

A Silent Location Algorithm for Underwater Sensor Network Based on Ray Acoustics
-
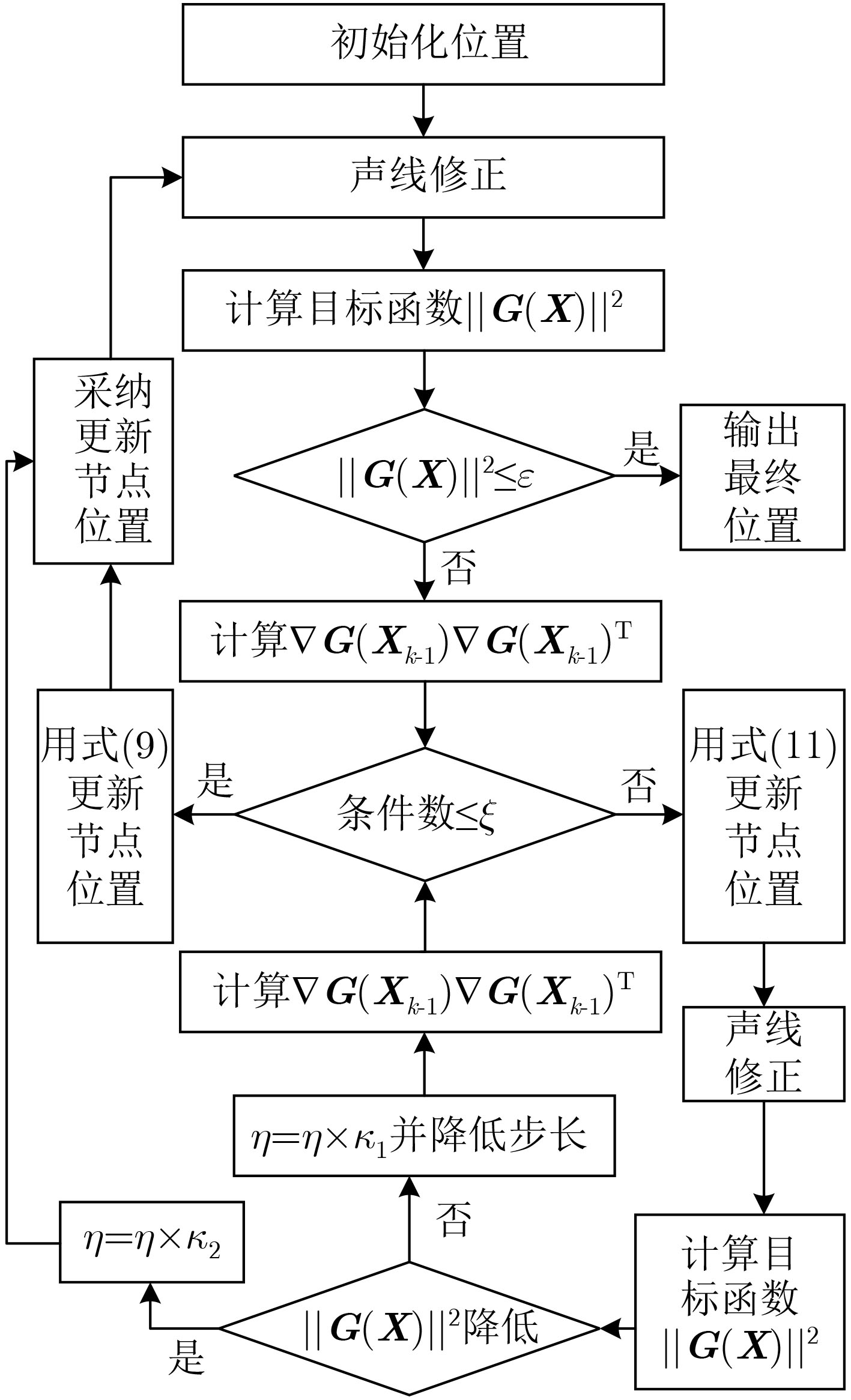
摘要: 水下传感网络静默定位方法是一种可服务于多用户的免时钟同步定位算法,待定位节点全程无需发声,具有隐蔽性强和方便扩展等优点。该文提出了一种结合声线跟踪技术的水下传感网络节点静默定位方法,将高斯-牛顿法引入到水下网络节点静默定位中,解决了已有方法存在定位盲区的问题。鉴于水中声速分布不均的情况,将声线跟踪技术融入迭代过程,用以修正声线弯曲带来的定位误差。同时,针对实际应用过程中可能出现的信标节点阵型不佳的情况,采用了改进的Tikhonov正则化方法,根据目标函数变化情况反馈控制正则化参数,消除了雅可比矩阵不满秩对迭代过程的影响。通过仿真分析,验证了该文算法的有效性。
-
关键词:
- 水下传感网络 /
- 静默定位 /
- 高斯-牛顿法 /
- 声线跟踪 /
- Tikhonov正则化
Abstract: The silent location algorithm for underwater sensor network is a time-synchronization free algorithm that can serve multiple users. No sound is needed of the target node in the whole process which make the algorithm secluded and extended. In this paper, a silent location algorithm for underwater sensor network based on ray-tracing technology is proposed. The problem of location blind area in the existing methods is solved by introducing the Gauss-Newton method into the algorithm proposed. In view of the uneven distribution of sound velocity in water, the ray-tracing technology is integrated into the iterative process to correct the positioning error caused by the bending of the sound ray. At the same time, considering the situation that the beacon node array may not be good in the practical application, an improved Tikhonov regularization method is adopted to control the regularization parameters according to the feedback of the iterative effect, which can compensate the influence of the singular Jacobian matrix on the objective function. The effectiveness of the proposed algorithm in this paper is verified by simulation analysis. -
孙大军, 郑翠娥, 崔宏宇, 等. 水下传感器网络定位技术发展现状及若干前沿问题[J]. 中国科学: 信息科学, 2018, 48(9): 1121–1136. doi: 10.1360/N112017-00262SUN Dajun, ZHENG Cuie, CUI Hongyu, et al. Developing status and some cutting-edge issues of underwater sensor network localization technology[J]. SCIENTIA SINICA Informationis, 2018, 48(9): 1121–1136. doi: 10.1360/N112017-00262 RAMEZANI H, JAMALI-RAD H, and LEUS G. Target localization and tracking for an isogradient sound speed profile[J]. IEEE Transactions on Signal Processing, 2013, 61(6): 1434–1446. doi: 10.1109/TSP.2012.2235432 LIU Jun, WANG Zhaohui, CUI Junhong, et al. A joint time synchronization and localization design for mobile underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2016, 15(3): 530–543. doi: 10.1109/TMC.2015.2410777 MORTAZAVI E, JAVIDAN R, DEHGHANI M J, et al. A robust method for underwater wireless sensor joint localization and synchronization[J]. Ocean Engineering, 2017, 137: 276–286. doi: 10.1016/j.oceaneng.2017.04.006 ZHENG Cuie, SUN Dajun, CAI Lin, et al. Mobile node localization in underwater wireless networks[J]. IEEE Access, 2018, 6: 17232–17244. doi: 10.1109/ACCESS.2018.2795600 蔡守桂. 结合声速反演的水声传感网络定位误差修正方法研究[D]. [硕士论文], 浙江大学, 2019: 26–51.CAI Shougui. Research on positioning error correction in underwater acoustic sensor network with sound speed inversion[D]. [Master dissertation], Zhejiang University, 2019: 26–51. ZHOU Zhong, PENG Zheng, CUI Junhong, et al. Scalable localization with mobility prediction for underwater sensor networks[J]. IEEE Transactions on Mobile Computing, 2011, 10(3): 335–348. doi: 10.1109/TMC.2010.158 曹俊, 郑翠娥, 孙大军, 等. AUV直线航迹下的单信标测距定位[J]. 哈尔滨工程大学学报, 2017, 38(5): 733–738. doi: 10.11990/jheu.201512093CAO Jun, ZHENG Cuie, Sun Dajun, et al. AUV positioning based on single-beacon ranging in straight-line trajectory[J]. Journal of Harbin Engineering University, 2017, 38(5): 733–738. doi: 10.11990/jheu.201512093 JIN Bonan, XU Xiaosu, ZHU Yongyun, et al. Single-source aided semi-autonomous passive location for correcting the position of an underwater vehicle[J]. IEEE Sensors Journal, 2019, 19(9): 3267–3275. doi: 10.1109/JSEN.2019.2892840 CHEPURI S P, RAJAN R T, LEUS G, et al. Joint clock synchronization and ranging: Asymmetrical time-stamping and passive listening[J]. IEEE Signal Processing Letters, 2013, 20(1): 51–54. doi: 10.1109/LSP.2012.2222371 韩云峰. 大规模水下传感器网络节点精确定位技术研究[D]. [博士论文], 哈尔滨工程大学, 2016: 16–39.HAN Yunfeng. Research on large scale underwater sensor network node accurate localization[D]. [Ph. D. dissertation], Harbin Engineering University, 2016: 16–39. CHENG Xiuzhen, SHU Haining, LIANG Qilian, et al. Silent positioning in underwater acoustic sensor networks[J]. IEEE Transactions on Vehicular Technology, 2008, 57(3): 1756–1766. doi: 10.1109/TVT.2007.912142 TAN H, GABOR A F, EU Z A, et al. A Wide Coverage Positioning System (WPS) for underwater localization[C]. 2010 IEEE International Conference on Communications, Cape Town, South Africa, 2010: 1–5. CARROLL P, MAHMOOD K, ZHOU Shengli, et al. On-demand asynchronous localization for underwater sensor networks[J]. IEEE Transactions on Signal Processing, 2014, 62(13): 3337–3348. doi: 10.1109/TSP.2014.2326996 蒋俊正, 李杨剑, 赵海兵, 等. 一种大规模传感器网络节点分布式定位算法[J]. 电子与信息学报, 2019, 41(12): 3022–3028. doi: 10.11999/JEIT181101JIANG Junzheng, LI Yangjian, ZHAO Haibing, et al. A distributed node localization algorithm for large scale sensor networks[J]. Journal of Electronics &Information Technology, 2019, 41(12): 3022–3028. doi: 10.11999/JEIT181101 BERTSEKAS D P. Nonlinear Programming[M]. Belmont, USA: Athena Scientific, 1999: 22–108. 李昭. 贝叶斯反演在高精度水声定位中的应用研究[D]. [博士论文], 哈尔滨工程大学, 2016: 26–33.LI Zhao. Research on application of Bayesian inversion in high-accuracy underwater localization[D]. [Ph. D. dissertation], Harbin Engineering University, 2016: 26–33. 曹俊, 郑翠娥, 孙大军, 等. 系数矩阵正定的单信标测距定位算法[J]. 电子与信息学报, 2017, 39(4): 981–988. doi: 10.11999/JEIT160604CAO Jun, ZHENG Cuie, Sun Dajun, et al. A single beacon location algorithm with positive definite coefficient matrix[J]. Journal of Electronics &Information Technology, 2017, 39(4): 981–988. doi: 10.11999/JEIT160604 KIDO M, OSADA Y, and FUJIMOTO H. Temporal variation of sound speed in ocean: A comparison between GPS/acoustic and in situ measurements[J]. Earth, Planets and Space, 2008, 60(3): 229–234. doi: 10.1186/BF03352785 -


 下载:
下载:



图(6)
计量
- 文章访问数: 1718
- HTML全文浏览量: 579
- PDF下载量: 116
- 被引次数: 0
