

High-precision and Real-time Localization Algorithm for Automatic Driving Vehicles
-
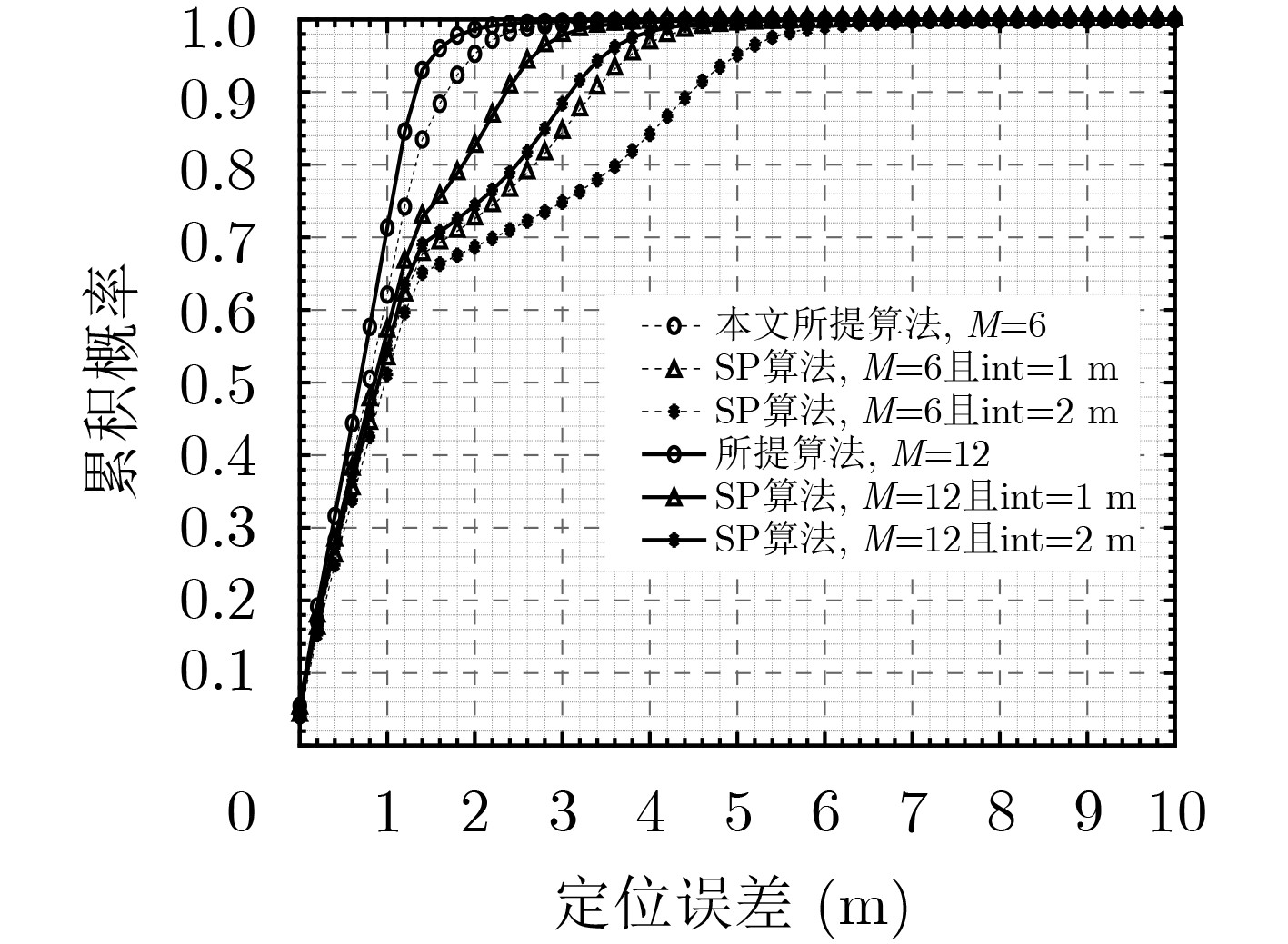
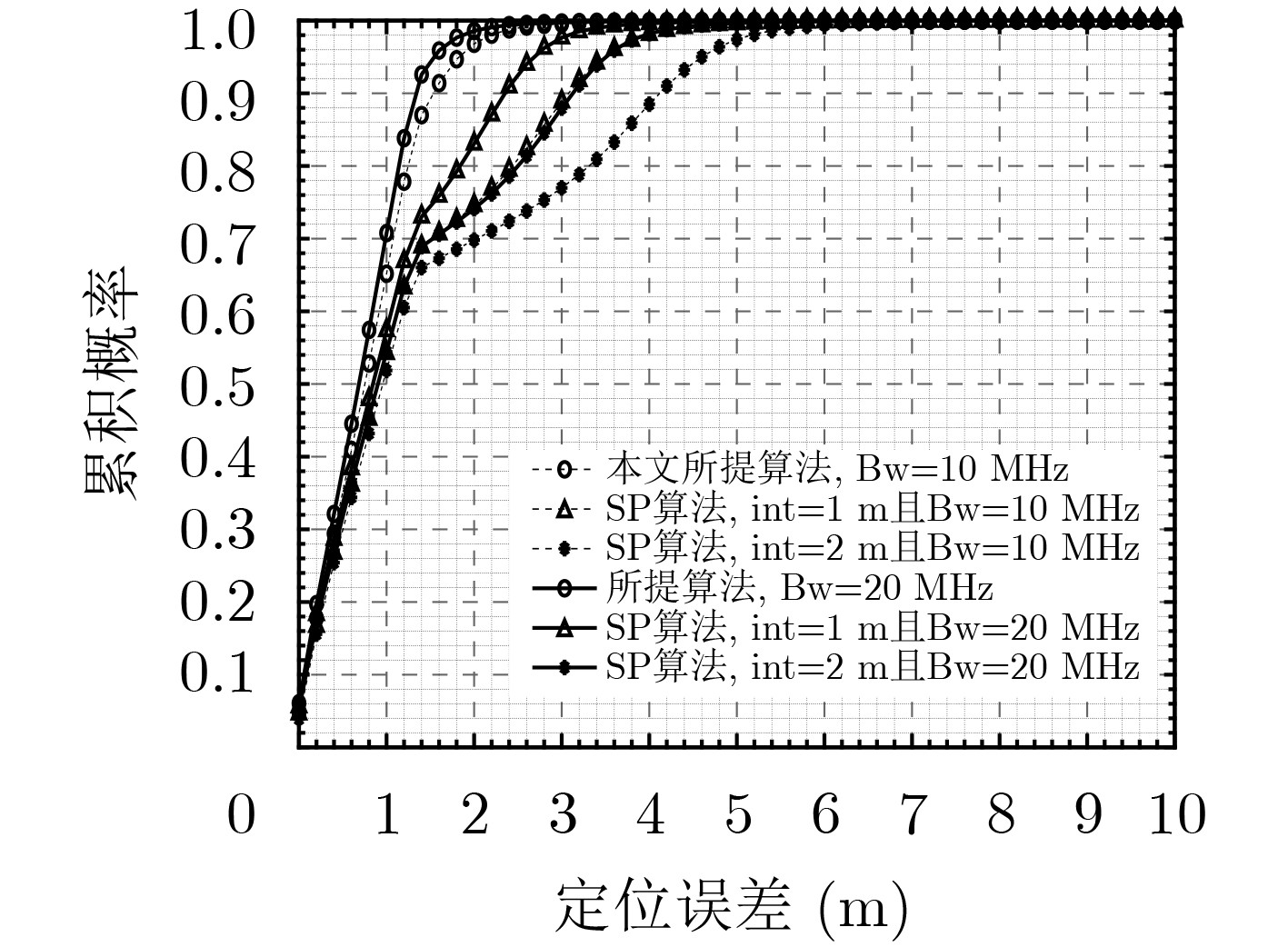
摘要: 针对车辆自组织网络(VANETs)中的车辆定位问题,以提高定位精度和实时性为目标,该文提出一种面向自动驾驶的车辆精确实时定位算法,包括基于矩阵束(MP)与非线性拟合(NLF)以及基于视觉感知两种技术。基于MP-NLF的技术通过联合TOA/AOA估计进行车辆单站定位,并引入高分辨率估计以提高估计精度;基于视觉感知的技术通过提取定位范围内视觉感知图像的特征信息来完成定位,并结合惯性信息进行无迹卡尔曼滤波进一步提高精度。仿真结果表明,与传统多径指纹算法相比,所提算法即使在低信噪比情况下也具有较好的定位性能。Abstract: For the problem of vehicle positioning in Vehicular Ad-hoc NETworks (VANETs), in order to improve the positioning accuracy and real-time performance, a high-precision and real-time localization algorithm for automatic driving vehicles is proposed, including two technologies based on Matrix Pencil (MP) and Non-Linear Fitting (NLF), and visual perception. The MP-NLF technology uses joint TOA/AOA estimation to locate vehicles with a single station, and introduces high resolution estimation technology to improve the estimation accuracy. The visual perception based technology completes the localization by extracting the feature information of visual perceptual images in positioning area, carries on the unscented Kalman filter combined with the inertial sensor information to further improve the positioning accuracy. The simulation results show that, compared with the traditional multipath fingerprinting algorithm, the proposed algorithm has better performance even in the case of low Signal-to-Noise Ratio (SNR).
