

Research on Traffic Accident Risk Prediction Algorithm of Edge Internet of Vehicles Based on Deep Learning
-
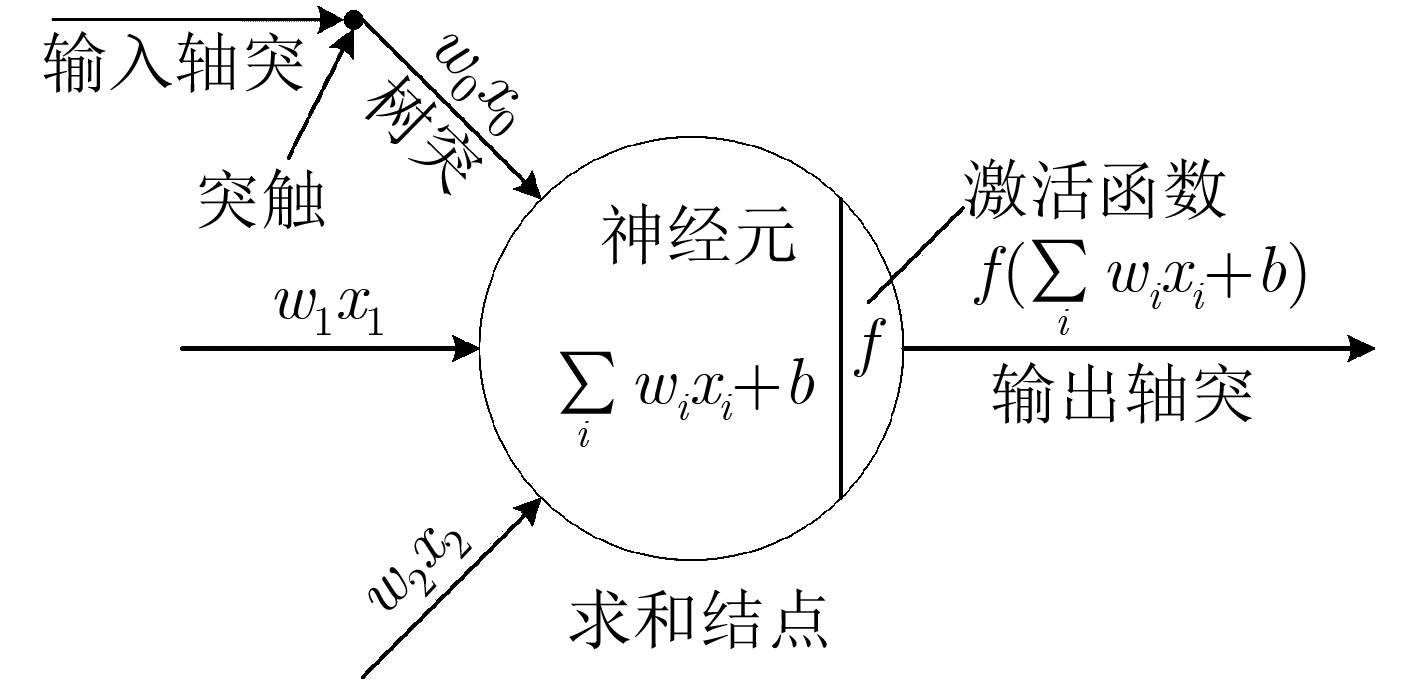
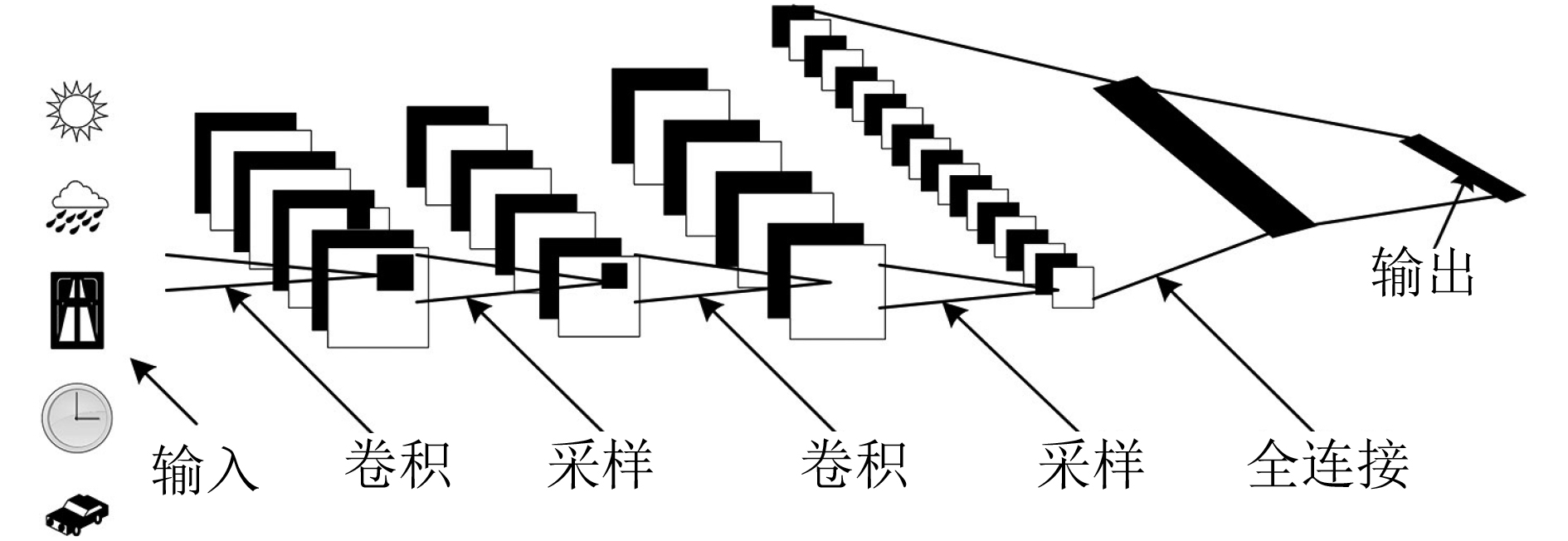
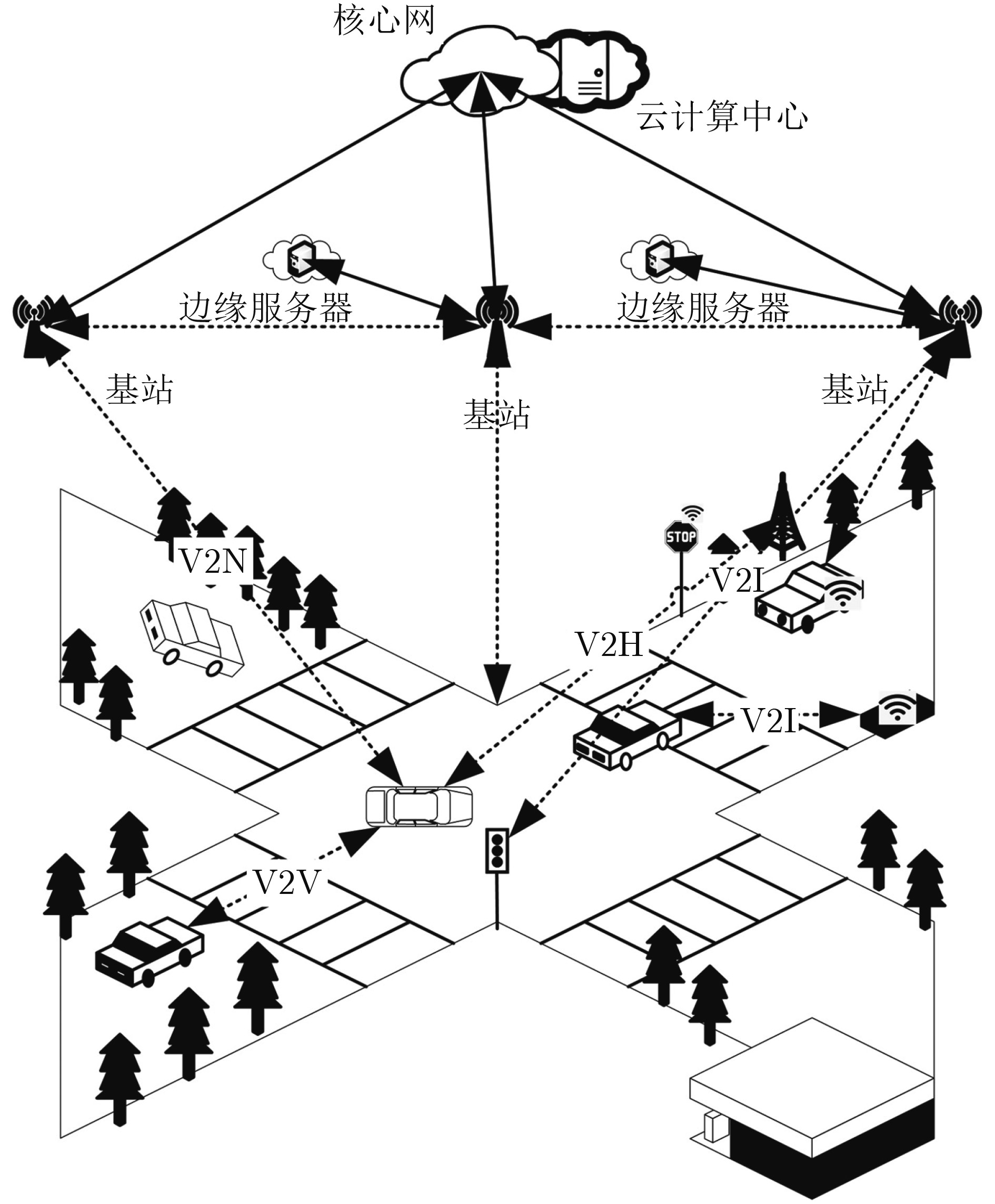
