

Multistatic Passive Radar Multi-target Tracking Under Target-measurement-illuminator Data Association Uncertainty
-
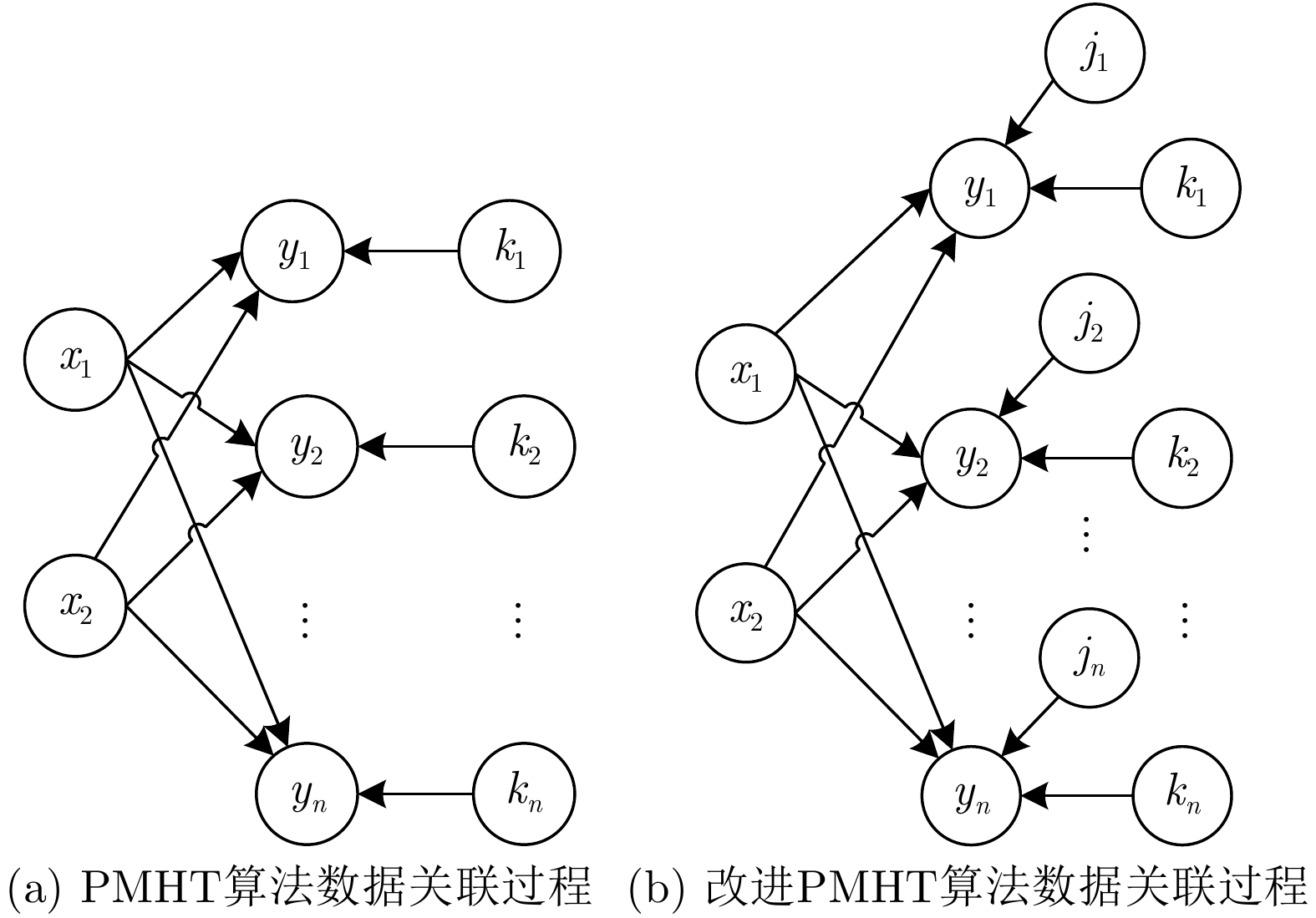
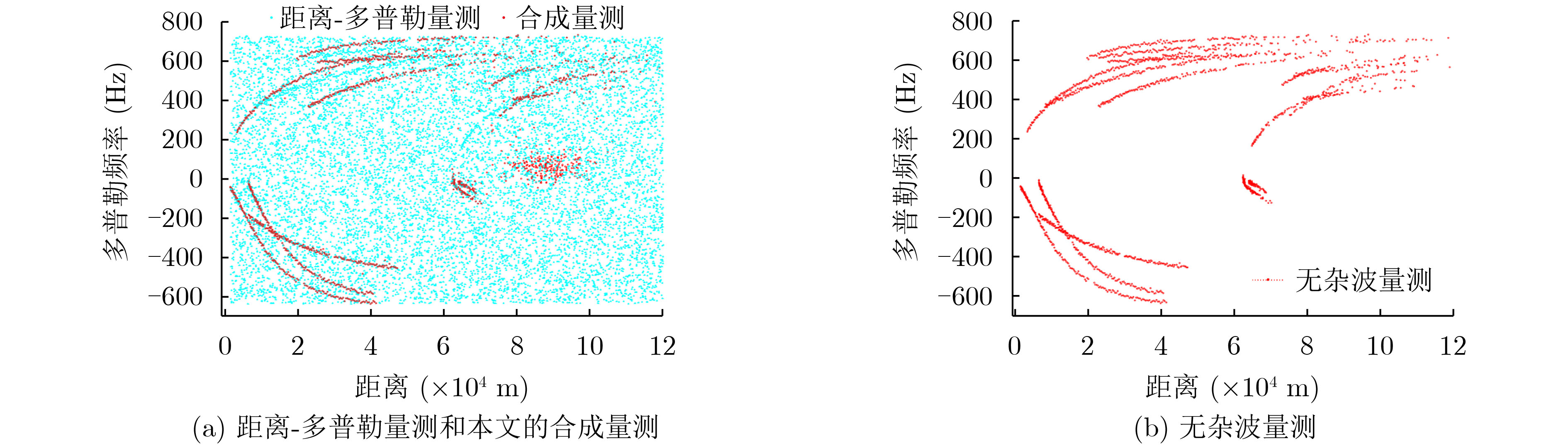
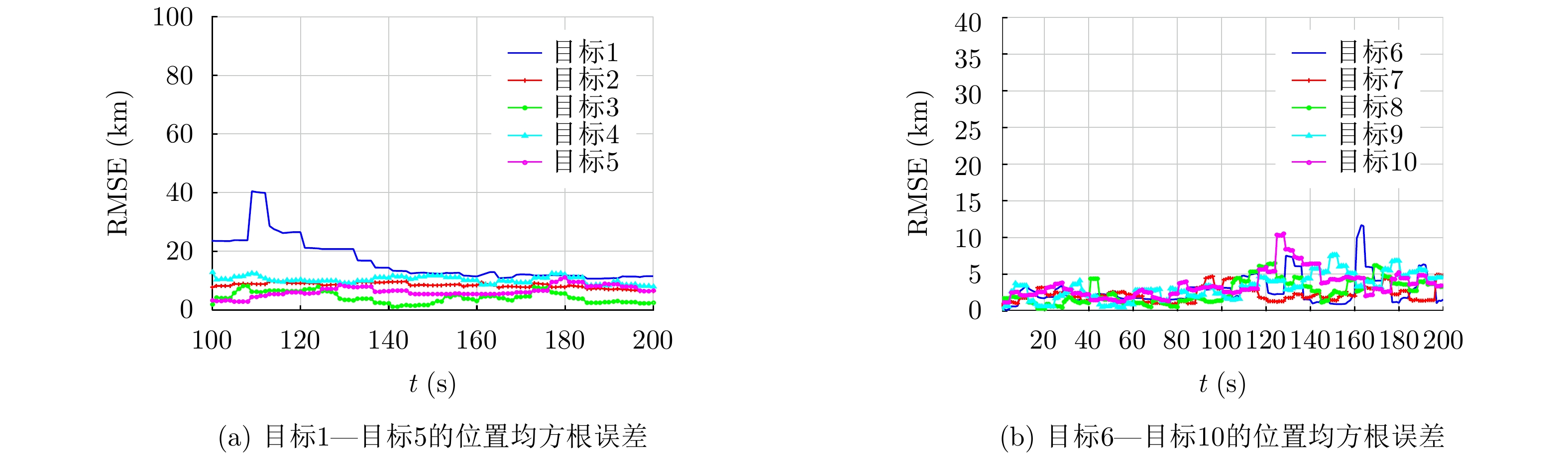
摘要: 不同于传统多目标跟踪,除了量测-目标数据关联模糊问题外,外辐射源雷达跟踪系统新增了量测-发射机数据关联模糊问题。针对此问题,该文通过引入一个新的关联变量来表示量测和发射机之间的数据关联关系,提出了目标-量测-发射机3维数据关联改进概率多假设跟踪(PMHT)算法。该算法利用期望极大化(EM)算法的独立性假设条件得到最大后验概率意义下的最优跟踪。为了增加目标-量测-发射机之间数据关联的准确性,提高多目标与量测后验关联概率的精确度,将量测信息设定为均值相同协方差不同的混合高斯分布。针对距离-多普勒量测的非线性性,利用无味卡尔曼平滑(UKS)算法进行多目标状态估计。仿真结果表明,对于FKIE外辐射源雷达数据集(杂波密度很高),所提算法的目标与航迹关联成功率高,抗杂波性能强,证明了算法的有效性。Abstract: Different from the traditional multi-target tracking problem which has the measurements to targets data association uncertainty problem, the multistatic passive radar multi-target tacking system has the additional measurements to illuminators data association uncertainty problem, which means the data association relationship is three dimensional. A novel target-measurement-illuminator Probabilistic Multiple Hypothesis Tracking (PMHT) algorithm is proposed, which introduces a new data association variable to represent the data association relationship. The proposed algorithm is based on the Expectation-Maximization (EM). To handle the nonlinear problem of range-Doppler measurements, the Unscented Kalman Smoother (UKS) is used to get the multi-targets’ estimated states. To increase the data association accuracy, the measurements are set to mixture Gaussian distribution. Simulation results show that for the FKIE passive radar data set, the proposed algorithm can track multi-targets effectively in dense clutter environment.
-
表 1 目标初始位置和初始速度
目标 初始位置(m) 初始速度(m/s) 目标 初始位置(m) 初始速度(s/m) 1 (–55000, –3498, 890) (200, 10, 0) 6 (5000, –25000, 1890) (–20, –160, 0) 2 (–52500, 12562, 890) (200, –90, 0) 7 (5000, –25000, 1890) (120, –160, 0) 3 (–50000, 33000, 1890) (–200, –100, 0) 8 (43500, 25000, 1890) (–100, –200, 0) 4 (30500, 53000, 890) (–100, –200, 0) 9 (51000, 23000, 1890) (–200, –100, 0) 5 (–30000, –110000, 1890) (160, 100, 0) 10 (10000, –20000, 1890) (80, –190, 0)  下载: 导出CSV
下载: 导出CSV
表 2 本文算法和PMHT算法速度平均均方根误差(m/s)
目标 1 2 3 4 5 6 7 8 9 10 本文算法
PMHT算法0.973
4.2730.897
7.9931.616
4.0421.045
16.331.602
7.5183.452
2.7845.683
2.2371.915
2.6141.955
3.2054.101
3.478
下载: 导出CSV
表 4 10个目标的平均归一化估计误差平方(ANEES)
目标 1 2 3 4 5 6 7 8 9 10 ANEES 4.658 4.261 3.951 3.890 4.953 4.389 4.538 3.964 3.480 4.365
下载: 导出CSV
-
[1] RASHID M and NARAGHI-POUR M. Multi-target delay and Doppler estimation in bistatic passive radar systems[C]. 2021 IEEE Radar Conference, Atlanta, USA, 2021: 1–6. [2] JING Tong, TIAN Wei, HUANG Gaoming, et al. Observability and estimability of passive radar with unknown illuminator states using different observations[J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1193–1205. doi: 10.23919/JSEE.2020.000092 [3] 左燕, 蒋陶然, 陈志猛, 等. 误差校正下单站多外辐射源BR/BRR多目标定位算法[J]. 电子与信息学报, 2021, 43(4): 1162–1169. doi: 10.11999/JEIT200042ZUO Yan, JIANG Taoran, CHEN Zhimeng, et al. BR/BRR passive localization and registration for multiple moving targets in single-observer multi-illuminator radar systems[J]. Journal of Electronics &Information Technology, 2021, 43(4): 1162–1169. doi: 10.11999/JEIT200042 [4] 黄东华, 赵勇胜, 赵拥军, 等. 基于DOA-TDOA-FDOA的单站无源相干定位代数解[J]. 电子与信息学报, 2021, 43(3): 735–744. doi: 10.11999/JEIT200470HUANG Donghua, ZHAO Yongsheng, ZHAO Yongjun, et al. An algebraic solution for single-observer passive coherent location using DOA-TDOA-FDOA measurements[J]. Journal of Electronics &Information Technology, 2021, 43(3): 735–744. doi: 10.11999/JEIT200470 [5] KONOVALOV A A. Target tracking algorithm for passive coherent location[J]. IET Radar, Sonar & Navigation, 2016, 10(7): 1228–1233. [6] AKHTAR A, YONEL B, and YAZICI B. Passive multistatic radar imaging with prior information[C]. 2021 IEEE Radar Conference, Atlanta, USA, 2021: 1–6. [7] GUO Yunfei, THARMARASA R, KIRUBARAJAN T, et al. Passive coherent location with unknown transmitter states[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 148–168. doi: 10.1109/TAES.2017.2649739 [8] 万显荣, 刘玉琪, 程丰, 等. 基于信道分段平滑的外辐射源雷达非平稳杂波抑制方法[J]. 电子与信息学报, 2020, 42(1): 132–139. doi: 10.11999/JEIT190754WAN Xianrong, LIU Yuqi, CHENG Feng, et al. Nonstationary clutter suppression method for passive radar based on channel segmentation and smoothing[J]. Journal of Electronics &Information Technology, 2020, 42(1): 132–139. doi: 10.11999/JEIT190754 [9] YI Jianxin, WAN Xianrong, CHENG Feng, et al. Deghosting for target tracking in single frequency network based passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2655–2668. doi: 10.1109/TAES.2015.130424 [10] CHOI S, CROUSE D F, WILLETT P, et al. Approaches to Cartesian data association passive radar tracking in a DAB/DVB network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 649–663. doi: 10.1109/TAES.2013.120431 [11] BOZDOGAN A O, SOYSAL G, and EFE M. Multistatic tracking using bistatic range-range rate measurements[C]. The 12th International Conference on Information Fusion, Seattle, USA, 2009: 2107–2113. [12] DEMING R, SCHINDLER J, and PERLOVSKY L. Multi-target/multi-sensor tracking using only range and Doppler measurements[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(2): 593–611. doi: 10.1109/TAES.2009.5089543 [13] 吴伟, 王东进, 陈卫东. 基于动态多维分配的多基地雷达多目标跟踪算法[J]. 中国科学技术大学学报, 2006, 36(11): 1143–1147, 1152. doi: 10.3969/j.issn.0253-2778.2006.11.003WU Wei, WANG Dongjin, and CHEN Weidong. Multi-target tracking algorithm for multi-static radar based on dynamic multi-dimension assignment[J]. Journal of University of Science and Technology of China, 2006, 36(11): 1143–1147, 1152. doi: 10.3969/j.issn.0253-2778.2006.11.003 [14] SANTHI L R, GOPI S, and JOHN A. Adaptive switching between JPDA and set JPDA algorithms based on validation gates[C]. 2015 International Conference on Control Communication & Computing, Trivandrum, India, 2015: 42–47. [15] ZHENG Le and WANG Xiaodong. Improved multiple hypothesis tracker for joint multiple target tracking and feature extraction[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(6): 3080–3089. doi: 10.1109/TAES.2019.2897035 [16] DAUN M and KOCH W. Multistatic target tracking for non-cooperative illumination by DAB/DVB-T[C]. 2008 IEEE Radar Conference, Rome, Italy, 2008. [17] DAUN M, NICKEL U, and KOCH W. Tracking in multistatic passive radar systems using DAB/DVB-T illumination[J]. Signal Processing, 2012, 92(6): 1365–1386. doi: 10.1016/j.sigpro.2011.09.005 [18] TOBIAS M and LANTERMAN A D. Probability hypothesis density-based multitarget tracking with bistatic range and Doppler observations[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(3): 195–205. doi: 10.1049/ip-rsn:20045031 [19] PIKORA K and EHLERS F. Analysis of the FKIE passive radar data set with GMPHD and GMCPHD[C]. The 16th International Conference on Information Fusion, Istanbul, Turkey, 2013: 272–279. [20] 杨威, 付耀文, 龙建乾, 等. 基于有限集统计学理论的目标跟踪技术研究综述[J]. 电子学报, 2012, 40(7): 1440–1448.YANG Wei, FU Yaowen, LONG Jianqian, et al. The FISST-based target tracking techniques: A survey[J]. Acta Electronica Sinica, 2012, 40(7): 1440–1448. [21] GAETJENS H X, DAVEY S J, and LUGINBUHL T E. A tale of three priors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(3): 1633–1645. doi: 10.1109/TAES.2021.3054057 [22] 杨威, 付耀文, 潘晓刚, 等. 弱目标检测前跟踪技术研究综述[J]. 电子学报, 2014, 42(9): 1786–1793. doi: 10.3969/j.issn.0372-2112.2014.09.019YANG Wei, FU Yaowen, PAN Xiaogang, et al. Track-before-detect technique for dim targets: An overview[J]. Acta Electronica Sinica, 2014, 42(9): 1786–1793. doi: 10.3969/j.issn.0372-2112.2014.09.019 [23] DAVEY S J. Efficient histogram PMHT via single target Chip processing[J]. IEEE Signal Processing Letters, 2015, 22(5): 569–572. doi: 10.1109/LSP.2014.2364300 [24] LI Xiaohua, WILLETT P, BAUM M, et al. PMHT approach for underwater bearing-only multisensor-multitarget tracking in clutter[J]. IEEE Journal of Oceanic Engineering, 2016, 41(4): 831–839. doi: 10.1109/JOE.2015.2506220 [25] LEXA M, CORALUPPI S, CARTHEL C, et al. Distributed MHT and ML-PMHT approaches to multi-sensor passive sonar tracking[C]. 2020 IEEE Aerospace Conference, Big Sky, USA, 2020: 1–12. [26] 王磊, 程向红, 李双喜. 高斯和高阶无迹卡尔曼滤波算法[J]. 电子学报, 2017, 45(2): 424–430. doi: 10.3969/j.issn.0372-2112.2017.02.022WANG Lei, CHENG Xianghong, and LI Shuangxi. Gaussian sum high order unscented Kalman filtering algorithm[J]. Acta Electronica Sinica, 2017, 45(2): 424–430. doi: 10.3969/j.issn.0372-2112.2017.02.022 [27] SINGH A K. Major development under Gaussian filtering since unscented Kalman filter[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(5): 1308–1325. [28] LI X R and ZHAO Zhanlue. Evaluation of estimation algorithms part I: Incomprehensive measures of performance[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(4): 1340–1358. doi: 10.1109/TAES.2006.314576 [29] LI X R and ZHAO Zhanlue. Measures of performance for evaluation of estimators and filters[C]. SPIE 4473, Signal and Data Processing of Small Targets 2001, San Diego, USA, 2001: 530–541. -

 下载:
下载:




图(6) / 表(4)
计量
- 文章访问数: 1448
- HTML全文浏览量: 790
- PDF下载量: 91
- 被引次数: 0
