

High-resolution Inverse Synthetic Aperture Radar Imaging with Sparse Stepped-frequency Chirp Signals under Low Signal to Noise Ratio
-
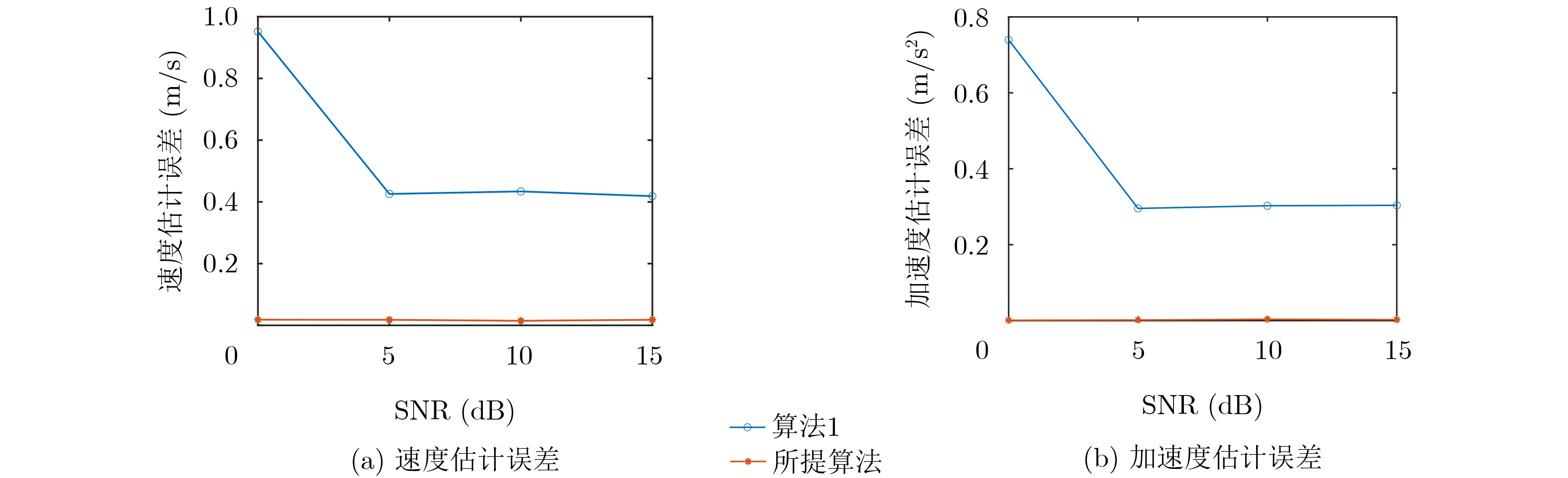
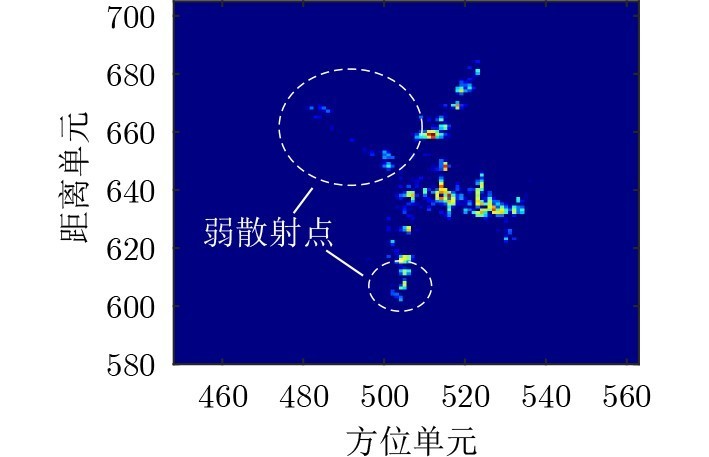
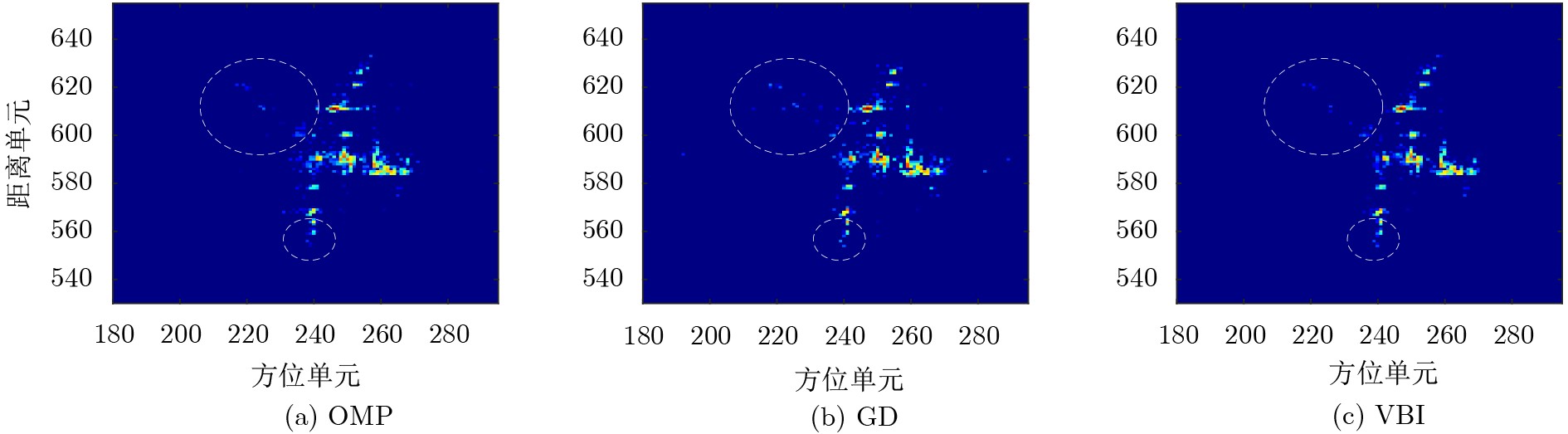
摘要: 针对稀疏步进调频信号对目标径向运动敏感且低信噪比(SNR)下难以聚焦成像的问题,该文提出基于遗传算法和稀疏贝叶斯学习的平动补偿与高分辨逆合成孔径雷达(ISAR)成像方法。首先,针对稀疏步进调频信号建立回波模型和稀疏观测模型,通过构造参数化字典,将ISAR成像问题转换为目标运动参数估计与高分辨距离像(HRRP)合成的联合问题。然后,对目标高分辨距离像引入Gamma-Gauss先验,并采用变分贝叶斯推断(VBI)对散射点进行估计。在此基础上,通过遗传算法迭代同步获得目标运动参数与高质量HRRP,最终实现高分辨聚焦成像和运动参数精确估计。不同场景下的仿真和实测数据处理结果验证了所提算法的有效性。
-
关键词:
- 逆合成孔径雷达(ISAR) /
- 运动参数估计 /
- 稀疏贝叶斯学习 /
- 遗传算法
Abstract: To solve the sensitivity of sparse stepped-frequency chirp signals to target radial motion and to achieve high-resolution imaging with low Signal to Noise Ratio (SNR), a translation compensation and high-resolution Inverse Synthetic Aperture Radar (ISAR) imaging based on genetic algorithm and sparse Bayesian learning is proposed. Firstly, an echo model and a sparse observation model are established for the sparse stepped-frequency chirp signal. A parameterized dictionary is then constructed to turn ISAR imaging to the joint estimation of target motion parameter and High-Resolution Range Profile (HRRP) synthesis. Secondly, the Gamma-Gaussian prior is introduced to the high-resolution range profile of the target, and the scattering center is estimated by the Variational Bayesian Inference (VBI) algorithm. On this basis, target motion parameters and high-quality HRRP are obtained through the iteration of genetic algorithm. Hence, high-resolution imaging of the moving targets is achieved while the motion parameters are accurately estimated. The effectiveness of the proposed method is verified by simulation and real data processing result in various scenes. -
表 1 所提算法伪代码
算法:基于稀疏步进调频信号的低信噪比ISAR成像 (1) 初始化种群$\left( {\Delta {{\hat v}_{\rm{R}}},\Delta {{\hat a}_{\rm{R}}}} \right)$, ${v_1}$, ${v_2}$, ${v_3}$, ${v_4}$, ${\boldsymbol{\varLambda}} $, $\alpha $, ${{{G}}_{\rm{1}}}$, ${{{G}}_{\rm{2}}}$, ${\eta _1}$。 (2) For iter1=1:${{{G}}_{\rm{1}}}$ (a) For k=1:${{K}}$ 构造${\boldsymbol{D}}_k^{\left( {{\rm{iter1}}} \right)}\left( {\Delta {{\hat v}_{\rm{R}}},\Delta {{\hat a}_{\rm{R}}}} \right)$; For iter2=1:${{{G}}_{\rm{2}}}$ 利用式(22)更新$\alpha $; 利用式(24)更新${\boldsymbol{\varLambda}} $; 利用式(26)更新${\boldsymbol{\theta}} $; 若$\hat {\boldsymbol{\theta}} _k^{\left( {{\rm{iter1}}} \right)}$相对于前一次估计的变化量小于${\eta _1}$则停止循环; End End (b) 构建距离像矩阵${\boldsymbol{s} }_{\rm{r} }^{\left( { {\rm{iter1} } } \right)}\left( {\Delta { {\hat v}_{\rm{R} } },\Delta { {\hat a}_{\rm{R} } } } \right) = \left[ { {\boldsymbol{\theta} } _{\rm{1} }^{\left( { {\rm{iter1} } } \right)},{\boldsymbol{\theta} } _{\rm{2} }^{\left( { {\rm{iter1} } } \right)}, \cdots,{\boldsymbol{\theta} } _K^{\left( { {\rm{iter1} } } \right)} } \right]$,得${I^{\left( {{\rm{iter1}}} \right)}}\left( {\Delta {{\hat v}_{\rm{R}}},\Delta {{\hat a}_{\rm{R}}}} \right)$; (c) 根据式(18)计算图像熵; (d) 保留图像熵较小的个体并更新种群; (e) 判断是否达到循环次数${{{G}}_{\rm{1}}}$; End (3) 实现高分辨ISAR成像。  下载: 导出CSV
下载: 导出CSV
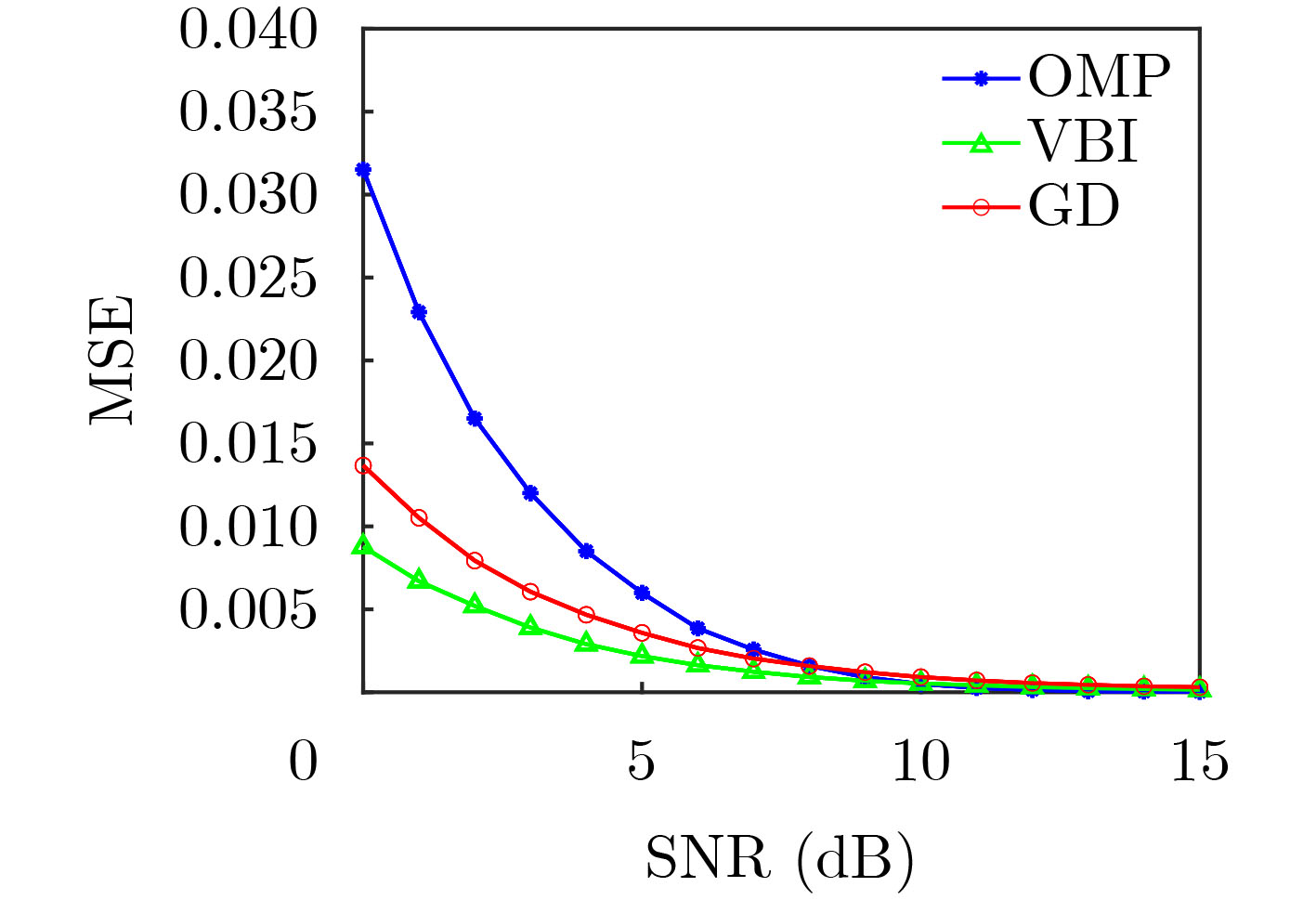
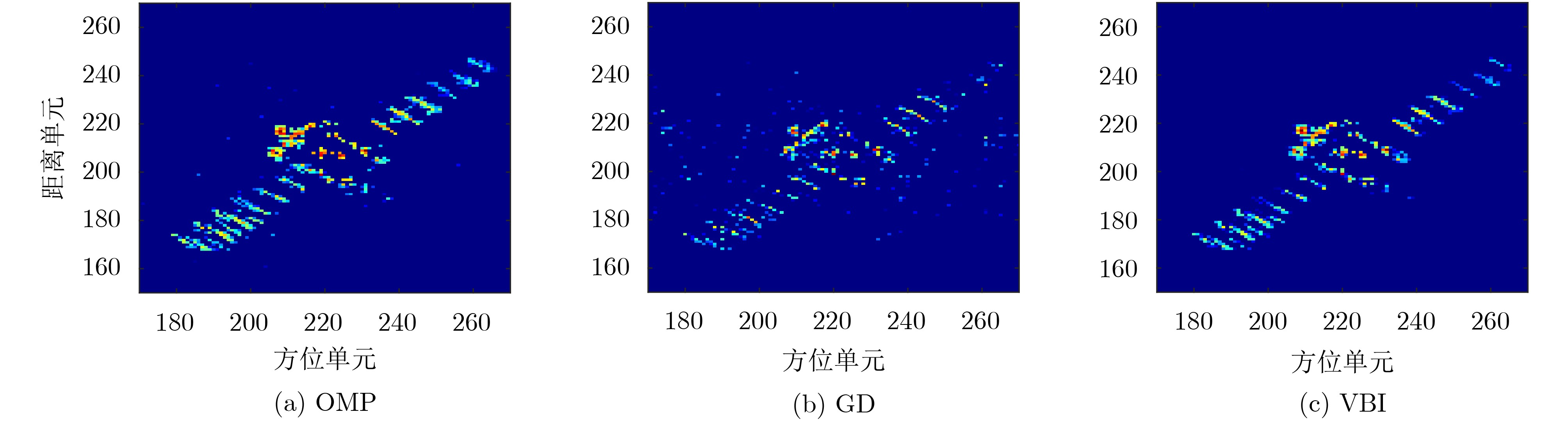
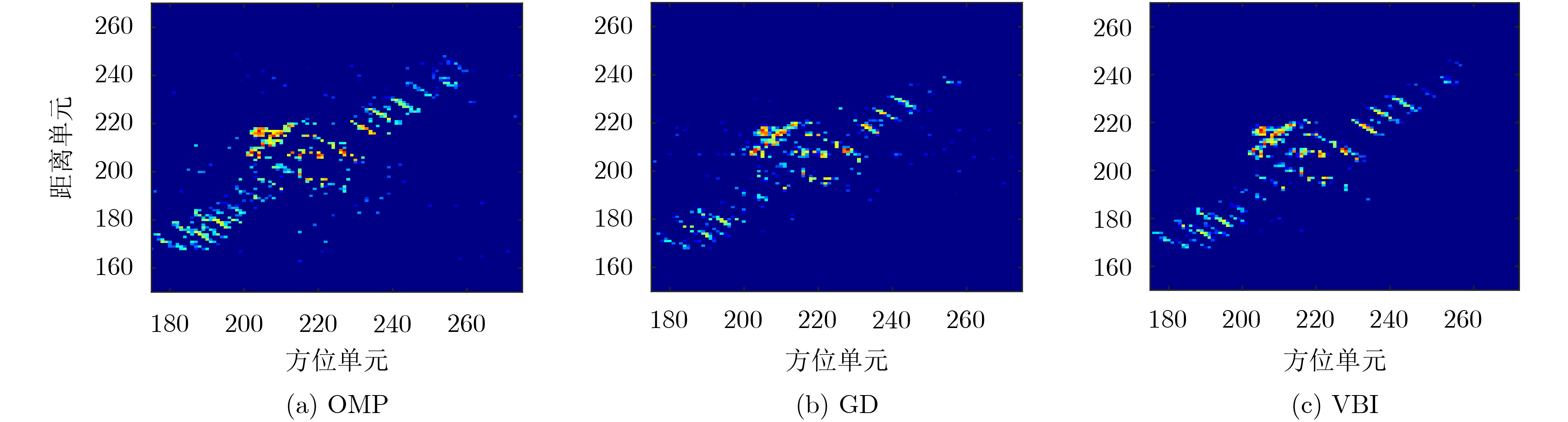
表 2 运算复杂度对比
重构算法 OMP GD VBI 运算复杂度 ${\cal{O}}\left( {{k_0}{L^2}} \right)$ ${\cal{O}}\left( {{L^{\rm{3}}}} \right)$ ${\cal{O}}\left( {{L^{\rm{3}}}} \right)$
下载: 导出CSV
表 3 雷达系统参数
${f_{\rm{c}}}$ ${\rm{PRF}}$ ${T_{\rm{R}}}$ $B$ $\Delta f$ 10 GHz 6.4 kHz 20 μs 800 MHz 10 MHz
下载: 导出CSV
-
[1] BAI Xueru, ZHOU Xuening, ZHANG Feng, et al. Robust pol-ISAR target recognition based on ST-MC-DCNN[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(12): 9912–9927. doi: 10.1109/TGRS.2019.2930112 [2] 王天云, 陆新飞, 孙麟, 等. 基于贝叶斯压缩感知的ISAR自聚焦成像[J]. 电子与信息学报, 2015, 37(11): 2719–2726. doi: 10.11999/JEIT150235WANG Tianyun, LU Xinfei, SUN Lin, et al. An autofocus imaging method for ISAR based on Bayesian compressive sensing[J]. Journal of Electronics &Information Technology, 2015, 37(11): 2719–2726. doi: 10.11999/JEIT150235 [3] LUO Ying, ZHANG Qun, QIU Chengwei, et al. Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(4): 2087–2098. doi: 10.1109/TGRS.2009.2034367 [4] ZHANG Lei, XING Mengdao, QIU Chengwei, et al. Resolution enhancement for inversed synthetic aperture radar imaging under low SNR via improved compressive sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(10): 3824–3838. doi: 10.1109/TGRS.2010.2048575 [5] FU Wei, JIANG Defu, GAO Yiyue, et al. An adaptive optimal waveform design algorithm based on frequency-stepped chirp signal[J]. IET Radar, Sonar & Navigation, 2019, 13(6): 892–899. doi: 10.1049/iet-rsn.2018.5410 [6] WEI Shaopeng, ZHANG Lei, MA Hui, et al. Sparse frequency waveform optimization for high-resolution ISAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(1): 546–566. doi: 10.1109/TGRS.2019.2937965 [7] JEONG H R, KIM H T, and KIM K T. Application of subarray averaging and entropy minimization algorithm to stepped-frequency ISAR autofocus[J]. IEEE Transactions on Antennas and Propagation, 2008, 56(4): 1144–1154. doi: 10.1109/TAP.2008.919208 [8] LIU Yabo, XING Mengdao, ZHANG Leiyong, et al. Novel range profile synthesis algorithm for linearly stepped-frequency modulated inversed synthetic aperture radar imaging of remote manoeuvring target[J]. IET Radar, Sonar & Navigation, 2011, 5(4): 496–506. doi: 10.1049/iet-rsn.2010.0013 [9] LIAO Zhikun, HU Jiemin, LU Dawei, et al. Motion analysis and compensation method for random stepped frequency radar using the pseudorandom code[J]. IEEE Access, 2018, 6: 57643–57654. doi: 10.1109/ACCESS.2018.2873784 [10] KANG M S, LEE S J, LEE S H, et al. ISAR imaging of high-speed maneuvering target using gapped stepped-frequency waveform and compressive sensing[J]. IEEE Transactions on Image Processing, 2017, 26(10): 5043–5056. doi: 10.1109/TIP.2017.2728182 [11] 李瑞, 张群, 苏令华, 等. 基于稀疏贝叶斯学习的双基雷达关联成像[J]. 电子与信息学报, 2019, 41(12): 2865–2872. doi: 10.11999/JEIT180933LI Rui, ZHANG Qun, SU Linghua, et al. Bistatic radar coincidence imaging based on sparse Bayesian learning[J]. Journal of Electronics &Information Technology, 2019, 41(12): 2865–2872. doi: 10.11999/JEIT180933 [12] BAI Xueru, ZHANG Yu, and ZHOU Feng. High-resolution radar imaging in complex environments based on Bayesian learning with mixture models[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(2): 972–984. doi: 10.1109/TGRS.2018.2863743 [13] LI Yuanyuan, FU Yaowen, and ZHANG Wenpeng. High-resolution distributed ISAR imaging by OMP method[J]. The Journal of Engineering, 2019, 2019(19): 6138–6142. doi: 10.1049/joe.2019.0380 [14] ZHU Feng, ZHANG Qun, LEI Qiang, et al. Reconstruction of moving target’s HRRP using sparse frequency-stepped chirp signal[J]. IEEE Sensors Journal, 2011, 11(10): 2327–2334. doi: 10.1109/JSEN.2011.2136375 [15] ZHANG Lei, QIAO Zhijun, XING Mengdao, et al. High-resolution ISAR imaging with sparse stepped-frequency waveforms[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(11): 4630–4651. doi: 10.1109/TGRS.2011.2151865 [16] ZHANG Shuanghui, LIU Yongxiang, LI Xiang, et al. Bayesian high resolution range profile reconstruction of high-speed moving target from under-sampled data[J]. IEEE Transactions on Image Processing, 2020, 29: 5110–5120. doi: 10.1109/TIP.2020.2980149 [17] NING Yu, BAI Xueru, ZHOU Feng, et al. Method for inverse synthetic aperture radar imaging of space debris using improved genetic algorithm[J]. IET Radar, Sonar & Navigation, 2017, 11(5): 812–821. doi: 10.1049/iet-rsn.2016.0048 [18] SUN Lin and CHEN Weidong. Improved Bayesian ISAR imaging by learning the local structures of the target scene[J]. IEEE Sensors Journal, 2019, 19(19): 8865–8877. doi: 10.1109/JSEN.2019.2919572 [19] ZHOU Feng, BAI Xueru, XING Mengdao, et al. Analysis of wide-angle radar imaging[J]. IET Radar, Sonar & Navigation, 2011, 5(4): 449–457. doi: 10.1049/iet-rsn.2010.0076 [20] 杨磊, 夏亚波, 毛欣瑶, 等. 基于分层贝叶斯Lasso的稀疏ISAR成像算法[J]. 电子与信息学报, 2021, 43(3): 623–631. doi: 10.11999/JEIT200292YANG Lei, XIA Yabo, MAO Xinyao, et al. Sparse ISAR imaging algorithm based on Bayesian-lasso[J]. Journal of Electronics &Information Technology, 2021, 43(3): 623–631. doi: 10.11999/JEIT200292 -

 下载:
下载:




图(11) / 表(6)
计量
- 文章访问数: 1898
- HTML全文浏览量: 886
- PDF下载量: 146
- 被引次数: 0
