

A Novel Imaging Approach for Improving Azimuth Angular Resolution of Automotive Radars
-
摘要:
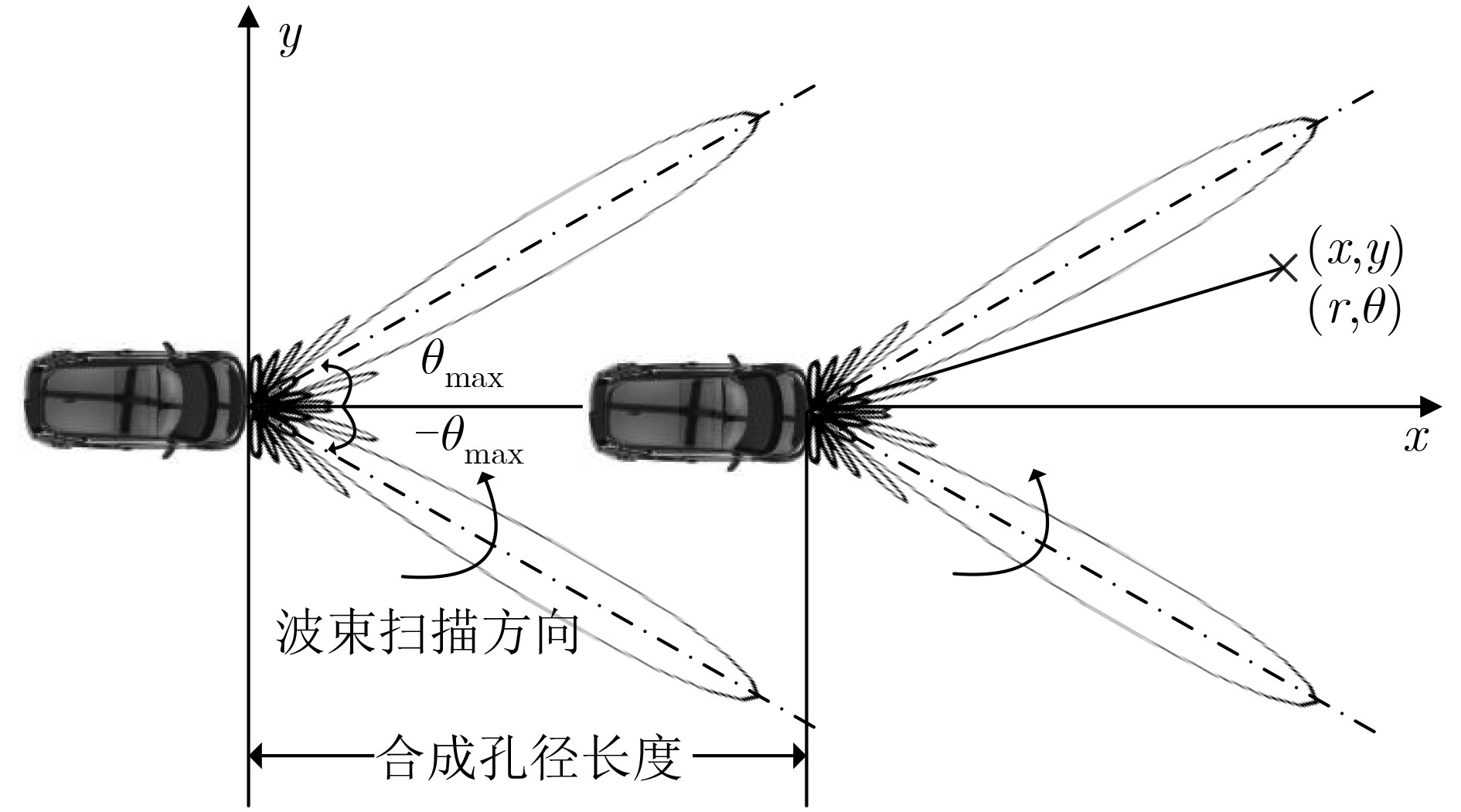
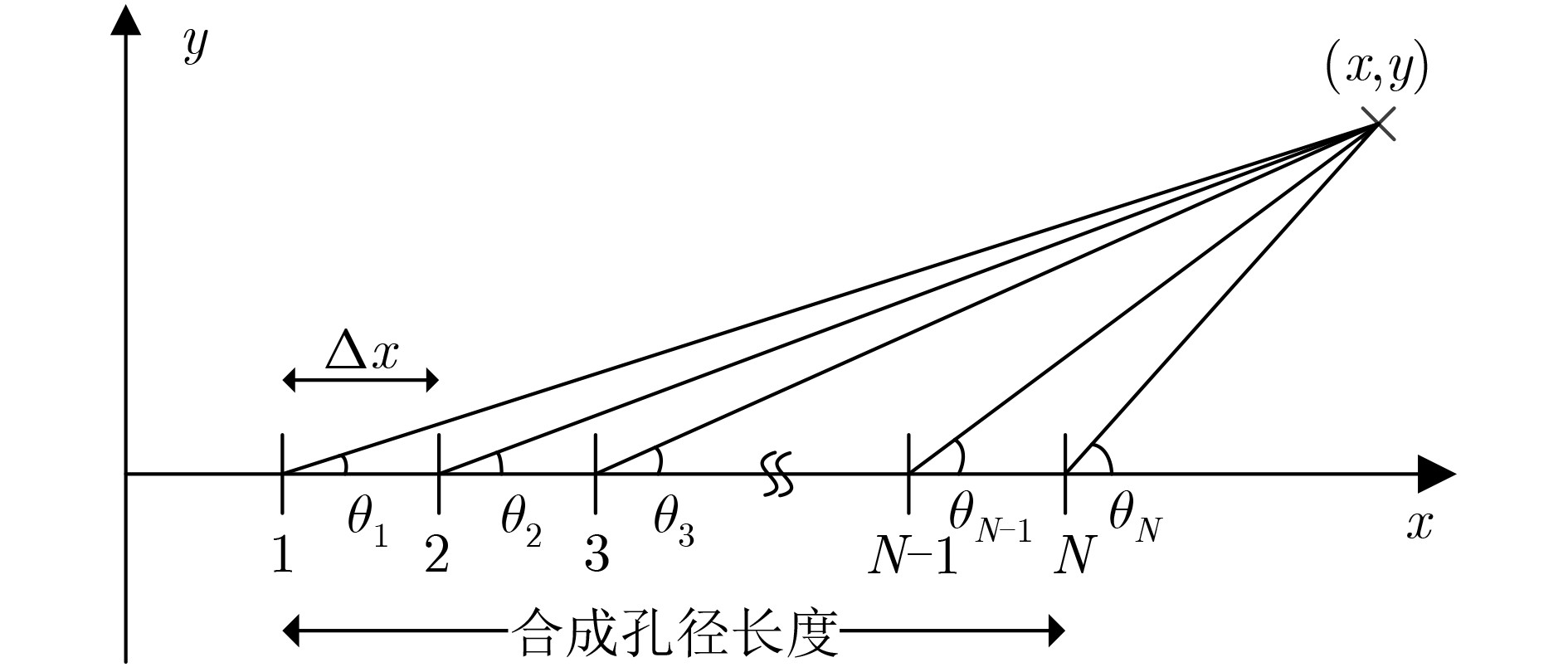
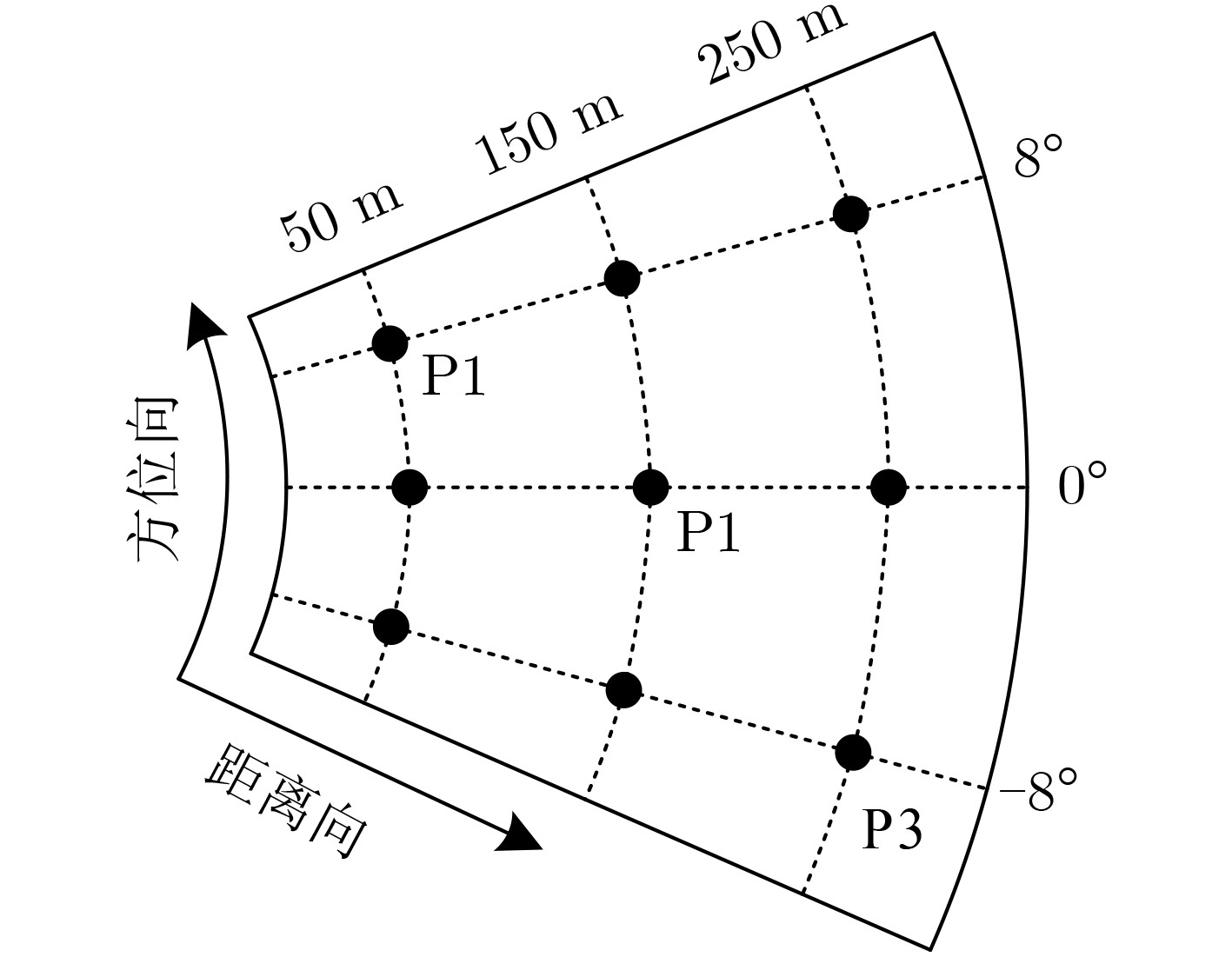
针对汽车雷达方位角分辨率受方位向天线长度限制的问题,该文提出一种基于多波束实孔径雷达图像融合来提升汽车雷达方位角分辨率的成像方法。该方法首先利用相控阵天线波束电扫描来获取前视实孔径雷达图像,然后根据汽车雷达成像几何关系通过多张多角度实孔径雷达图像相参累加来提升雷达方位角分辨率。计算机仿真结果验证了该方法在提升汽车雷达方位角分辨率的有效性。
Abstract:As the azimuth angular resolution is limited by the antenna length in automotive radars, a novel imaging approach for improving azimuth angular resolution of automotive radars is proposed based on multi-beam real-aperture radar images combination processing. Firstly, the antenna beam of the phased array antenna is electronically scanned to obtain forward-looking real-aperture radar images. Afterwards, multiple real-aperture radar images are coherent accumulated according to the imaging geometry of automotive radar to improve azimuth angular resolution. Simulation results validate the proposed imaging approach to improve the azimuth angular resolution of automotive radar.
-
表 1 车载前视成像雷达仿真参数
参数 数值 雷达载频 96 GHz 方位向天线长度 0.3 m 系统PRF 4000 Hz 脉冲宽度 80 μs 信号带宽 1 GHz 去斜接收后雷达信号采样率 150 MHz AD量化位数 12位 方位波束扫描角度范围 ±15° 雷达作用距离 20~300 m 波束跃度 0.3° 合成孔径长度 10 m 汽车速度 15 m/s  下载: 导出CSV
下载: 导出CSV
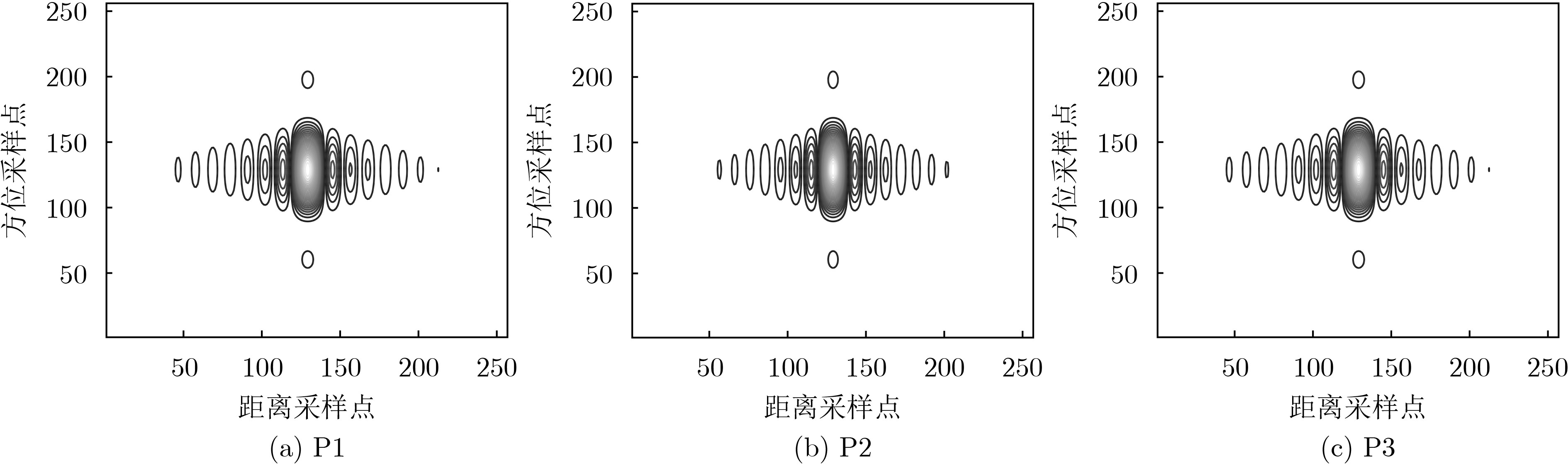
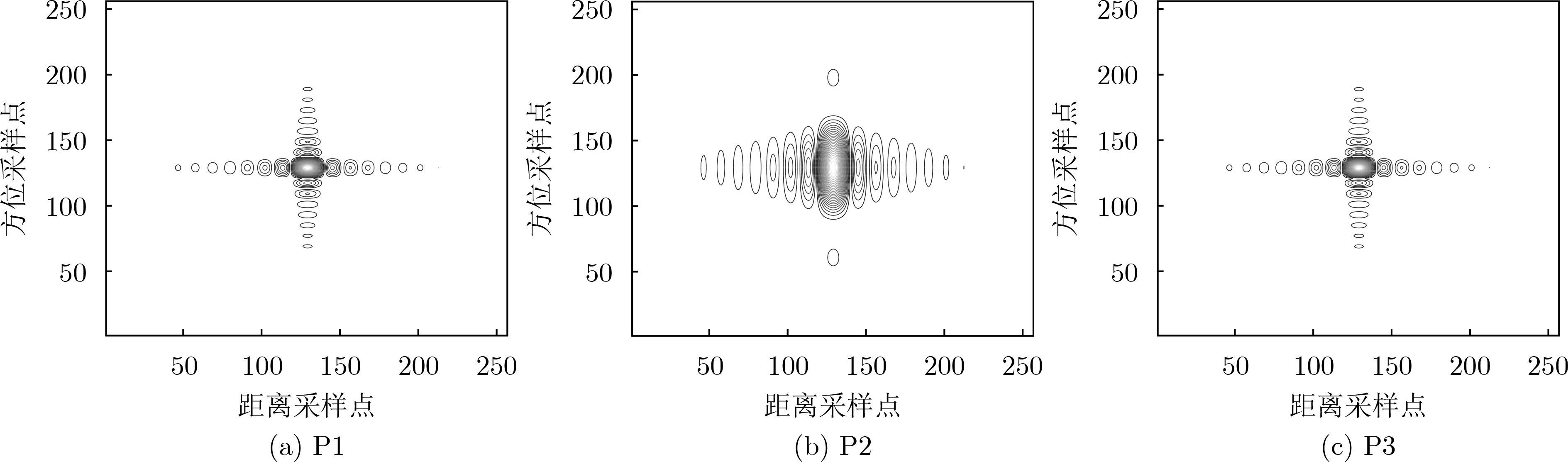
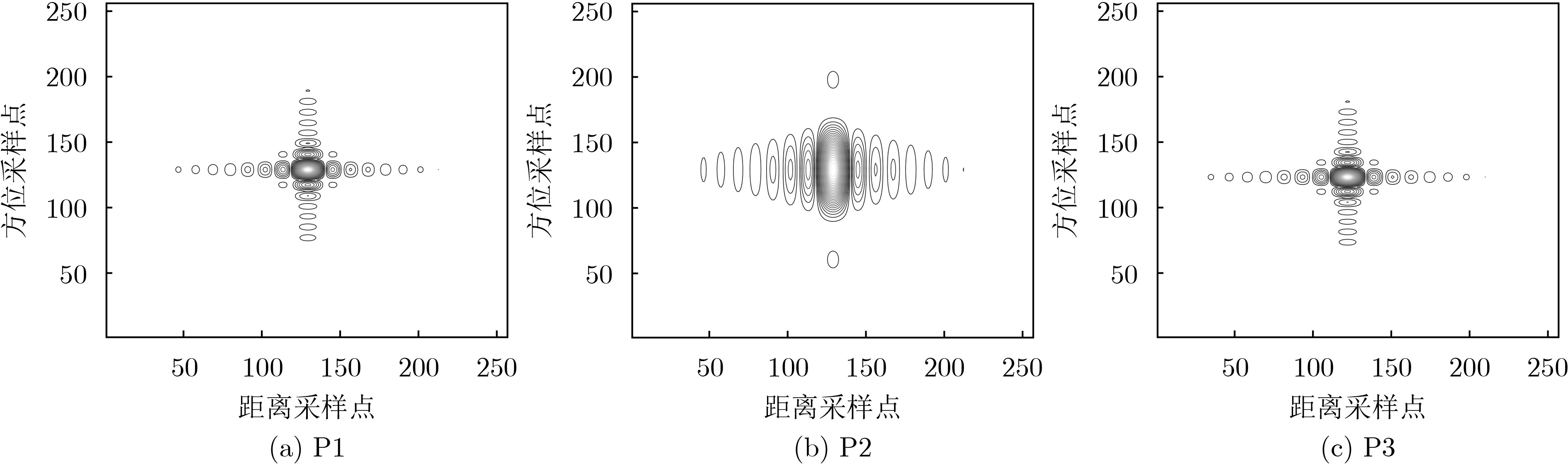
表 2 点目标聚焦性能指标
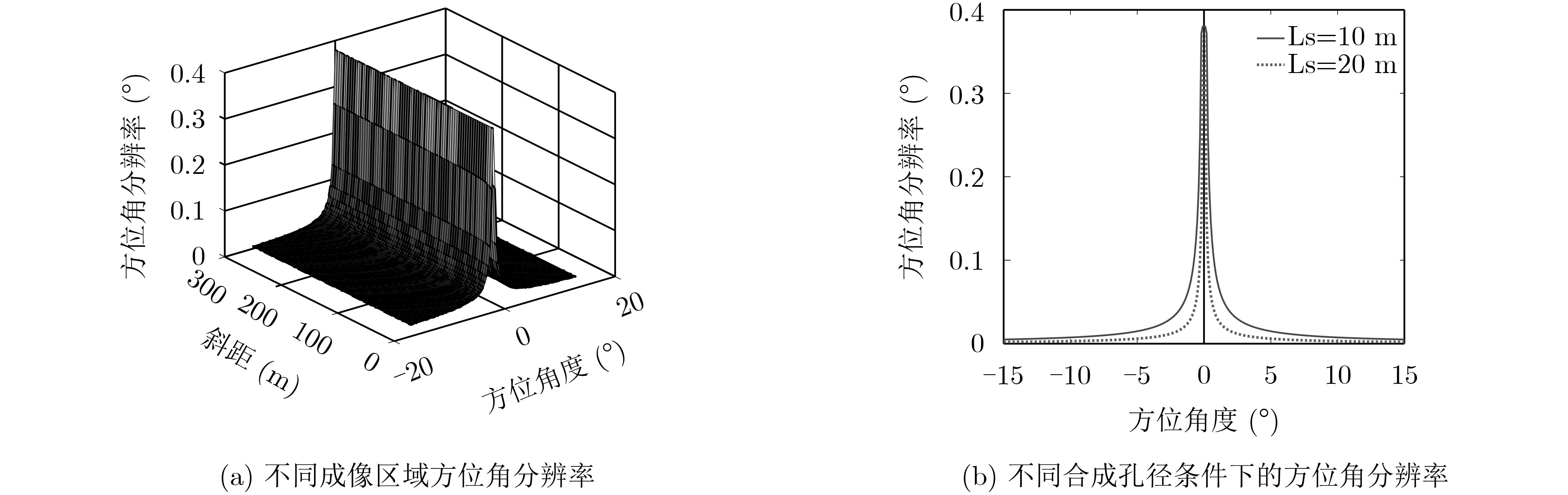
模式 目标 距离向 方位向 分辨率(m) PSLR(dB) ISLR(dB) 分辨率(°) PSLR(dB) ISLR(dB) 实孔径图像 P1 0.09 –13.26 –9.98 0.390 –26.40 –22.24 P2 0.09 –13.26 –9.98 0.380 –26.52 –22.47 P3 0.09 –13.26 –9.98 0.390 –26.40 –22.24 实孔径理论值 P1 0.09 –13.26 –9.80 0.380 –26.60 –22.30 P2 0.09 –13.26 –9.80 0.380 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.380 –26.60 –22.30 合成处理图像(10 m合成孔径) P1 0.09 –13.26 –9.98 0.010 –13.18 –9.74 P2 0.09 –13.26 –9.98 0.390 –26.52 –22.29 P3 0.09 –13.26 –9.98 0.010 –13.18 –9.74 合成处理理论值(10 m合成孔径) P1 0.09 –13.26 –9.80 0.010 –13.26 –9.80 P2 0.09 –13.26 –9.80 0.390 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.010 –13.26 –9.80 合成处理图像(15 m合成孔径) P1 0.09 –13.06 –9.72 0.007 –13.08 –9.44 P2 0.09 –13.26 –9.98 0.390 –26.52 –22.29 P3 0.09 –13.06 –9.72 0.007 –13.07 –9.40 合成处理理论值(15 m合成孔径) P1 0.09 –13.26 –9.80 0.007 –13.26 –9.80 P2 0.09 –13.26 –9.80 0.390 –26.60 –22.30 P3 0.09 –13.26 –9.80 0.007 –13.26 –9.80
