

Target Echo Enhancement under Moving Platform Reverberation Using Low-Rank and Sparse Decomposition
-
摘要: 在水下航行器等运动平台上,主动声呐的近距离滤波结果受混响干扰影响严重,大量的混响回波亮点会掩蔽目标回波的可见性,导致后续检测判决的虚警率增大。以阵列处理的方位历程图作为基本输入,该文利用某些场景下混响干扰相邻周期间潜在的相干结构,假设混响满足低秩性;由于平台间的相对运动,假设感兴趣的目标回波在逐周期间是不相关且稀疏的。之后,将方位历程图表示为低秩的混响、稀疏的运动目标回波和噪声成分,在此基础上提出以加速近端梯度法(APG)和快速数据投影法(FDPM)分别实现离线和在线的低秩稀疏分解,从而实现混响抑制和目标回波增强。试验结果验证了假设模型的有效性,并且两种分解算法均能有效地增强目标回波。Abstract: For the underwater moving platforms, the near-range filtering of active sonar is seriously affected by reverberation disturbance. Usually, the real target echo will be masked by numerous reverberation highlights, which will greatly increase the false alarm rate of subsequent detection. Among adjacent periods of the bearing-time-record from array processing in some scenarios, this paper utilizes the potential coherent structure of reverberation, and then assumes that reverberation component satisfies the low-rank property. In addition, the relative motion may assume that target echoes of interest are irrelevant and sparse. Accordingly, the bearing-time-record can be decomposed as low-rank reverberation, sparse moving target echo and noise components. To suppress reverberation and enhance target echoes, the Accelerated Proximal Gradient(APG) and Fast Data Projection Method(FDPM) are proposed to realize offline and online decomposition, respectively. The experimental results validate the assumed models, and both approaches can effectively enhance target echoes.
-
表 1 用于求解低秩稀疏矩阵分解问题的APG算法
输入:离线数据矩阵${{X}} \in {\mathbb{R}^{M \times N}}$ 输出:低秩矩阵${{L}} = {{{L}}_{{n_{\rm{e}}}}}$,稀疏矩阵${{S}} = {{{S}}_{{n_{\rm{e}}}}}$ 非负参数:$\lambda $, ${\mu _{\rm{1}}}$, $\bar \mu $, $\delta < {\rm{1}}$, $\eta < {\rm{1}}$, $L \ge {L_f}$, $\varepsilon $, ${\rm{maxIter}}$ 初始化:${ {{L} }_{\rm{0} } } = { {{L} }_{\rm{1} } } = {{{\textit{0}}}}$, ${ {{S} }_{\rm{0} } } = { {{S} }_{\rm{1} } } = {{{\textit{0}}} }$, ${t_{\rm{0}}} = {t_{\rm{1}}} = {\rm{1}}$, $\bar \mu = \delta {\mu _{\rm{1}}}$, ${n_{\rm{e}}} = n = {\rm{1}}$ (1) while $n \le {\rm{maxIter} }$ 与 $\left\| {{{X}} - {{{L}}_n} - {{{S}}_n}} \right\|_{\rm{F}}^{\rm{2}} > \varepsilon $ (2) ${{Z}}_n^{{L}} = {{{L}}_n} + \dfrac{{{t_{n - {\rm{1}}}} - {\rm{1}}}}{{{t_n}}}\left( {{{{L}}_n} - {{{L}}_{n - {\rm{1}}}}} \right)$, ${{Z}}_n^{{S}} = {{{S}}_n} + \dfrac{{{t_{n - {\rm{1}}}} - {\rm{1}}}}{{{t_n}}}\left( {{{{S}}_n} - {{{S}}_{n - {\rm{1}}}}} \right)$ (3) ${{A}}_n^{{L}} = {{Z}}_n^{{L}} - {{({{Z}}_n^{{L}} + {{Z}}_n^{{S}} - {{X}})} / L}$, $\left[ {{{{V}}_n},{{{D}}_n}} \right] = {\rm{eig}}\left[ {{{({{A}}_n^{{L}})}^{\rm{T}}}{{A}}_n^{{L}}} \right]$, ${{{\Sigma }}_n} = {{D}}_n^{{{\rm{1}} / {\rm{2}}}}$, ${{{U}}_n} = {{A}}_n^{{L}}{{{V}}_n}{{\Sigma }}_n^{{\rm{ - 1}}}$, ${{{L}}_{n + {\rm{1}}}} = {{{U}}_n}{T_{{{{\mu _n}} / L}}}({{{\Sigma }}_n}){{V}}_n^{\rm{T}}$ (4) ${{A}}_n^{{S}} = {{Z}}_n^{{S}} - {{({{Z}}_n^{{L}} + {{Z}}_n^{{S}} - {{X}})} / L}$, ${{{S}}_{n + {\rm{1}}}} = {T_{{{{\mu _n}\lambda } / L}}}({{A}}_n^{{S}})$ (5) ${t_{n + {\rm{1}}}} = {{\left( {1 + \sqrt {4t_n^2 + 1} } \right)} / {\rm{2}}}$, ${\mu _{n + 1}} = \max (\eta {\mu _n},\bar \mu )$, ${n_{\rm{e}}} = n = n + 1$ (6) end  下载: 导出CSV
下载: 导出CSV
表 2 用于求解低秩稀疏在线分解问题的FDPM算法
输入:快拍数据向量${{x}}[n] \in {\mathbb{R}^{M \times 1}}$ 输出:低秩成分${{l}}[n]$,稀疏成分${{s}}[n]$ 非负参数:秩$r$,稀疏度$k$, $0 < \bar \mu \le 1$,或$0 < \varepsilon < 1$和$\sigma _{\tilde{ x}}^{\rm{2}}[{\rm{0}}]$ 初始化:${{{U}}_{\rm{0}}}$ (1) for $n = 1:N$ (2) $\tilde{ x}[n] = {{x}}[n]$, ${{r}}[n] = {{U}}_{n - {\rm{1}}}^{\rm{T}}\tilde{ x}[n]$ (3) $\mu $ from 式(11), ${ {{T} }_n} = { {{U} }_{n - {\rm{1} } } } + \mu \tilde{ x}[n]{{r} }^{\rm{T} }{[n] }$ (4) ${{a}}[n] = {{r}}[n] - \left\| {{{r}}[n]} \right\|{{{e}}_{\rm{1}}}$, ${{{P}}_n} = {{{T}}_n} - \left( {{{\rm{2}} / {{{\left\| {{{a}}[n]} \right\|}^{\rm{2}}}}}} \right) $
$({ {{T} }_n}{{a} }[n]){{a} }^{\rm{T} }{[n] }$, ${{{U}}_n} = {\rm{normalize}}\{ {{{P}}_n}\} $(5) ${{l}}[n] = {{{U}}_n}{{U}}_n^{\rm{T}}\tilde{ x}[n]$, ${{s}}[n] = {P_\Omega }({{x}}[n] - {{l}}[n])$,
