

The Key Technology and Development of Intelligent and Connected Transportation System
-
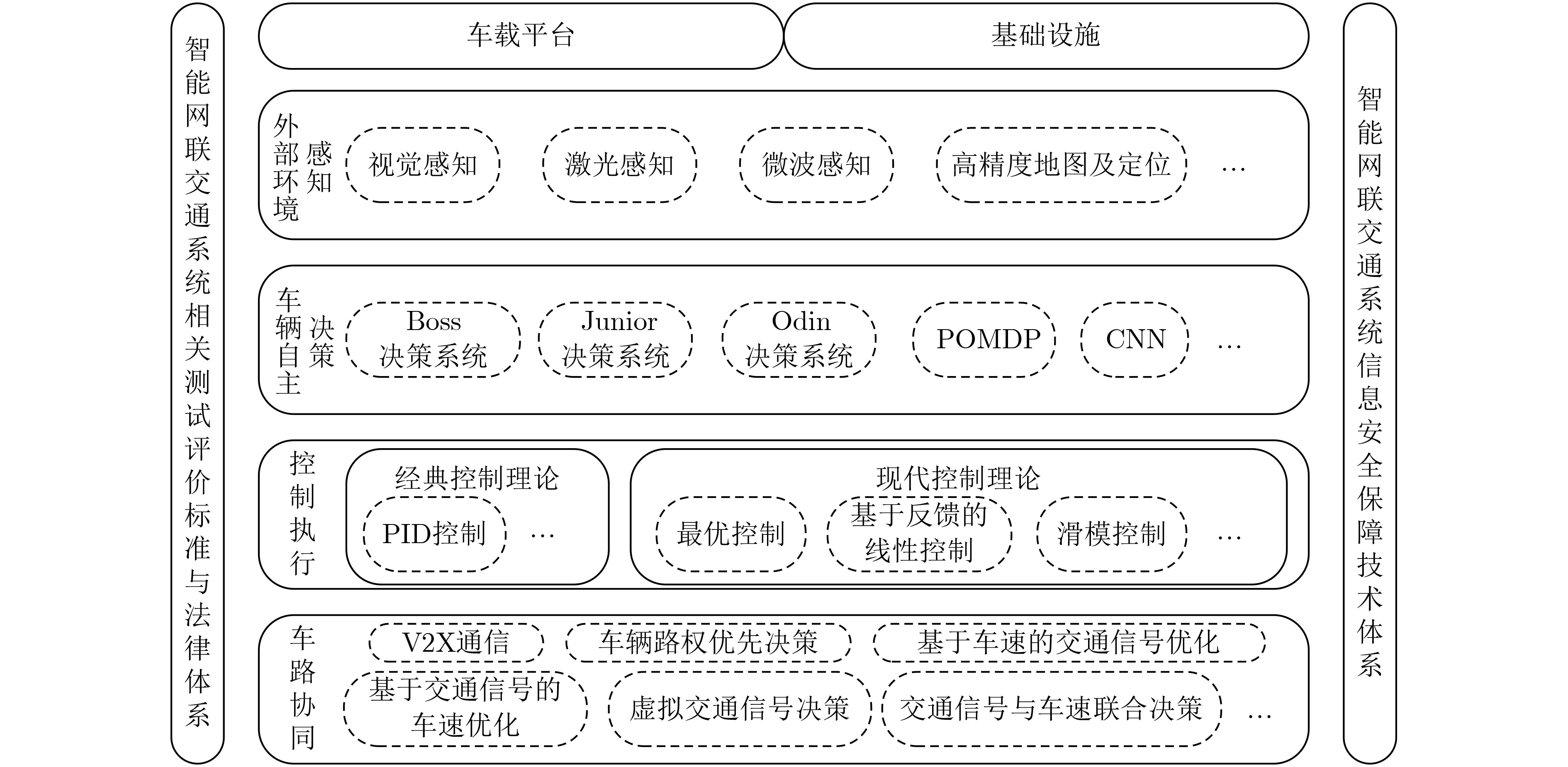
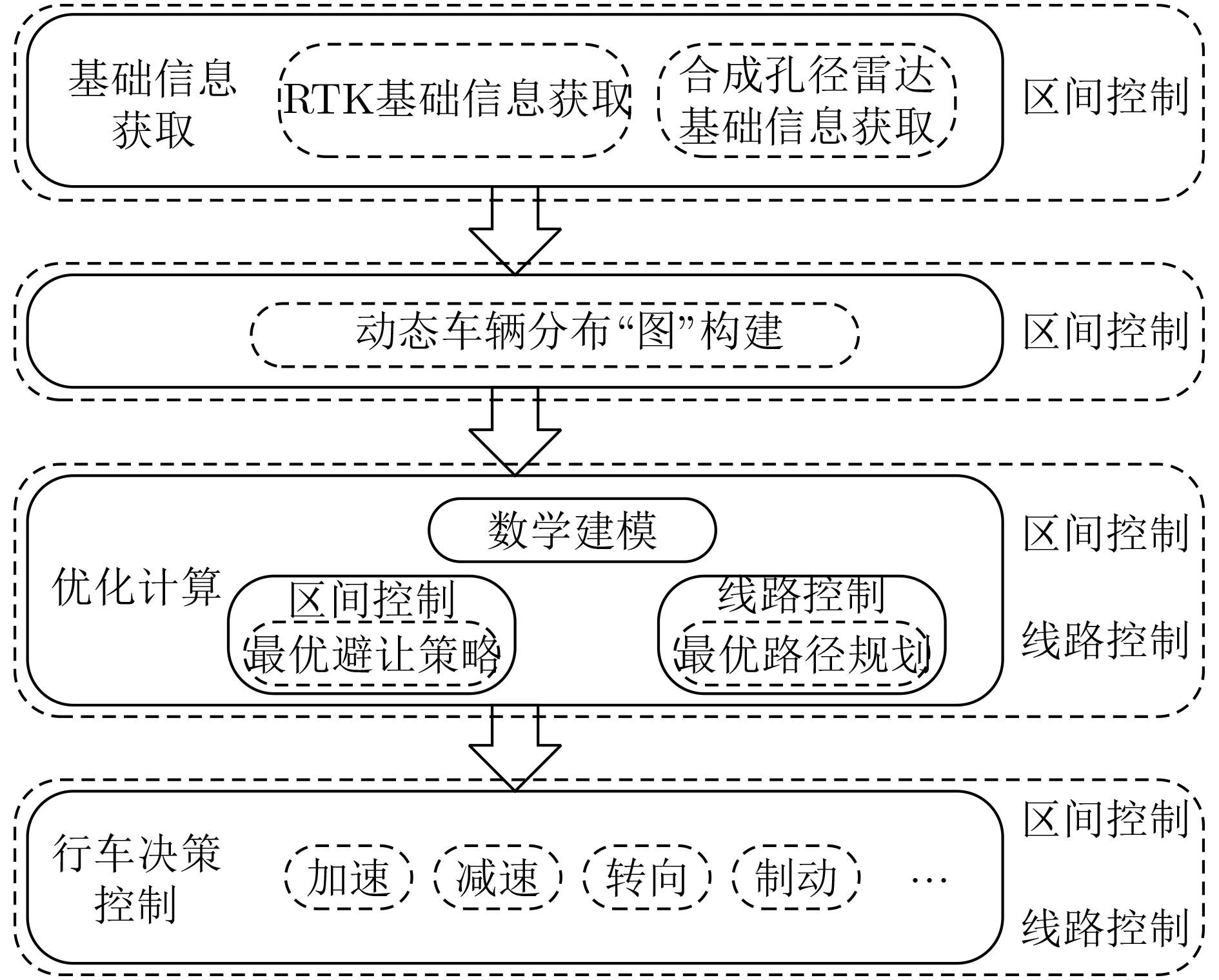
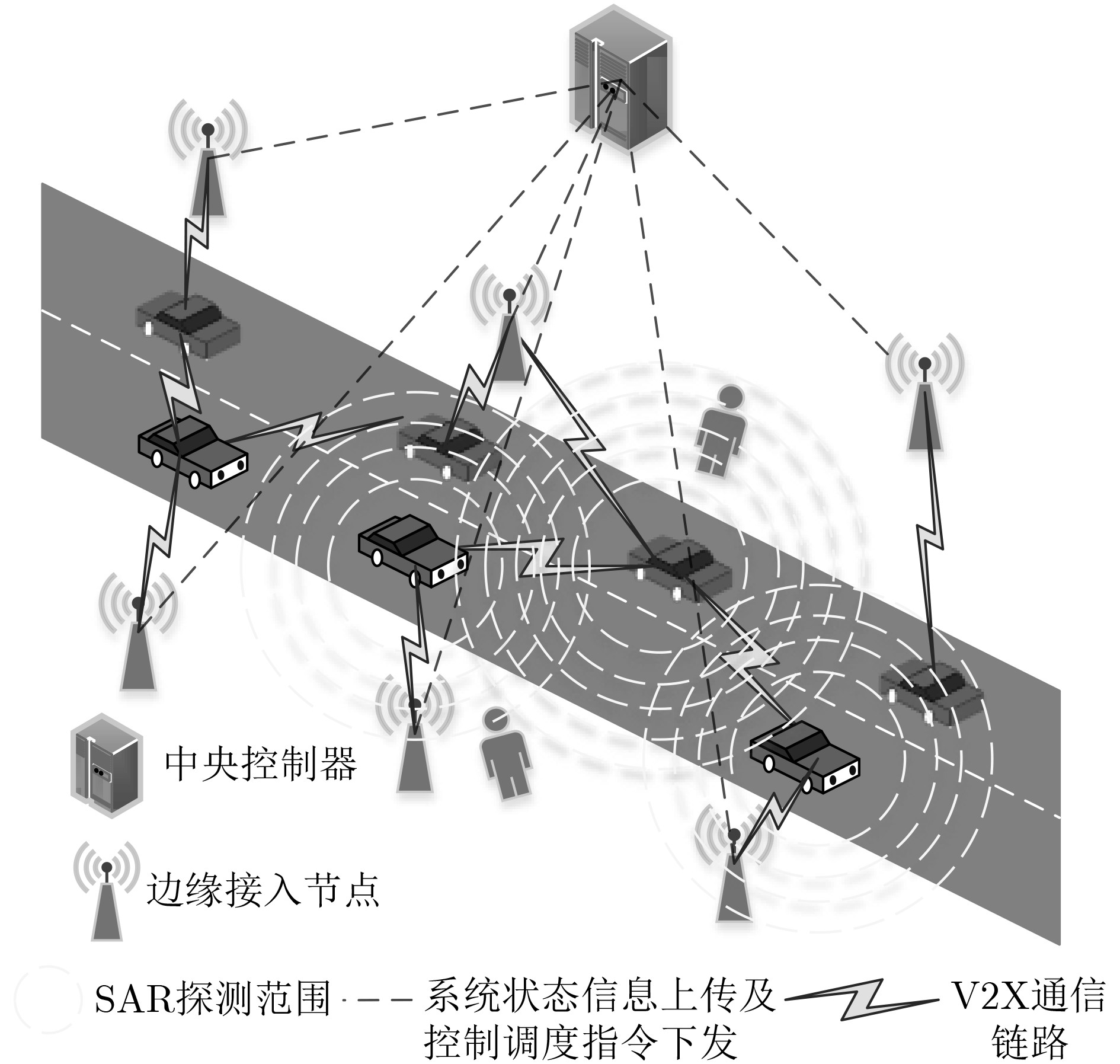
摘要: 该文梳理了国内外针对智能网联交通系统的相关研究,阐述了智能网联交通系统的架构和关键技术,分析了外部环境感知技术、车辆自主决策技术、控制执行技术以及车路协同技术等几个重点方向的研究进展。在分析总结已有文献的基础上,该文描述了未来智能网联交通系统的方案及其工作原理。未来智能网联交通系统应具备全程路径规划和精准定位功能,运用实时动态定位(RTK)技术和合成孔径雷达(SAR)技术,对运动或非运动物体(包括未装载GPS的物体)进行探测和定位,并保证在GPS信号弱或无信号(如隧道、室内)环境下和近距离、非可视情况下探测信号的连续性。系统还将运用移动边缘计算(MEC)理论,解决低时延、大规模网络接入等关键问题,运用大数据、云计算、物联网(IoTs)和移动通信技术,实现具有全局性、网络化的智能网联交通系统。Abstract: Some current works on intelligent and connected transportation system are presented, particularly focusing on the state of the art of the framework and key technologies in China or internationally, and the research development in some critical directions are elaborated including external environment perception, autonomous decision of vehicles, control execution and cooperative vehicle infrastructure system. On the basis of analyzing and summarizing the existing literature, the scheme of the future intelligent and connected transportation system and its working principle are described. The future intelligent and connected transportation system have the function of full path planning and precise, and the Real-Time Kinematic (RTK) and Synthetic Aperture Radar (SAR) technologies are used to detect and locate moving or non-moving objects, including those without GPS. And the continuity of the detection signal can be guaranteed in the environment where GPS signals are weak or non-signaled (e.g., tunnel, indoor) and the situation of close-range and non-visual. The Mobile Edge Computing (MEC) theory can also be used in the system to solve the key problems such as low latency and large-scale network access, and the big data, cloud computing, Internet of Things (IoTs) and mobile communication technologies are used to realize the global and networked intelligent and connected transportation system.
-
表 1 3种不同感知技术对比
感知技术 优点 缺点 感知范围 视觉感知 实时性好,能耗较低,获取的信息量丰富 感知结果易受外界环境影响,3维物体
识别精度较低最远可实现250 m范围内物体的感知 激光感知 可精准识别3维物体距离信息,感知结果
不易受外界环境影响体积大,价格昂贵,无法完成无距离
差异平面内物体感知可完成300 m范围内直径1 cm物体的感知 微波感知 可精准识别3维物体距离信息,感知结果
不易受外界环境影响无法完成无距离差异平面内物体感知 取决于传感器的波长,一般可完成8~
10 m内物体的感知 下载: 导出CSV
下载: 导出CSV
表 2 不同控制执行技术的对比
控制执行技术 优点 缺点 横向
控制经典控制理论 PID 结构简单,可操作性好 线性模型,在多变量以及时变控制系统中
具有局限性现代控制理论 最优控制 可使系统性能达到最优 对数学模型的依赖性较高 滑模控制 非线性模型,系统鲁棒性好,响应速度较快 控制结果受外界不确定性影响较大 自适应控制 对外部环境变化具有较强的鲁棒性 方法实时性相对较差 模糊控制 无需借助精确的数学模型,对外部环境变化
具有较强的鲁棒性需借助研究人员的经验设置模糊规则 纵向
控制直接式结构控制 系统集成度高 过于依赖系统状态信息,模型非线性度较高 分层式结构控制 结构简单,易于实现,开发难度较低 忽略了参数不确定性以模型误差的影响,
建模准确性相对较低
下载: 导出CSV
-
钱志鸿, 王义君. 面向物联网的无线传感器网络综述[J]. 电子与信息学报, 2013, 35(1): 215–227. doi: 1009-5896(2013)01-0215-13QIAN Zhihong and WANG Yijun. Internet of things-oriented wireless sensor networks review[J]. Journal of Electronics &Information Technology, 2013, 35(1): 215–227. doi: 1009-5896(2013)01-0215-13 钱志鸿, 王义君. 物联网技术与应用研究[J]. 电子学报, 2012, 40(5): 1023–1029. doi: 0372-2112(2012)-05-1023-07QIAN Zhihong and WANG Yijun. IoT technology and application[J]. Acta Electronica Sinica, 2012, 40(5): 1023–1029. doi: 0372-2112(2012)-05-1023-07 QIU Tie, CHEN Ning, LI Keqiu, et al. How can heterogeneous internet of things build our future: A survey[J]. IEEE Communications Surveys & Tutorials, 2018, 20(3): 2011–2027. doi: 10.1109/COMST.2018.2803740 KAIWARTYA O, ABDULLAH A H, CAO Yue, et al. Internet of vehicles: Motivation, layered architecture, network model, challenges, and future aspects[J]. IEEE Access, 2016, 4: 5356–5373. doi: 10.1109/ACCESS.2016.2603219 ZHENG Kan, ZHENG Qiang, CHATZIMISIOS P, et al. Heterogeneous vehicular networking: A survey on architecture, challenges, and solutions[J]. IEEE Communications Surveys & Tutorials, 2015, 17(4): 2377–2396. doi: 10.1109/COMST.2015.2440103 KU I, LU You, GERLA M, et al. Towards software-defined VANET: Architecture and services[C]. The 13th Annual Mediterranean Ad Hoc Networking Workshop, Piran, Slovenia, 2014: 103–110. doi: 10.1109/MedHocNet.2014.6849111. ZHENG Kan, HOU Lu, MENG Hanlin, et al. Soft-defined heterogeneous vehicular network: Architecture and challenges[J]. IEEE Network, 2016, 30(4): 72–80. doi: 10.1109/MNET.2016.7513867 DOS REIS FONTES R, CAMPOLO C, ROTHENBERG C, et al. From theory to experimental evaluation: Resource management in software-defined vehicular networks[J]. IEEE Access, 2017, 5: 3069–3076. doi: 10.1109/ACCESS.2017.2671030 CAMPOLO C, MOLINARO A, IERA A, et al. 5G network slicing for vehicle-to-everything services[J]. IEEE Wireless Communications, 2017, 24(6): 38–45. doi: 10.1109/MWC.2017.1600408 HE Jianhua, TANG Zuoyin, FAN Zhong, et al. Enhanced collision avoidance for distributed LTE vehicle to vehicle broadcast communications[J]. IEEE Communications Letters, 2018, 22(3): 630–633. doi: 10.1109/LCOMM.2018.2791399 SHI Weisen, ZHOU Haibo, LI Junling, et al. Drone assisted vehicular networks: Architecture, challenges and opportunities[J]. IEEE Network, 2018, 32(3): 130–137. doi: 10.1109/MNET.2017.1700206 SU Zhou, HUI Yilong, and YANG Qing. The next generation vehicular networks: A content-centric framework[J]. IEEE Wireless Communications, 2017, 24(1): 60–66. doi: 10.1109/MWC.2017.1600195WC BITAM S, MELLOUK A, and ZEADALLY S. VANET-cloud: A generic cloud computing model for vehicular ad hoc networks[J]. IEEE Wireless Communications, 2015, 22(1): 96–102. doi: 10.1109/MWC.2015.7054724 LI Wenjia and SONG Houbing. ART: An attack-resistant trust management scheme for securing vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(4): 960–969. doi: 10.1109/TITS.2015.2494017 MAHMUD K, TOWN G E, MORSALIN S, et al. Integration of electric vehicles and management in the internet of energy[J]. Renewable and Sustainable Energy Reviews, 2018, 82: 4179–4203. doi: 10.1016/j.rser.2017.11.004 YANG Helin, XIE Xianzhong, and KADOCH M. Intelligent resource management based on reinforcement learning for ultra-reliable and low-latency IoV communication networks[J]. IEEE Transactions on Vehicular Technology, 2019, 68(5): 4157–4169. doi: 10.1109/TVT.2018.2890686 ZHENG Qiang, ZHENG Kan, CHATZIMISIOS P, et al. A novel link allocation method for vehicle-to-vehicle-based relaying networks[J]. Transactions on Emerging Telecommunications Technologies, 2016, 27(1): 64–73. doi: 10.1002/ett.2790 ZHENG Qiang, ZHENG Kan, ZHANG Haijun, et al. Delay-optimal virtualized radio resource scheduling in software-defined vehicular networks via stochastic learning[J]. IEEE Transactions on Vehicular Technology, 2016, 65(10): 7857–7867. doi: 10.1109/TVT.2016.2538461 YU Zhuyue, XIE Jiayou, TANG Yuliang, et al. SMDP based cross-area resource management for vehicular cloud networks[C]. The 89th IEEE Vehicular Technology Conference, Kuala Lumpur, Malaysia, 2019: 1–5. doi: 10.1109/VTCSpring.2019.8746421. ZHANG Weishan, DUAN Pengcheng, GONG Wenjuan, et al. A load-aware pluggable cloud framework for real-time video processing[J]. IEEE Transactions on Industrial Informatics, 2016, 12(6): 2166–2176. doi: 10.1109/TII.2016.2560802 WU Yuan, NI Kejie, ZHANG Cheng, et al. NOMA-assisted multi-access mobile edge computing: A joint optimization of computation offloading and time allocation[J]. IEEE Transactions on Vehicular Technology, 2018, 67(12): 12244–12258. doi: 10.1109/TVT.2018.2875337 LIN Chuncheng, DENG D, and YAO C C. Resource allocation in vehicular cloud computing systems with heterogeneous vehicles and roadside units[J]. IEEE Internet of Things Journal, 2018, 5(5): 3692–3700. doi: 10.1109/JIOT.2017.2690961 HE Ying, ZHAO Nan, and YIN Hongxi. Integrated networking, caching, and computing for connected vehicles: A deep reinforcement learning approach[J]. IEEE Transactions on Vehicular Technology, 2018, 67(1): 44–55. doi: 10.1109/TVT.2017.2760281 ABANI N, BRAUN T, and GERLA M. Proactive caching with mobility prediction under uncertainty in information-centric networks[C]. The 4th ACM Conference on Information-Centric Networking, Berlin, Germany, 2017: 88–97. doi: 10.1145/3125719.3125728. GREWE D, WAGNER M, and FREY H. PeRCeIVE: Proactive caching in ICN-based VANETs[C]. The 2016 IEEE Vehicular Networking Conference, Columbus, USA, 2016: 1–8. doi: 10.1109/VNC.2016.7835962. 范茜莹, 黄传河, 朱钧宇, 等. 无人机辅助车联网环境下干扰感知的节点接入机制[J]. 通信学报, 2019, 40(6): 90–101. doi: 10.11959/j.issn.1000-436x.2019081FAN Xiying, HUANG Chuanhe, ZHU Junyu, et al. Interference-aware node access scheme in UAV-aided VANET[J]. Journal on Communications, 2019, 40(6): 90–101. doi: 10.11959/j.issn.1000-436x.2019081 GE Xiaohu, CHENG Hui, MAO Guoqiang, et al. Vehicular communications for 5G cooperative small-cell networks[J]. IEEE Transactions on Vehicular Technology, 2016, 65(10): 7882–7894. doi: 10.1109/TVT.2016.2539285 吴黎兵, 刘冰艺, 聂雷, 等. VANET-Cellular环境下安全消息广播中继选择方法研究[J]. 计算机学报, 2017, 40(4): 1004–1016. doi: 10.11897/SP.J.1016.2017.01004WU Libing, LIU Bingyi, NIE Lei, et al. Research on selection of safety message broadcast relay in VANET-Cellular[J]. Chinese Journal of Computers, 2017, 40(4): 1004–1016. doi: 10.11897/SP.J.1016.2017.01004 REZGUI J and CHERKAOUI S. An M2M access management scheme for electrical vehicles[C]. The 2017 IEEE Global Communications Conference, Singapore, 2017: 1–6. doi: 10.1109/GLOCOM.2017.8253977. CHOI J H, HAN Y H, and MIN S. A network-based seamless handover scheme for VANETs[J]. IEEE Access, 2018, 6: 56311–56322. doi: 10.1109/ACCESS.2018.2872795 ZENG Yong, ZHANG Rui, and LIM T J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges[J]. IEEE Communications Magazine, 2016, 54(5): 36–42. doi: 10.1109/MCOM.2016.7470933 ZENG Yong and ZHANG Rui. Energy-efficient UAV communication with trajectory optimization[J]. IEEE Transactions on Wireless Communications, 2017, 16(6): 3747–3760. doi: 10.1109/TWC.2017.2688328 OUBBATI O S, LAKAS A, ZHOU Fen, et al. Intelligent UAV-assisted routing protocol for urban VANETs[J]. Computer Communications, 2017, 107: 93–111. doi: 10.1016/j.comcom.2017.04.001 XIAO Liang, LU Xiaozhen, XU Dongjin, et al. UAV relay in VANETs against smart jamming with reinforcement learning[J]. IEEE Transactions on Vehicular Technology, 2018, 67(5): 4087–4097. doi: 10.1109/TVT.2018.2789466 DIKMEN M and BURNS C M. Autonomous driving in the real world: Experiences with Tesla Autopilot and Summon[C]. The 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, USA, 2016: 225–228. doi: 10.1145/3003715.3005465. DIKMEN M and BURNS C. Trust in autonomous vehicles: The case of Tesla Autopilot and Summon[C]. The 2017 IEEE International Conference on Systems, Man, and Cybernetics, Banff, Canada, 2017: 1093–1098. doi: 10.1109/SMC.2017.8122757 GUANETTI J, KIM Y, and BORRELLI F. Control of connected and automated vehicles: State of the art and future challenges[J]. Annual Reviews in Control, 2018, 45: 18–40. doi: 10.1016/j.arcontrol.2018.04.011 ROSENBAND D L. Inside Waymo’s self-driving car: My favorite transistors[C]. 2017 Symposium on VLSI Circuits, Kyoto, Japan, 2017: C20–C22. doi: 10.23919/VLSIC.2017.8008500. LI Yan, CAO Yiqing, QIU Hong, et al. Big wave of the intelligent connected vehicles[J]. China Communications, 2016, 13(2): 27–41. doi: 10.1109/CC.2016.7405720 IMRAN A, ZOHA A, and ABU-DAYYA A. Challenges in 5G: How to empower SON with big data for enabling 5G[J]. IEEE Network, 2014, 28(6): 27–33. doi: 10.1109/MNET.2014.6963801 BENNIS M, DEBBAH M, and POOR H V. Ultrareliable and low-latency wireless communication: Tail, risk, and scale[J]. Proceedings of the IEEE, 2018, 106(10): 1834–1853. doi: 10.1109/JPROC.2018.2867029 BOTTE M, PARIOTA L, D’ACIERNO L, et al. An overview of cooperative driving in the European Union: Policies and practices[J]. Electronics, 2019, 8(6): 616. doi: 10.3390/electronics8060616 Telefónica and Huawei: Complete joint 5G-V2X PoC test in their 5G joint innovation lab at Madrid[EB/OL]. https://news.europawire.eu/telefonica-and-huawei-complete-joint-5g-v2x-poc-test-in-their-5g-joint-innovation-lab-at-madrid-53202031254/eu-press-release/2018/02/08/, 2018. 中国汽车工程学会. 节能与新能源汽车技术路线图[M]. 北京: 机械工业出版社, 2016.China-SAE. Technology Roadmap for Energy Saving and New Energy Vehicles[M]. Beijing: Mechanical Industry Press, 2016. YANG Diange, JIANG Kun, ZHAO Ding, et al. Intelligent and connected vehicles: Current status and future perspectives[J]. Science China Technological Sciences, 2018, 61(10): 1446–1471. doi: 10.1007/s11431-017-9338-1 WEI Shangguan, YU Du, GUO Chailin, et al. Survey of connected automated vehicle perception mode: From autonomy to interaction[J]. IET Intelligent Transport Systems, 2019, 13(3): 495–505. doi: 10.1049/iet-its.2018.5239 ROSIQUE F, NAVARRO P J, FERNÁNDEZ C, et al. A systematic review of perception system and simulators for autonomous vehicles research[J]. Sensors, 2019, 19(3): 648. doi: 10.3390/s19030648 TILAKARATNA S B D, WATCHAREERUETAI U, SISSHICHAI S, et al. Image analysis algorithms for vehicle color recognition[C]. 2017 International Electrical Engineering Congress, Pattaya, Thailand, 2017: 1–4. doi: 10.1109/IEECON.2017.8075881. KIM H, LIU Bingbing, and MYUNG H. Road-feature extraction using point cloud and 3D LiDAR sensor for vehicle localization[C]. The 14th International Conference on Ubiquitous Robots and Ambient Intelligence, Jeju, South Korea, 2017: 891–892. doi: 10.1109/URAI.2017.7992858. DUDÁS L, MICSKEI T, SELLER R, et al. Vehicle relative movement estimation using microwave sensor[C]. The 15th Conference on Microwave Techniques COMITE 2010, Brno, Czech Republic, 2010: 109–112. doi: 10.1109/COMITE.2010.5481862. CHOI E and CHANG S. An adaptive tracking estimator for robust vehicular localization in shadowing areas[J]. IEEE Access, 2019, 7: 42436–42444. doi: 10.1109/ACCESS.2019.2907647 《中国公路学报》编辑部. 中国汽车工程学术研究综述•2017[J]. 中国公路学报, 2017, 30(6): 1–197.Editorial Department of China Journal of Highway and Transport. Review on China’s automotive engineering research progress: 2017[J]. China Journal of Highway and Transport, 2017, 30(6): 1–197. SCHITO J and FABRIKANT S I. Exploring maps by sounds: Using parameter mapping sonification to make digital elevation models audible[J]. International Journal of Geographical Information Science, 2018, 32(5): 874–906. doi: 10.1080/13658816.2017.1420192 CHEN Maolin, ZHAN Xingqun, ZHANG Xin, et al. Localisation-based autonomous vehicle rear-end collision avoidance by emergency steering[J]. IET Intelligent Transport Systems, 2019, 13(7): 1078–1087. doi: 10.1049/iet-its.2018.5348 LIU Dongxu, DONG Hongzhao, LI Tiebei, et al. Vehicle scheduling approach and its practice to optimise public bicycle redistribution in Hangzhou[J]. IET Intelligent Transport Systems, 2018, 12(8): 976–985. doi: 10.1049/iet-its.2017.0274 WANG Hai, YU Yijie, CAI Yingfeng, et al. A comparative study of state-of-the-art deep learning algorithms for vehicle detection[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 11(2): 82–95. doi: 10.1109/MITS.2019.2903518 LUO Hengliang, YANG Yi, TONG Bei, et al. Traffic sign recognition using a multi-task convolutional neural network[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(4): 1100–1111. doi: 10.1109/TITS.2017.2714691 PADEN B, ČÁP M, YONG S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33–55. doi: 10.1109/TIV.2016.2578706 URMSON C, ANHALT J, BAGNELL D, et al. Autonomous driving in urban environments: Boss and the urban challenge[J]. Journal of Field Robotics, 2008, 25(8): 425–466. doi: 10.1002/rob.20255 MONTEMERLO M, BECKER J, BHAT S, et al. Junior: The Stanford entry in the urban challenge[J]. Journal of Field Robotics, 2008, 25(9): 569–597. doi: 10.1002/rob.20258 BACHA A, BAUMAN C, FARUQUE R, et al. Odin: Team VictorTango’s entry in the DARPA urban challenge[J]. Journal of Field Robotics, 2008, 25(8): 467–492. doi: 10.1002/rob.20248 BRECHTEL S, GINDELE T, and DILLMANN R. Probabilistic decision-making under uncertainty for autonomous driving using continuous POMDPs[C]. The 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 2014: 392–399. doi: 10.1109/ITSC.2014.6957722. LIU Wei, KIM S, PENDLETON S, et al. Situation-aware decision making for autonomous driving on urban road using online POMDP[C]. 2015 IEEE Intelligent Vehicles Symposium, Seoul, South Korea, 2015: 1126–1133. doi: 10.1109/IVS.2015.7225835. WANG Tao and ZHU Zhigang. Multimodal and multi-task audio-visual vehicle detection and classification[C]. The 2012 IEEE Ninth International Conference on Advanced Video and Signal-Based Surveillance, Beijing, China, 2012: 440–446. doi: 10.1109/AVSS.2012.47. CHEN Zhilu and HUANG Xinming. End-to-end learning for lane keeping of self-driving cars[C]. The 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, USA, 2017: 1856–1860. doi: 10.1109/IVS.2017.7995975. SYDNEY N, PALEY D A, and SOFGE D. Physics-inspired motion planning for information-theoretic target detection using multiple aerial robots[J]. Autonomous Robots, 2017, 41(1): 231–241. doi: 10.1007/s10514-015-9542-0 KALA R and WARWICK K. Multi-level planning for semi-autonomous vehicles in traffic scenarios based on separation maximization[J]. Journal of Intelligent & Robotic Systems, 2013, 72(3/4): 559–590. doi: 10.1007/s10846-013-9817-7 BOHREN J, FOOTE T, KELLER J, et al. Little Ben: The ben franklin racing team’s entry in the 2007 DARPA urban challenge[J]. Journal of Field Robotics, 2008, 25(9): 598–614. doi: 10.1002/rob.20260 DECHTER R and PEARL J. Generalized best-first search strategies and the optimality of A[J]. Journal of the ACM, 1985, 32(3): 505–536. doi: 10.1145/3828.3830 LI Qianru, WEI Chen, WU Jiang, et al. Improved PRM method of low altitude penetration trajectory planning for UAVs[C]. 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 2014: 2651–2656. doi: 10.1109/CGNCC.2014.7007587. CHIANG H T L and TAPIA L. COLREG-RRT: An RRT-based COLREGS-compliant motion planner for surface vehicle navigation[J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2024–2031. doi: 10.1109/LRA.2018.2801881 ZHANG Haojian, WANG Yunkuan, ZHENG Jun, et al. Path planning of industrial robot based on improved RRT algorithm in complex environments[J]. IEEE Access, 2018, 6: 53296–53306. doi: 10.1109/ACCESS.2018.2871222 QIAN Xiangjun, ALTCHÉ F, BENDER P, et al. Optimal trajectory planning for autonomous driving integrating logical constraints: An MIQP perspective[C]. The 19th IEEE International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 205–210. doi: 10.1109/ITSC.2016.7795555. LI Xiaohui, SUN Zhenping, CAO Dongpu, et al. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles[J]. Mechanical Systems and Signal Processing, 2017, 87: 118–137. doi: 10.1016/j.ymssp.2015.10.021 VAHIDI A and ESKANDARIAN A. Research advances in intelligent collision avoidance and adaptive cruise control[J]. IEEE Transactions on Intelligent Transportation Systems, 2003, 4(3): 143–153. doi: 10.1109/TITS.2003.821292 ZHANG Hui and WANG Junmin. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach[J]. IEEE Transactions on Vehicular Technology, 2016, 65(1): 489–494. doi: 10.1109/TVT.2015.2391184 LEFÈVRE S, CARVALHO A, and BORRELLI F. A learning-based framework for velocity control in autonomous driving[J]. IEEE Transactions on Automation Science and Engineering, 2016, 13(1): 32–42. doi: 10.1109/TASE.2015.2498192 DO W, ROUHANI O, and MIRANDA-MORENO L. Simulation-based connected and automated vehicle models on highway sections: A literature review[J]. Journal of Advanced Transportation, 2019: 9343705. doi: 10.1155/2019/9343705 HAN Jingqing. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900–906. doi: 10.1109/TIE.2008.2011621 CHEN Long, CHEN Te, XU Xing, et al. Multi-objective coordination control strategy of distributed drive electric vehicle by orientated tire force distribution method[J]. IEEE Access, 2018, 6: 69559–69574. doi: 10.1109/ACCESS.2018.2877801 HUANG Jihua and TOMIZUKA M. LTV controller design for vehicle lateral control under fault in rear sensors[J]. IEEE/ASME Transactions on Mechatronics, 2005, 10(1): 1–7. doi: 10.1109/TMECH.2004.839044 TAGNE G, TALJ R, and CHARARA A. Design and comparison of robust nonlinear controllers for the lateral dynamics of intelligent vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(3): 796–809. doi: 10.1109/TITS.2015.2486815 HU Chuan, WANG Rongrong, YAN Fengjun, et al. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4033–4043. doi: 10.1109/TVT.2015.2472975 LI Ye, GUO Hongda, GONG Hao, et al. The improved adaptive hybrid fuzzy control of AUV horizontal motion[C]. The 13th International Computer Conference on Wavelet Active Media Technology and Information Processing, Chengdu, China, 2016: 408–414. doi: 10.1109/ICCWAMTIP.2016.8079883. CUI Rongxin, YANG Chenguang, LI Yang, et al. Adaptive neural network control of AUVs with control input nonlinearities using reinforcement learning[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(6): 1019–1029. doi: 10.1109/TSMC.2016.2645699 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2): 151–159. doi: 10.3969/j.issn.1674-8484.2016.02.003GUO Jinghua, LI Keqiang, and LUO Yugong. Review on the research of motion control for intelligent vehicles[J]. Journal of Automotive Safety and Energy, 2016, 7(2): 151–159. doi: 10.3969/j.issn.1674-8484.2016.02.003 LIU Kai, GONG Jianwei, KURT A, et al. A model predictive-based approach for longitudinal control in autonomous driving with lateral interruptions[C]. The 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, USA, 2017: 359–364. doi: 10.1109/IVS.2017.7995745. GUO Jinghua, LUO Yugong, LI Keqiang, et al. A novel fuzzy-sliding automatic speed control of intelligent vehicles with adaptive boundary layer[J]. International Journal of Vehicle Design, 2017, 73(4): 300–318. doi: 10.1504/IJVD.2017.10004142 PETIT J, SCHAUB F, FEIRI M, et al. Pseudonym schemes in vehicular networks: A survey[J]. IEEE Communications Surveys & Tutorials, 2015, 17(1): 228–255. doi: 10.1109/COMST.2014.2345420 DANIEL A, PAUL A, AHMAD A, et al. Cooperative intelligence of vehicles for Intelligent Transportation Systems (ITS)[J]. Wireless Personal Communications, 2016, 87(2): 461–484. doi: 10.1007/s11277-015-3078-7 HARTMAN K and STRASSER J. Saving lives through advanced vehicle safety technology: Intelligent vehicle initiative[R]. Publication No. FHWA-JPO-05-057, 2005. FARRADYNE P B. Vehicle infrastructure integration (VII): VII architecture and functional requirements[R]. 2005. BISHOP R. A survey of intelligent vehicle applications worldwide[C]. The IEEE Intelligent Vehicles Symposium 2000(Cat. No.00TH8511), Dearborn, USA, 2000: 25–30. doi: 10.1109/IVS.2000.898313. EuroRAP AISBL. Final technical implementation report-European road safety atlas[EB/OL]. https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/projects_sources/euro_safety_atlas_final_report.pdf, 2011. 张毅, 姚丹亚. 基于车路协同的智能交通系统体系框架[M]. 北京: 电子工业出版社, 2015.ZHANG Yi and YAO Danya. Architecture for Intelligent Transportation Systems Based on Intelligent Vehicle-Infrastructure Cooperation Systems[M]. Beijing: Publishing House of Electronics Industry, 2015. 郭戈, 许阳光, 徐涛, 等. 网联共享车路协同智能交通系统综述[J]. 控制与决策, 2019, 34(11): 2375–2389. doi: 10.13195/j.kzyjc.2019.1316GUO Ge, XU Yangguang, XU Tao, et al. A survey of connected shared vehicle-road cooperative intelligent transportation systems[J]. Control and Decision, 2019, 34(11): 2375–2389. doi: 10.13195/j.kzyjc.2019.1316 CHEN Shanzhi, HU Jinling, SHI Yan, et al. Vehicle-to-Everything (V2X) services supported by LTE-based systems and 5G[J]. IEEE Communications Standards Magazine, 2017, 1(2): 70–76. doi: 10.1109/MCOMSTD.2017.1700015 钱志鸿, 王雪. 面向5G通信网的D2D技术综述[J]. 通信学报, 2016, 37(7): 1–14. doi: 10.11959/j.issn.1000-436x.2016129QIAN Zhihong and WANG Xue. Reviews of D2D technology for 5G communication networks[J]. Journal on Communications, 2016, 37(7): 1–14. doi: 10.11959/j.issn.1000-436x.2016129 田春生, 钱志鸿, 阎双叶, 等. D2D通信中联合链路共享与功率分配算法研究[J]. 电子学报, 2019, 47(4): 769–774. doi: 10.3969/j.issn.0372-2112.2019.04.001TIAN Chunsheng, QIAN Zhihong, YAN Shuangye, et al. Research on joint link sharing and power allocation algorithm for device-to-device communications[J]. Acta Electronica Sinica, 2019, 47(4): 769–774. doi: 10.3969/j.issn.0372-2112.2019.04.001 SHEN Xuanfan, LIAO Yong, DAI Xuewu, et al. Joint channel estimation and decoding design for 5G-enabled V2V channel[J]. China Communications, 2018, 15(7): 39–46. doi: 10.1109/CC.2018.8424581 ANUSHYA D. Vehicle monitoring for traffic violation using V2I communication[C]. The 2nd International Conference on Intelligent Computing and Control Systems, Madurai, India, 2018: 1665–1669. doi: 10.1109/ICCONS.2018.8663080. HUSSEIN A, GARCÍA F, ARMINGOL J M, et al. P2V and V2P communication for pedestrian warning on the basis of autonomous vehicles[C]. The 19th IEEE International Conference on Intelligent Transportation Systems, Rio de Janeiro, Brazil, 2016: 2034–2039. doi: 10.1109/ITSC.2016.7795885. MOLINA-MASEGOSA R and GOZALVEZ J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications[J]. IEEE Vehicular Technology Magazine, 2017, 12(4): 30–39. doi: 10.1109/ITSC.2016.7795885 VILLARREAL-VASQUEZ M, BHARGAVA B, and ANGIN P. Adaptable safety and security in V2X systems[C]. The 2017 IEEE International Congress on Internet of Things, Honolulu, USA, 2017: 17–24. doi: 10.1109/IEEE.ICIOT.2017.12. HU Yan, FENG Jingjing, and CHEN Wenli. A LTE-Cellular-based V2X solution to future vehicular network[C]. The 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference, Xi’an, China, 2018: 2658–2662. doi: 10.1109/IMCEC.2018.8469236. DI Boya, SONG Lingyang, LI Yonghui, et al. V2X meets NOMA: Non-orthogonal multiple access for 5G-enabled vehicular networks[J]. IEEE Wireless Communications, 2017, 24(6): 14–21. doi: 10.1109/MWC.2017.1600414 DI Boya, SONG Lingyang, LI Yonghui, et al. Non-orthogonal multiple access for high-reliable and low-latency V2X communications in 5G systems[J]. IEEE Journal on Selected Areas in Communications, 2017, 35(10): 2383–2397. doi: 10.1109/JSAC.2017.2726018 邵雯娟, 沈庆国. 软件定义的D2D和V2X通信研究综述[J]. 通信学报, 2019, 40(4): 179–194. doi: 10.11959/j.issn.1000-436x.2019075SHAO Wenjuan and SHEN Qingguo. Survey of software defined D2D and V2X communication[J]. Journal on Communications, 2019, 40(4): 179–194. doi: 10.11959/j.issn.1000-436x.2019075 PAK W. Fast packet classification for V2X services in 5G networks[J]. Journal of Communications and Networks, 2017, 19(3): 218–226. doi: 10.1109/JCN.2017.000039 STORCK C R and DUARTE-FIGUEIREDO F. A 5G V2X ecosystem providing internet of vehicles[J]. Sensors, 2019, 19(3): 550. doi: 10.3390/s19030550 魏志强, 毕海霞. 基于聚类识别的极化SAR图像分类[J]. 电子与信息学报, 2018, 40(12): 2795–2803. doi: 10.11999/JEIT180229WEI Zhiqiang and BI Haixia. PolSAR image classification based on discriminative clustering[J]. Journal of Electronics &Information Technology, 2018, 40(12): 2795–2803. doi: 10.11999/JEIT180229 SOLDIN R J. SAR target recognition with deep learning[C]. The 2018 IEEE Applied Imagery Pattern Recognition Workshop, Washington, USA, 2018: 1–8. doi: 10.1109/AIPR.2018.8707419. LI Tingli and DU Lan. SAR automatic target recognition based on attribute scattering center model and discriminative dictionary learning[J]. IEEE Sensors Journal, 2019, 19(12): 4598–4611. doi: 10.1109/JSEN.2019.2901050 WANG Zi, ZHAO Zhiwei, MIN Geyong, et al. User mobility aware task assignment for mobile edge computing[J]. Future Generation Computer Systems, 2018, 85: 1–8. doi: 10.1016/j.future.2018.02.014 LI Hongxing, SHOU Guochu, HU Yihong, et al. Mobile edge computing: Progress and challenges[C]. The 4th IEEE International Conference on Mobile Cloud Computing, Services, and Engineering, Oxford, UK, 2016: 83–84. doi: 10.1109/MobileCloud.2016.16. HINTON G E, OSINDERO S, and THE Y W. A fast learning algorithm for deep belief nets[J]. Neural Computation, 2006, 18(7): 1527–1554. doi: 10.1162/neco.2006.18.7.1527 -

 下载:
下载:





图(7) / 表(2)
计量
- 文章访问数: 8287
- HTML全文浏览量: 4113
- PDF下载量: 721
- 被引次数: 0
