

DOA Estimation Technology Based on Khatri-Rao Product for 3D Forward-looking Sonar
-
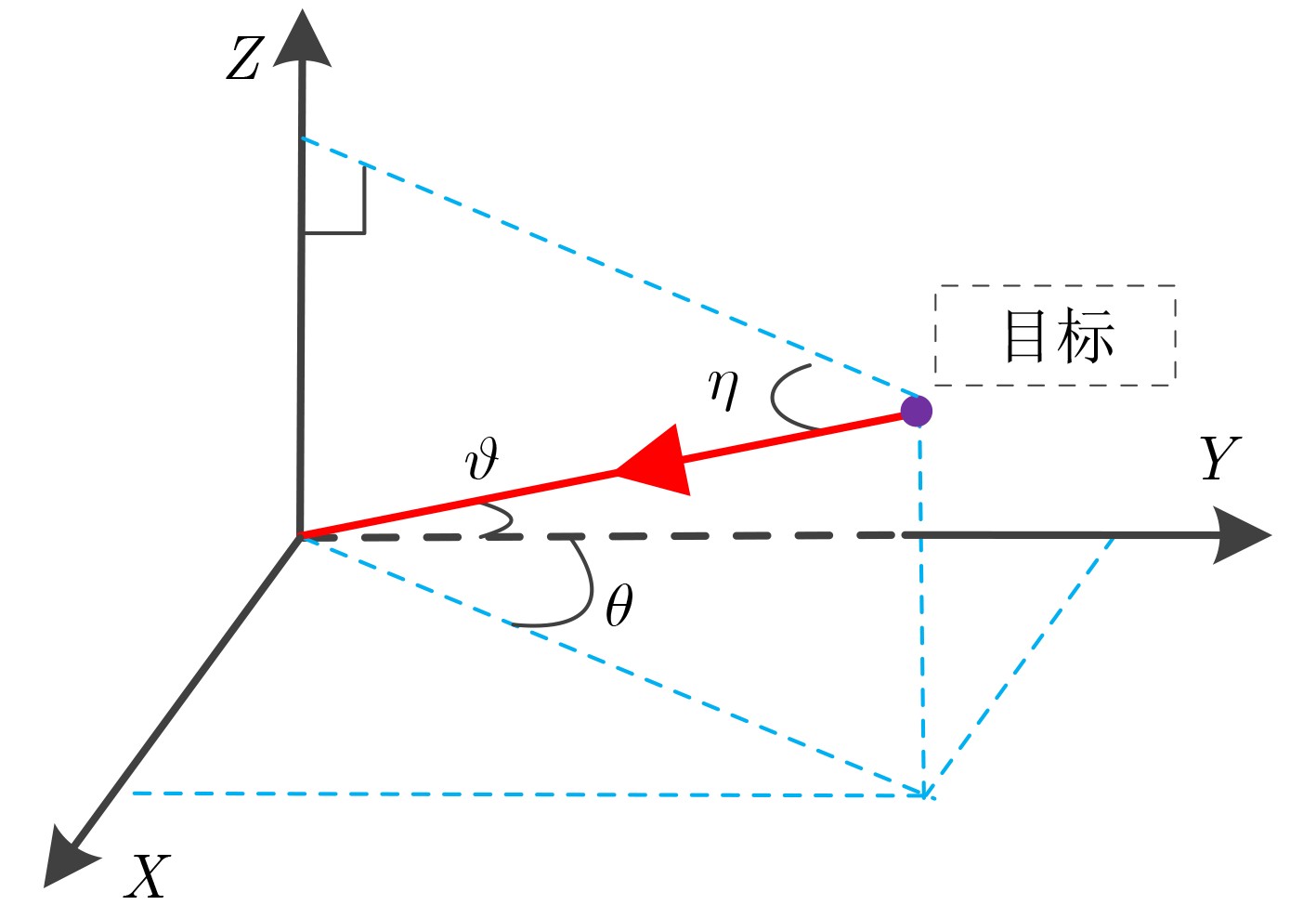
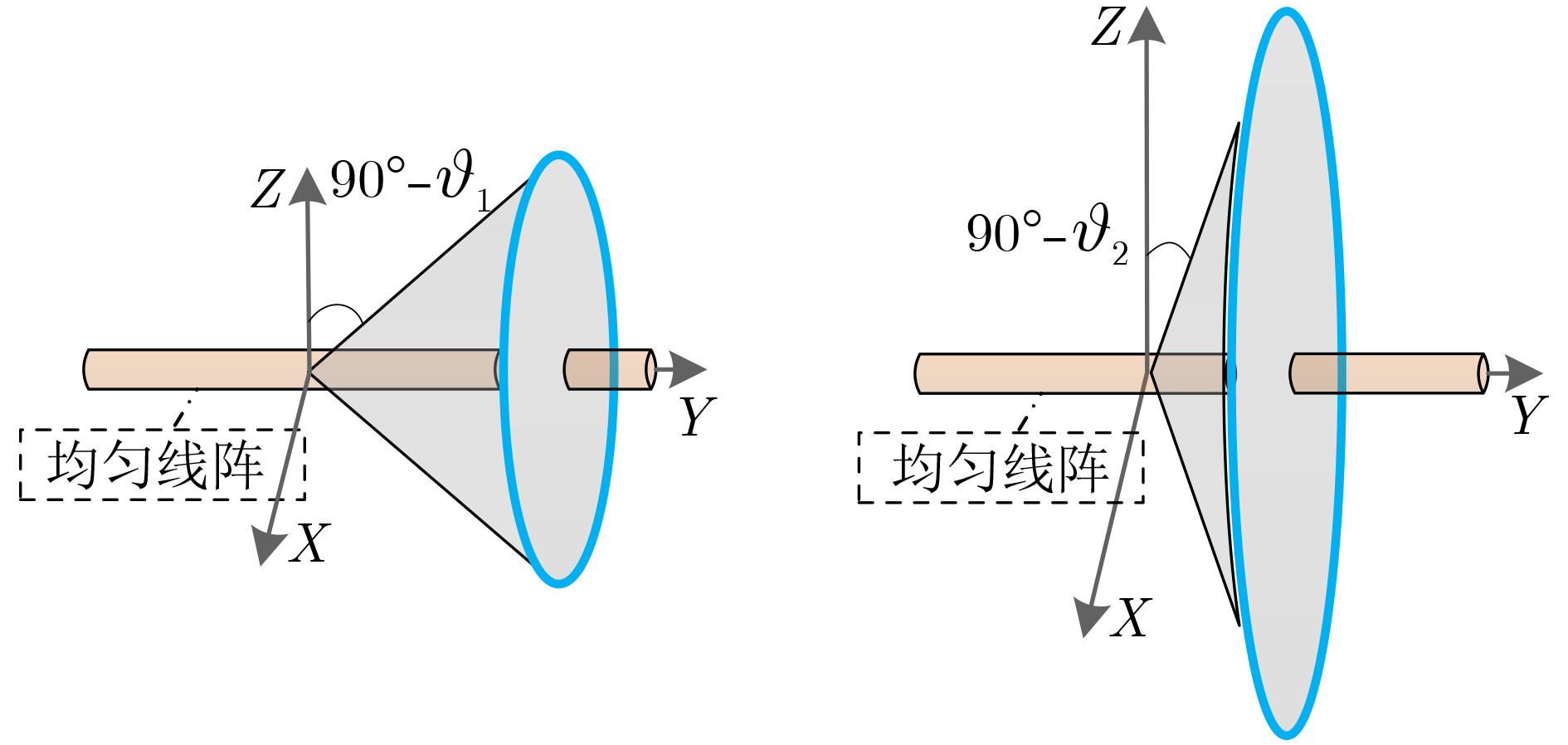
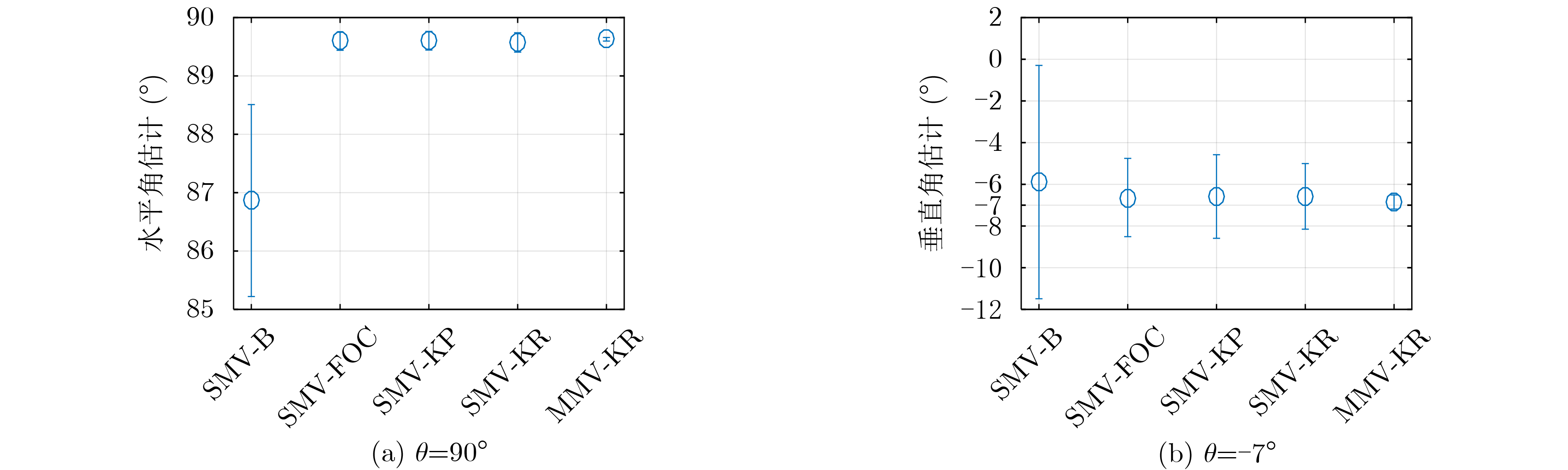
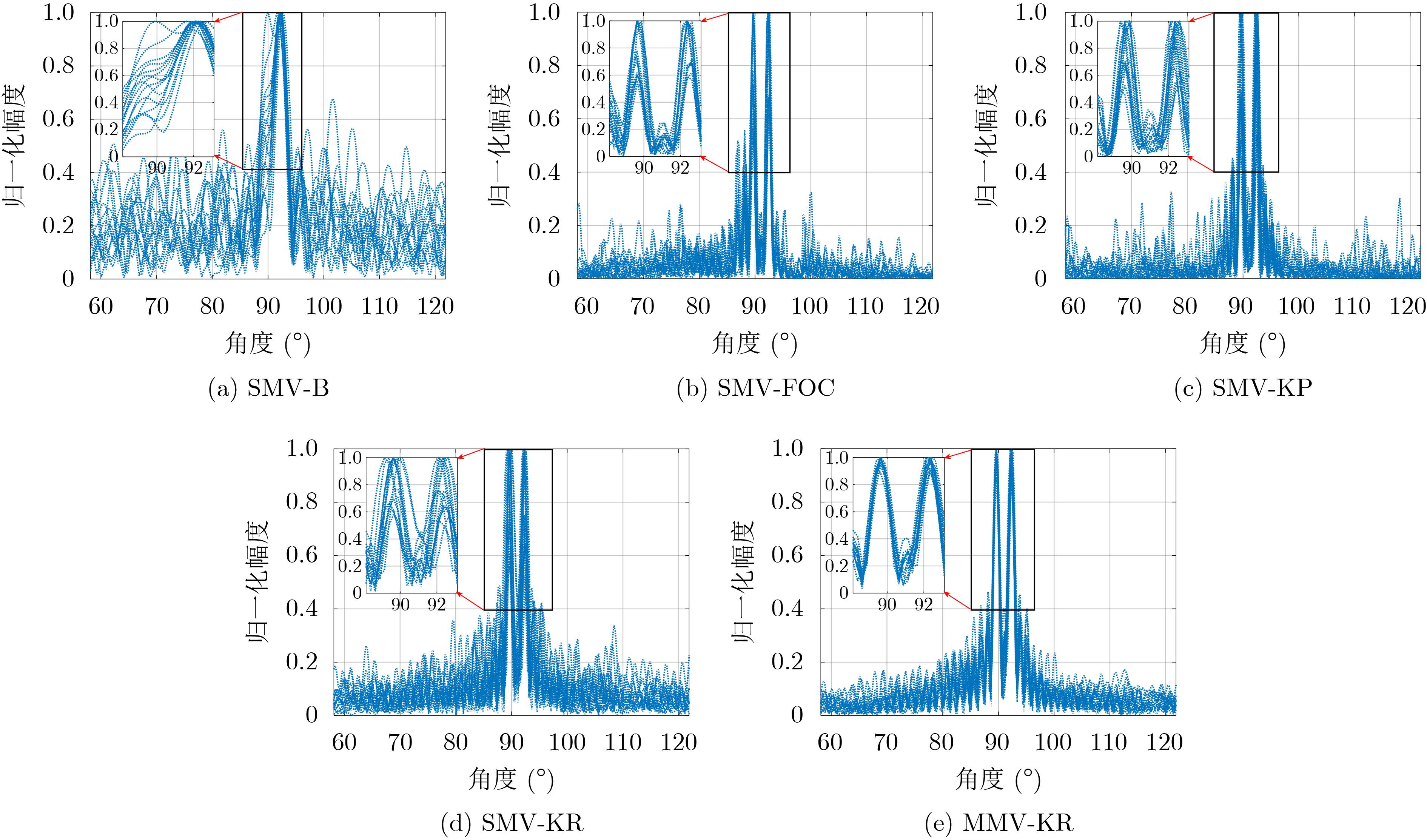
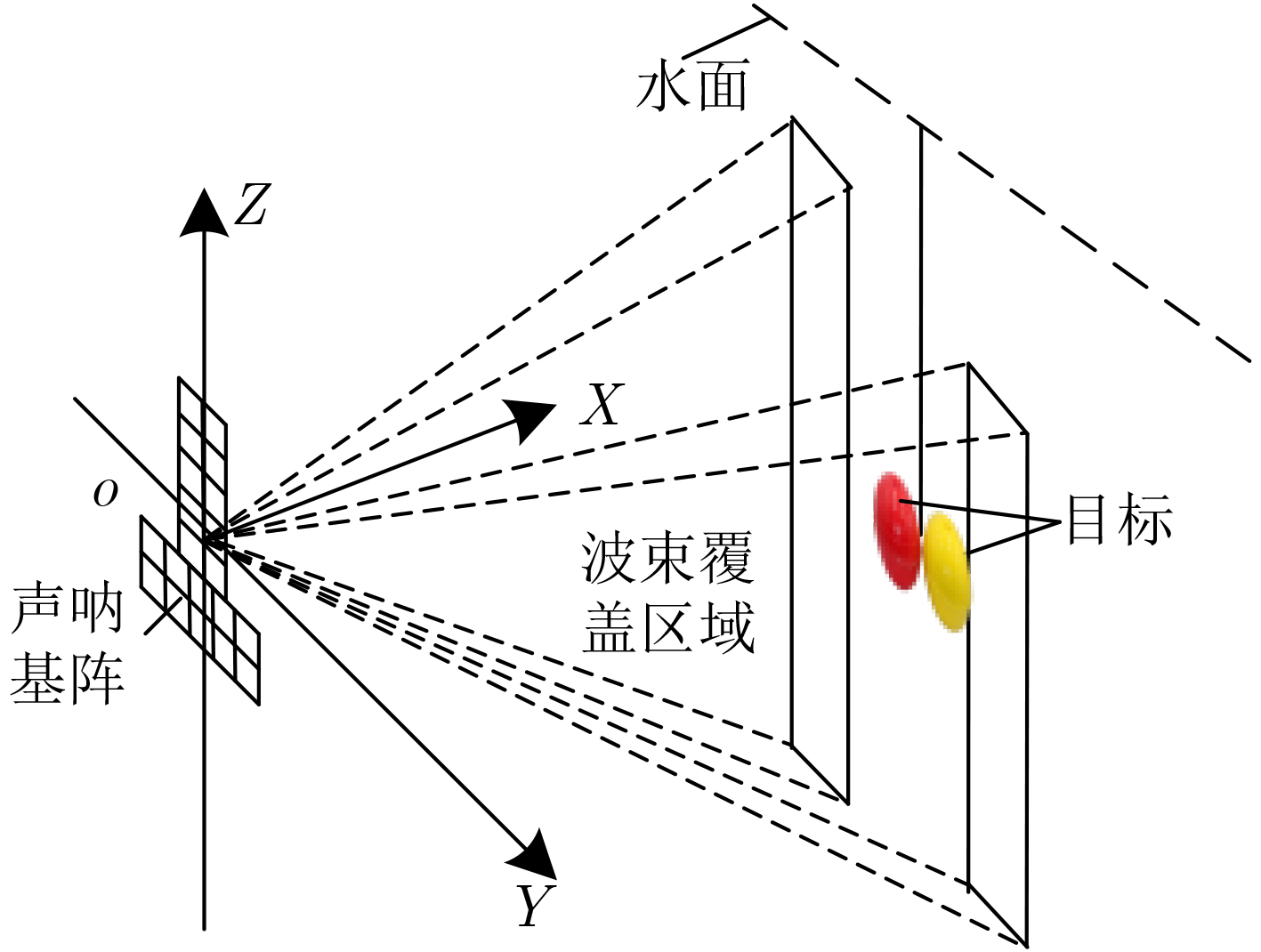
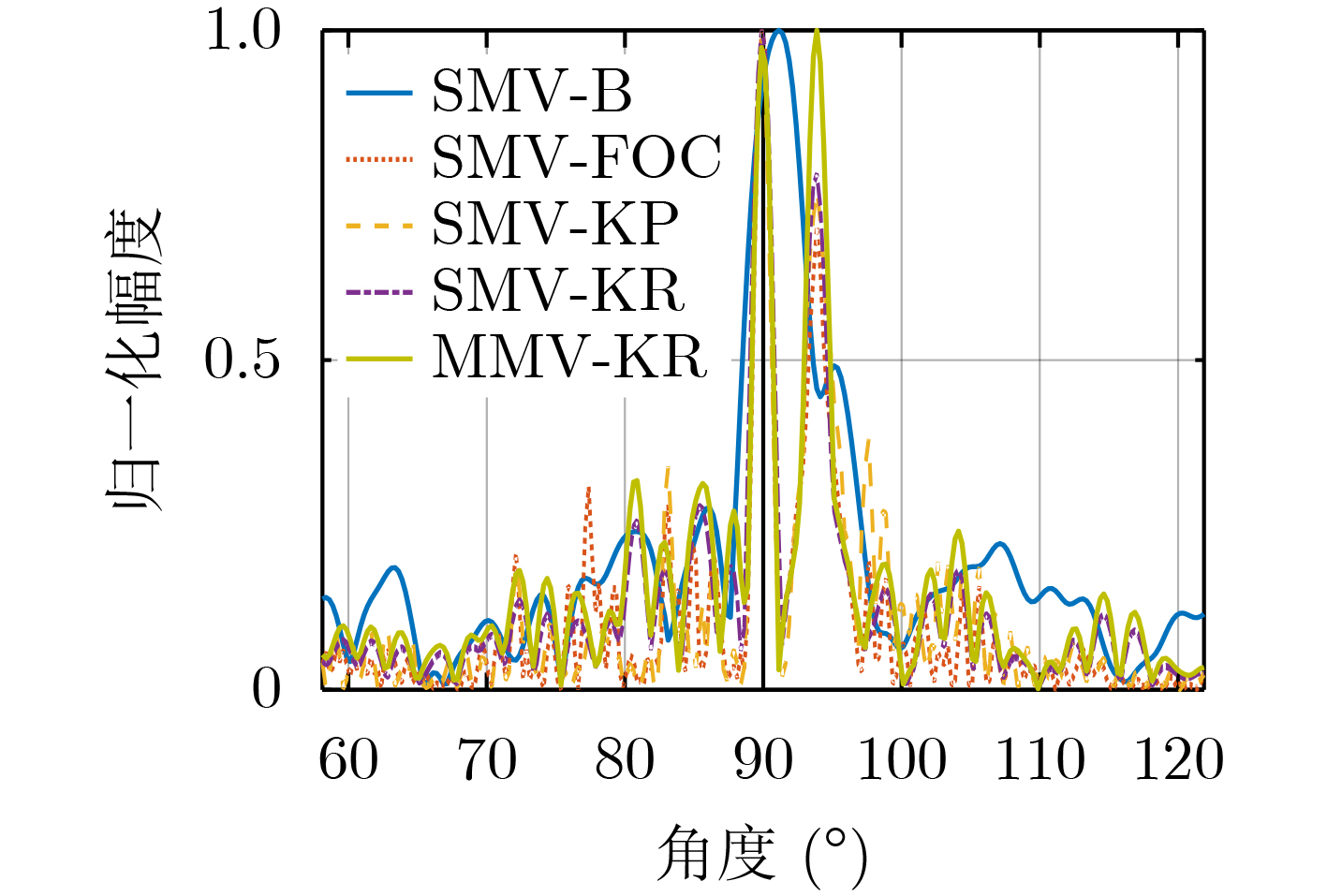
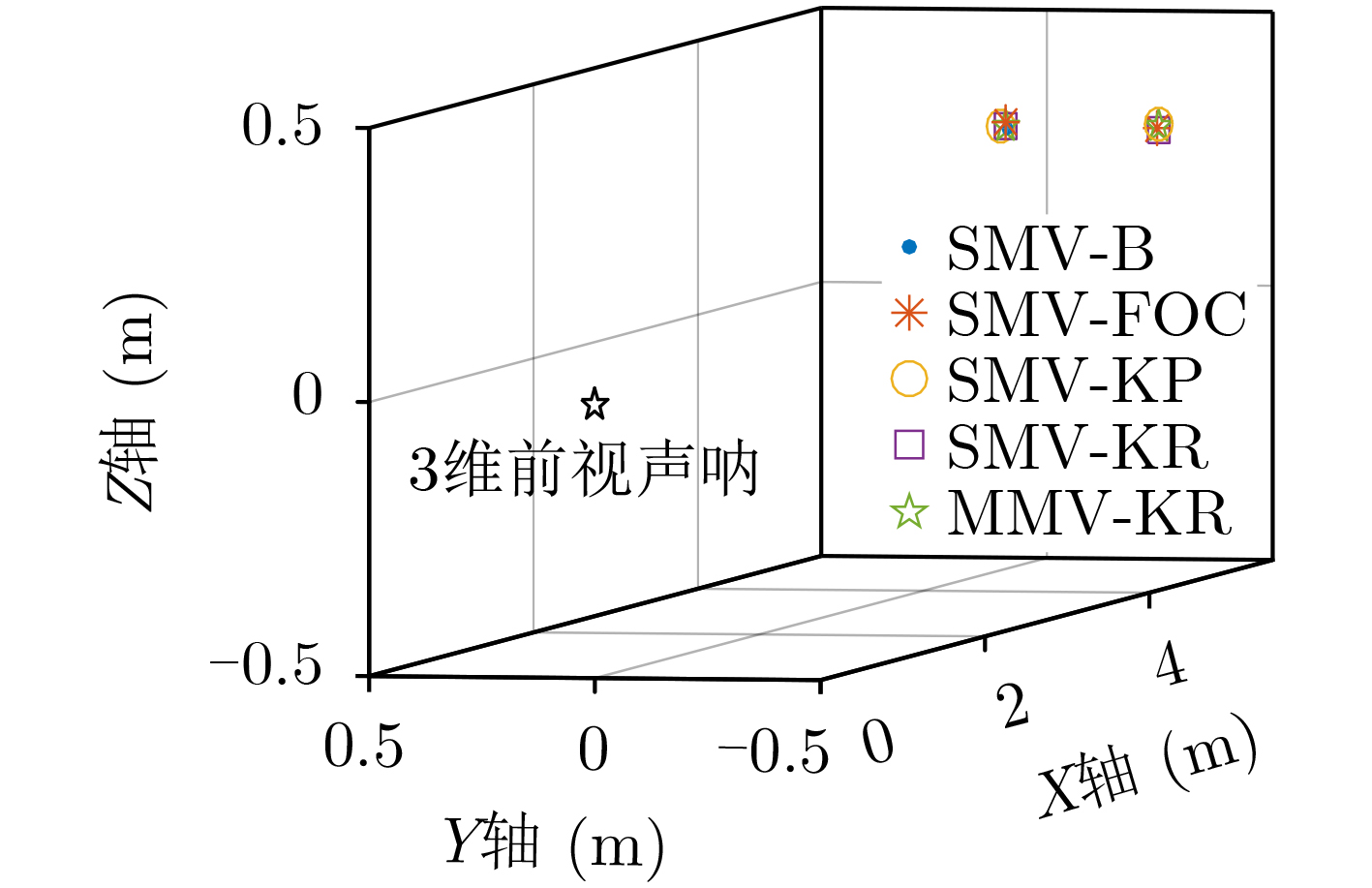
摘要: 为了提高3维前视声呐的方位分辨能力,同时避免2维(2D)方位估计(DOA)方法失效,该文提出1维(1D)空间角估计方法、基于Vernier法的垂直角估计方法和基于最小角定理的水平角方位估计方法。首先基于不同子阵构造互协方差矩阵避免2维方位估计模型失效,再利用Khatri-Rao积进行虚拟孔径扩展;将扩展后的阵列导向矢量和观测向量模型用于2维方位估计。与原阵列的导向矢量相比,虚拟阵元数量约增加1倍,阵列的孔径得到有效扩展。仿真实验表明,与单观测向量波束形成2维方位估计方法相比,所提方法在2维方位估计问题中具有更高的分辨能力,均方根误差更低;水池实验进一步验证了该文所提方法的工程实用性。
-
关键词:
- 3维前视声呐 /
- 2维方位估计 /
- 虚拟孔径扩展 /
- Khatri-Rao积 /
- Vernier法
Abstract: In order to obtain higher resolution and avoid the failure of Two-Dimensional (2D) of Direction-Of-Arrival (DOA) estimation, One-Dimensional (1D) spatial DOA estimation method, vertical DOA estimation via Vernier method and horizontal DOA estimation method via minimum angle theorem are proposed. First, covariance matrices are constructed based on various subarrays to alleviate the failure of 2D model, and the Khatri-Rao product is adopted to extend the virtual array aperture. Second, the extended observation models and corresponding array steer vector are exploited for 2D DOA estimation. Compared with the steer vector of the original array, the number of virtual array elements is doubled, and thus the array aperture is extended. Simulation results show that the proposed method has better resolution and lower RMSE performance in 2D DOA estimation problem compared with the Single Measured Vector Beamforming method. The tank experiment further verifies the engineering practicability of the proposed method. -
HENLEY H and ZIMMERMAN M J. Performance of 3D forward looking sonar for bathymetric survey[C]. OCEANS 2017-Anchorage, Anchorage, USA, 2017: 1–9. RUSSEL I and WRIGHT R G. Navigation SONAR: More than underwater radar realizing the full potential of navigation and obstacle avoidance sonar[J]. International Hydrographic Review, 2017: 41–60. ZIMMERMAN M J and HENLEY H. Applications of today’s 3D forward looking sonar for real-time navigation and bathymetric survey[C]. OCEANS 2017-Anchorage, Anchorage, USA, 2017: 1–7. Tritech International Ltd. Eclipse 3D imaging sonar product manual[EB/OL]. https://www.tritech.co.uk/media/support/manuals/eclipse-multibeam-sonar-operator-installation-manual0.pdf, 2020. Coda Octopus Products Ltd. Echoscope 4G datasheet[EB/OL]. https://d1io3yog0oux5.cloudfron.net/_d5c808f4da6c3542e43d3cef98f952d3/codaoctopus/db/443/2846/brochure/Echoscope+4G+Datasheet+1.1.1.20.pdf, 2020. Teledyne RESON. SeaBat® F30[EB/OL]. https://www.bluezonegroup.com.au/_literature_165599/SeaBat_F30_Product_Leaflet, 2020. 陈建, 王树勋. 基于高阶累积量虚拟阵列扩展的DOA估计[J]. 电子与信息学报, 2007, 29(5): 1041–1044.CHEN Jian and WANG Shuxun. DOA estimation of virtual array extension based on fourth-order cumulant[J]. Journal of Electronics &Information Technology, 2007, 29(5): 1041–1044. 杨永晶, 俞志富. 基于虚拟阵列扩展的DOA估计[J]. 电子信息对抗技术, 2014, 29(5): 32–35, 39. doi: 10.3969/j.issn.1674-2230.2014.05.008YANG Yongjing and YU Zhifu. DOA estimation based on virtual array extension[J]. Electronic Information Warfare Technology, 2014, 29(5): 32–35, 39. doi: 10.3969/j.issn.1674-2230.2014.05.008 韩佳辉, 毕大平, 陈璐. 基于虚拟孔径扩展的非均匀稀疏阵DOA估计[J]. 电光与控制, 2018, 25(3): 28–31. doi: 10.3969/j.issn.1671-637X.2018.03.007HAN Jiahui, BI Daping, and CHEN Lu. Non-uniform sparse array DOA estimation based on virtual aperture expansion[J]. Electronics Optics &Control, 2018, 25(3): 28–31. doi: 10.3969/j.issn.1671-637X.2018.03.007 谭伟杰, 冯西安, 张杨梅. 阵元失效下基于Khatri-Rao积的高分辨测向方法[J]. 太赫兹科学与电子信息学报, 2017, 15(1): 47–53. doi: 10.11805/TKYDA201701.0047TAN Weijie, FENG Xi’an, and ZHANG Yangmei. High-resolution DOA estimation method based on Khatri-Rao product in presence of element failure[J]. Journal of Terahertz Science and Electronic Information Technology, 2017, 15(1): 47–53. doi: 10.11805/TKYDA201701.0047 刘志刚, 汪晋宽, 王福利. 虚拟空间平滑算法[J]. 电子学报, 2007, 35(9): 1762–1765. doi: 10.3321/j.issn:0372-2112.2007.09.030LIU Zhigang, WANG Jinkuan, and WANG Fuli. Virtual spatial smoothing algorithm[J]. Acta Electronica Sinica, 2007, 35(9): 1762–1765. doi: 10.3321/j.issn:0372-2112.2007.09.030 孙兵, 阮怀林, 吴晨曦, 等. 基于Toeplitz协方差矩阵重构的互质阵列DOA估计方法[J]. 电子与信息学报, 2019, 41(8): 1924–1930. doi: 10.11999/JEIT181041SUN Bing, RUAN Huailin, WU Chenxi, et al. Direction of arrival estimation with coprime array based on toeplitz covariance matrix reconstruction[J]. Journal of Electronics &Information Technology, 2019, 41(8): 1924–1930. doi: 10.11999/JEIT181041 YUFIT G and MAILLARD E P. 3D forward looking sonar technology for surface ships and AUV: Example of design and bathymetry application[C]. 2013 IEEE International Underwater Technology Symposium, Tokyo, Japan, 2013: 1–5. 周天, 沈嘉俊, 陈宝伟, 等. 应用二维稀疏阵列的三维前视声呐方位估计[J]. 哈尔滨工程大学学报, 2020, 41(10): 1450–1456. doi: 10.11990/jheu.202007031ZHOU Tian, SHEN Jiajun, Chen Baowei, et al. Direction-of-arrival estimation of three-dimensional forward-looking sonar with two-dimensional sparse array[J]. Journal of Harbin Engineering University, 2020, 41(10): 1450–1456. doi: 10.11990/jheu.202007031 姚永红, 周天, 李海森, 等. 基于新型阵列结构的多波束SAS逐点成像算法研究[J]. 电子与信息学报, 2011, 33(4): 838–843. doi: 10.3724/SP.J.1146.2010.00730YAO Yonghong, ZHOU Tian, LI Haisen, et al. Research on the dot-by-dot imaging algorithm for multi-beam SAS based on a new array configuration[J]. Journal of Electronics &Information Technology, 2011, 33(4): 838–843. doi: 10.3724/SP.J.1146.2010.00730 王俊, 向洪, 魏少明, 等. 单快拍数据的分布式二维阵列测角方法研究[J]. 电子与信息学报, 2018, 40(6): 1375–1382. doi: 10.11999/JEIT170856WANG Jun, XIANG Hong, WEI Shaoming, et al. 2-D DOA estimation of distributed array with single snapshot[J]. Journal of Electronics &Information Technology, 2018, 40(6): 1375–1382. doi: 10.11999/JEIT170856 LLORT-PUJOL G, SINTES C, and GUERIOT D. Analysis of Vernier interferometers for sonar bathymetry[C]. OCEANS 2008, Quebec City, Canada, 2008: 1–5. BURDIC W S. Underwater Acoustic System Analysis[M]. 2nd ed. Los Altos Hills: Peninsula, 2002: 317–320. SINTES C, FOOTE K G, LLORT-PUJOL G, et al. Relationships among Vernier-method and other direction-of-arrival estimators[C]. OCEANS 2015, Genoa, Italy, 2015: 1–6. -


 下载:
下载:




图(10)
计量
- 文章访问数: 1804
- HTML全文浏览量: 607
- PDF下载量: 79
- 被引次数: 0