-
表 1 系统仿真参数设置
仿真参数 参数值 OFDM子载波数目 K = 16 ULA阵元数目M 4/6/8/10/12 信号带宽Bw (MHz) 5/10/20 SP算法中每次快拍的采样数 Ns = 8 SP算法中数据点的快拍数 Ld = 50 SP算法中测试点的快拍数 Lt = 20  下载: 导出CSV
下载: 导出CSV
-
KOOPMAN P and WAGNER M. Autonomous vehicle safety: An interdisciplinary challenge[J]. IEEE Intelligent Transportation Systems Magazine, 2017, 9(1): 90–96. doi: 10.1109/MITS.2016.2583491 MOLINA-MASEGOSA R and GOZALVEZ J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications[J]. IEEE Vehicular Technology Magazine, 2017, 12(4): 30–39. doi: 10.1109/MVT.2017.2752798 LI Linjing, LI Xin, CHENG Changjian, et al. Research collaboration and ITS topic evolution: 10 years at T-ITS[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(3): 517–523. doi: 10.1109/TITS.2010.2059070 SHI Yanjun, PAN Yaohui, ZHANG Zihui, et al. A 5G-V2X based collaborative motion planning for autonomous industrial vehicles at road intersections[C]. 2018 IEEE International Conference on Systems, Man, and Cybernetics, Miyazaki, Japan, 2018: 3744–3748. LUO Guiyang, YUAN Quan, ZHOU Haibo, et al. Cooperative vehicular content distribution in edge computing assisted 5G-VANET[J]. China Communications, 2018, 15(7): 1–17. doi: 10.1109/CC.2018.8424578 CHEN Xiaozhi, MA Huimin, WAN Ji, et al. Multi-view 3D object detection network for autonomous driving[C]. 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 6526–6534. XIAO Yunqiu and REN Dakai. A hierarchical decision architecture for network-assisted automatic driving[C]. 2018 IEEE International Conference on Energy Internet, Beijing, China 2018: 35–37. 段建民, 杨晨, 石慧. 基于Pure Pursuit算法的智能车路径跟踪[J]. 北京工业大学学报, 2016, 42(9): 1301–1306.DUAN Jianmin, YANG Chen, and SHI Hui. Path tracking based on pure pursuit algorithm for intelligent vehicles[J]. Journal of Beijing University of Technology, 2016, 42(9): 1301–1306. 李俨, 曹一卿, 陈书平, 等. 5G与车联网——基于移动通信的车联网技术与智能网联汽车[M]. 北京: 电子工业出版社, 2019. 王庆, 张小国. 车辆组合定位与导航系统——理论、方法及应用[M]. 北京: 科学出版社, 2016. ZHANG Rui, XIA Weiwei, YAN Feng, et al. A single-site positioning method based on TOA and DOA estimation using virtual stations in NLOS environment[J]. China Communications, 2019, 16(2): 146–159. WANG Zhenyu, ZHENG Jun, WU Yuying, et al. A centrality-based RSU deployment approach for vehicular ad hoc networks[C]. 2017 IEEE International Conference on Communications, Paris, France, 2017: 1–5. GABER A and OMAR A. A study of wireless indoor positioning based on joint TDOA and DOA estimation using 2-D matrix pencil algorithms and IEEE 802.11ac[J]. IEEE Transactions on Wireless Communications, 2015, 14(5): 2440–2454. doi: 10.1109/TWC.2014.2386869 AKAIKE H. A new look at the statistical model identification[J]. IEEE Transactions on Automatic Control, 1974, 19(6): 716–723. doi: 10.1109/TAC.1974.1100705 FASCISTA A, CICCARESE G, COLUCCIA A, et al. A localization algorithm based on V2I communications and AOA estimation[J]. IEEE Signal Processing Letters, 2017, 24(1): 126–130. doi: 10.1109/LSP.2016.2639098 ZHANG Dian, LIU Yunhuai, GUO Xiaonan, et al. On distinguishing the multiple radio paths in RSS-based ranging[C]. 2012 Proceedings IEEE INFOCOM. Orlando, USA, 2012: 2201–2209. 黄铫, 张天骐, 高清山, 等. 一种提高无迹卡尔曼滤波精确度的方法[J]. 计算机仿真, 2010, 27(3): 348–352. doi: 10.3969/j.issn.1006-9348.2010.03.085HUANG Yao, ZHANG Tianqi, GAO Qingshan, et al. A method improving the accuracy of UKF[J]. Computer Simulation, 2010, 27(3): 348–352. doi: 10.3969/j.issn.1006-9348.2010.03.085 KUPERSHTEIN E, WAX M, and COHEN I. Single-site emitter localization via multipath fingerprinting[J]. IEEE Transactions on Signal Processing, 2013, 61(1): 10–21. doi: 10.1109/TSP.2012.2222395 -


 下载:
下载:



图(8) / 表(1)
计量
- 文章访问数: 3563
- HTML全文浏览量: 1958
- PDF下载量: 212
- 被引次数: 0
