

A Safe and High Efficiency Control Strategy of Unmanned Aerial Vehicles Partition Rendezvous
-
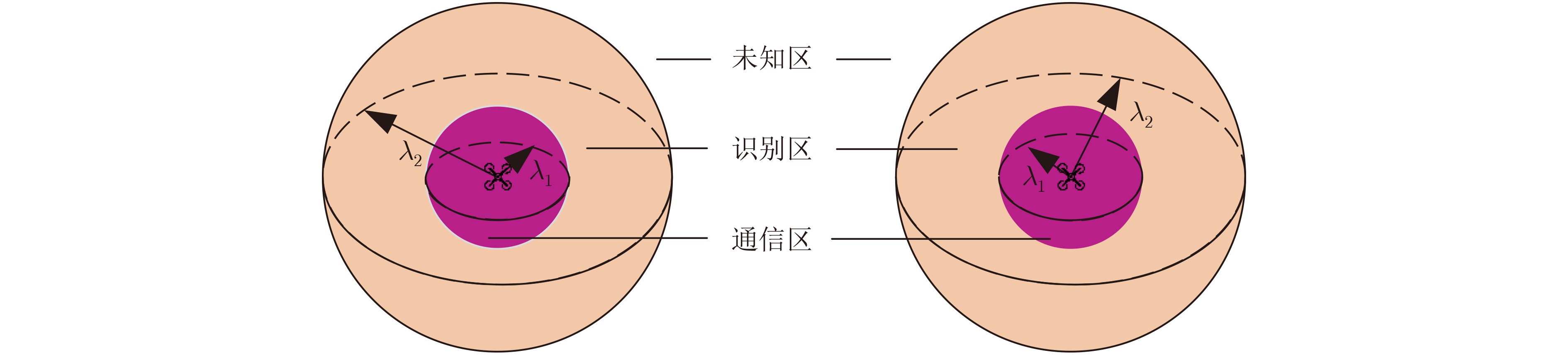
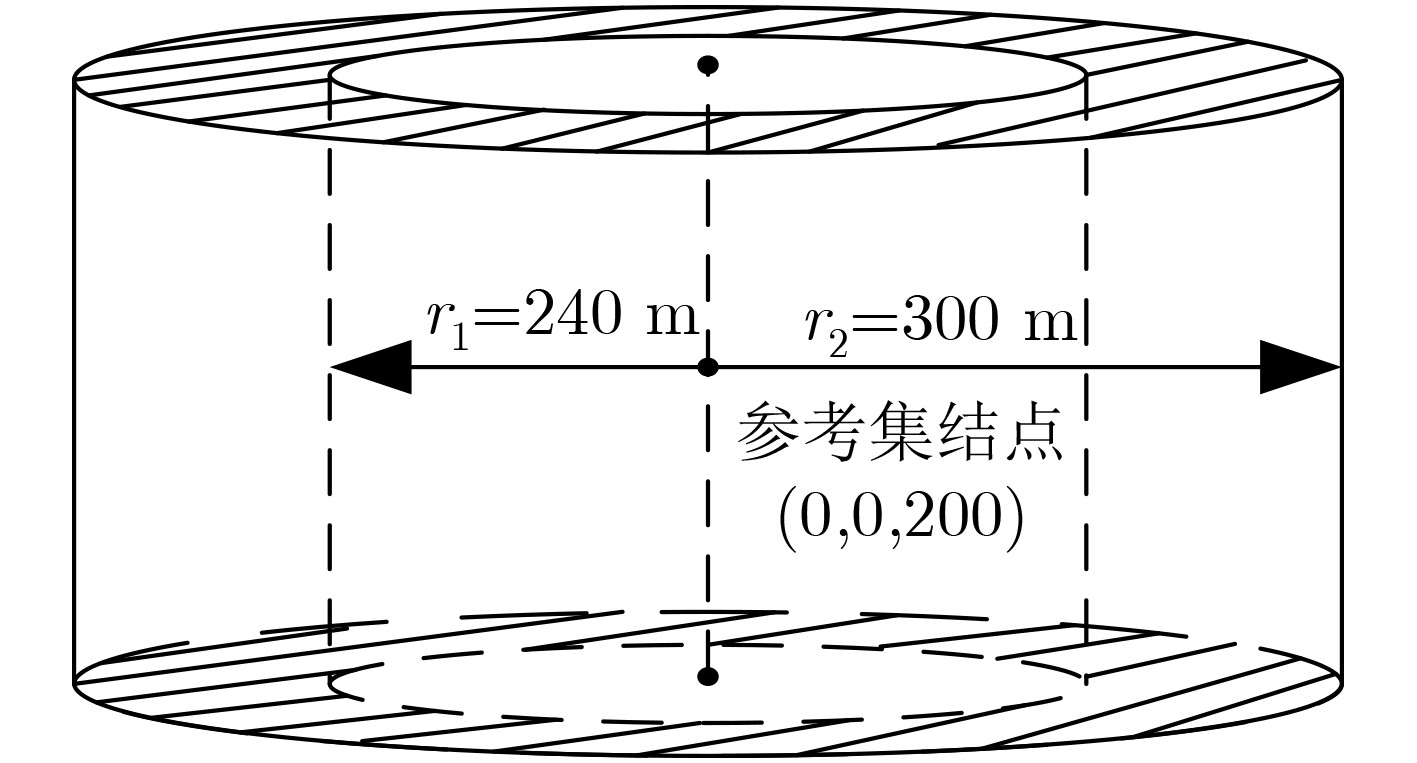
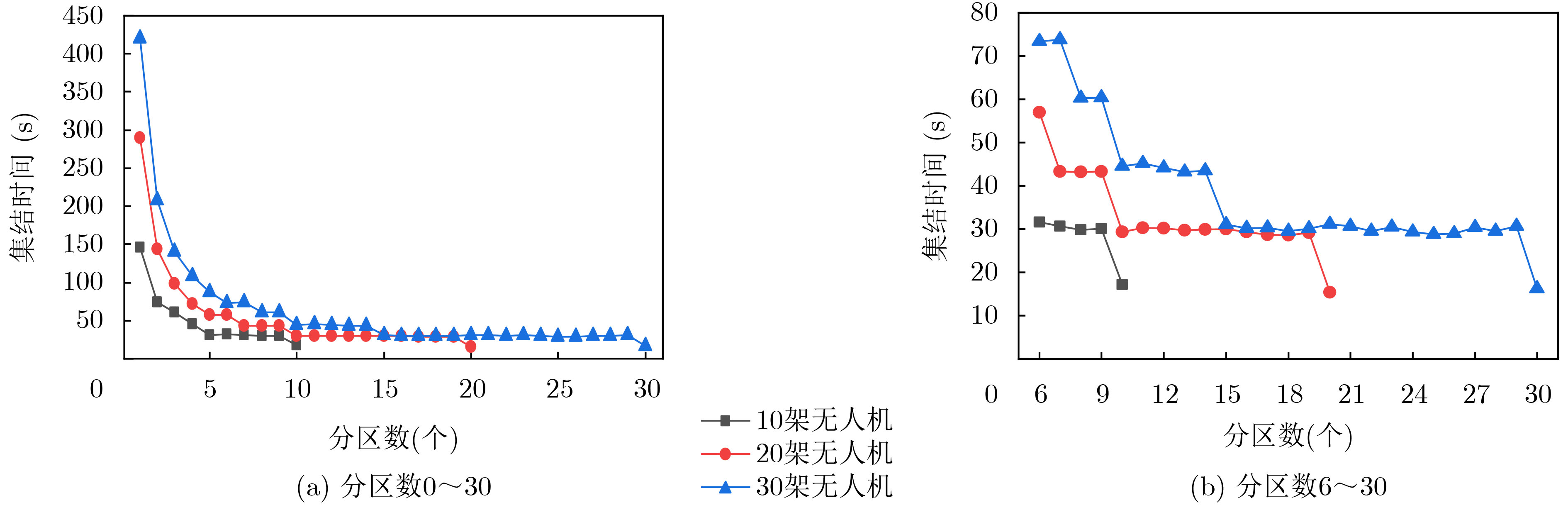
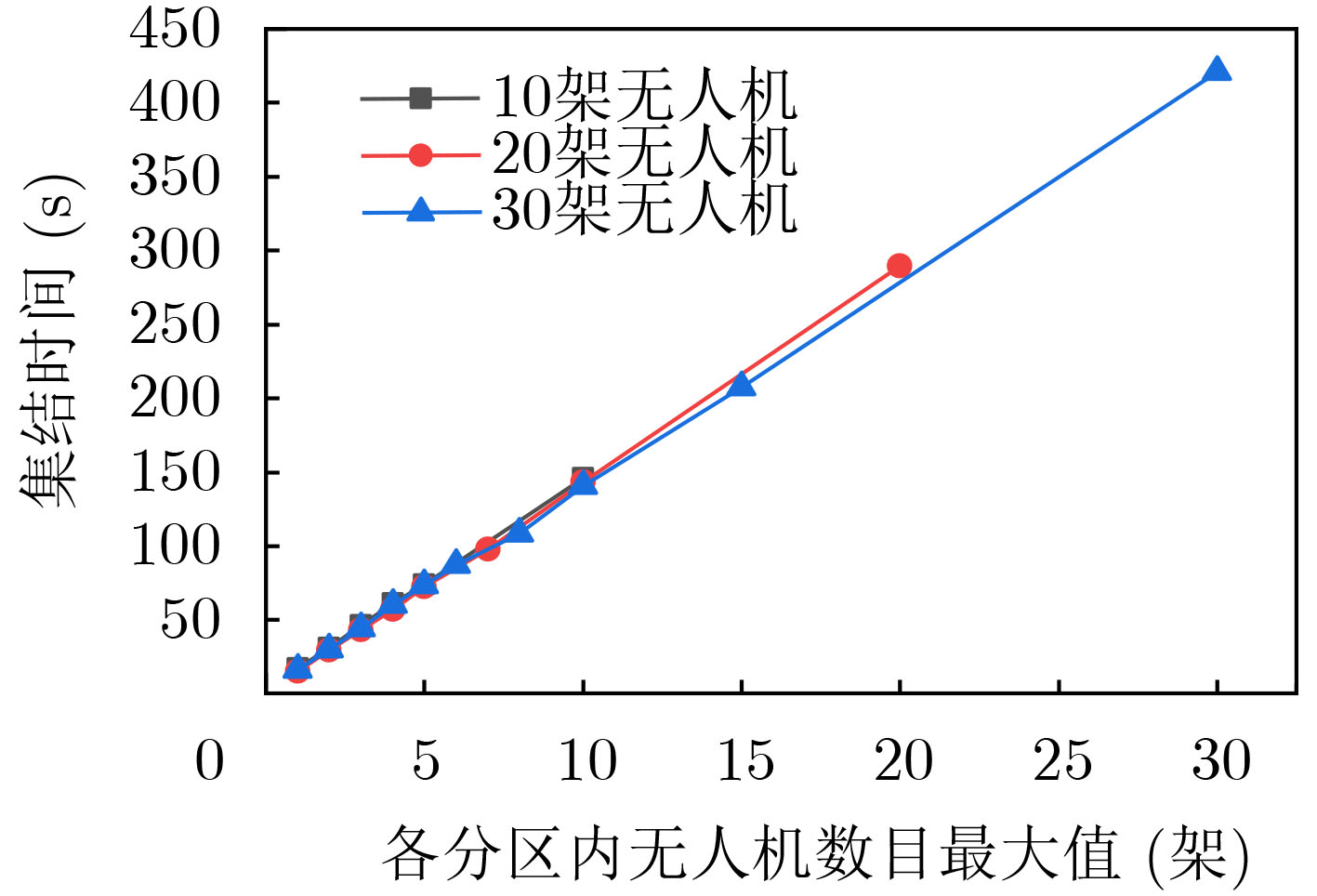
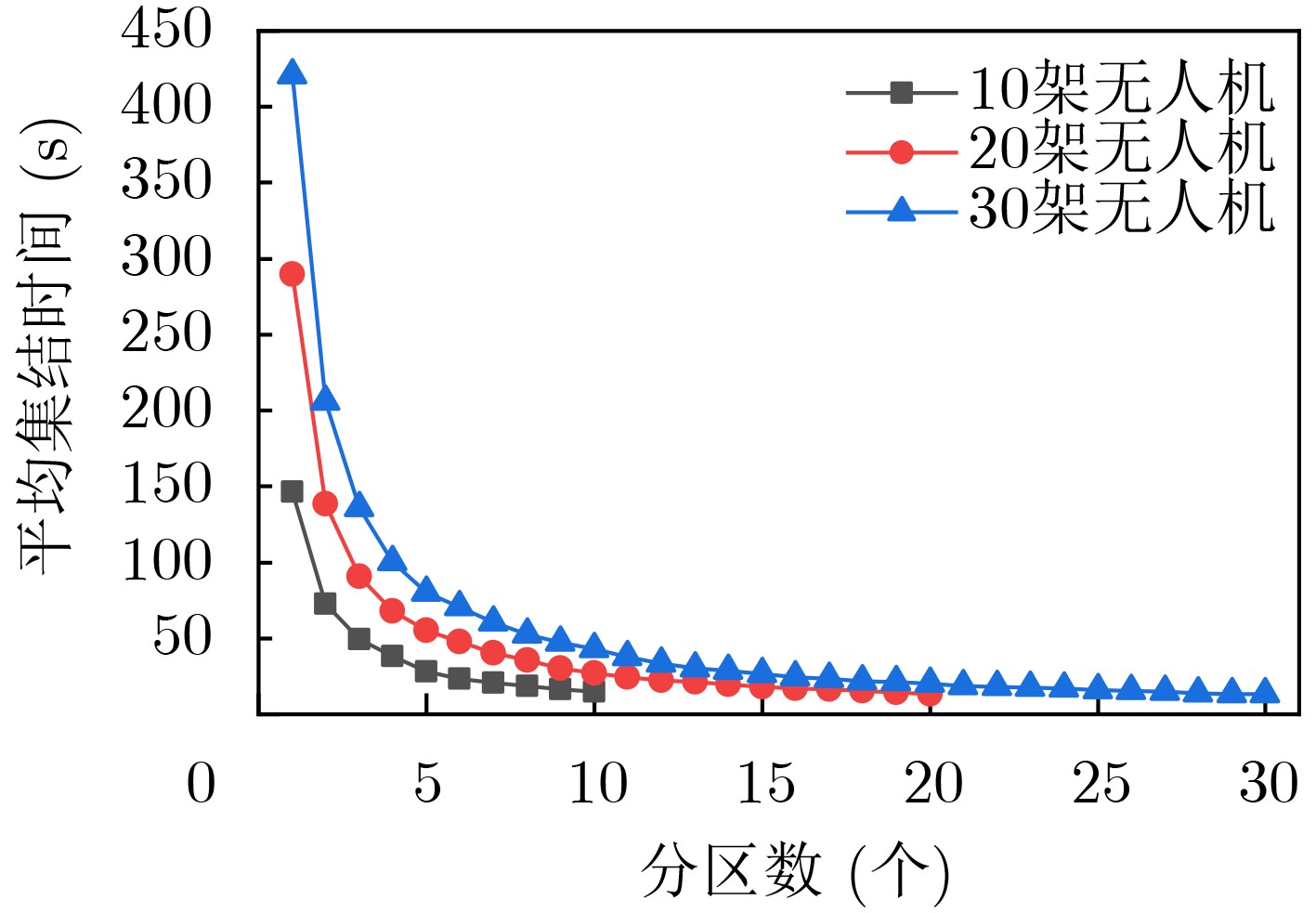
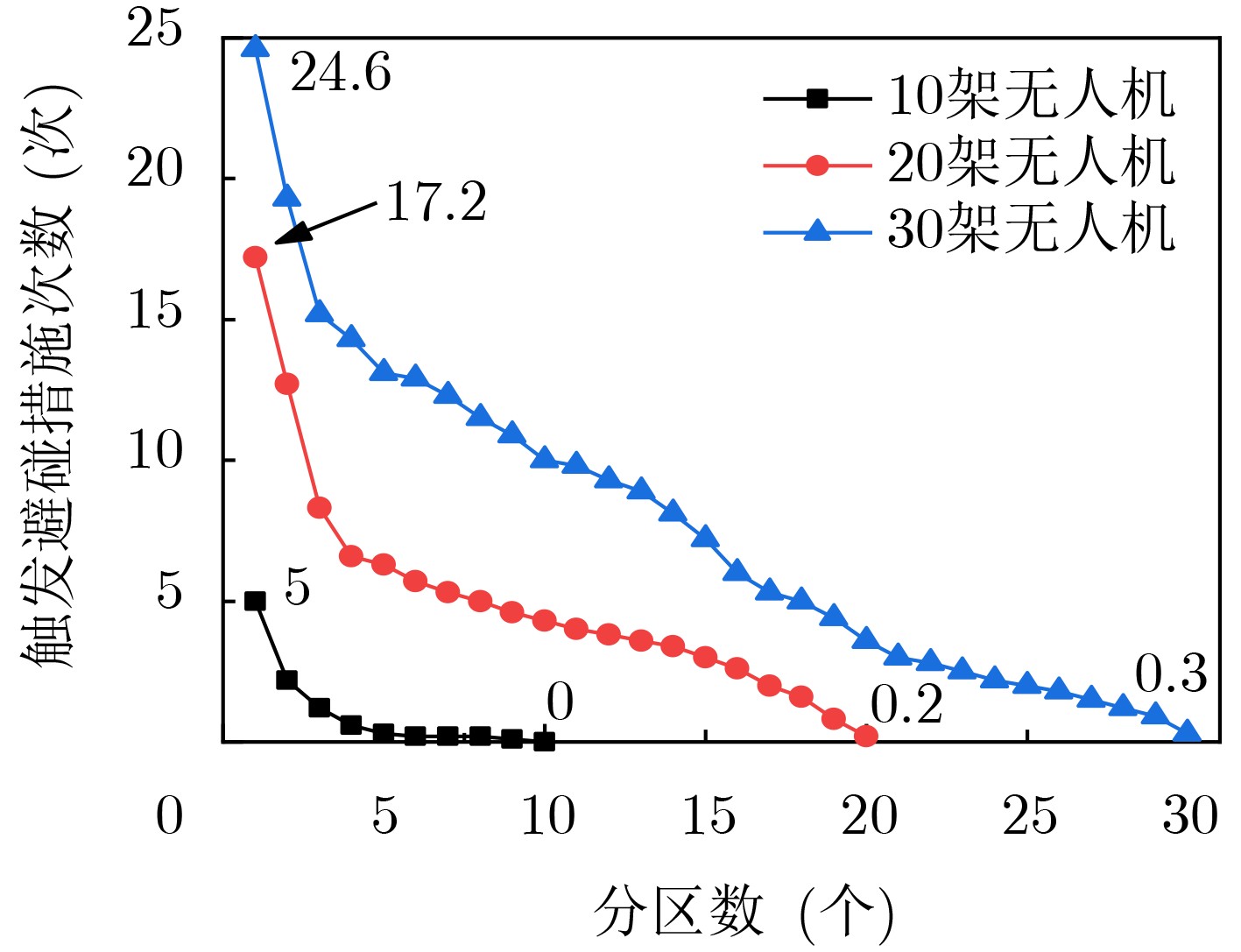
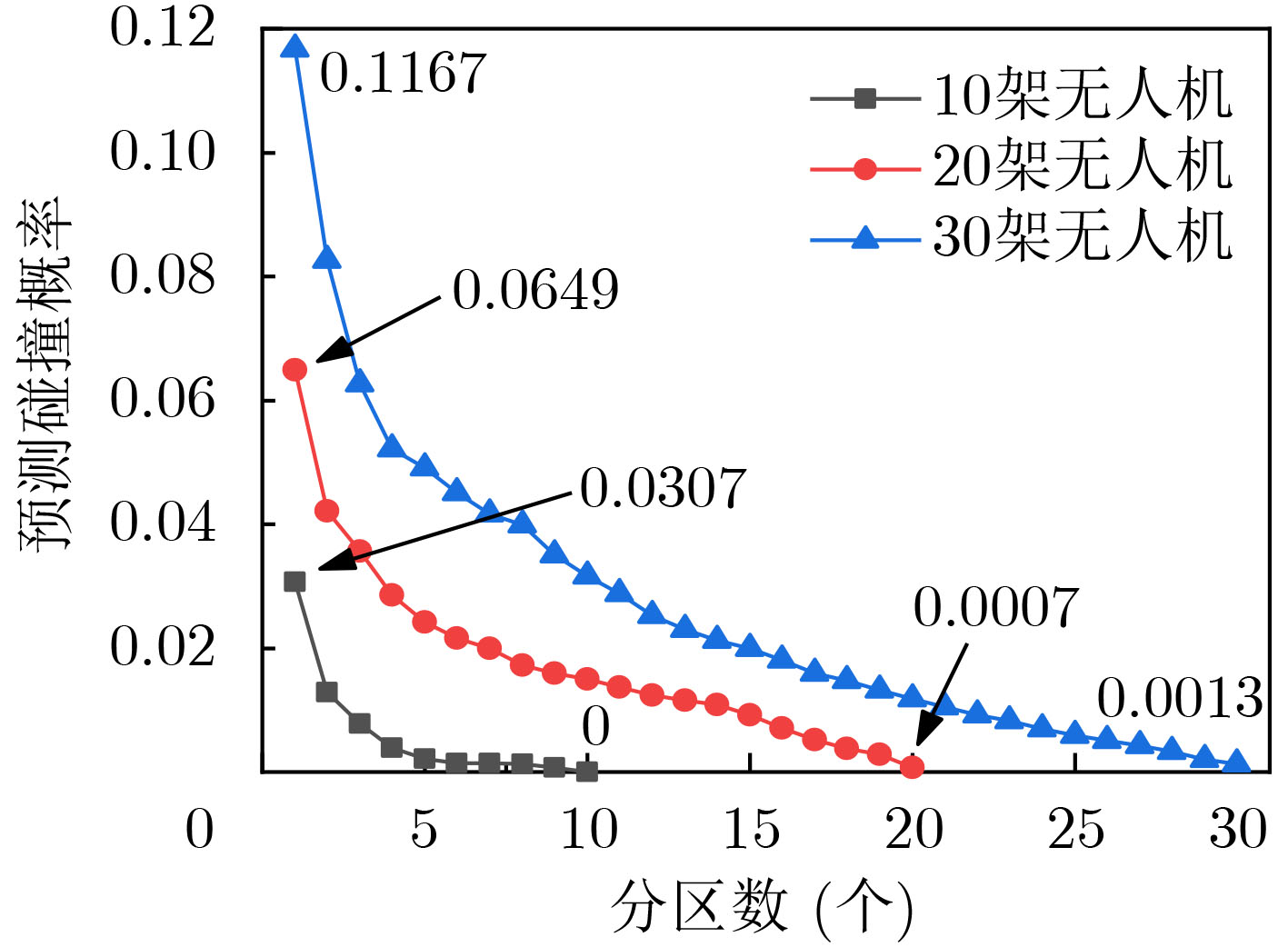
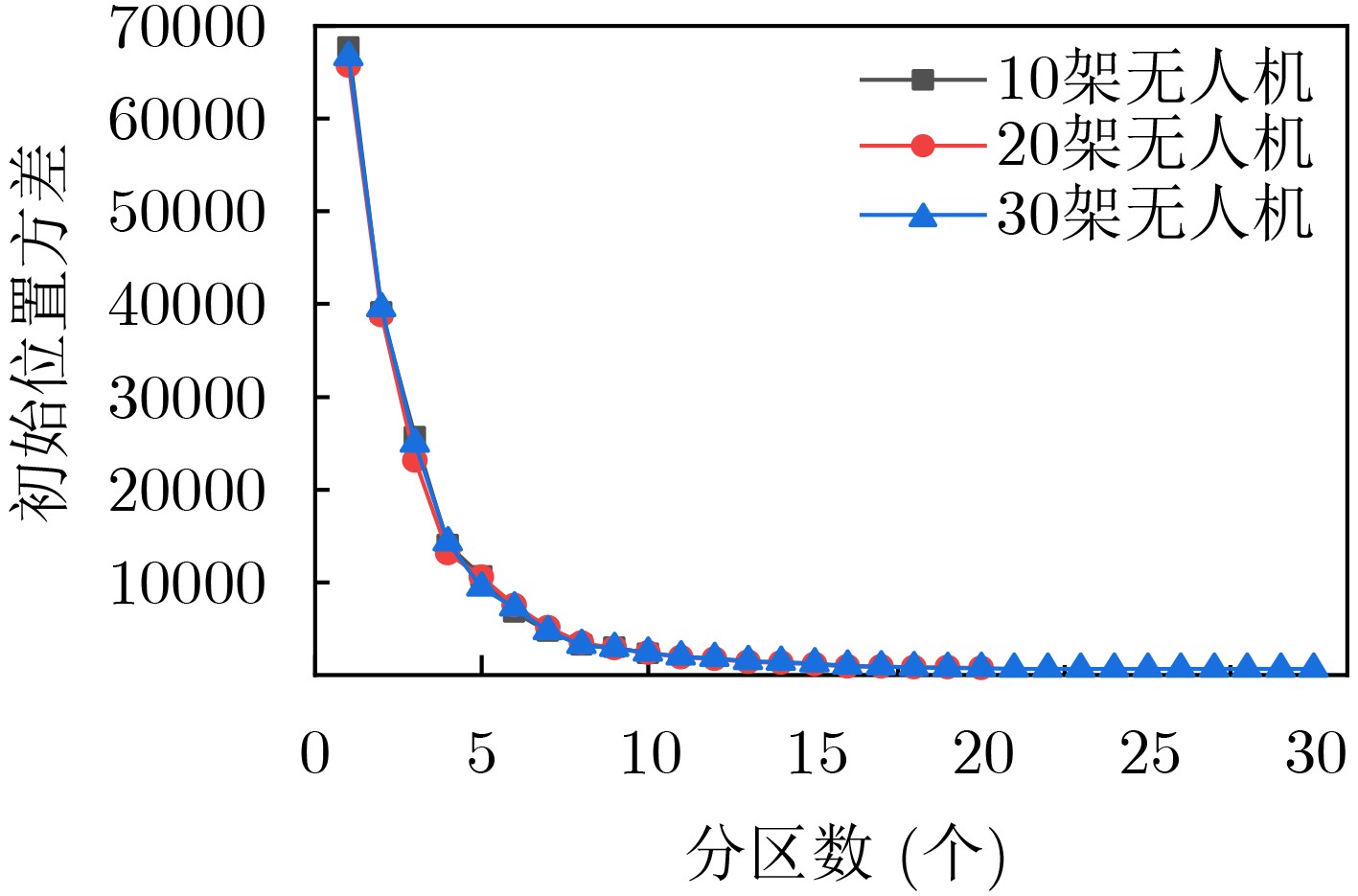
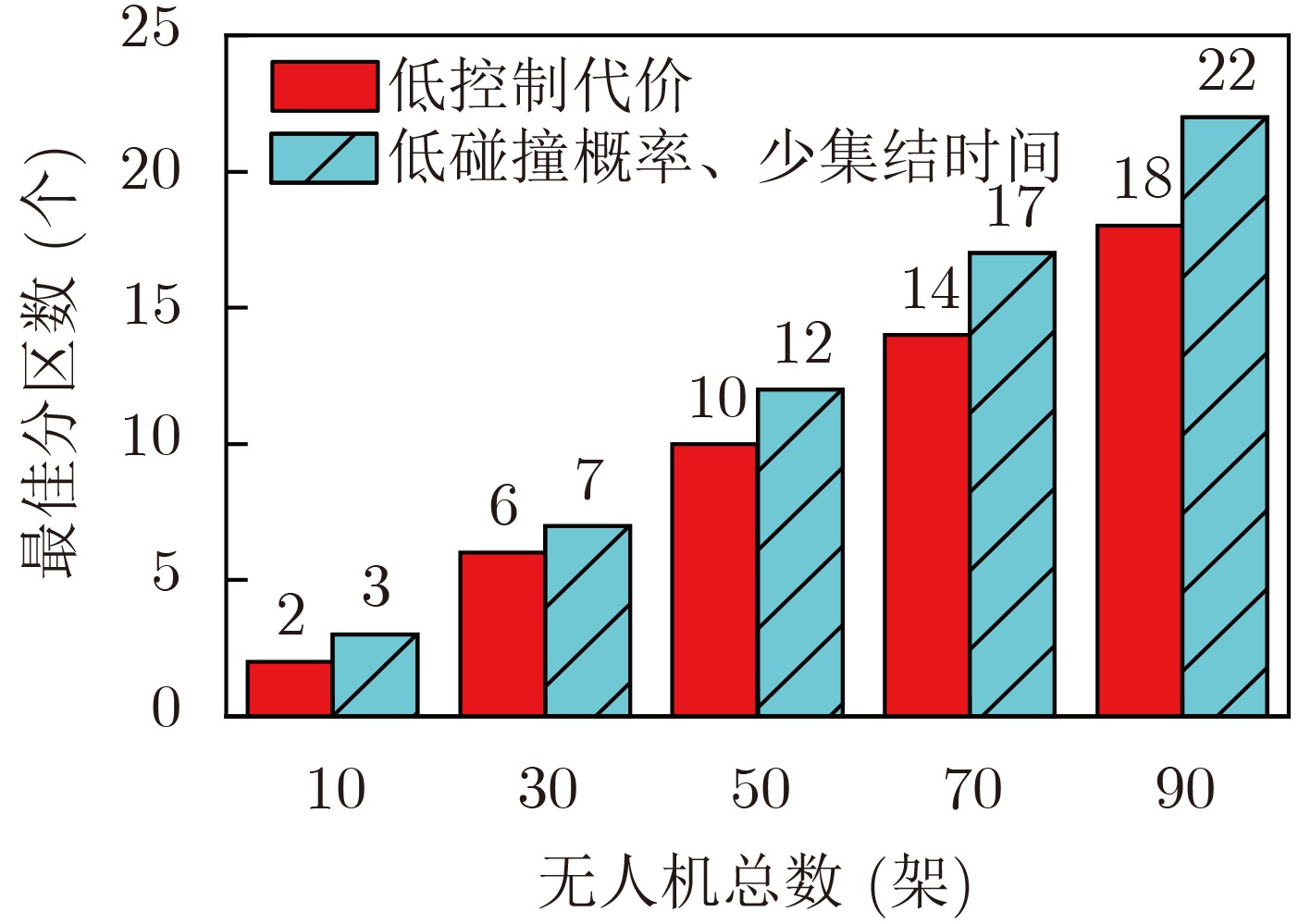
摘要: 针对无人机集群在特定场景下需要在指定区域安全、快速集结成指定队形的需求,该文提出了一种分区集结的控制策略。考虑无人机(UAV)的初始分布位置、集结区域以及编队图案等约束,为每架UAV分配目标集结点并使总航程尽量小。将近集结点区域等分为多个分区,不同分区内的UAV均按一定规则依次沿直线向所分配目标集结点航行,无多余航路能耗且互不影响。UAV间通过紫外光进行稳定的机间通信并共享已知信息实现集群内部信息共享。实验结果表明:随着分区数的增多,集群的集结时间呈阶梯型下降,阶梯高度与各分区所含UAV数目的最大值呈近似线性关系,预测碰撞概率逐渐降低接近于0,验证了所提方法的可行性和有效性。另外,根据实验结果得出的规律提出了一种依据不同需求选择最佳分区数的方法。Abstract: In order to make the Unmanned Aerial Vehicle (UAV) swarm arrival into the specified place quickly and safely, a control strategy of partition rendezvous is proposed. Considering the start distribution position of each UAV, rendezvous area and formation pattern, target rendezvous point are assigned for each UAV and the total range is minimized. The area near the rendezvous point is divided into several zones. UAVs in different zones travel in a straight line to the target rendezvous points in turn according to certain rules, without excess air route energy consumption and without mutual influence. UAVs communicate with each other stably through ultraviolet light, and share known information to realize information sharing within the swarm. The experimental results show that with the increase of the number of zones, the time taken to rendezvous decreases in a stepped manner. There is an approximate linear relationship between the height of the steps and the maximum number of UAVs in each zone, and the prediction of collision probability gradually decreases and finally approaches 0. In addition, a method to select optimal number of zones according to different needs is proposed.
-
Key words:
- Unmanned Aerial Vehicles (UAV) swarm /
- Ultraviolet communications /
- Rendezvous /
- Collide
-
[1] 朱华勇, 张庆杰, 沈林成. 提高无人作战飞机协同作战能力的关键技术[J]. 控制工程, 2010, 17(S1): 52–55. doi: 10.14107/j.cnki.kzgc.2010.s1.005ZHU Huayong, ZHANG Qingjie, and SHEN Lincheng. Technologies for promoting cooperatively combat capability of UCAV[J]. Control Engineering of China, 2010, 17(S1): 52–55. doi: 10.14107/j.cnki.kzgc.2010.s1.005 [2] 尹欣繁, 章贵川, 彭先敏, 等. 军用无人机技术智能化发展及应用[J]. 国防科技, 2018, 39(5): 30–34. doi: 10.13943/j.issn1671-4547.2018.05.06YIN Xinfan, ZHANG Guichuan, PENG Xianmin, et al. Intelligent development and application of military UAV technology[J]. Defense Technology Review, 2018, 39(5): 30–34. doi: 10.13943/j.issn1671-4547.2018.05.06 [3] 吴应斌. 多旋翼无人机在人防指挥通信中的应用[J]. 信息与电脑, 2019, 31(17): 181–182.WU Yingbin. Application of multi-rotor UAV in civil air defense command communication[J]. China Computer &Communication, 2019, 31(17): 181–182. [4] 张晋武. 无人机编队飞行技术研究[J]. 舰船电子工程, 2015, 35(8): 9–12. doi: 10.3969/j.issn1672-9730.2015.08.003ZHANG Jinwu. Technology of unmaned aerial vehicles (UAVs) formation flight[J]. Ship Electronic Engineering, 2015, 35(8): 9–12. doi: 10.3969/j.issn1672-9730.2015.08.003 [5] 赵太飞, 许杉, 屈瑶, 等. 基于无线紫外光隐秘通信的侦察无人机蜂群分簇算法[J]. 电子与信息学报, 2019, 41(4): 967–972. doi: 10.11999/JEIT180491ZHAO Taifei, XU Shan, QU Yao, et al. Cluster-based algorithm of reconnaissance uav swarm based on wireless ultraviolet secret communication[J]. Journal of Electronics &Information Technology, 2019, 41(4): 967–972. doi: 10.11999/JEIT180491 [6] 胡立群, 陈敦军, 张开骁. 基于单片机的可见光及紫外光强探测系统[J]. 电子设计工程, 2013, 21(24): 81–83, 86. doi: 10.3969/j.issn.1674-6236.2013.24.026HU Liqun, CHEN Dunjun, and ZHANG Kaixiao. The visible light and UV-light detection system based on microprocessor[J]. Electronic Design Engineering, 2013, 21(24): 81–83, 86. doi: 10.3969/j.issn.1674-6236.2013.24.026 [7] REYNOLDS C W. Flocks, herds and schools: A distributed behavioral model[J]. ACM SIGGRAPH Computer Graphics, 1987, 21(4): 25–34. doi: 10.1145/37401.37406 [8] DANIEL K, ROHDE S, GODDEMEIER N, et al. A communication aware steering strategy avoiding self-separation of flying robot swarms[C]. The 5th IEEE International Conference Intelligent Systems, London, UK, 2010: 254–259. doi: 10.1109/IS.2010.5548367. [9] GAZI V and PASSINO K M. Stability analysis of swarms[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 692–697. doi: 10.1109/TAC.2003.809765 [10] OLFATI-SABER R and MURRAY R M. Distributed cooperative control of multiple vehicle formations using structural potential functions[J]. IFAC Proceedings Volumes, 2002, 35(1): 495–500. doi: 10.3182/20020721-6-ES-1901.00244 [11] EASTHOPE P F. Tracking simulated UAV swarms using particle filters[C]. IET Conference on Data Fusion & Target Tracking 2014: Algorithms and Applications, Liverpool, UK, 2014, doi: 10.1049/cp.2014.0524. [12] 朱旭, 张逊逊, 尤谨语, 等. 基于信息一致性的无人机紧密编队集结控制[J]. 航空学报, 2015, 36(12): 3919–3929. doi: 10.7527/S1000-6893.2015.0165ZHU Xu, ZHANG Xunxun, YOU Jinyu, et al. Swarm control of UAV close formation based on information consensus[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3919–3929. doi: 10.7527/S1000-6893.2015.0165 [13] ALEJO D, COBANO J A, HEREDIA G, et al. Collision-free 4D trajectory planning in unmanned aerial vehicles for assembly and structure construction[J]. Journal of Intelligent and Robotic Systems, 2014, 73(1/4): 783–795. doi: 10.1007/s10846-013-9948-x [14] 倪良巧, 王道波, 蒋婉玥. 时间协同多无人机编队航迹规划[J]. 机械与电子, 2016, 34(2): 7–11. doi: 10.3969/j.issn.1001-2257.2016.02.002NI Liangqiao, WANG Daobo, and JIANG Wanyue. Multi UAV route planning based on time collaboration[J]. Machinery &Electronics, 2016, 34(2): 7–11. doi: 10.3969/j.issn.1001-2257.2016.02.002 [15] 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41(S1): 723738.JIA Yongnan, TIAN Siying, and LI Qing. Recent development of unmanned aerial vehicle swarms[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S1): 723738. [16] MILLIS J. Brownian movements and molecular reality[J]. Science, 1911, 33(846): 426–427. doi: 10.1126/science.33.846.426 [17] DESAI J P, OSTROWSKI J, and KUMAR V. Controlling formations of multiple mobile robots[C]. 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, 1998: 2864–2869. doi: 10.1109/ROBOT.1998.680621. [18] 朱旭. 基于信息一致性的多无人机编队控制方法研究[D]. [博士论文], 西北工业大学, 2014.ZHU Xu. Research on Multi-UAV formation control based on information consensus[D]. [Ph. D. dissertation], Northwestern Polytechnical University, 2014. [19] GAO Pu, LIUA H P, and GLUCH D P. On modelling, simulating and verifying a decentralized mission control algorithm for a fleet of collaborative UAVs[J]. Procedia Computer Science, 2012, 9: 792–801. doi: 10.1016/j.procs.2012.04.085 [20] 黄元秋, 王晶. 图的交叉数综述[J]. 华东师范大学学报(自然科学版), 2010(3): 68–80. doi: 10.3969/j.issn.1000-5641.2010.03.008HUANG Yuanqiu and WANG Jing. Survey of the crossing number of graphs[J]. Journal of East China Normal University (Natural Science) , 2010(3): 68–80. doi: 10.3969/j.issn.1000-5641.2010.03.008 [21] 常庭懋, 韩中庚. 用“匈牙利算法”求解一类最优化问题[J]. 信息工程大学学报, 2004, 5(1): 60–62. doi: 10.3969/j.issn.1671-0673.2004.01.019CHANG Tingmao and HAN Zhonggeng. Solution to a class optimization problem by utilizing the “Hungary calculate way”[J]. Journal of Information Engineering University, 2004, 5(1): 60–62. doi: 10.3969/j.issn.1671-0673.2004.01.019 [22] LA COUR-HARBO A, and SCHIØLER H. Probability of low-altitude midair collision between general aviation and unmanned aircraft[J]. Risk Analysis, 2019, 39(11): 2499–2513. doi: 10.1111/risa.13368 -


 下载:
下载:



图(12)
计量
- 文章访问数: 1673
- HTML全文浏览量: 936
- PDF下载量: 133
- 被引次数: 0