下载: 导出CSV
-
XU Zhihuo, SHI Quan, SUN Ling, et al. Novel orthogonal random phase-coded pulsed radar for automotive application[J]. Journal of Radars, 2018, 7(3): 364–375. doi: 10.12000/JR17083 PATOLE S M, TORLAK M, WANG Dan, et al. Automotive radars: A review of signal processing techniques[J]. IEEE Signal Processing Magazine, 2017, 34(2): 22–35. doi: 10.1109/MSP.2016.2628914 KRONAUGE M and ROHLING H. New chirp sequence radar waveform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2870–2877. doi: 10.1109/TAES.2014.120813 TAK J, JEONG E, and CHOI J. Metamaterial absorbers for 24-GHz automotive radar applications[J]. Journal of Electromagnetic Waves and Applications, 2017, 31(6): 577–593. doi: 10.1080/09205071.2017.1297257 GUO Kunyi, HOARE E G, JASTEH D, et al. Road edge recognition using the stripe hough transform from millimeter-wave radar images[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 825–833. doi: 10.1109/TITS.2014.2342875 MAO Xuesong, INOUE D, MATSUBARA H, et al. Demonstration of in-car doppler laser radar at 1.55 μm for range and speed measurement[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 599–607. doi: 10.1109/TITS.2012.2230325 LEE J E, LIM H S, JEONG S H, et al. Enhanced iron-tunnel recognition for automotive radars[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4412–4418. doi: 10.1109/TVT.2015.2460992 KELLNER D, BARJENBRUCH M, KLAPPSTEIN J, et al. Tracking of extended objects with high-resolution Doppler radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(5): 1341–1353. doi: 10.1109/TITS.2015.2501759 WANG Xiao, XU Linhai, SUN Hongbin, et al. On-road vehicle detection and tracking using MMW radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2075–2084. doi: 10.1109/TITS.2016.2533542 WANG H N, HUANG Yingwei, and CHUN S J. Spatial diversity 24-GHz FMCW radar with ground effect compensation for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 965–973. doi: 10.1109/TVT.2016.2565608 ASKELAND S A and EKMAN T. Tracking with a high-resolution 2D spectral estimation based automotive radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2418–2423. doi: 10.1109/TITS.2015.2407571 LEE M S and KIM Y H. Design and performance of a 24-GHz switch-antenna array FMCW radar system for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2010, 59(5): 2290–2297. doi: 