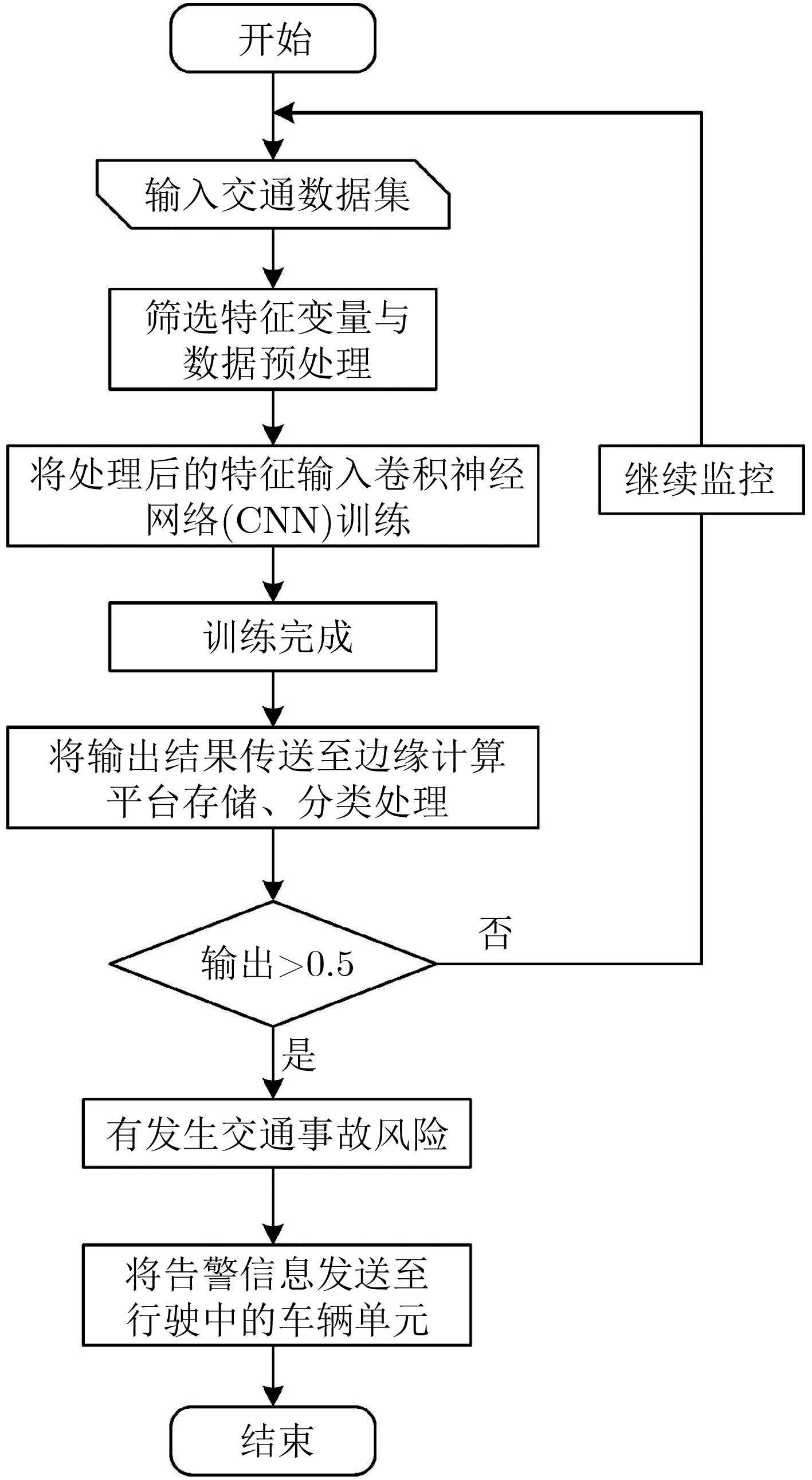
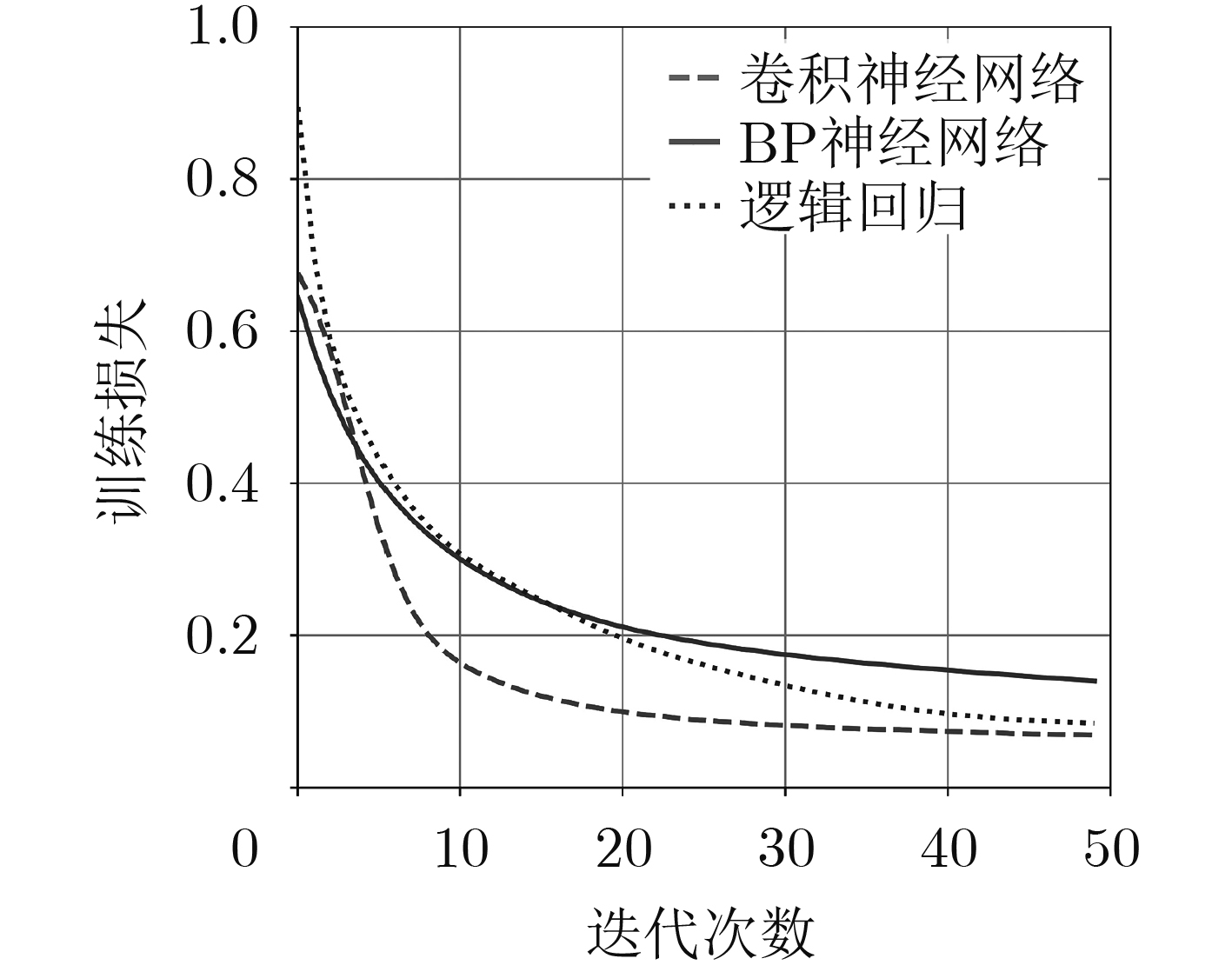
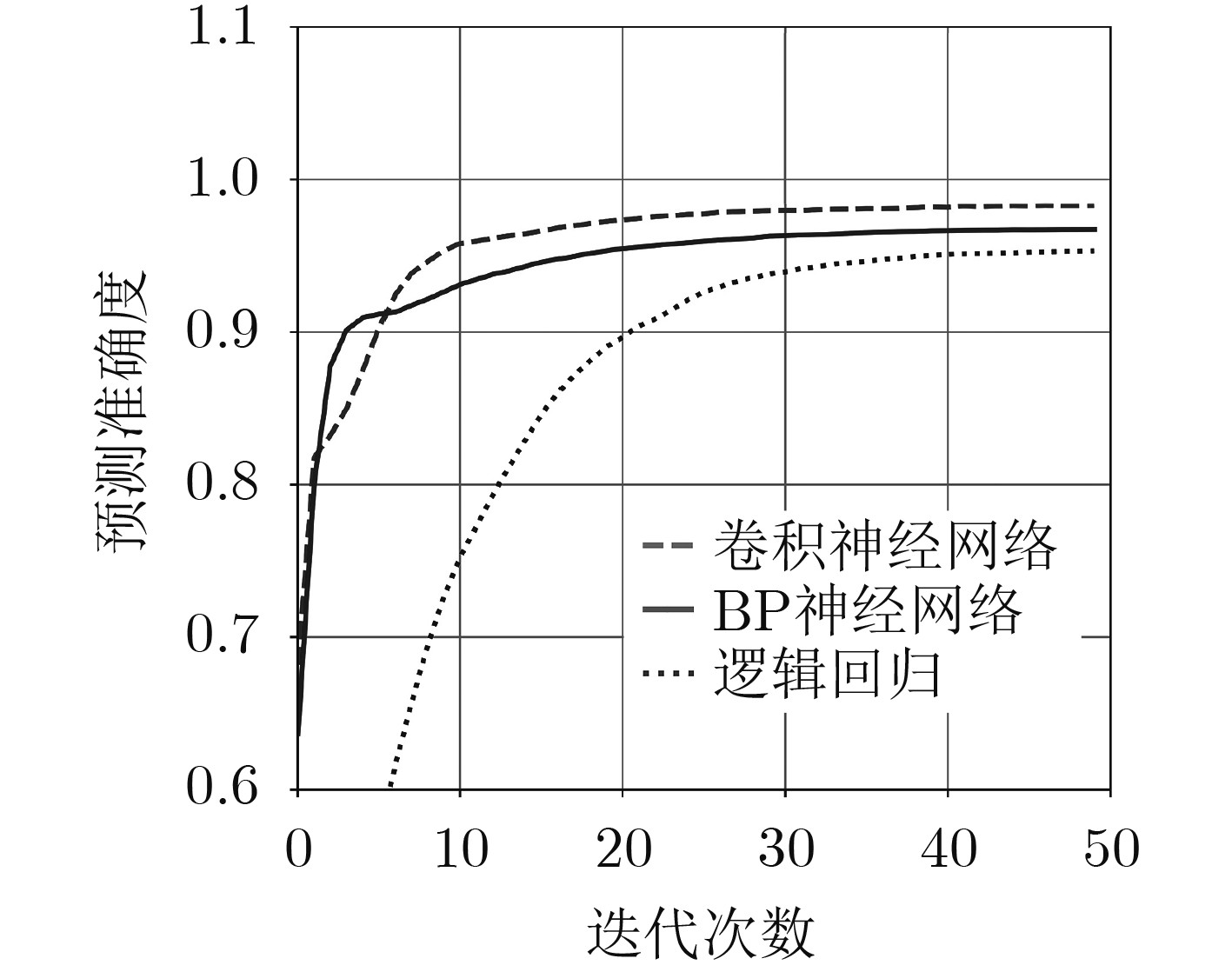
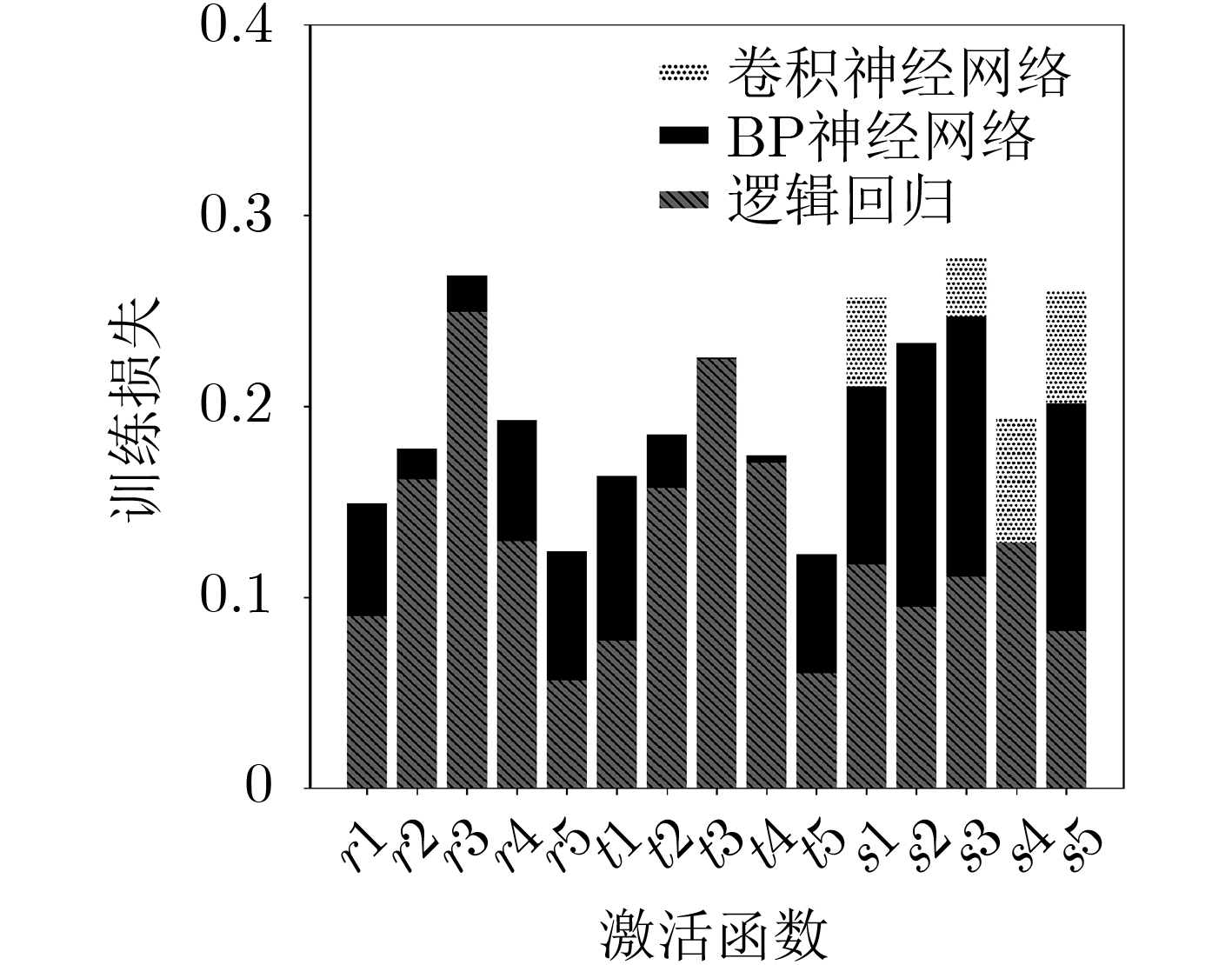
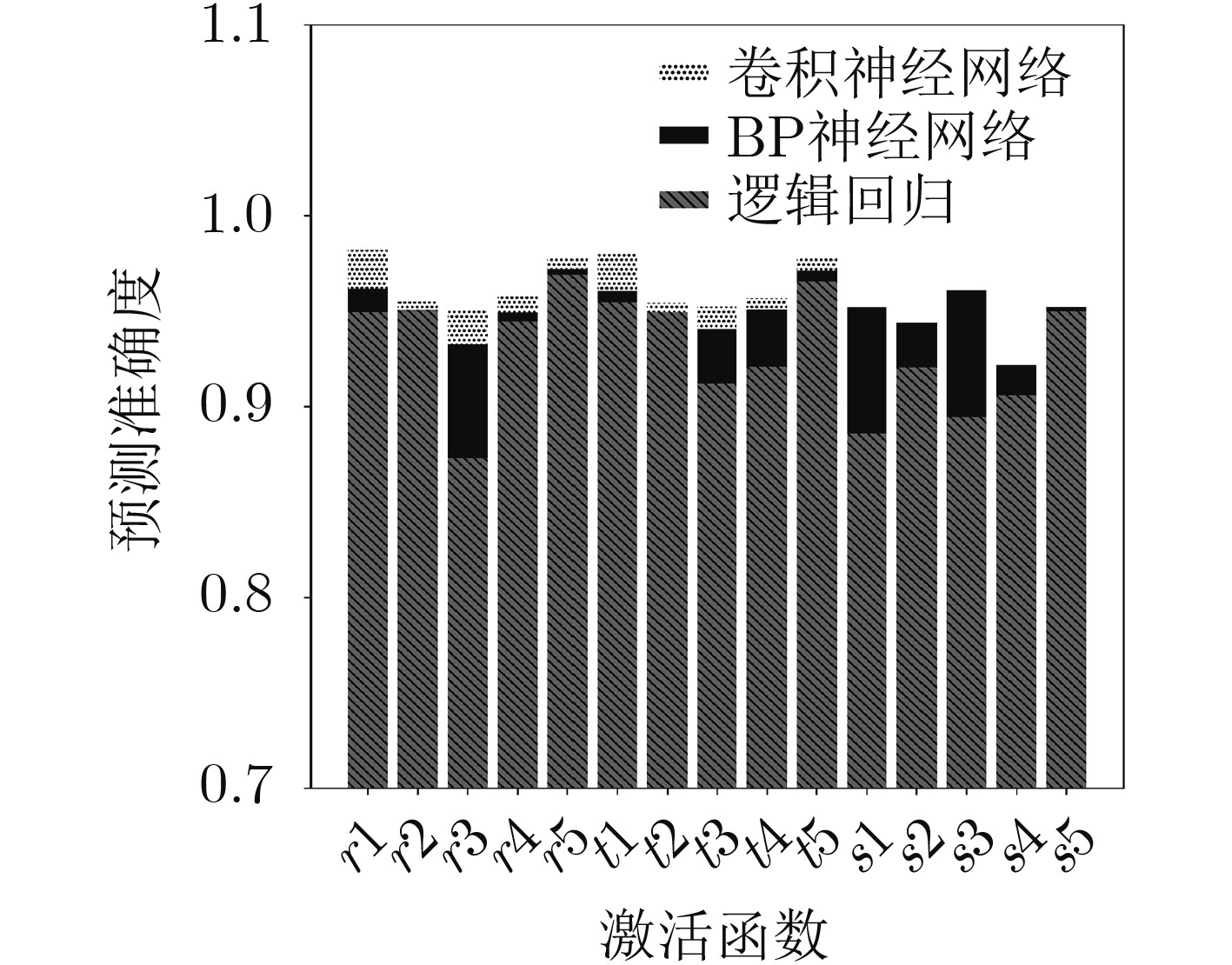
摘要: 针对传统交通事故风险预测算法无法自动判别数据特征,且模型表达能力差等问题。该文提出一种基于深度学习的车联边缘网络交通事故风险预测算法,该算法首先针对车载自组织网络中采集的大量交通数据,采用边缘服务器中建立的卷积神经网络自主提取多维特征,经归一化、去均值等预处理后,再将得到的新变量输入卷积层、采样层进行训练,最后根据全连接层输出的判别值,得到模拟预测交通事故发生的风险性。仿真结果表明,该算法被验证能够预测交通事故发生的风险性,较传统的机器学习算法BP神经网络、逻辑回归具有更低的损失与更高的预测准确度。Abstract: For the problem that the traditional traffic accident risk prediction algorithm can not automatically discriminate data features, and the model expression ability is poor, a traffic accident risk prediction algorithm based on deep learning is proposed. The algorithm firstly extracts multi-dimensional features by using the convolutional neural network established in the edge server for a large amount of traffic data collected in the edge network of vehicles. After normalization, de-equalization and other pre-processing, the new variables are input into the convolutional layer and the pooling layer for training. Finally, based on the output discrimination value of the fully connected layer, the risk of traffic accidents can be predicted by simulation. The simulation results show that the algorithm is validated to predict the risk of traffic accidents, and has lower loss and higher prediction accuracy than the traditional machine learning BP neural network algorithm and Logical Regression algorithm.
