

Analytical Expression of the Time-Frequency Features of the Near-Field and Far-Field Micro-Motion Echo Based on Local Scattering Centers
-
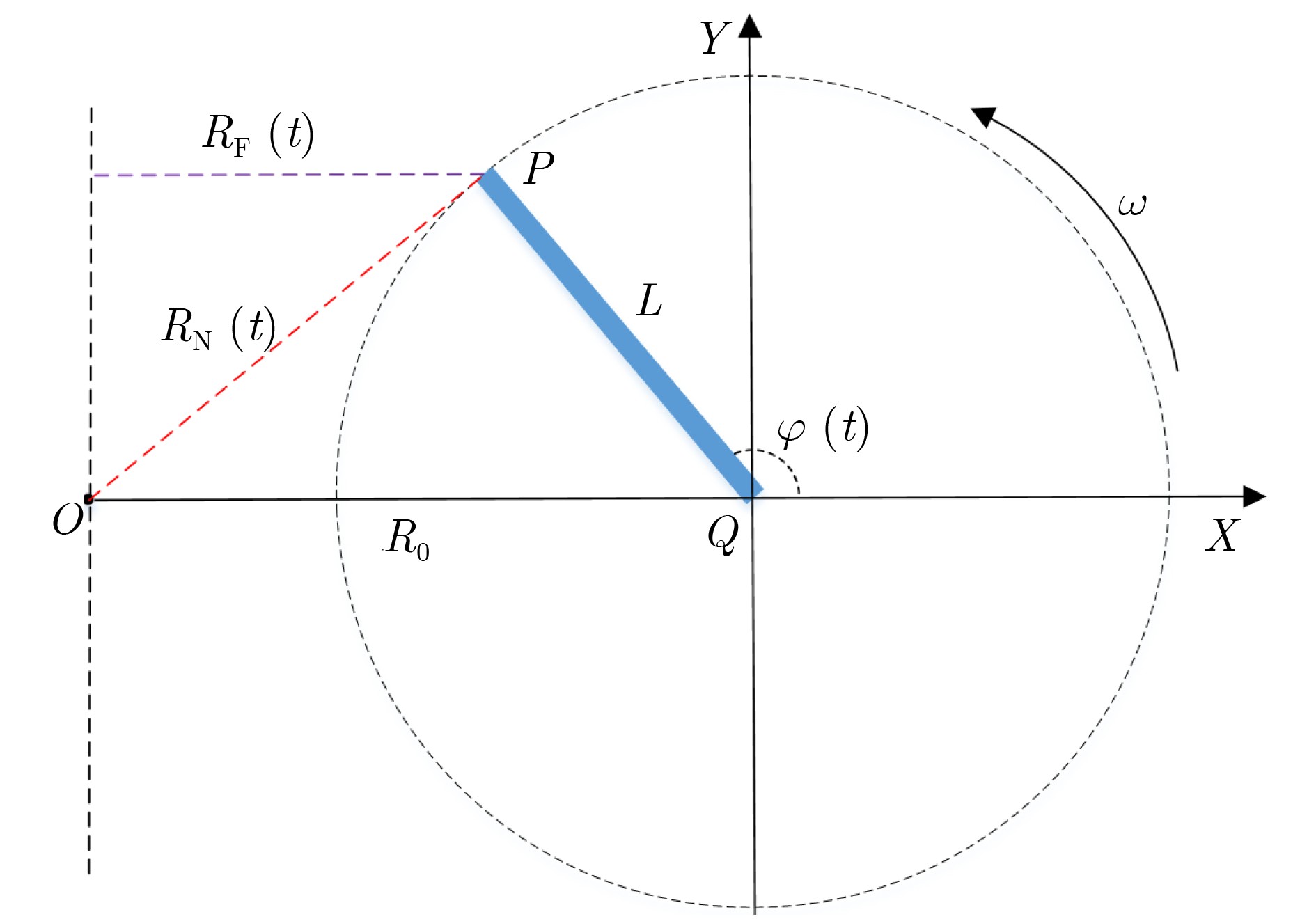
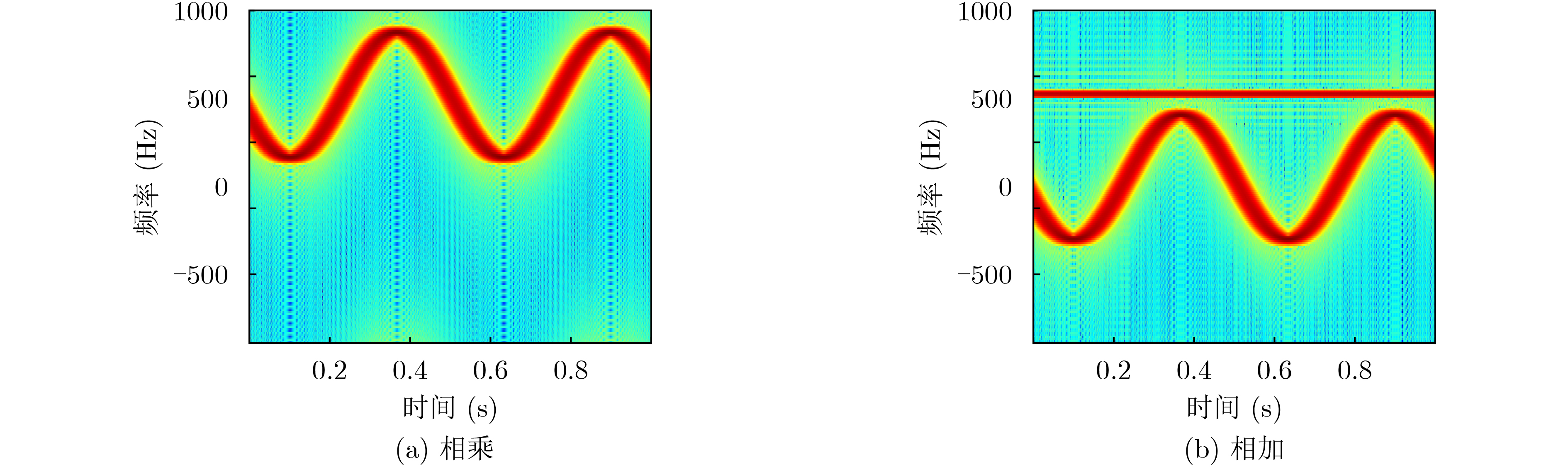
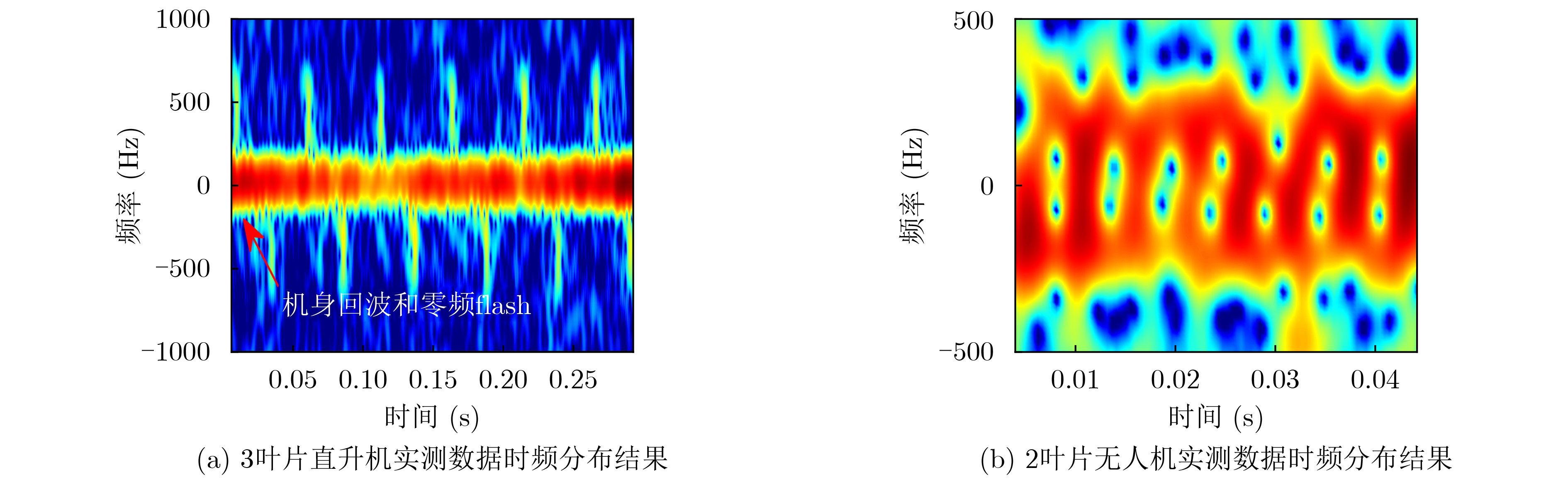
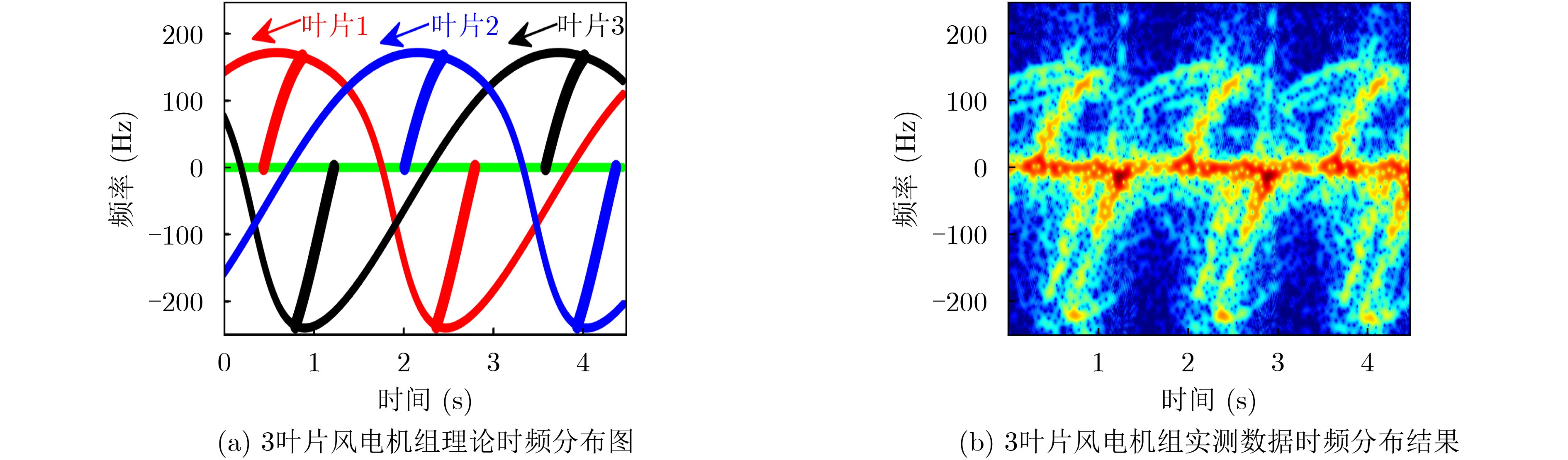
摘要: 微多普勒效应是由目标(或其部件)的转动、振动、进动等微动引起的频率调制现象,能够反映目标的几何结构和运动状态。该文全面分析了近、远场探测条件下目标扇叶转动引起的微动回波的时频分布特性。首先建立了近、远场雷达微动回波模型。然后从远场微动回波模型中推导其瞬时频率表达式,结果表明远场微动回波的时频图中包含由叶尖散射点、叶彀散射点和镜面反射点引入的正弦型flash、零频flash和矩形flash。最后,在近场条件下,直接推导得到上述3类局部散射点的瞬时频率表达式,表明近场微动回波时频图呈现类正弦型flash,零频flash和部分余弦型flash的组合。该文还从积分运算性质和电磁散射理论两方面解释了上述flash的形成机理,揭示了它们与扇叶数目、尺寸、转速等参数之间的关系。该文结果将有助于目标精细化建模、分类识别等应用。仿真和实测数据结果均证明了分析结果的正确性。Abstract: Micro-Doppler effect is a frequency modulation phenomenon caused by the rotation, vibration, precession or other micro-motions of targets (or their components), which is able to reflect the geometric structure and motion state of the target. In this paper, the time-frequency distribution characteristics of micro motion echo induced by the rotation of target fan blades under near-field and far-field conditions are analyzed comprehensively. First, the signal models of the near-field and far-field radar micro motion echo are established. Then, the instantaneous frequencies are derived from the signal model of the far-field micro motion echo. The results show that the spectrogram of the far-field micro motion echo is composed of the sinusoidal flashes, zero-frequency flash, and rectangular flashes induced by the tip scattering points, hub scattering points, and mirror reflection points, respectively. Finally, the instantaneous frequencies corresponding to the above three kinds of local scattering points under near-field condition are directly derived, which indicates that the spectrogram of the near-field micro motion echo behaves as the combination of the sine-like flashes, zero-frequency flash, and partial cosine flashes. The formation mechanisms about the above flashes are explained from the perspectives of the integral operation properties and electromagnetic scattering theories. Also, the relationship between the flashes and the number, size, rotation velocity of the blades is revealed. This paper will be helpful to the applications of target fine modeling, target classification and recognition. The correctness of the analyses is validated by simulated and field experimental data.
-
Key words:
- Radar /
- Micro-Doppler effect /
- Micro-motion /
- Time-frequency features /
- Near-field detection
-
表 1 实验配置及目标参数
直升机 无人机 ${f_0} = 658{\text{ MHz}}$ ${f_0} = 658{\text{ MHz}}$ ${R_0} = 2500{\text{ m}}$ ${R_0} = 309{\text{ m}}$ $L = 5{\text{ m}}$ $L = 17.25{\text{ cm}}$ $\omega = 406{\text{ r/min} }$ $\omega = 5100{\text{ r/min} }$ $K = 3$ $ K=2\text{ }(4对) $ $\beta = {40.02^ \circ }$ $\beta = {56.95^ \circ }$ $\delta = {13.82^ \circ }$ $\delta = {1.40^ \circ }$  下载: 导出CSV
下载: 导出CSV
-
[1] CHEN V C, LI F, HO S S, et al. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. doi: 10.1109/TAES.2006.1603402 [2] 张群, 胡健, 罗迎, 等. 微动目标雷达特征提取、成像与识别研究进展[J]. 雷达学报, 2018, 7(5): 531–547. doi: 10.12000/JR18049ZHANG Qun, HU Jian, LUO Ying, et al. Research progresses in radar feature extraction, imaging, and recognition of target with micro-motions[J]. Journal of Radars, 2018, 7(5): 531–547. doi: 10.12000/JR18049 [3] 苏宁远, 陈小龙, 关键, 等. 基于卷积神经网络的海上微动目标检测与分类方法[J]. 雷达学报, 2018, 7(5): 565–574. doi: 10.12000/JR18077SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565–574. doi: 10.12000/JR18077 [4] CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radon-linear canonical ambiguity function-based detection and estimation method for marine target with micromotion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(4): 2225–2240. doi: 10.1109/TGRS.2014.2358456 [5] LI Gang, ZHANG Rui, RITCHIE M, et al. Sparsity-driven micro-Doppler feature extraction for dynamic hand gesture recognition[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(2): 655–665. doi: 10.1109/TAES.2017.2761229 [6] ZHU Lingzhi, ZHANG Shuning, XU Shenan, et al. Classification of UAV-to-ground targets based on Micro-Doppler fractal features using IEEMD and GA-BP neural network[J]. IEEE Sensors Journal, 2020, 20(1): 348–358. doi: 10.1109/JSEN.2019.2942081 [7] SUN Yingxiang, ABEYWICKRAMA S, JAYASINGHE L, et al. Micro-Doppler signature-based detection, classification, and localization of small UAV with long short-term memory neural network[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(8): 6285–6300. doi: 10.1109/TGRS.2020.3028654 [8] LI Xinyu, HE Yuan, FIORANELLI F, et al. Human motion recognition with limited radar micro-Doppler signatures[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(8): 6586–6599. doi: 10.1109/TGRS.2020.3028223 [9] PANG Cunsuo, HAN Yan, HOU Huiling, et al. Micro-Doppler signal time-frequency algorithm based on STFRFT[J]. Sensors, 2016, 16(10): 1559. doi: 10.3390/s16101559 [10] LI Wenchao, XIONG Boli, and KUANG Gangyao. Micro-Doppler parameter estimation based on improved time-frequency analysis[C]. Proceedings of the 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 2017: 1–4. [11] WHITELONIS N and LING Hao. Radar signature analysis using a joint time-frequency distribution based on compressed sensing[J]. IEEE Transactions on Antennas and Propagation, 2014, 62(2): 755–763. doi: 10.1109/TAP.2013.2291893 [12] BIENKOWSKI P and TRZASKA H. Electromagnetic Measurements in the Near Field[M]. 2nd ed. Raleigh: SciTech Pub. , 2012. [13] CLEMENTE C and SORAGHAN J J. GNSS-based passive bistatic radar for micro-Doppler analysis of helicopter rotor blades[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 491–500. doi: 10.1109/TAES.2013.120018 [14] GARRY J L and SMITH G E. Experimental observations of micro-Doppler signatures with passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(2): 1045–1052. doi: 10.1109/TAES.2019.2895584 [15] 马娇, 董勇伟, 李原, 等. 多旋翼无人机微多普勒特性分析与特征提取[J]. 中国科学院大学学报, 2019, 36(2): 235–243. doi: 10.7523/j.issn.2095-6134.2019.02.011MA Jiao, DONG Yongwei, LI Yuan, et al. Multi-rotor UAV’s micro-Doppler characteristic analysis and feature extraction[J]. Journal of University of Chinese Academy of Sciences, 2019, 36(2): 235–243. doi: 10.7523/j.issn.2095-6134.2019.02.011 [16] 何炜琨, 孙景波, 王晓亮, 等. 基于RSP-CFD方法的小型旋翼无人机微动特征提取[J]. 信号处理, 2021, 37(3): 399–408. doi: 10.16798/j.issn.1003-0530.2021.03.010HE Weikun, SUN Jingbo, WANG Xiaoliang, et al. Micro-motion feature extraction of micro-rotor UAV based on RSP-CFD method[J]. Journal of Signal Processing, 2021, 37(3): 399–408. doi: 10.16798/j.issn.1003-0530.2021.03.010 [17] 陈小龙, 南钊, 张海, 等. 飞鸟与旋翼无人机雷达微多普勒测量实验研究[J]. 电波科学学报, 2021, 36(5): 704–714. doi: 10.12265/j.cjors.2020192CHEN Xiaolong, NAN Zhao, ZHANG Hai, et al. Experimental research on radar micro-Doppler of flying bird and rotor UAV[J]. Chinese Journal of Radio Science, 2021, 36(5): 704–714. doi: 10.12265/j.cjors.2020192 [18] 陈永彬, 李少东, 杨军, 等. 旋翼叶片回波建模与闪烁现象机理分析[J]. 物理学报, 2016, 65(13): 138401. doi: 10.7498/aps.65.138401CHEN Yongbin, LI Shaodong, YANG Jun, et al. Rotor blades echo modeling and mechanism analysis of flashes phenomena[J]. Acta Physica Sinica, 2016, 65(13): 138401. doi: 10.7498/aps.65.138401 [19] NIKOUBIN T, MUÑOZ-FERRERAS J, GÓMEZ-GARCÍA R, et al. Structural health monitoring of wind turbines using a low-cost portable k-band radar: An ab-initio field investigation[C]. Proceedings of 2015 IEEE Topical Conference on Wireless Sensors and Sensor Networks (WiSNet), San Diego, USA, 2015: 69–71, [20] ZHAO Heng, CHEN Geng, HONG Hong, et al. Remote structural health monitoring for industrial wind turbines using short-range Doppler radar[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 8002609. doi: 10.1109/TIM.2021.3053959 [21] VAN LIL E, TRAPPENIERS D, DE BLESER J W, et al. Computations of radar returns of wind turbines[C]. Proceedings of the 3rd European Conference on Antennas and Propagation, Berlin, Germany, 2009: 3852–3856. [22] BEAUCHAMP R M and CHANDRASEKAR V. Suppressing wind turbine signatures in weather radar observations[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(5): 2546–2562. doi: 10.1109/TGRS.2016.2647604 [23] NAQVI A, YANG Shangte, and LING Hao. Investigation of Doppler features from wind turbine scattering[J]. IEEE Antennas and Wireless Propagation Letters, 2010, 9: 485–488. doi: 10.1109/LAWP.2010.2050672 [24] CRESPO-BALLESTEROS M, ANTONIOU M, and CHERNIAKOV M. Wind turbine blade radar signatures in the near field: Modeling and experimental confirmation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1916–1931. doi: 10.1109/TAES.2017.2675241 [25] BOASHASH B. Estimating and interpreting the instantaneous frequency of a signal. I. Fundamentals[J]. Proceedings of the IEEE, 1992, 80(4): 520–538. doi: 10.1109/5.135376 [26] BOASHASH B. Estimating and interpreting the instantaneous frequency of a signal. II. Algorithms and applications[J]. Proceedings of the IEEE, 1992, 80(4): 540–568. doi: 10.1109/5.135378 [27] 张麟兮, 李南京, 胡楚锋, 等. 雷达目标散射特性测试与成像诊断[M]. 北京: 中国宇航出版社, 2009. [28] WAN Xianrong, YI Jianxin, ZHAO Zhixin, et al. Experimental research for CMMB-based passive radar under a multipath environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(1): 70–85. doi: 10.1109/TAES.2013.120737 [29] 万显荣, 邵启红, 夏鹏, 等. 数字地面多媒体广播外辐射源雷达微多普勒效应实验[J]. 系统工程与电子技术, 2016, 38(11): 2499–2504. doi: 10.3969/j.issn.1001-506X.2016.11.08WAN Xianrong, SHAO Qihong, XIA Peng, et al. Experimentation on micro-Doppler effect with passive radar based on digital terrestrial multimedia broadcasting[J]. Systems Engineering and Electronics, 2016, 38(11): 2499–2504. doi: 10.3969/j.issn.1001-506X.2016.11.08 -

 下载:
下载:








图(9) / 表(1)
计量
- 文章访问数: 1042
- HTML全文浏览量: 598
- PDF下载量: 72
- 被引次数: 0
