

Reconfigurable Circularly Polarized End-fire Antenna Design Based on Butterfly Dipoles
-
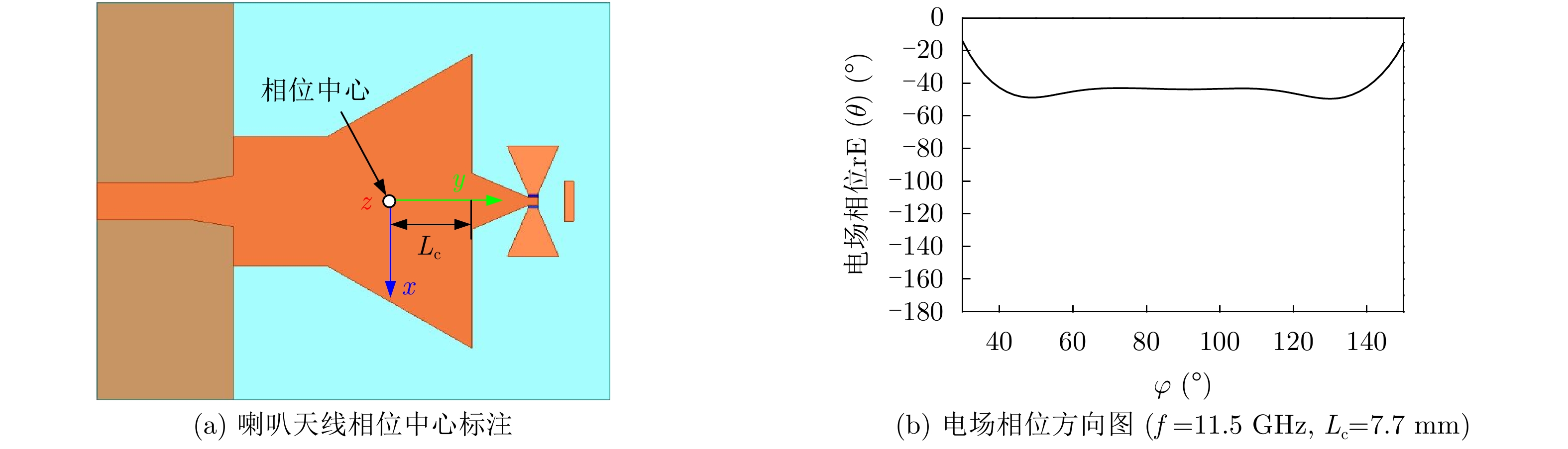
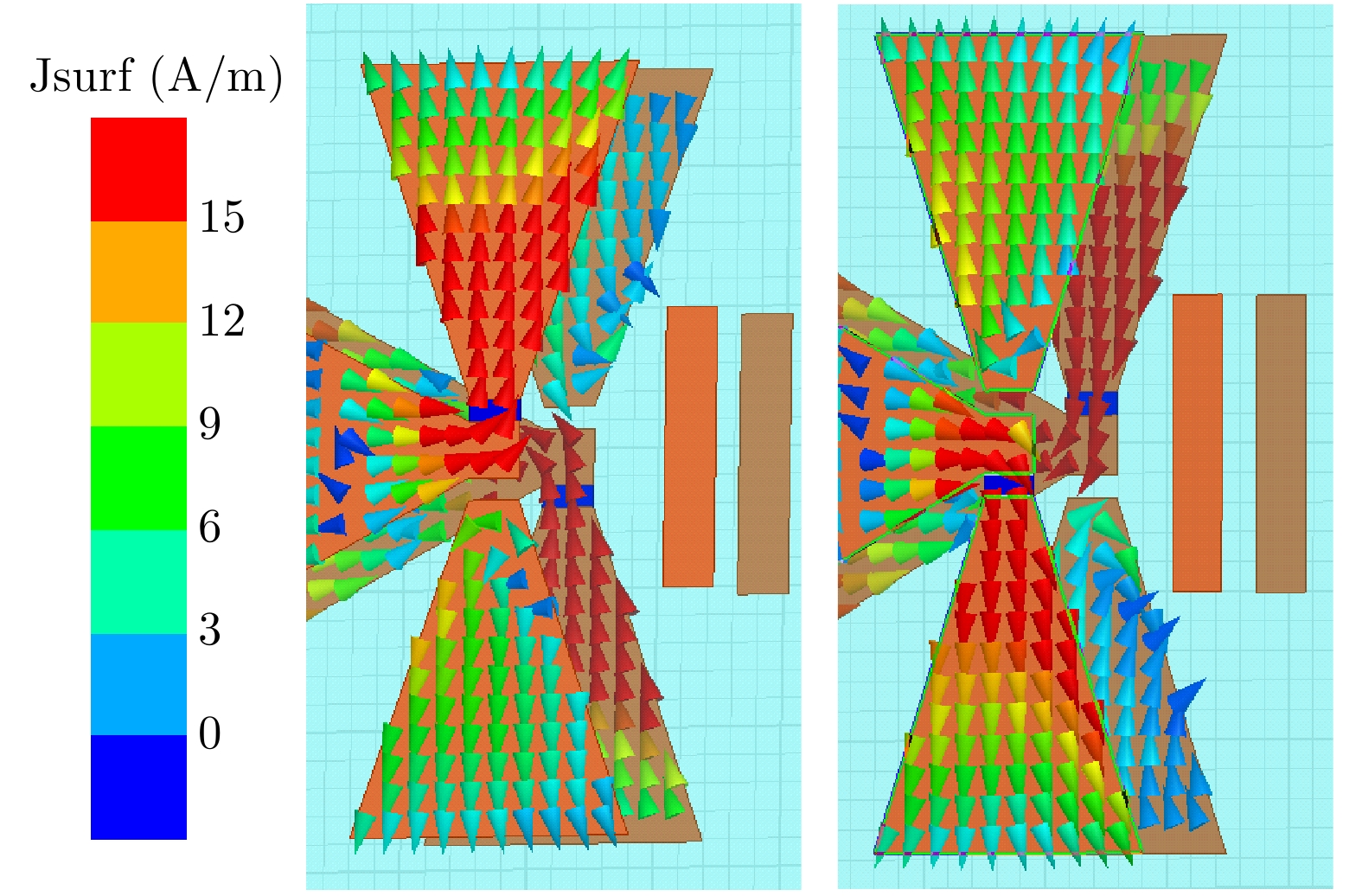
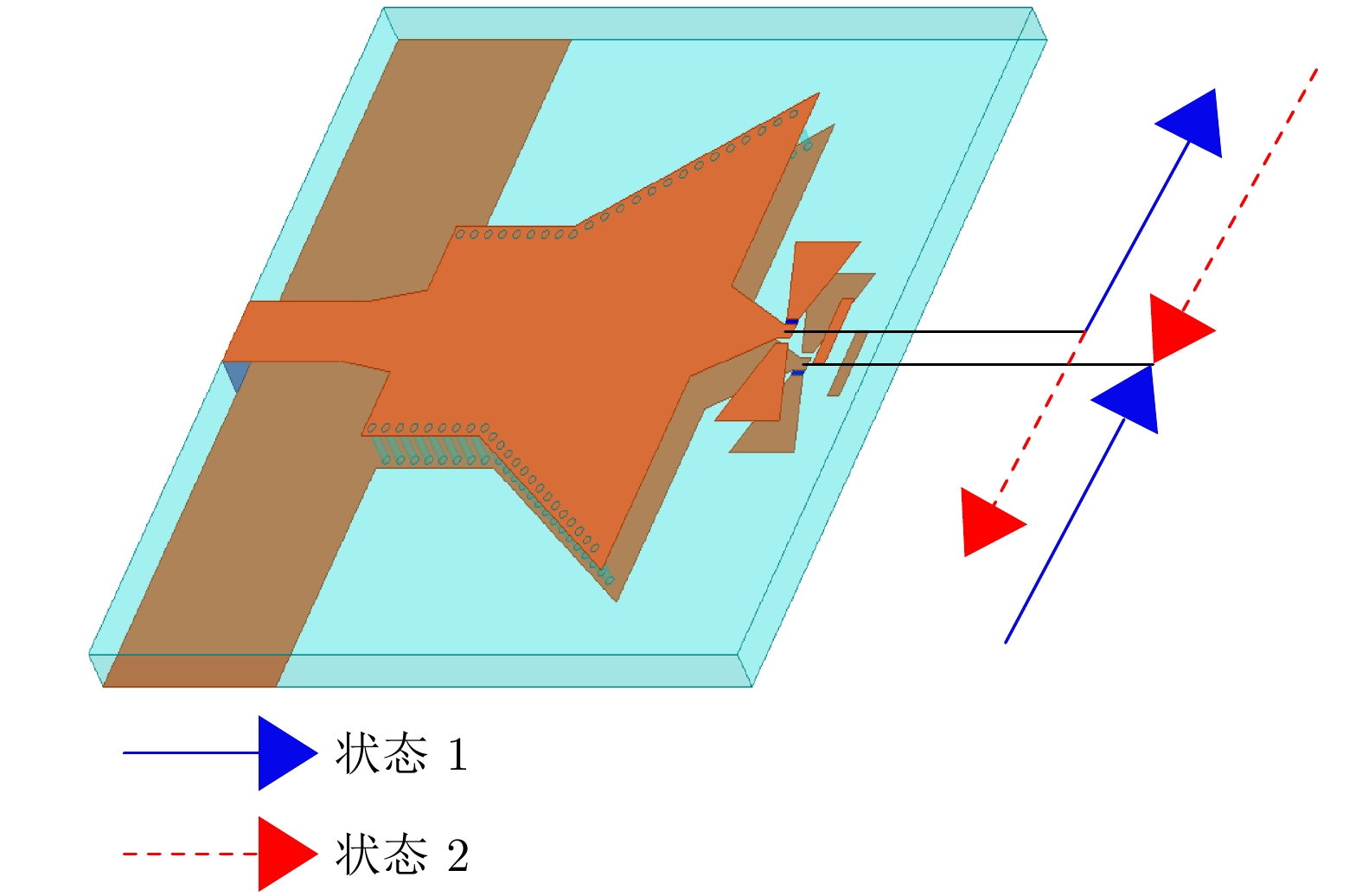
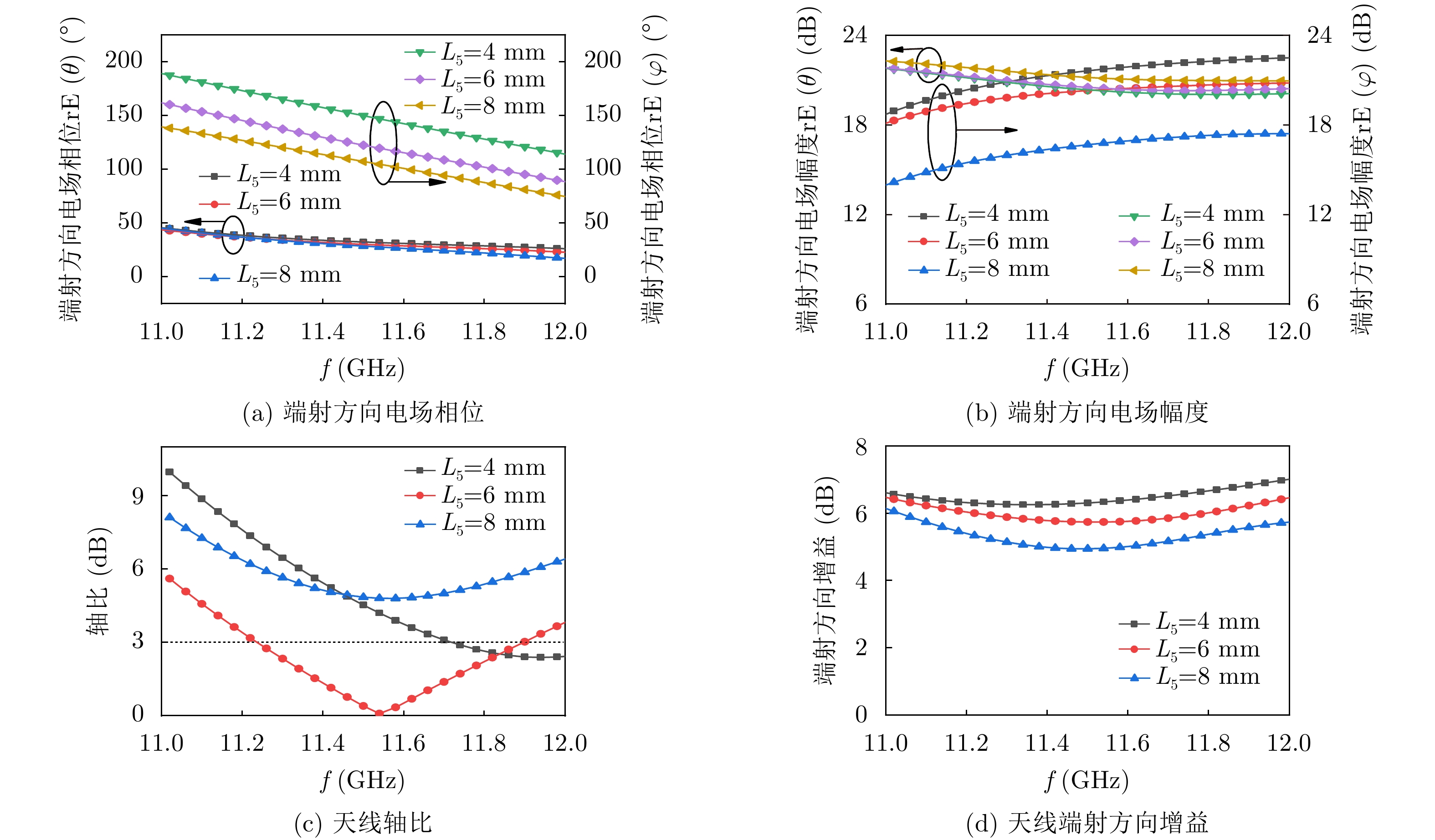
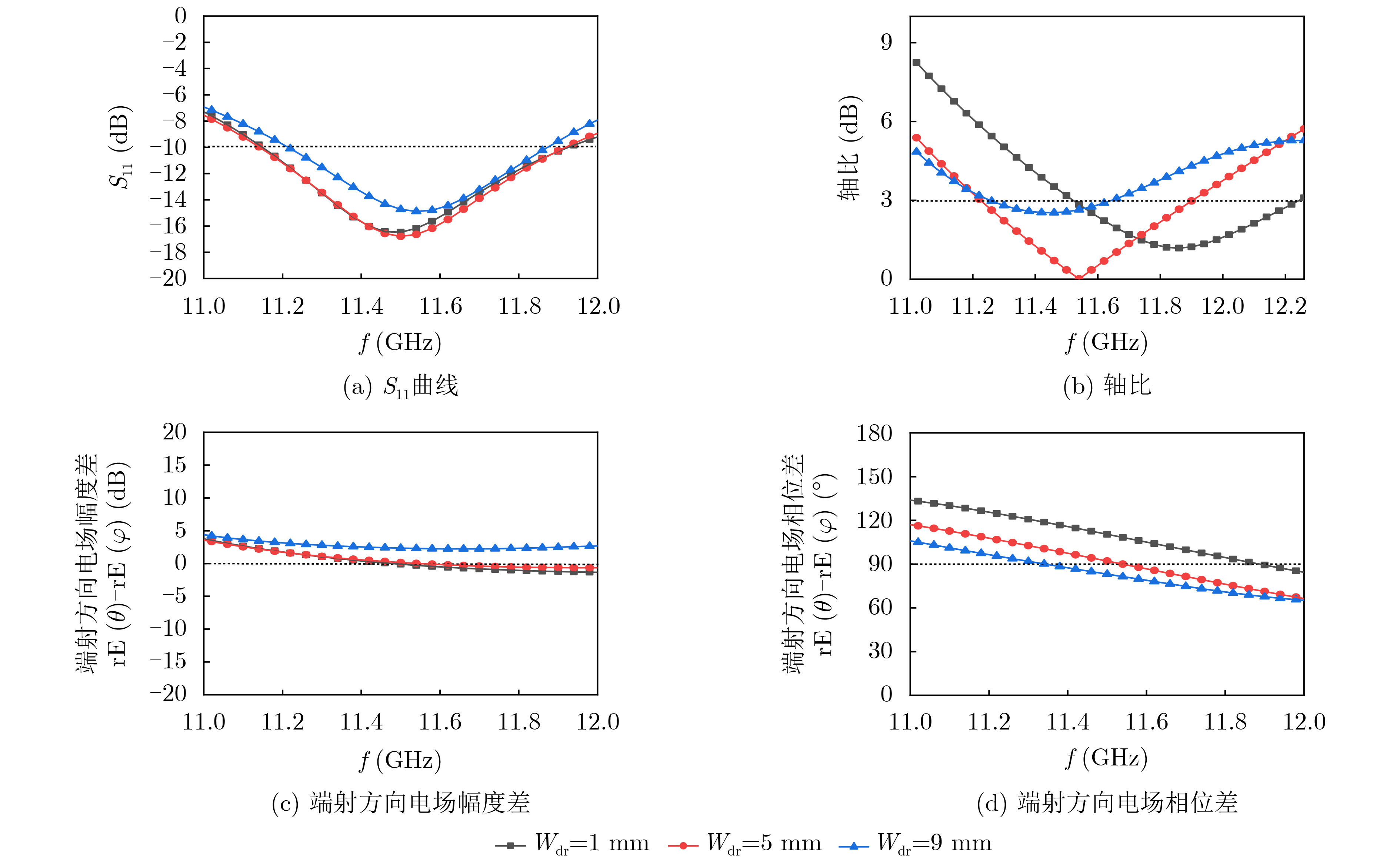
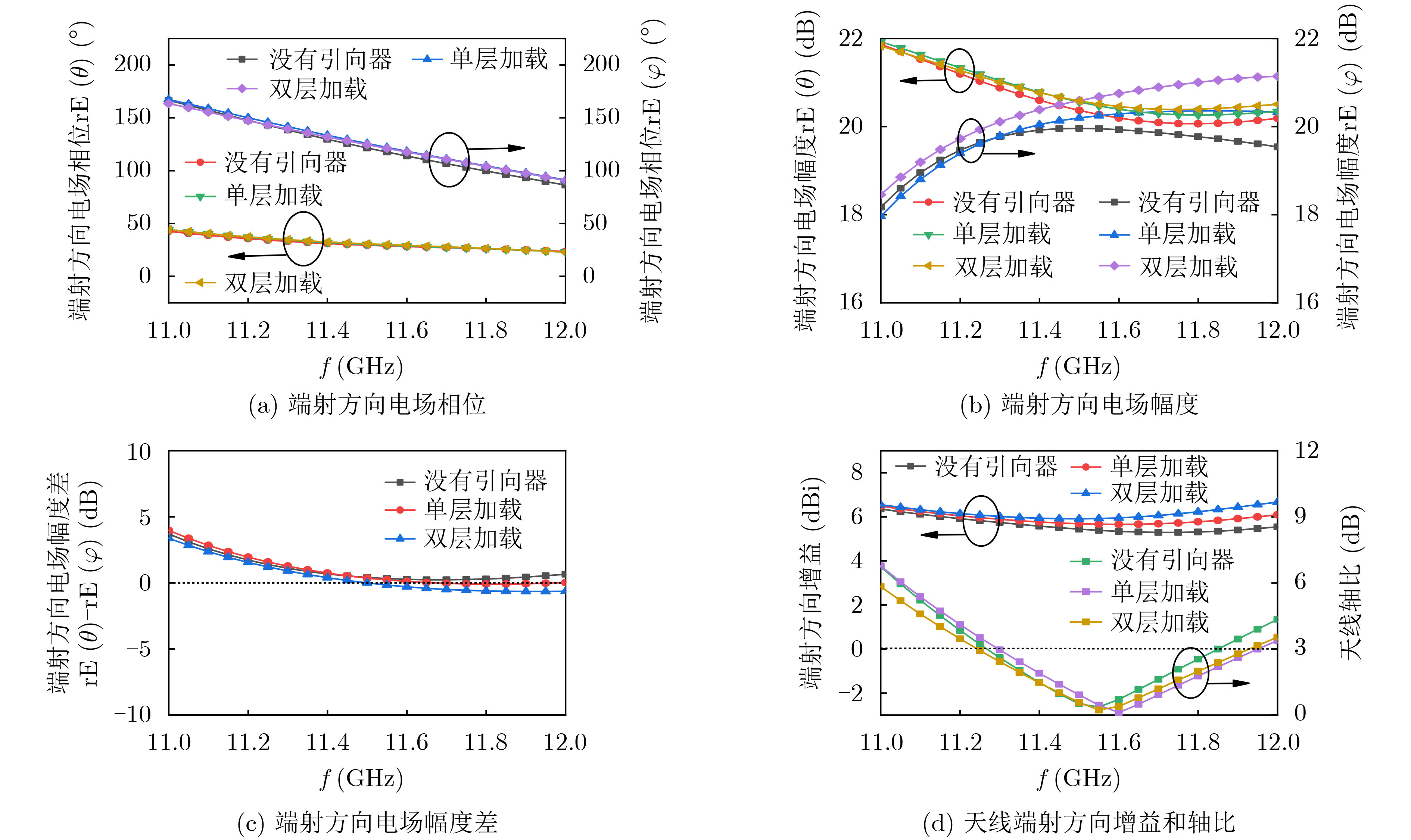
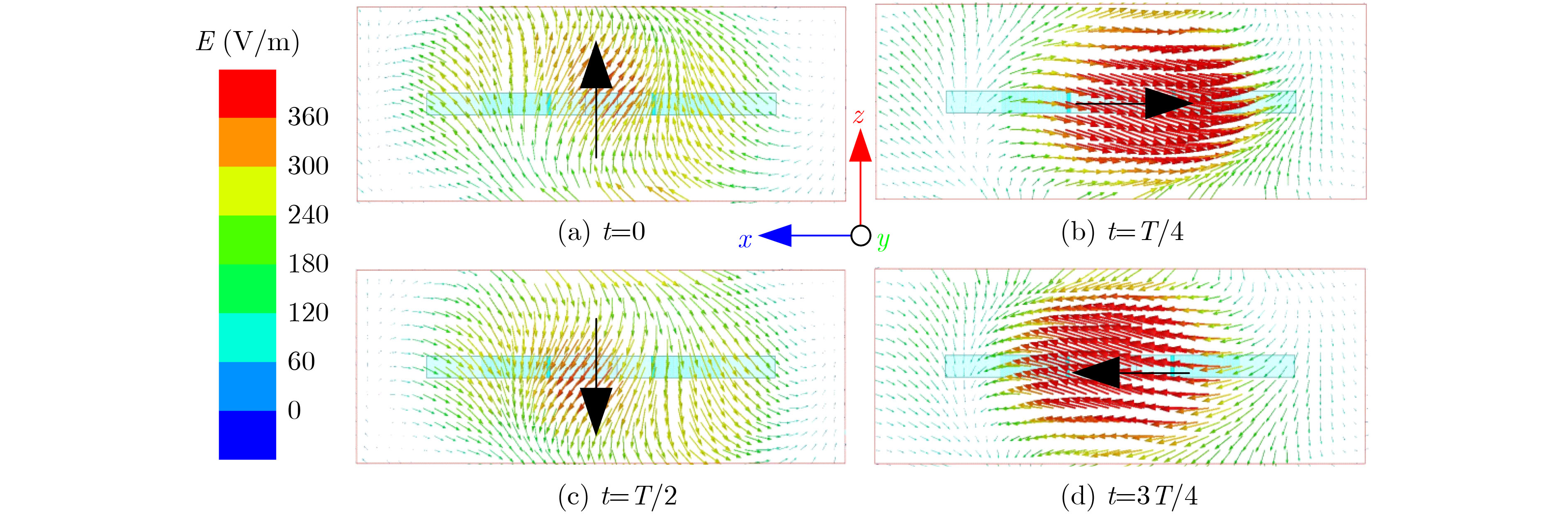
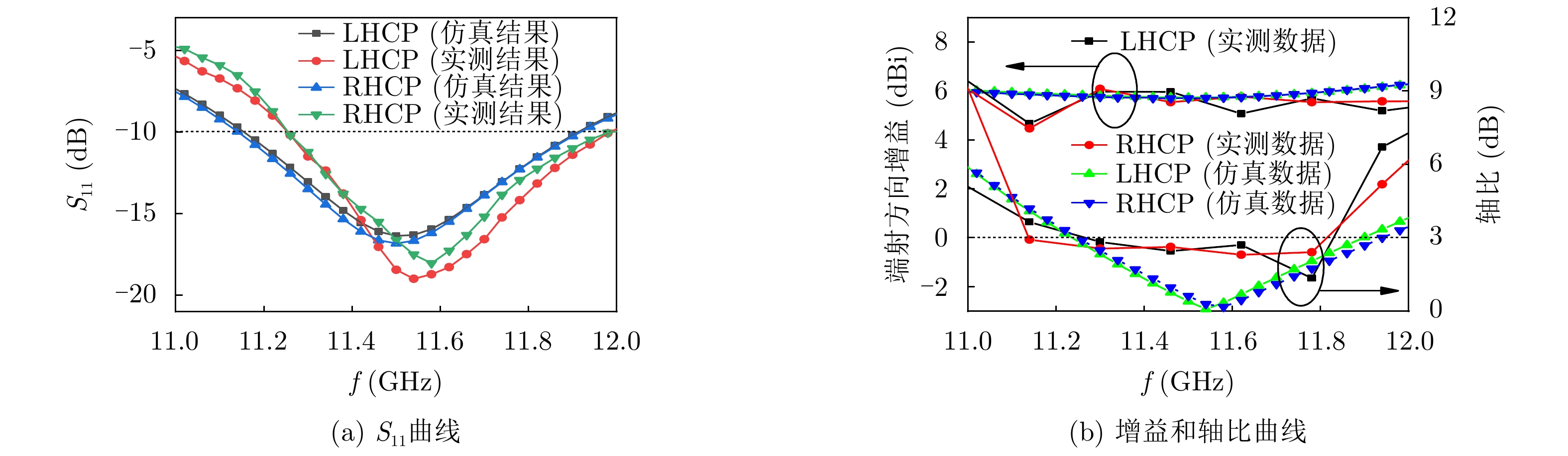
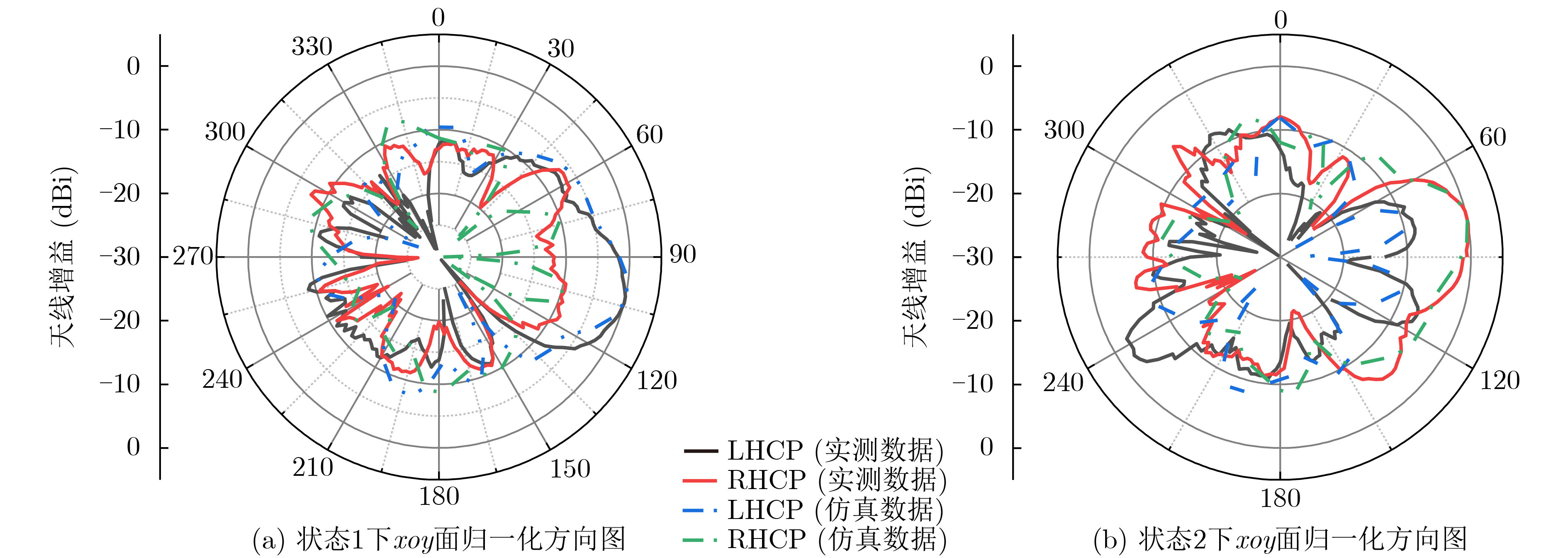
摘要: 为了降低天线对载体气动力学的破坏,提高天线在复杂电磁环境中的性能,该文设计了一款圆极化方式可重构的端射天线。该天线以基片集成波导(SIW)喇叭天线为原型,在喇叭前端加载移相器和蝶形振子,上下蝶形振子之间加载了4个MEMS开关,开关的导通与断开,可以控制电流的流动路径,从而使天线分别辐射两种圆极化波。实测结果表明,通过控制开关的通断组合,设计的天线可以在11.24~11.83 GHz频段内沿端射方向辐射左旋圆极化(LHCP)或右旋圆极化(RHCP)电磁波。测量结果和仿真结果基本吻合,验证了设计的有效性。Abstract: In order to reduce the damage to carrier aerodynamics by the antenna and improve the performance of the antenna in a complex electromagnetic environment, this paper designs a circularly polarized reconfigurable