10.1109/TVT.2010.2045665 HU Chenxi, LIU Yimin, MENG Huadong, et al. Randomized switched antenna array FMCW radar for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2014, 63(8): 3624–3641. doi: 10.1109/TVT.2014.2308895 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005: 169–170.BAO Zheng, XING Mengdao, and WANG Tong. Radar Imaging Technology[M]. Beijing: Publishing House of Electronics Industry, 2005: 169–170. DEVADITHYA S, PEDROSS-ENGEL A, WATTS C M, et al. GPU-accelerated enhanced resolution 3-D SAR imaging with dynamic metamaterial antennas[J]. IEEE Transactions on Microwave Theory and Techniques, 2017, 65(12): 5096–5103. doi: 10.1109/TMTT.2017.2766060 CHANG W Y, WU Mengche, CHANG Yanglang, et al. GPU acceleration of adaptive local kriging applied to retrieving slant-range surface motion maps[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(11): 4317–4325. doi: 10.1109/JSTARS.2018.2871877 WIJAYASIRI A, BANERJEE T, RANKA S, et al. Dynamic data-driven SAR image reconstruction using multiple GPUs[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(11): 4326–4338. doi: 10.1109/JSTARS.2018.2873198 -

 下载:
下载:




计量
- 文章访问数: 3376
- HTML全文浏览量: 1532
- PDF下载量: 143
- 被引次数: 0