${{g}}[n] = {{x}}[n] - {{l}}[n] - {{s}}[n]$(6) end
下载: 导出CSV
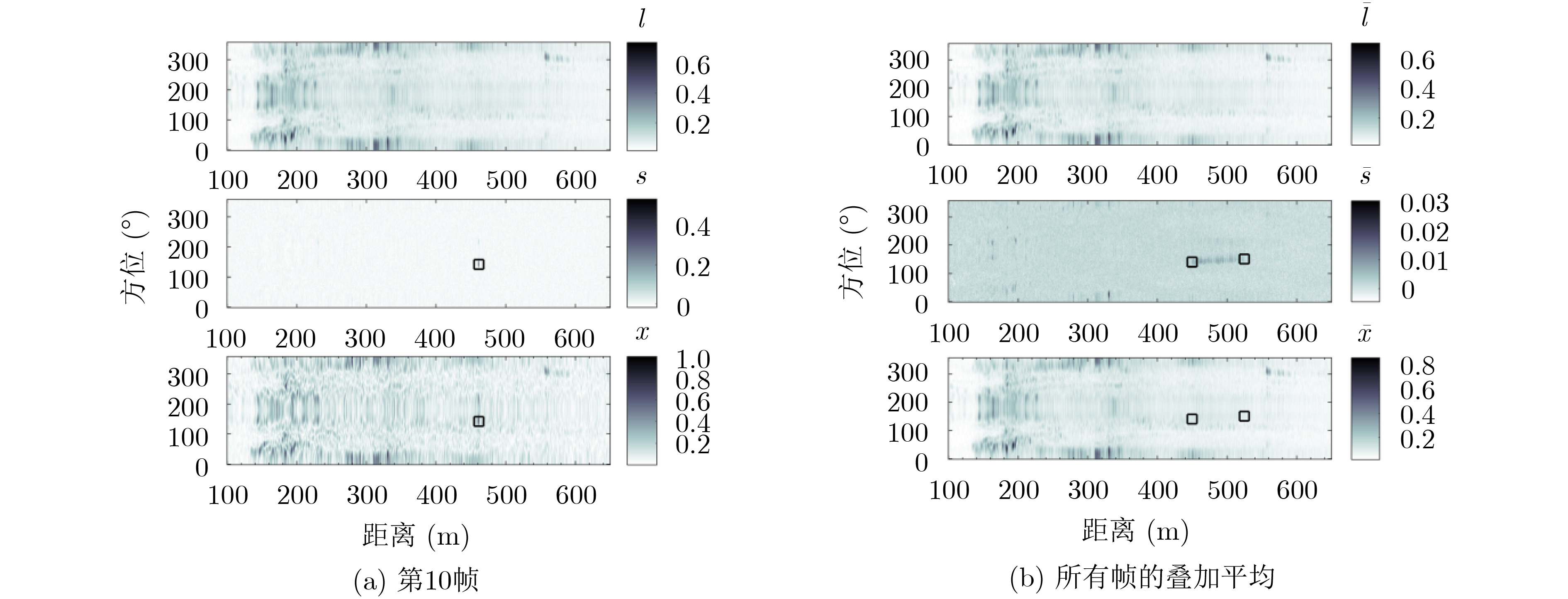
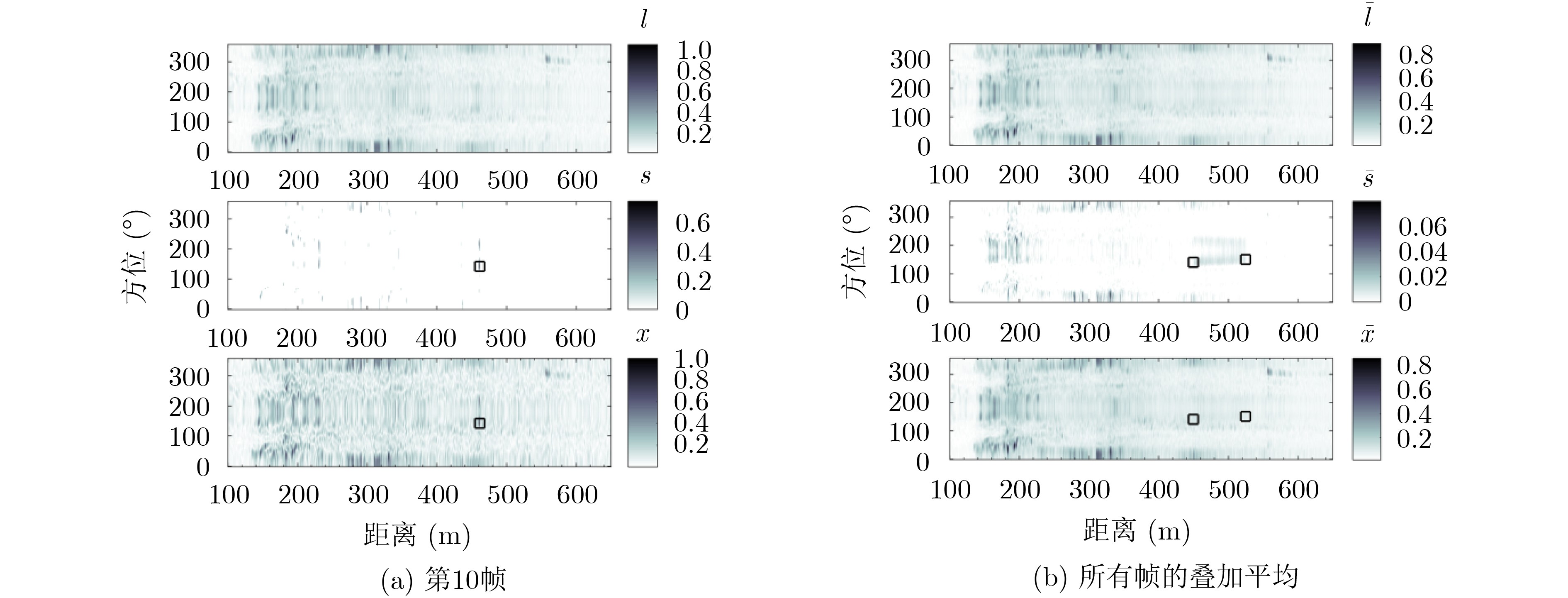
表 3 应用分离算法前后目标和混响强度对比(归一化单位)
方法 指标 帧10 帧11 帧12 帧13 帧14 帧15 帧16 原始 目标幅度 1.00 1.00 1.00 1.00 1.00 1.00 1.00 混响平均幅度 0.11 0.10 0.11 0.11 0.11 0.11 0.11 APG 目标幅度 0.54 0.54 0.55 0.53 0.38 0.46 0.54 混响平均幅度(×10–2) 0.11 0.12 0.12 0.12 0.11 0.11 0.11 FDPM 目标幅度 0.73 0.77 0.77 0.72 0.60 0.70 0.75 混响平均幅度(×10–2) 0.11 0.11 0.11 0.11 0.10 0.09 0.08
下载: 导出CSV
-
[1] GE Fengxiang, CHEN Ying, and LI Weichang. Target detecton and tracking via structured convex optimization[C]. Proceedings of 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, USA, 2017: 426–430. doi: 10.1109/ICASSP.2017.7952191. [2] ZOU Hui and XUE Lingzhou. A selective overview of sparse principal component analysis[J]. Proceedings of the IEEE, 2018, 106(8): 1311–1320. doi: 10.1109/JPROC.2018.2846588 [3] LI Haiyan, YIN Fan, and LI Chao. A high-accuracy target tracking method and its application in acoustic engineering[C]. Proceedings of the IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 2019: 690–694. doi: 10.1109/SIPROCESS.2019.8868499. [4] BOUWMANS T, JAVED S, ZHANG Hongyang, et al. On the applications of robust PCA in image and video processing[J]. Proceedings of the IEEE, 2018, 106(8): 1427–1457. doi: 10.1109/JPROC.2018.2853589 [5] VAN LUONG H, DELIGIANNIS N, SEILER J, et al. Compressive online robust principal component analysis via n-ℓ1 minimization[J]. IEEE Transactions on Image Processing, 2018, 27(9): 4314–4329. doi: 10.1109/TIP.2018.2831915 [6] 杨依忠, 汪鹏飞, 胡雄楼, 等. 基于鲁棒主成分分析的运动目标检测优化算法[J]. 电子与信息学报, 2018, 40(6): 1309–1315. doi: 10.11999/JEIT170789YANG Yizhong, WANG Pengfei, HU Xionglou, et al. Moving object detection optimization algorithm based on robust principal component analysis[J]. Journal of Electronics &Information Technology, 2018, 40(6): 1309–1315. doi: 10.11999/JEIT170789 [7] ZHENG Zhi, HUANG Yixiao, WANG Wenqin, et al. Spatial smoothing PAST algorithm for DOA tracking using difference coarray[J]. IEEE Signal Processing Letters, 2019, 26(11): 1623–1627. doi: 10.1109/LSP.2019.2942146 [8] WU Qiang, ZHENG Jiansheng, DONG Zhicheng, et al. An improved adaptive subspace tracking algorithm based on approximated power iteration[J]. IEEE Access, 2018, 6: 43136–43145. doi: 10.1109/ACCESS.2018.2863557 [9] DOUKOPOULOS X G and MOUSTAKIDES G V. Fast and stable subspace tracking[J]. IEEE Transactions on Signal Processing, 2008, 56(4): 1452–1465. doi: 10.1109/tsp.2007.909335 [10] HSU D, KAKADE S M, and ZHANG Tong. Robust matrix decomposition with sparse corruptions[J]. IEEE Transactions on Information Theory, 2011, 57(11): 7221–7234. doi: 10.1109/TIT.2011.2158250 [11] HE Jun, BALZANO L, and LUI J C S. Online robust subspace tracking from partial information[EB/OL]. https://arxiv.org/pdf/1109.3827v2.pdf, 2011. [12] TOH K C and YUN S. An accelerated proximal gradient algorithm for nuclear norm regularized least squares problems[J]. Pacific Journal of Optimization, 2010, 6(3): 615–640. [13] LIN Zhouchen, CHEN Minming, and MA Yi. The augmented lagrange multiplier method for exact recovery of corrupted low-rank matrices[EB/OL]. https://arxiv.org/pdf/1009.5055v3.pdf, 2010. [14] BECK A and TEBOULLE M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems[J]. SIAM Journal on Imaging Sciences, 2009, 2(1): 183–202. doi: 10.1137/080716542 [15] LIN Zhouchen, ARVIND G, JOHN W, et al. Fast convex optimization algorithms for exact recovery of a corrupted low-rank matrix[R]. Coordinated Science Laboratory Report no. UILU-ENG-09-2214, DC-246, 2009. doi: 10.1017/S0025315400020749. [16] LI Weichang, SUBRAHMANYA N, and XU Feng. Online subspace and sparse filtering for target tracking in reverberant environment[C]. Proceedings of the IEEE 7th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hoboken, USA, 2012: 329–332. doi: 10.1109/SAM.2012.6250502. -




图(3) / 表(3)
计量
- 文章访问数: 1369
- HTML全文浏览量: 635
- PDF下载量: 78
- 被引次数: 0
 下载:
下载:
