

Prediction of Drug Synergy and Antagonism Based on Drug-Drug Interaction Network
-
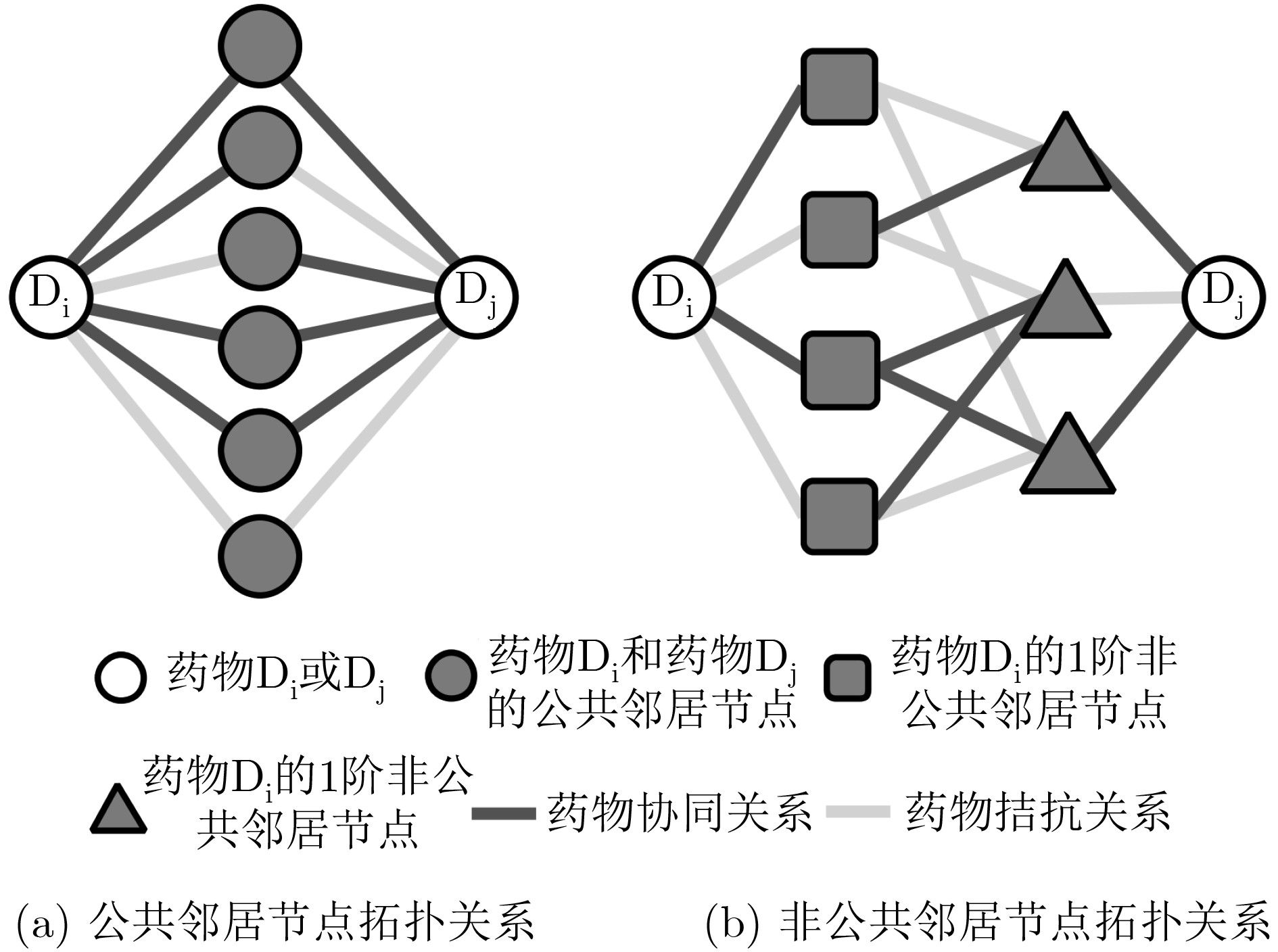
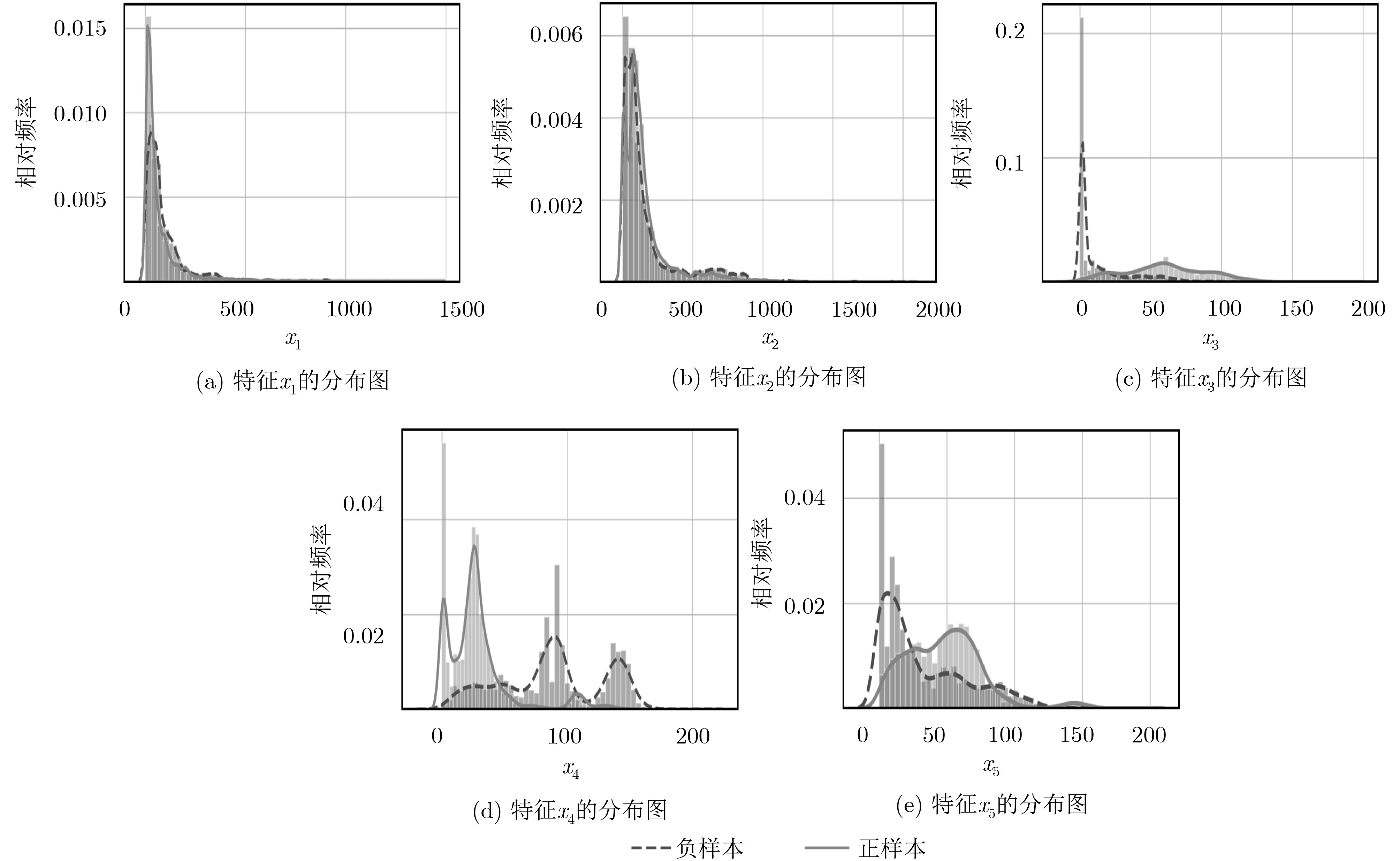
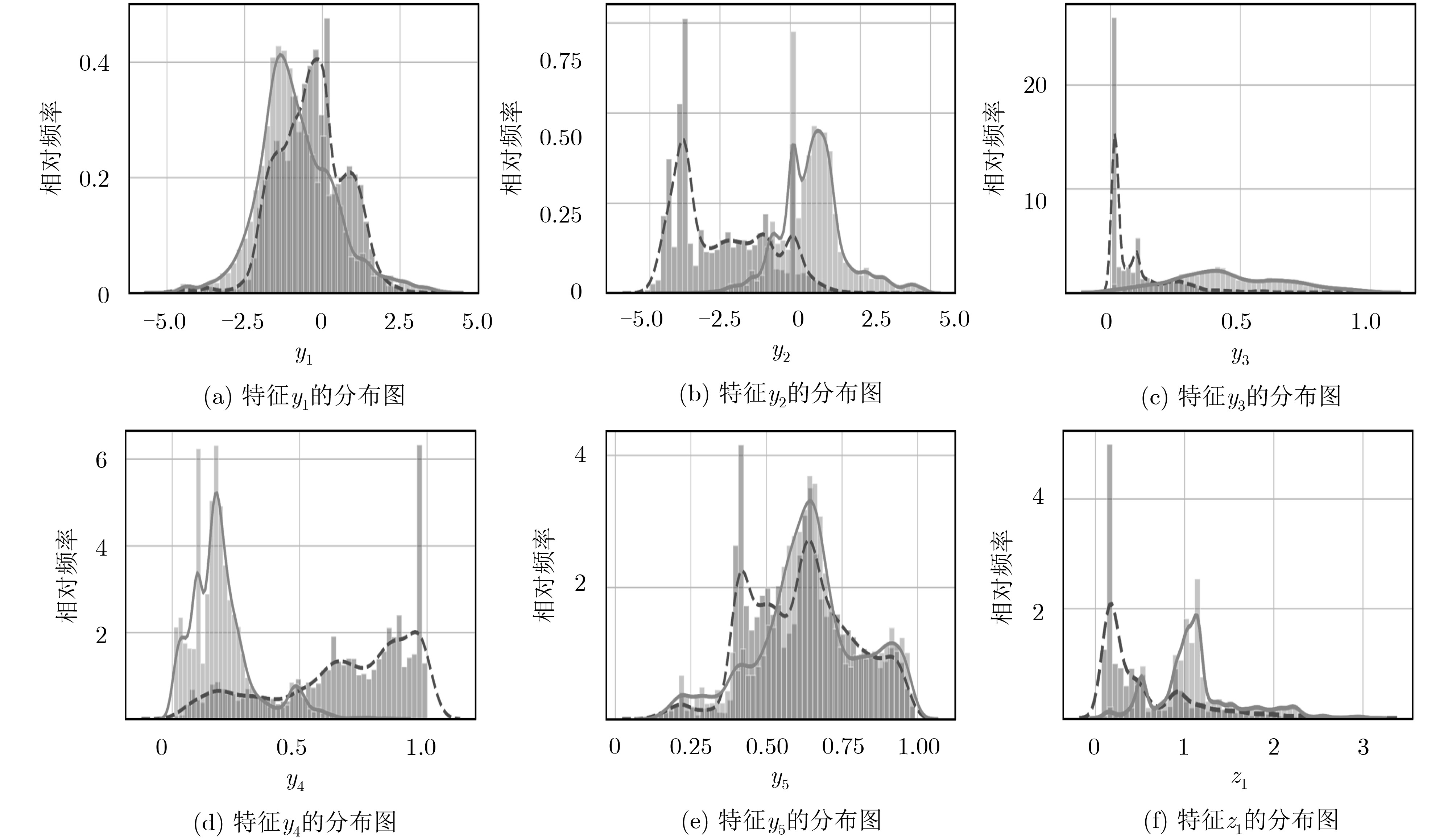
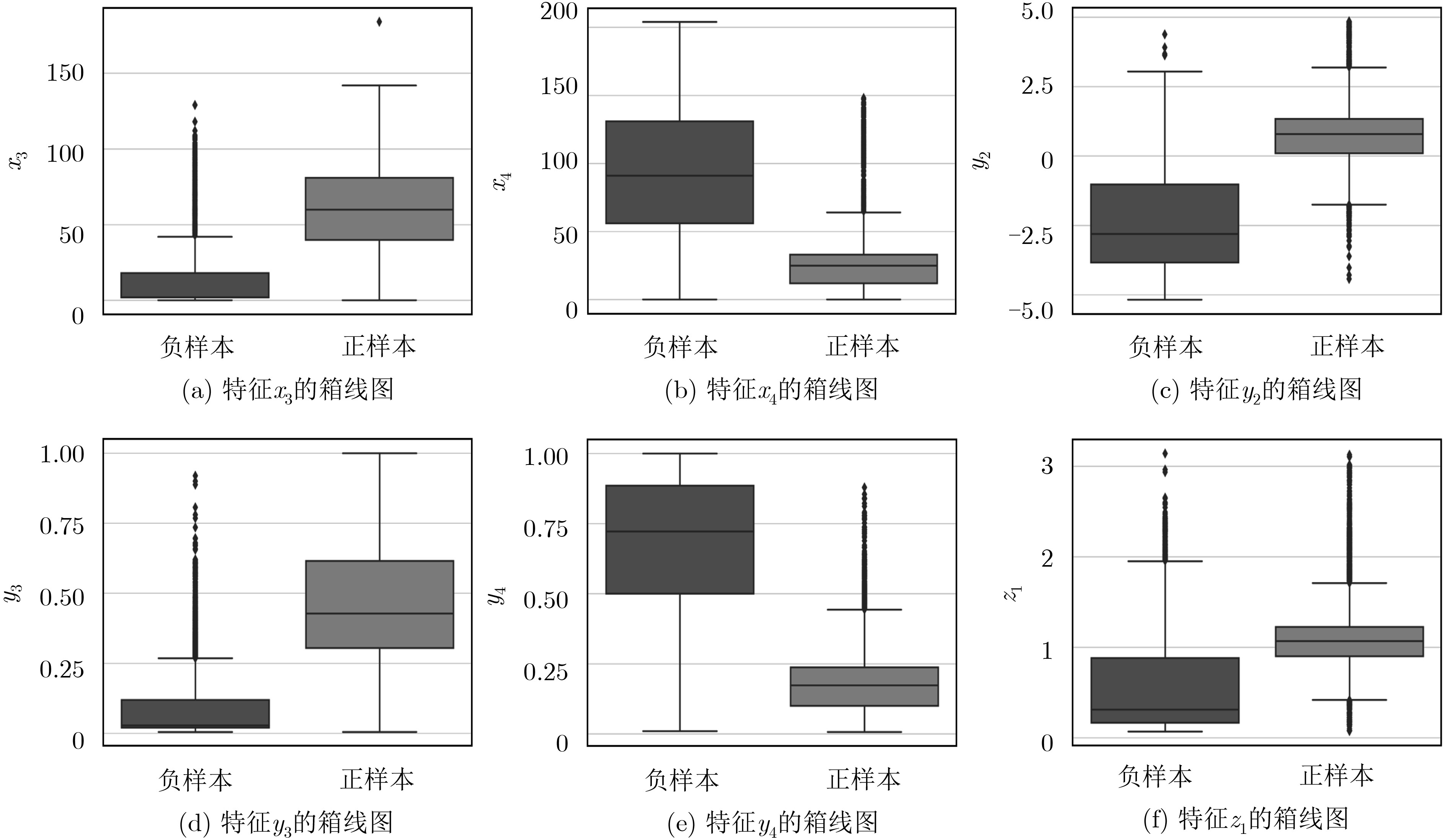
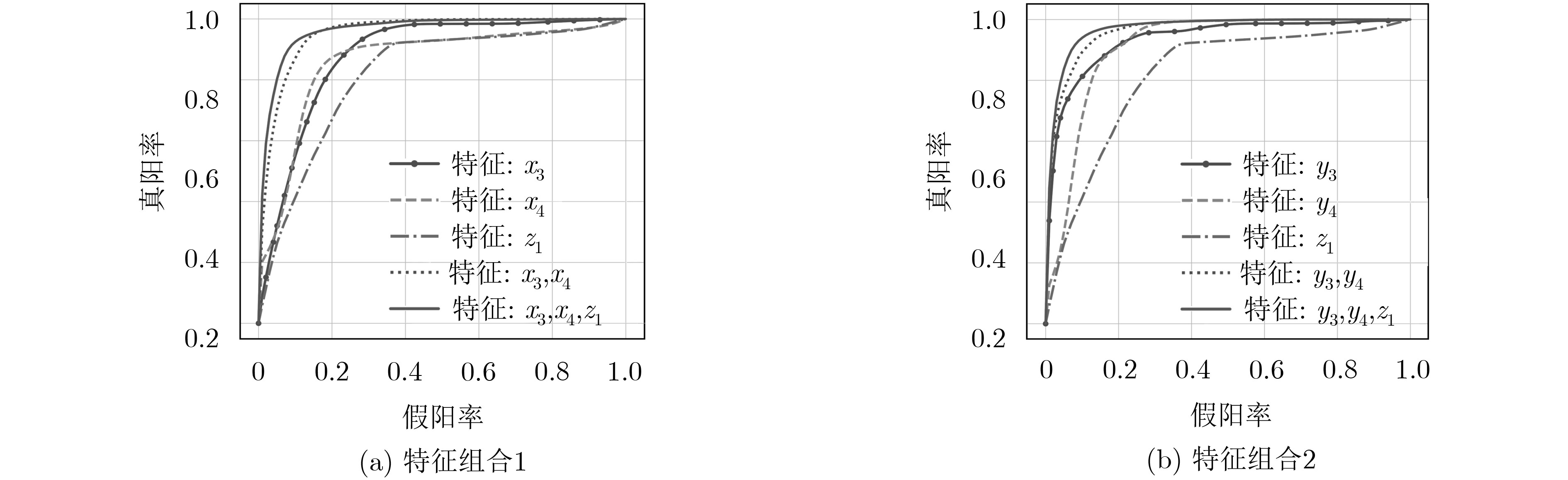
摘要: 药物的协同与拮抗关系预测,有助于药物的使用安全及组合用药的发展。该文从药物互作网络(DDINet)出发,基于网络拓扑结构构造分类特征,提出一种预测药物协同和拮抗关系的方法。从特征选择结果可知,根据药物与其公共邻居节点关系构造的特征表现出了明显的正负样本分布差距,能有效地反映出药物的协同或拮抗关系。在使用不同特征分类器的分类结果中,最优AUC和分类精度值分别达到了0.9687和0.9187。而在协同与拮抗关系预测结果中,其预测精度值达到了0.45和0.75以上。这说明基于网络拓扑结构的方法能有效对药物协同和拮抗关系进行分类和预测。与传统基于药物功能、结构、靶基因等相似性特征的方法相比,该方法计算简单高效,将会有效促进组合用药的发展。Abstract: Accurately predicting the synergistic and antagonistic relationship of drugs is helpful to the safety of drug use and the development of drug combination. A method for predicting drug synergy and antagonistic is proposed, which based on the Drug-Drug Interaction Network (DDINet) and its topological structure. From the result of feature selection, it can be seen that the feature constructed based on the interaction between the drug and its common neighbor node shows an obvious difference in the distribution of positive and negative samples, which can effectively reflect the drug synergy or antagonism. In the classification results using different feature classifiers, the optimal Area Under the Curve (AUC) and classification accuracy value reache 0.9687 and 0.9187 respectively. In the prediction results of synergy and antagonism, the prediction accuracy also reache above 0.45 and 0.75. This shows that the method based on network topology can effectively classify and predict the synergistic and antagonistic effects of drugs. Compared with the traditional methods based on similarity features of drug function, structure, target gene, etc, this method is simple and efficient to calculate, and can effectively promote the development of combination drugs.
-
Key words:
- Prediction Drug-Drug Interactions(DDIs) /
- Network topology /
- Synergy /
- Antagonism
-
VAN ROON E N, FLIKWEERT S, LE COMTE M, et al. Clinical relevance of drug-drug interactions[J]. Drug Safety, 2005, 28(12): 1131–1139. doi: 10.2165/00002018-200528120-00007 CHOU Tingchao. Theoretical basis, experimental design, and computerized simulation of synergism and antagonism in drug combination studies[J]. Pharmacological Reviews, 2006, 58(3): 621–681. doi: 10.1124/pr.58.3.10 LEHÁR J, KRUEGER A S, AVERY W, et al. Synergistic drug combinations tend to improve therapeutically relevant selectivity[J]. Nature Biotechnology, 2009, 27(7): 659–666. doi: 10.1038/nbt.1549 CHAIT R, CRANEY A, and KISHONY R. Antibiotic interactions that select against resistance[J]. Nature, 2007, 446(7136): 668–671. doi: 10.1038/nature05685 VENKATAKRISHNAN K, VON MOLTKE L L, OBACH R S, et al. Drug metabolism and drug interactions: Application and clinical value of in vitro models[J]. Current Drug Metabolism, 2003, 4(5): 423–459. doi: 10.2174/1389200033489361 PIRMOHAMED M and ORME M L. Drug Interactions of Clinical Importance[M]. DAVIES D M, FERNER R E, and DE GLANVILLE H. Davies's Textbook of Adverse Drug Reactions. 5th ed. London: Chapman & Hall, 1998: 888–912. TAKEDA T, HAO Ming, CHENG Tiejun, et al. Predicting drug-drug interactions through drug structural similarities and interaction networks incorporating pharmacokinetics and pharmacodynamics knowledge[J]. Journal of Cheminformatics, 2017, 9: 16. doi: 10.1186/s13321-017-0200-8 FOKOUE A, SADOGHI M, HASSANZADEH O, et al. Predicting drug-drug interactions through large-scale similarity-based link prediction[C]. The 13th International Conference European Semantic Web Conference, Heraklion, Greece, 2016: 774–789. doi: 10.1007/978-3-319-34129-3_47. VILAR S, HARPAZ R, URIARTE E, et al. Drug—drug interaction through molecular structure similarity analysis[J]. Journal of the American Medical Informatics Association, 2012, 19(6): 1066–1074. doi: 10.1136/amiajnl-2012-000935 VILAR S, URIARTE E, SANTANA L, et al. Detection of drug-drug interactions by modeling interaction profile fingerprints[J]. PLoS One, 2013, 8(3): e58321. doi: 10.1371/journal.pone.0058321 KASTRIN A, FERK P, and LESKOŠEK B. Predicting potential drug-drug interactions on topological and semantic similarity features using statistical learning[J]. PLoS One, 2018, 13(5): e0196865. doi: 10.1371/journal.pone.0196865 CHENG Feixiong and ZHAO Zhongming. Machine learning-based prediction of drug-drug interactions by integrating drug phenotypic, therapeutic, chemical, and genomic properties[J]. Journal of the American Medical Informatics Association, 2014, 21(e2): e278–e286. doi: 10.1136/amiajnl-2013-002512 RYU J Y, KIM H U, and LEE S Y. Deep learning improves prediction of drug-drug and drug-food interactions[J]. Proceedings of the National Academy of Sciences of the United States of America, 2018, 115(18): E4304–E4311. doi: 10.1073/pnas.1803294115 LUO Heng, ZHANG Ping, HUANG Hui, et al. DDI-CPI, a server that predicts drug-drug interactions through implementing the chemical-protein interactome[J]. Nucleic Acids Research, 2014, 42(W1): W46–W52. doi: 10.1093/nar/gku433 ZHANG Ping, WANG Fei, HU Jianying, et al. Label propagation prediction of drug-drug interactions based on clinical side effects[J]. Scientific Reports, 2015, 5: 12339. doi: 10.1038/srep12339 LIU Lili, CHEN Lei, ZHANG Yuhang, et al. Analysis and prediction of drug-drug interaction by minimum redundancy maximum relevance and incremental feature selection[J]. Journal of Biomolecular Structure and Dynamics, 2017, 35(2): 312–329. doi: 10.1080/07391102.2016.1138142 TAKARABE M, SHIGEMIZU D, KOTERA M, et al. Network-based analysis and characterization of adverse drug-drug interactions[J]. Journal of Chemical Information and Modeling, 2011, 51(11): 2977–2985. doi: 10.1021/ci200367w GOTTLIEB A, STEIN G Y, ORON Y, et al. INDI: A computational framework for inferring drug interactions and their associated recommendations[J]. Molecular Systems Biology, 2012, 8: 592. doi: 10.1038/msb.2012.26 WISHART D S, FEUNANG Y D, GUO A C, et al. DrugBank 5.0: A major update to the DrugBank database for 2018[J]. Nucleic Acids Research, 2017, 46(D1): D1074–D1082. doi: 10.1093/nar/gkx1037 CORTES C and VAPNIK V. Support-vector networks[J]. Machine Learning, 1995, 20(3): 273–297. doi: 10.1007/bf00994018 陈素根, 吴小俊. 基于特征值分解的中心支持向量机算法[J]. 电子与信息学报, 2016, 38(3): 557–564. doi: 10.11999/JEIT150693CHEN Sugen and WU Xiaojun. Eigenvalue proximal support vector machine algorithm based on eigenvalue decoposition[J]. Journal of Electronics &Information Technology, 2016, 38(3): 557–564. doi: 10.11999/JEIT150693 汪廷华, 田盛丰, 黄厚宽. 特征加权支持向量机[J]. 电子与信息学报, 2009, 31(3): 514–518. doi: 10.3724/SP.J.1146.2007.01711WANG Tinghua, TIAN Shengfeng, and HUANG Houkuan. Feature weighted support vector machine[J]. Journal of Electronics &Information Technology, 2009, 31(3): 514–518. doi: 10.3724/SP.J.1146.2007.01711 WU Shaomin and FLACH P. A scored AUC metric for classifier evaluation and selection[C]. ICML 2005 Workshop on ROC Analysis in Machine Learning, Bonn, Germany, 2005. HOSSIN M and SULAIMAN M N. A review on evaluation metrics for data classification evaluations[J]. International Journal of Data Mining & Knowledge Management Process, 2015, 5(2): 1–11. doi: 10.5121/ijdkp.2015.5201 ARLOT S and CELISSE A. A survey of cross-validation procedures for model selection[J]. Statistics Surveys, 2010, 4: 40–79. doi: 10.1214/09-SS054 LIU Weiping and LÜ Linyuan. Link prediction based on local random walk[J]. EPL (Europhysics Letters) , 2010, 89(5): 58007. doi: 10.1209/0295-5075/89/58007 TANG Jiliang, ALELYANI S, and LIU Huan. Feature Selection for Classification: A Review[M]. AGGARWAL C C. Data Classification: Algorithms and Applications. New York: CRC Press, 2014: 37. -

 下载:
下载:



图(7)
计量
- 文章访问数: 3041
- HTML全文浏览量: 1940
- PDF下载量: 116
- 被引次数: 0
