

A Low Complexity Two-demensional DOA Joint Estimation Algorithm Based on Parallel Coprime Virtual Array
-
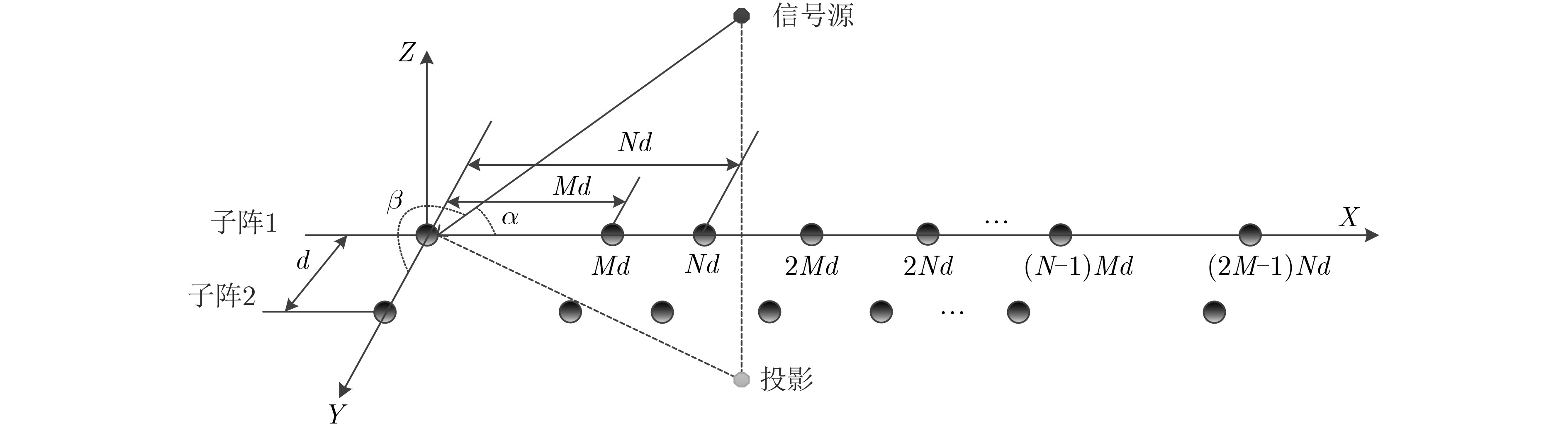
摘要: 针对传统平行阵列2维测向自由度低、分辨能力差和小快拍情况下估计误差大等问题,该文提出基于平行互质虚拟阵列的低复杂度2维波达角(DOA)估计算法。该算法利用两个相互平行的互质线阵扩展生成虚拟阵列,并通过协方差矩阵和互协方差矩阵构造具有增强2维角度自由度的扩展矩阵,最后通过奇异值分解(SVD)和旋转不变技术(ESPRIT)获得自动匹配的2维角度估计。相比于传统的2维DOA估计方法,所提算法更好地利用了阵列接收数据信息,能识别更多的入射信号,分辨能力高,不需要进行2维线性搜索或者角度参数匹配,在低信噪比 (SNR)和小快拍情况下也有很好的估计效果。实验仿真结果验证了提出算法的有效性和可靠性。Abstract: There are more and more problems for the two-Dimensional (2D) direction finding with traditional parallel arrays, such as low degree of freedom, low resolution and large estimation errors with small snapshots, etc. In view of these problems and based on the parallel coprime virtual array, a low-complexity 2D Direction Of Arrival (DOA) algorithm is proposed in this paper. In the proposed algorithm, a virtual array is generated by the the expansion of two mutually parallel linear arrays. Then an extended matrix with high degrees of freedom of the 2D angular is constructed by the autocovariance matrix and cross-covariance matrix. Finally, the automatically matched 2D-DOA estimation is obtained by the Singular Value Decomposition (SVD) and Estimating Signal Parameters via Rotational Invariance Techniques (ESPRIT). Compared with the traditional two-dimensional DOA estimation methods, the proposed algorithm utilizes more information from the received data of the array, can distinguish more incident signals with high resolution. Meanwhile, the proposed algorithm needs no 2D linear searching or angular parameter matching and is with good performance under low Signal-to-Noise Ratio (SNR) and small snapshot. Experimental simulation results demonstrate the correctness and validity of the algorithm.
-
[1] ZHANG Wei, LIU Wei, WANG Ju, et al. Computationally efficient 2-D DOA estimation for uniform rectangular arrays[J]. Multidimensional Systems and Signal Processing, 2014, 25(4): 847–857. doi: 10.1007/s11045-013-0267-y [2] GU Jianfeng and WEI Ping. Joint SVD of two cross-correlation matrices to achieve automatic pairing in 2-D angle estimation problems[J]. IEEE Antennas and Wireless Propagation Letters, 2007, 6: 553–556. doi: 10.1109/LAWP.2007.907913 [3] GU Jianfeng, ZHU Weiping, and SWAMY M N S. Joint 2-D DOA estimation via sparse L-shaped array[J]. IEEE Transactions on Signal Processing, 2015, 63(5): 1171–1182. doi: 10.1109/tsp.2015.2389762 [4] LI Jianfeng, ZHANG Xiaofei, and CHEN Han. Improved two-dimensional DOA estimation algorithm for two-parallel uniform linear arrays using propagator method[J]. Signal Processing, 2012, 92(12): 3032–3038. doi: 10.1016/j.sigpro.2012.06.010 [5] MOFFET A. Minimum-redundancy linear arrays[J]. IEEE Transactions on Antennas and Propagation, 1968, 16(2): 172–175. doi: 10.1109/TAP.1968.1139138 [6] 杨杰, 廖桂生. 基于空域稀疏性的嵌套MIMO雷达DOA估计算法[J]. 电子与信息学报, 2014, 36(11): 2698–2704. doi: 10.3724/SP.J.1146.2013.01900YANG Jie and LIAO Guisheng. A spatial sparsity-based DOA estimation method in nested MIMO radar[J]. Journal of Electronics &Information Technology, 2014, 36(11): 2698–2704. doi: 10.3724/SP.J.1146.2013.01900 [7] VAIDYANATHAN P P and PAL P. Sparse sensing with Co-prime samplers and arrays[J]. IEEE Transactions on Signal Processing, 2011, 59(2): 573–586. doi: 10.1109/TSP.2010.2089682 [8] PAL P and VAIDYANATHAN P P. Nested arrays in two dimensions, part I: Geometrical considerations[J]. IEEE Transactions on Signal Processing, 2012, 60(9): 4694–4705. doi: 10.1109/TSP.2012.2203814 [9] PAL P and VAIDYANATHAN P P. Nested arrays in two dimensions, part II: Application in two dimensional array processing[J]. IEEE Transactions on Signal Processing, 2012, 60(9): 4706–4718. doi: 10.1109/tsp.2012.2203815 [10] FENG Mingyue, HE Minghao, HAN Jun, et al. 2-D DOA estimation using off-grid sparse learning via iterative minimization with L-parallel coprime array[J]. Chinese Journal of Electronics, 2018, 27(6): 1322–1328. doi: 10.1049/cje.2017.11.002 [11] ELBIR A M. L-shaped coprime array structures for DOA estimation[J]. Multidimensional Systems and Signal Processing, 2020, 31: 205–219. doi: 10.1007/s11045-019-00657-4 [12] QIN Si, ZHANG Y D, and AMIN M G. Two-dimensional DOA estimation using parallel coprime subarrays[C]. 2016 IEEE Sensor Array and Multichannel Signal Processing Workshop (SAM), Rio de Janerio, Brazil, 2016: 1–4. doi: 10.1109/SAM.2016.7569635. [13] QIN Si, ZHANG Y D, and AMIN M G. Improved two-dimensional DOA estimation using parallel coprime arrays[J]. Signal Processing, 2020, 172: 107428. doi: 10.1016/j.sigpro.2019.107428 [14] LI Jianfeng, LI Yunxiang, and ZHANG Xiaofei. Two-Dimensional off-grid DOA estimation using unfolded parallel coprime array[J]. IEEE Communications Letters, 2018, 22(12): 2495–2498. doi: 10.1109/LCOMM.2018.2872955 [15] 谭伟杰, 冯西安. 基于稀疏表示的平行互素阵二维测向方法[J]. 系统工程与电子技术, 2019, 41(5): 937–943. doi: 10.3969/j.issn.1001-506X.2019.05.01TAN Weijie and FENG Xi’an. Sparsity-based two dimensional direction-finding method for parallel co-prime arrays[J]. Systems Engineering and Electronics, 2019, 41(5): 937–943. doi: 10.3969/j.issn.1001-506X.2019.05.01 [16] 杨旭东, 刘鲁涛, 李利. L型结构的互质阵列二维波达方向估计[J]. 西安交通大学学报, 2020, 54(2): 144–149, 188. doi: 10.7652/xjtuxb202002018YANG Xudong, LIU Lutao, and LI Li. A method for estimating 2D direction of arrival based on coprime array with L-shaped structure[J]. Journal of Xi’an Jiaotong University, 2020, 54(2): 144–149, 188. doi: 10.7652/xjtuxb202002018 [17] QIN Si, ZHANG Yimin, and AMIN M G. Generalized coprime array configurations for direction-of-arrival estimation[J]. IEEE Transactions on Signal Processing, 2015, 63(6): 1377–1390. doi: 10.1109/TSP.2015.2393838 -

 下载:
下载:


图(5) / 表(1)
计量
- 文章访问数: 2254
- HTML全文浏览量: 1179
- PDF下载量: 119
- 被引次数: 0
