yiming, et al. Spoofing and anti-spoofing technologies of global navigation satellite system: A survey[J]. IEEE Access, 2020, 8: 165444–165496. doi: 10.1109/access.2020.3022294 [3] 卢丹, 白天霖. 利用信号重构的全球导航卫星系统欺骗干扰抑制方法[J]. 电子与信息学报, 2020, 42(5): 1268–1273. doi: 10.11999/JEIT190321LU Dan and BAI Tianlin. Global navigation satellite system spoofing mitigation method by utilizing signal reconstruction[J]. Journal of Electronics &Information Technology, 2020, 42(5): 1268–1273. doi: 10.11999/JEIT190321 [4] HORTON E and RANGANATHAN P. Development of a GPS spoofing apparatus to attack a DJI matrice 100 quadcopter[J]. The Journal of Global Positioning Systems, 2018, 16(1): 9. doi: 10.1186/s41445-018-0018-3 [5] HU Yongkang, YANG Dongkai, ZHANG Yiqiang, et al. Development of a software-based IF GPS signal simulator[C]. SPIE 7651, International Conference on Space Information Technology 2009, Beijing, China, 2009. [6] MIRALLES D, BORNOT A, ROUQUETTE P, et al. An assessment of GPS spoofing detection via radio power and signal quality monitoring for aviation safety operations[J]. IEEE Intelligent Transportation Systems Magazine, 2020, 12(3): 136–146. doi: 10.1109/MITS.2020.2994117 [7] KERNS A J, WESSON K D, and HUMPHREYS T E. A blueprint for civil GPS navigation message authentication[C]. 2014 IEEE/ION Position, Location and Navigation Symposium, Monterey, USA, 2014: 262–269. [8] WU Zhijun, ZHANG Yun, LIU Rusen, et al. BD-II NMA&SSI: An scheme of anti-spoofing and open BeiDou II D2 navigation message authentication[J]. IEEE Access, 2020, 8: 23759–23775. doi: 10.1109/access.2020.2970203 [9] HUMPHREYS T E. Detection strategy for cryptographic GNSS anti-spoofing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 1073–1090. doi: 10.1109/TAES.2013.6494400 [10] BROUMANDAN A, JAFARNIA-JAHROMI A, DANESHMAND S, et al. Overview of spatial processing approaches for GNSS structural interference detection and mitigation[J]. Proceedings of the IEEE, 2016, 104(6): 1246–1257. doi: 10.1109/JPROC.2016.2529600 [11] HU Yanfeng, BIAN Shaofeng, LI Bao, et al. A novel array-based spoofing and jamming suppression method for GNSS receiver[J]. IEEE Sensors Journal, 2018, 18(7): 2952–2958. doi: 10.1109/JSEN.2018.2797309 [12] KUJUR B, KHANAFSEH S, PERVAN B, et al. Detecting GNSS spoofing of ADS-B equipped aircraft using INS[C]. 2020 IEEE/ION Position, Location and Navigation Symposium, Portland, USA, 2020: 548–554. [13] 王新龙, 李亚峰, 纪新春. SINS/GPS组合导航技术[M]. 北京: 北京航空航天大学出版社, 2014: 1–22.WANG Xinlong, LI Yafeng, and JI Xinchun. SINS/GPS Zuhe Daohang Jishu[M]. Beijing: Beihang University Press, 2014: 1–22. [14] KUJUR B, KHANAFSEH S, and PERVAN B. A solution separation monitor using INS for detecting GNSS spoofing[C]. The 33rd International Technical Meeting of the Satellite Division of the Institute of Navigation, St. Louis, USA, 2020: 3210–3226. [15] 张泰阁. 基于自适应卡尔曼滤波的GPS抗欺骗干扰方法的研究[D]. [硕士论文], 哈尔滨工程大学, 2018.ZHANG Taige. GPS anti-spoofing method based on adaptive Kalman filter[D]. [Master dissertation], Harbin Engineering University, 2018. [16] LIU Yang, LI Sihai, FU Qiangwen, et al. Analysis of Kalman filter innovation-based GNSS spoofing detection method for INS/GNSS integrated navigation system[J]. IEEE Sensors Journal, 2019, 19(13): 5167–5178. doi: 10.1109/JSEN.2019.2902178 [17] 郭磊. 实际导航性能(ANP)算法研究[D]. [硕士论文], 中国民航大学, 2010.GUO Lei. Research of actual navigation performance (ANP) arithmetic[D]. [Master dissertation], Civil Aviation University of China, 2010. [18] 倪育德, 杜文一. 测距机[M]. 香港: 香港慧文国际出版有限公司, 1999: 1–12.NI Yude and DU Wenyi. Distance Measuring Equipment[M]. Hong Kong, China: The Best Word International Publishing (H. K. ) CO. , Limited, 1999: 1–12. [19] JOERGER M and PERVAN B. Kalman filter-based integrity monitoring against sensor faults[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(2): 349–361. doi: 10.2514/1.59480 [20] 胡东娬, 刘君强, 潘春露. 基于SINS/GPS/CNS的无人机组合导航算法研究[J]. 航空计算技术, 2021, 51(1): 41–45. doi: 10.3969/j.issn.1671-654X.2021.01.010HU Dongbin, LIU Junqiang, and PAN Chunlu. Research on integrated navigation algorithm of UAV based on SINS/GPS/CNS[J]. Aeronautical Computing Technique, 2021, 51(1): 41–45. doi: 10.3969/j.issn.1671-654X.2021.01.010 -

 下载:
下载:






图(8)
计量
- 文章访问数: 1218
- HTML全文浏览量: 785
- PDF下载量: 122
- 被引次数: 0