end-fire antenna. The antenna is based on the Substrate Integrated Waveguide (SIW) horn antenna. The front end of the horn is loaded with a phase shifter and butterfly dipoles, and four MEMS switches are loaded between the upper and lower butterfly dipoles. The current flow path can be controlled by the on and off of the switch, so that the antenna radiates two circularly polarized waves respectively. The measured results show that by controlling the on-off combination of the switch, the designed antenna can radiate Left-Hand Circular Polarization (LHCP) or Right-Hand Circular Polarization (RHCP) electromagnetic waves in the 11.24~11.83 GHz frequency band along the end-fire direction. The measurement results are basically consistent with the simulation results, verifying the effectiveness of the design.
-
Key words:
- End-fire antenna /
- Circular polarization /
- Polarization reconfigurable
-
表 2 优化后的单元尺寸(mm)
单元 a b L1 L2 L3 L4 L5 W1 W2 W3 数值 50 55 10 4.65 10 15.6 6 4.64 6.35 15 单元 W4 W5 D1 D2 Ldr Wdr D3 Ld Wd 数值 37 7 1 1 6 5 2.87 5 1  下载: 导出CSV
下载: 导出CSV
-
[1] 薛正辉, 刘姜玲, 曹佳. 端射天线[M]. 北京: 电子工业出版社, 2015: 2–4.XUE Zhenghui, LIU Jiangling, and CAO Jia. Endfire Antenna[M]. Beijing: Publishing House of Electronics Industry, 2015: 2–4. [2] YE Mao, LI Xinrong, and CHU Qingxin. Single-layer circularly polarized antenna with fan-beam endfire radiation[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 20–23. doi: 10.1109/LAWP.2016.2552490 [3] LU Wenjun, WANG Kang, GU Shanshan, et al. Directivity enhancement of planar endfire circularly polarized antenna using V-shaped 1.5-wavelength dipoles[J]. IEEE Antennas and Wireless Propagation Letters, 2019, 18(7): 1420–1423. doi: 10.1109/LAWP.2019.2918505 [4] LU Wenjun, SHI Jingwen, TONG K F, et al. Planar endfire circularly polarized antenna using combined magnetic dipoles[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14: 1263–1266. doi: 10.1109/LAWP.2015.2401576 [5] YOU Man, LU Wenjun, XUE Bai, et al. A novel planar endfire circularly polarized antenna with wide axial-ratio beamwidth and wide impedance bandwidth[J]. IEEE Transactions on Antennas and Propagation, 2016, 64(10): 4554–4559. doi: 10.1109/TAP.2016.2593929 [6] YE Mao, LI Xinrong, and CHU Qingxin. Single-layer single-fed endfire antenna with bidirectional circularly polarized radiation of the same sense[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 621–624. doi: 10.1109/LAWP.2016.2594186 [7] CHU Qingxin, YE Mao, and LI Xinrong. A low-profile omnidirectional circularly polarized antenna using planar sector-shaped endfire elements[J]. IEEE Transactions on Antennas and Propagation, 2017, 65(5): 2240–2247. doi: 10.1109/TAP.2017.2679481 [8] DONG Gaoya, WANG Weimin, and LIU Yuanan. A planar end-fire circularly polarized complementary Yagi antenna[J]. Microwave and Optical Technology Letters, 2019, 61(7): 1889–1894. doi: 10.1002/mop.31819 [9] LI Min, WANG Rong, YAO Heming, et al. A low-profile wideband CP end-fire magnetoelectric antenna using dual-mode resonances[J]. IEEE Transactions on Antennas and Propagation, 2019, 67(7): 4445–4452. doi: 10.1109/TAP.2019.2911399 [10] HESARI S S and BORNEMANN J. Wideband circularly polarized substrate integrated waveguide endfire antenna system with high gain[J]. IEEE Antennas and Wireless Propagation Letters, 2017, 16: 2262–2265. doi: 10.1109/LAWP.2017.2713720 [11] WANG Ankang, YANG Lin, ZHANG Yu, et al. A novel planar dual circularly polarized endfire antenna[J]. IEEE Access, 2019, 7: 64297–64302. doi: 10.1109/ACCESS.2019.2915996 [12] RUAN Xuexuan and CHAN Chihou. An endfire circularly polarized complementary antenna array for 5G applications[J]. IEEE Transactions on Antennas and Propagation, 2020, 68(1): 266–274. doi: 10.1109/TAP.2019.2934888 [13] YAO Yali, ZHANG Fushun, and ZHANG Fan. Microstrip fed planar endfire circularly polarised antenna with enhanced bandwidth[J]. Electronics Letters, 2017, 53(7): 445–446. doi: 10.1049/el.2017.0237 [14] CHENG Xiaohe, YAO Yuan, HIROKAWA J, et al. Analysis and design of a wideband endfire circularly polarized septum antenna[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(11): 5783–5793. doi: 10.1109/TAP.2018.2866584 [15] CHENG Xiaohe, YAO Yuan, CHEN Zhijiao, et al. Compact wideband circularly polarized antipodal curvedly tapered slot antenna[J]. IEEE Antennas and Wireless Propagation Letters, 2018, 17(4): 666–669. doi: 10.1109/LAWP.2018.2810861 [16] WANG Jingxue, LI Yujian, GE Lei, et al. Millimeter-wave wideband circularly polarized planar complementary source antenna with endfire radiation[J]. IEEE Transactions on Antennas and Propagation, 2018, 66(7): 3317–3326. doi: 10.1109/TAP.2018.2829824 [17] WU Qi, WANG Haiming, HONG Wei, et al. Millimeter-wave broadband multi-beam end-fire dual circularly polarized antenna array[C]. 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, USA, 2018: 823–824. doi: 10.1109/APUSNCURSINRSM.2018.8608247. [18] XIA Feiyang, CHENG Yujian, WU Yafei, et al. V-band wideband circularly polarized endfire multibeam antenna with wide beam coverage[J]. IEEE Antennas and Wireless Propagation Letters, 2019, 18(8): 1616–1620. doi: 10.1109/LAWP.2019.2925375 [19] YAN Yangdong, JIAO Yongchang, and ZHANG Chi. A circularly polarized-reconfigurable planar end-fire antenna with bidirectional radiation of same sense and wide beamwidth[J]. International Journal of RF and Microwave Computer-Aided Engineering, 2020, 30(12): e22469. doi: 10.1002/mmce.22469 [20] HU Jun, HAO Zhangcheng, FAN Kuikui, et al. A bidirectional same sense circularly polarized endfire antenna array with polarization reconfigurability[J]. IEEE Transactions on Antennas and Propagation, 2019, 67(11): 7150–7155. doi: 10.1109/TAP.2019.2934900 [21] WANG Lei, JIAO Yongchang, and WENG Zibin. Novel planar reconfigurable circularly polarized complementary antenna for unidirectional end-fire radiation[J]. International Journal of RF and Microwave Computer-Aided Engineering, 2020, 30(7): e22211. doi: 10.1002/mmce.22211 [22] 陈巍, 高军, 张广, 等. 一种编码式宽带多功能反射屏[J]. 物理学报, 2017, 66(6): 064203. doi: 10.7498/aps.66.064203CHEN Wei, GAO Jun, ZHANG Guang, et al. A wideband coding reflective metasurface with multiple functionalities[J]. Acta Physica Sinica, 2017, 66(6): 064203. doi: 10.7498/aps.66.064203 [23] YANG Xue, XU Shenheng, YANG Fan, et al. Design of a 2-bit reconfigurable reflectarray element using two MEMS switches[C]. 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, Canada, 2015: 2167–2168. doi: 10.1109/APS.2015.7305472. -


 下载:
下载:








图(16) / 表(2)
计量
- 文章访问数: 2201
- HTML全文浏览量: 1885
- PDF下载量: 173
- 被引次数: 0
