

On the Hardness of the Asymmetric Learning With Errors Problem
-
摘要: 由于基于最坏情况困难假设等优点,基于格的密码被认为是最具前景的抗量子密码研究方向。作为格密码的常用的两个主要困难问题之一,含错学习(LWE)问题被广泛用于密码算法的设计。为了提高格密码算法的性能,Zhang等人(2019)提出了非对称含错学习问题,该文将从理论上详细研究非对称含错学习问题和标准含错学习问题关系,并证明在特定错误分布下非对称含错学习问题和含错学习问题是多项式时间等价的,从而为基于非对称含错学习问题设计安全的格密码算法奠定了理论基础。Abstract: Due to the advantages such as the worst-case hardness assumption, lattice-based cryptography is believed to the most promising research direction in post-quantum cryptography. As one of the two main hard problems commonly used in lattice-based cryptography, Learning With Errors (LWE) problem is widely used in constructing numerous cryptosystems. In order to improve the efficiency of lattice-based cryptosystems, Zhang et al. (2019) introduced the Asymmetric LWE (ALWE) problem. In this paper, the relation between the ALWE problem and the standard LWE problem is studied, and it shows that for certain error distributions the two problems are polynomially equivent, which paves the way for constructing secure lattice-based cryptosystems from the ALWE problem.
-
SHOR P W. Polynomial-time algorithms for prime factorization and discrete logarithms on a quantum computer[J]. SIAM Journal on Computing, 1997, 26(5): 1484–1509. doi: 10.1137/S0097539795293172 NSA. National Security Agency. Cryptography today[EB/OL]. https://www.nsa.gov/ia/programs/suiteb_cryptography/, 2015. NIST. Post-quantum cryptography standardization[EB/OL]. http://csrc.nist.gov/groups/ST/post-quantum-crypto/submission-requirements/index.html, 2016. 中国科学技术学会. 科普时报: 中国科协发布12个领域60大科技难题[EB/OL]. http://www.cast.org.cn/art/2018/6/22/art_90_77662.html, 2018. REGEV O. On lattices, learning with errors, random linear codes, and cryptography[C]. The 37th Annual ACM Symposium on Theory of Computing, Baltimore, USA, 2005: 84–93. AJTAI M. Generating hard instances of lattice problems (extended abstract)[C]. The 28th Annual ACM Symposium on Theory of Computing, Philadelphia, USA,1996: 99–108. ZHANG Jiang, YU Yu, FAN Shuqin, et al. Tweaking the asymmetry of asymmetric-key cryptography on lattices: KEMs and signatures of smaller sizes[R]. Cryptology ePrint Archive 2019/510, 2019. APPLEBAUM B, CASH D, PEIKERT C, et al. Fast cryptographic primitives and circular-secure encryption based on hard learning problems[C]. The 29th Annual International Cryptology Conference on Advances in Cryptology, Santa Barbara, USA, 2009: 595–618. MICCIANCIO D and REGEV O. Worst-case to average-case reductions based on Gaussian measures[C]. The 45th Annual IEEE Symposium on Foundations of Computer Science, Rome, Italy, 2004: 372–381. PEIKERT C. An efficient and parallel Gaussian sampler for lattices[C]. The 30th Annual Conference on Advances in Cryptology, Santa Barbara, USA, 2010: 80–97. -

 下载:
下载:


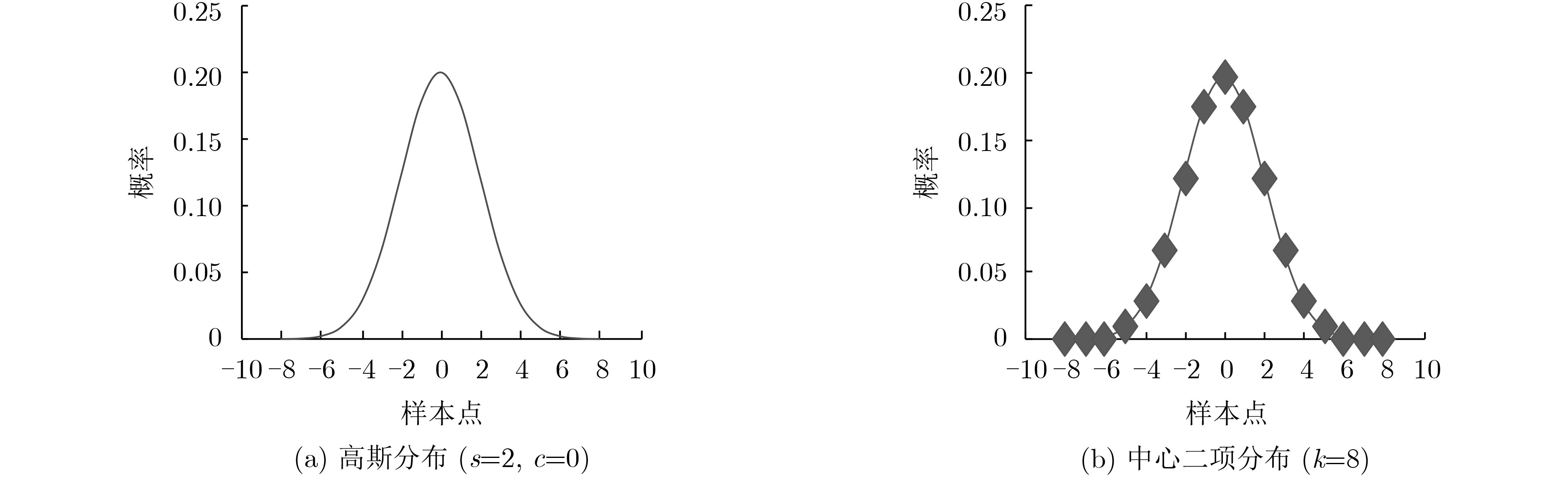
图(1)
计量
- 文章访问数: 3057
- HTML全文浏览量: 1244
- PDF下载量: 116
- 被引次数: 0