-
Key words:
- Edge network of vehicles /
- Machine learning /
- Convolutional neural network /
- Edge server
-
GOTHANE S and SARODE M V. Analyzing factors, construction of dataset, estimating Importance of factor, and generation of association rules for Indian road accident[C]. The 6th IEEE International Conference on Advanced Computing, Bhimavaram, India, 2016: 15–18. doi: 10.1109/IACC.2016.13. IKRAM N and MAHAJAN S. Road accidents: Overview of its causes, avoidance scheme and a new proposed technique for avoidance[C]. The 3rd International Conference on Computing for Sustainable Global Development, New Delhi, India, 2016: 497–499. LIN Lei, WANG Qian, and SADEK A W. Data mining and complex network algorithms for traffic accident analysis[J]. Transportation Research Record: Journal of the Transportation Research Board, 2014, 2460(1): 128–136. doi: 10.3141/2460-14 ZONG Fang, CHEN Xiangru, TANG Jinjun, et al. Analyzing traffic crash severity with combination of information entropy and Bayesian network[J]. IEEE Access, 2019, 7: 63288–63302. doi: 10.1109/ACCESS.2019.2916691 GHOSH B, ASIF M T, and DAUWELS J. Bayesian prediction of the duration of non-recurring road incidents[C]. 2016 IEEE Region 10 Conference, Singapore, 2016: 87–90. doi: 10.1109/TENCON.2016.7847964. 秦利燕, 邵春福, 赵亮. 道路交通事故宏观预测模型[J]. 武汉理工大学学报: 交通科学与工程版, 2010, 34(1): 154–157. doi: 10.3963/j.issn.1006-2823.2010.01.038QIN Liyan, SHAO Chunfu, and ZHAO Liang. Macro prediction model of road traffic accident based on neural network[J]. Journal of Wuhan University of Technology:Transportation Science &Engineering, 2010, 34(1): 154–157. doi: 10.3963/j.issn.1006-2823.2010.01.038 TAO Lu, ZHU Dunyao, YAN Linxin, et al. The traffic accident hotspot prediction: Based on the logistic regression method[C]. 2015 International Conference on Transportation Information and Safety, Wuhan, China, 2015: 107–110. doi: 10.1109/ICTIS.2015.7232194. OLUTAYO V A and ELUDIRE A A. Traffic accident analysis using decision trees and neural networks[J]. International Journal of Information Technology and Computer Science, 2014, 6(2): 22–28. doi: 10.5815/ijitcs.2014.02.03 YU B, WANG Y T, YAO J B, et al. A comparison of the performance of ANN and SVM for the prediction of traffic accident duration[J]. Neural Network World, 2016, 26(3): 271–287. doi: 10.14311/NNW.2016.26.015 ZHAO Haitao, MAO Tianqi, DUAN Jiaxiu, et al. FMCNN: A factorization machine combined neural network for driving safety prediction in vehicular communication[J]. IEEE Access, 2019, 7: 11698–11706. doi: 10.1109/ACCESS.2019.2891619 ZHANG Jian, LI Zhibin, PU Ziyuan, et al. Comparing prediction performance for crash injury severity among various machine learning and statistical methods[J]. IEEE Access, 2018, 6: 60079–60087. doi: 10.1109/ACCESS.2018.2874979 XU Jinlai, PALANISAMY B, LUDWIG H, et al. Zenith: Utility-aware resource allocation for edge computing[C]. 2017 IEEE International Conference on Edge Computing, Honolulu, USA, 2017: 47–54. doi: 10.1109/IEEE.EDGE.2017.15. ZHENG Yang, WANG Jianqiang, LI Xiaofei, et al. Driving risk assessment using cluster analysis based on naturalistic driving data[C]. The 17th IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 2014: 2584–2589. doi: 10.1109/ITSC.2014.6958104. CHEN Yuanfang, SHU Lei, and WANG Lei. Poster abstract: Traffic flow prediction with big data: A deep learning based time series model[C]. 2017 IEEE Conference on Computer Communications Workshops, Atlanta, USA, 2017: 1010–1011. doi: 10.1109/INFCOMW.2017.8116535. 梁晓萍, 郭振军, 朱昌洪. 基于头脑风暴优化算法的BP神经网络模糊图像复原[J]. 电子与信息学报, 2019, 41(12): 2980–2986. doi: 10.11999/JEIT190261LIANG Xiaoping, GUO Zhenjun, and ZHU Changhong. BP neural network fuzzy image restoration based on brainstorm optimization algorithm[J]. Journal of Electronics and Information Technology, 2019, 41(12): 2980–2986. doi: 10.11999/JEIT190261 殷礼胜, 唐圣期, 李胜, 等. 基于整合移动平均自回归和遗传粒子群优化小波神经网络组合模型的交通流预测[J]. 电子与信息学报, 2019, 41(9): 2273–2279. doi: 10.11999/JEIT181073YIN Lisheng, TANG Shengqi, LI Sheng, et al. Traffic flow prediction based on hybrid model of auto-regressive integrated moving average and genetic particle swarm optimization wavelet neural network[J]. Journal of Electronics &Information Technology, 2019, 41(9): 2273–2279. doi: 10.11999/JEIT181073 -

 下载:
下载:


图(8)
计量
- 文章访问数: 4054
- HTML全文浏览量: 1833
- PDF下载量: 224
- 被引次数: 0
 下载:
下载:
