

Off-grid Sparse Representation Based Localization Method for Near-field Sources
-
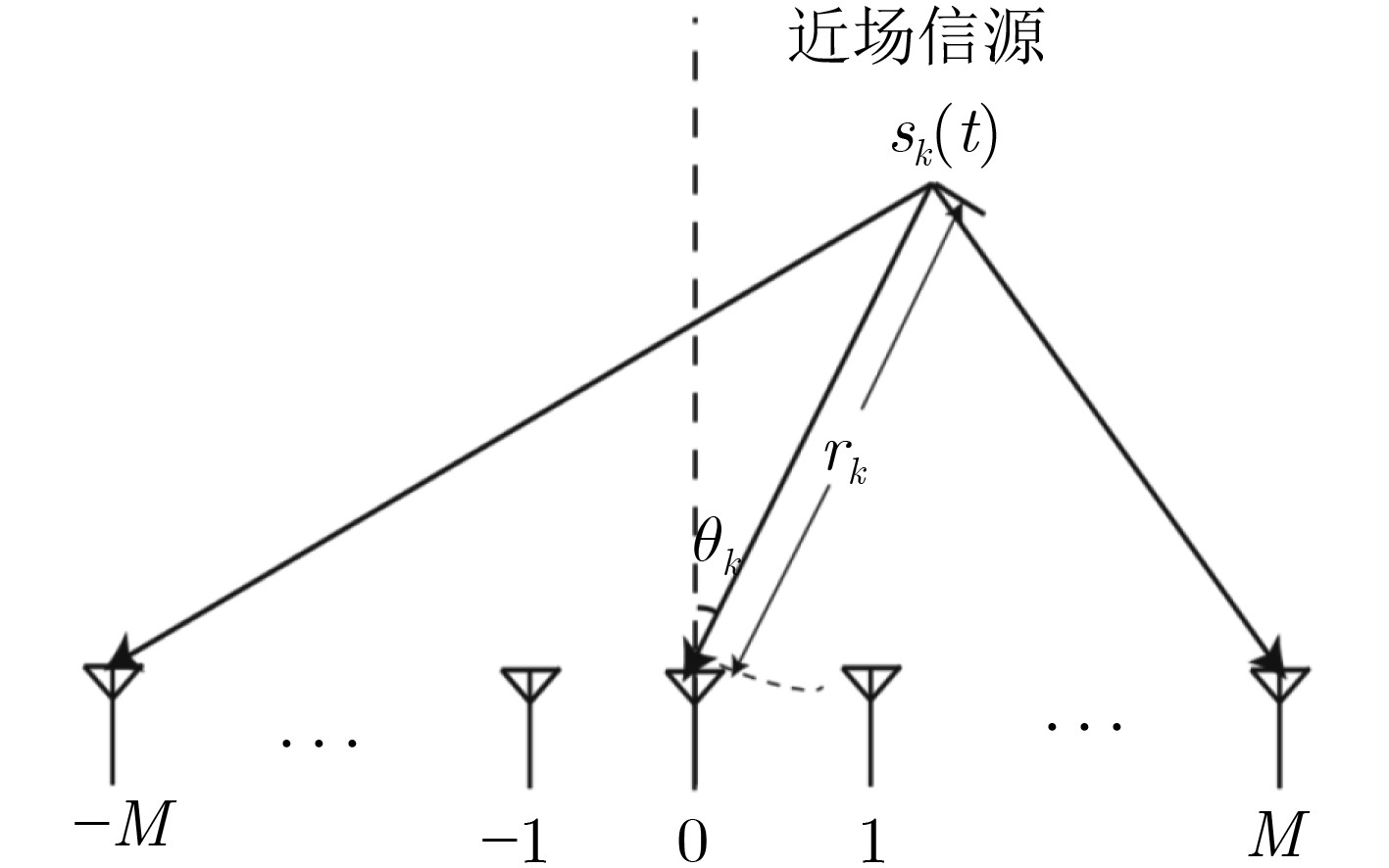
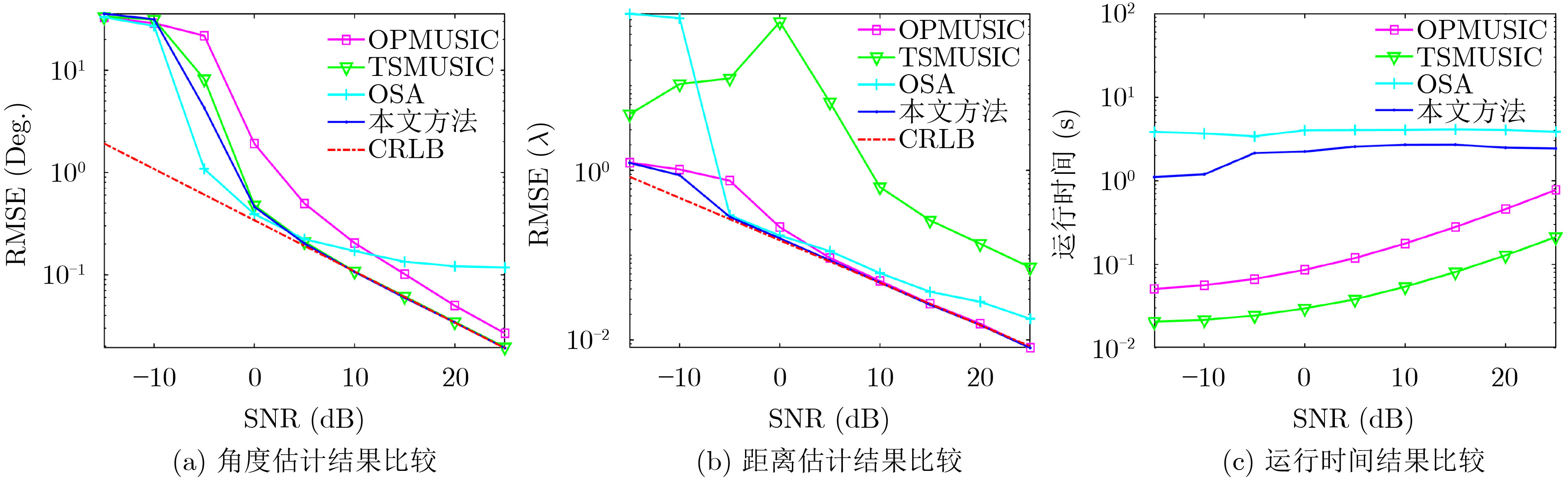
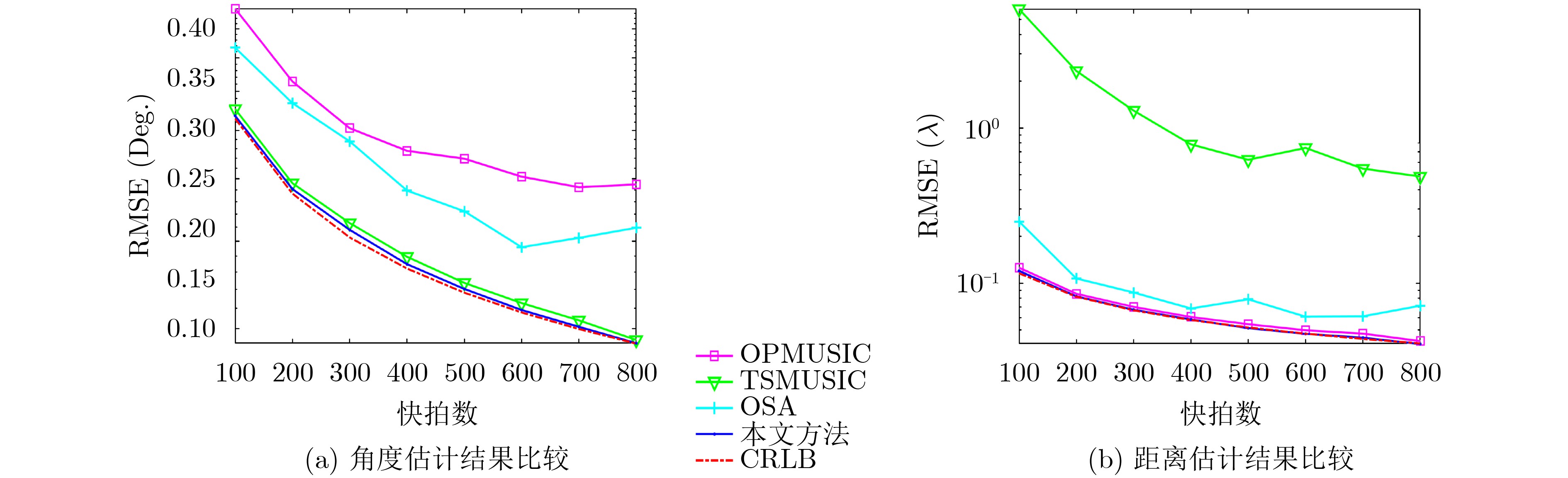
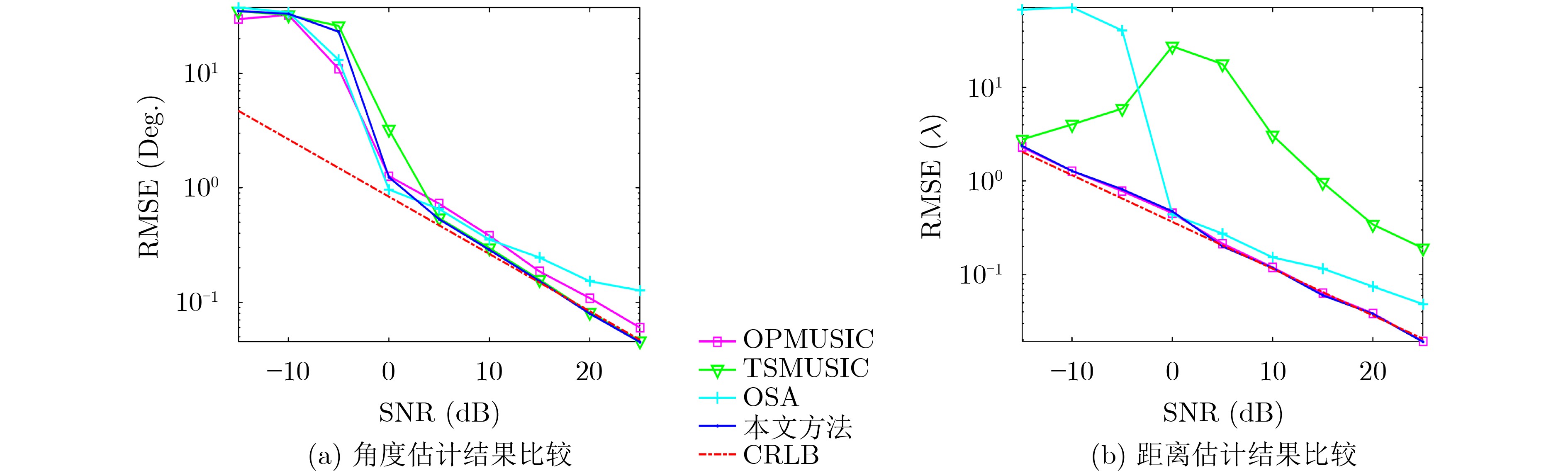
摘要: 近场信源定位是下一代无线通信中的一个重要研究方向,现有的方法大多集中在传统子空间或在格稀疏方法。针对子空间类方法损失阵列孔径和稀疏表示类方法精度受网格划分效应制约的问题,该文提出了一种基于离格稀疏表示的定位方法。首先通过获得一个高阶累积量矩阵建立基于角度参数的离格信号模型,利用交替迭代优化方法实现角度的估计。然后根据角度估计值建立基于距离参数的离格信号模型,并采用交替迭代方法进行求解。仿真结果表明,所提方法不仅具有较高的估计精度,而且可以实现角度和距离参数的正确配对。Abstract: Near-field source localization is a potential research topic in next-generation wireless communications. Most existing methods focus on traditional subspace based methods or on-grid sparse methods. For the problem that the accuracy of subspace class method loss array aperture and sparse representation method is restricted by mesh effect, an off-grid sparse representation localization method is proposed in this paper. First, by obtaining a high-order cumulant matrix, an angle based off-grid signal model is constructed and then the alternatively iterating optimization method is employed to estimate the angles. For range estimation, a range parameter based off-grid signal model is constructed by using the angle estimation values and is solved by alternatively iterating method. Simulation results reveal that the proposed method not only possesses high estimation accuracy, but also can realize auto-pairing of angles and ranges.
-
[1] SCHMIDT R. Multiple emitter location and signal parameter estimation[J]. IEEE Transactions on Antennas and Propagation, 1986, 34(3): 276–280. doi: 10.1109/TAP.1986.1143830 [2] ROY R and KAILATH T. ESPRIT-estimation of signal parameters via rotational invariance techniques[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1989, 37(7): 984–995. doi: 10.1109/29.32276 [3] MALIOUTOV D, CETIN M, and WILLSKY A S. A sparse signal reconstruction perspective for source localization with sensor arrays[J]. IEEE Transactions on Signal Processing, 2005, 53(8): 3010–3022. doi: 10.1109/TSP.2005.850882 [4] 蒋莹, 王冰切, 韩俊, 等. 基于分布式压缩感知的宽带欠定信号DOA估计[J]. 电子与信息学报, 2019, 41(7): 1690–1697. doi: 10.11999/JEIT180723JIANG Ying, WANG Bingqie, HAN Jun, et al. Underdetermined wideband DOA estimation based on distributed compressive sensing[J]. Journal of Electronics &Information Technology, 2019, 41(7): 1690–1697. doi: 10.11999/JEIT180723 [5] WU Xiaohuan, ZHU Weiping, and YAN Jun. Direction of arrival estimation for off-grid signals based on sparse bayesian learning[J]. IEEE Sensors Journal, 2016, 16(7): 2004–2016. doi: 10.1109/JSEN.2015.2508059 [6] CHEN Peng, CAO Zhenxin, CHEN Zhimin, et al. Sparse off-grid DOA estimation method with unknown mutual coupling effect[J]. Digital Signal Processing, 2019, 90: 1–9. doi: 10.1016/j.dsp.2019.04.001 [7] CHEN Peng, CHEN Zhimin, CAO Zhenxin, et al. A new atomic norm for DOA estimation with gain-phase errors[J]. IEEE Transactions on Signal Processing, 2020, 68: 4293–4306. doi: 10.1109/TSP.2020.3010749 [8] ZHU Hao, LEUS G, and GIANNAKIS G. Sparsity-cognizant total least-squares for perturbed compressive sampling[J]. IEEE Transactions on Signal Processing, 2011, 59(5): 2002–2016. doi: 10.1109/TSP.2011.2109956 [9] YANG Zai, ZHANG Cishen, and XIE Lihua. Robustly stable signal recovery in compressed sensing with structured matrix perturbation[J]. IEEE Transactions on Signal Processing, 2012, 60(9): 4658–4671. doi: 10.1109/TSP.2012.2201152 [10] YANG Zai, XIE Lihua, and ZHANG Cishen. Off-grid direction of arrival estimation using sparse Bayesian inference[J]. IEEE Transactions on Signal Processing, 2013, 61(1): 38–43. doi: 10.1109/TSP.2012.2222378 [11] WU Xiaohuan, ZHU Weiping, YAN Jun, et al. Two sparse-based methods for off-grid direction-of-arrival estimation[J]. Signal Processing, 2018, 142: 87–95. doi: 10.1016/j.sigpro.2017.07.004 [12] BJÖRNSON E, SANGUINETTI L, WYMEERSCH H, et al. Massive MIMO is a reality - what is next?: five promising research directions for antenna arrays[J]. Digital Signal Processing, 2019, 94: 3–20. doi: 10.1016/j.dsp.2019.06.007 [13] HE J, SWAMY M N S, and AHMAD M. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources[J]. IEEE Transactions on Signal Processing, 2012, 60(4): 2066–2070. doi: 10.1109/TSP.2011.2180902 [14] LIANG Junli and LIU Ding. Passive localization of mixed near-field and far-field sources using two-stage MUSIC algorithm[J]. IEEE Transactions on Signal Processing, 2010, 58(1): 108–120. doi: 10.1109/TSP.2009.2029723 [15] WANG Bo, LIU Juanjuan, and SUN Xiaoying. Mixed sources localization based on sparse signal reconstruction[J]. IEEE Signal Processing Letters, 2012, 19(8): 487–490. doi: 10.1109/lsp.2012.2204248 -

 下载:
下载:



图(5)
计量
- 文章访问数: 1189
- HTML全文浏览量: 834
- PDF下载量: 135
- 被引次数: 0
